近場試驗條件對二維干涉儀測向系統(tǒng)的影響
2017-11-20 01:12:35李琳,居易
艦船電子對抗 2017年5期
李 琳,居 易
(中國船舶重工集團公司第七二三研究所,江蘇 揚州 225001)
近場試驗條件對二維干涉儀測向系統(tǒng)的影響
李 琳,居 易
(中國船舶重工集團公司第七二三研究所,江蘇 揚州 225001)
基于干涉儀測向原理,分析了干涉儀測向系統(tǒng)近場試驗驗證時產(chǎn)生較大誤差的2種原因,仿真給出了2種條件下二維干涉儀的測向結(jié)果受輻射源距離以及轉(zhuǎn)臺旋轉(zhuǎn)角度的影響,推導(dǎo)出天線位置偏心時的測向誤差校正公式,提出用仿真結(jié)果對試驗中由于球面?zhèn)鞑ギa(chǎn)生的測角誤差進(jìn)行補償?shù)姆椒ā?/p>
干涉儀測向;誤差;偏心;球面?zhèn)鞑?/p>
0 引 言
干涉儀測向技術(shù)自出現(xiàn)以來就以其測向精度高、實時性好、成本低等優(yōu)點被廣泛應(yīng)用于電子偵察領(lǐng)域。干涉儀測向的實質(zhì)是利用無線電波在測向基線上形成的相位差來確定來波方向[1]。而二維干涉儀可同時對來波的方位角和俯仰角進(jìn)行測向。
干涉儀測向系統(tǒng)使用前需通過試驗驗證和通道間相位差標(biāo)校,在測試試驗過程中,如果忽略試驗條件近場特性而使相位標(biāo)校引入較大誤差,將嚴(yán)重影響測向系統(tǒng)應(yīng)用時測向的正確性。
1 二維單基線測向原理
如圖1所示的三元陣,陣元0,1的連接線與陣元0,2的連接線垂直,建立圖1所示的坐標(biāo)系。其中,θv為來波的俯仰角,θh為來波的方位角,d為單基線長度。
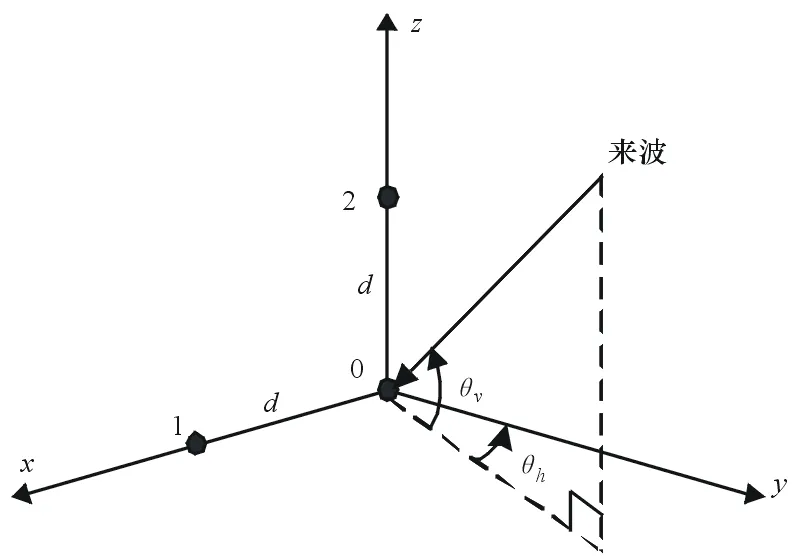
圖1 二維單基線原理說明圖
俯仰角和方位角的計算公式如下:

(1)

(2)
式中:φx為0,1基線相位差;φz為0,2基線相位差。
二維多基線干涉儀測向是利用多基線解模糊得到單基線相位差后經(jīng)過式(1)、式(2)計算得到測向結(jié)果,多基線解模糊算法比較復(fù)雜,本文不再贅述。
2 近場試驗條件下測向誤差原因分析
2.1 天線陣安裝位置偏心
測向系統(tǒng)試驗時,是將接收天線陣安裝在二維測試轉(zhuǎn)臺上,使用固定模擬目標(biāo)向天線陣發(fā)射信號,以驗證測向的準(zhǔn)確性[2]。很多情況下,由于天線結(jié)構(gòu)和測試轉(zhuǎn)臺結(jié)構(gòu)的限制,天線陣安裝位置會偏離二維測試轉(zhuǎn)臺的中心,使得同一目標(biāo)對于二者有不同的方向,此時用測試轉(zhuǎn)臺旋轉(zhuǎn)角度來衡量干涉儀測向結(jié)果會出現(xiàn)一定的誤差。
下面以某二維L型天線陣為例,討論天線安裝位置偏心時,測向結(jié)果的誤差。該L型天線陣在轉(zhuǎn)臺上的安裝位置如圖2所示,水平天線陣與轉(zhuǎn)臺的俯仰轉(zhuǎn)軸平行。天線陣安裝在與轉(zhuǎn)臺相交的斜面上。其中,以轉(zhuǎn)臺俯仰轉(zhuǎn)軸為x軸,水平轉(zhuǎn)軸為z軸,轉(zhuǎn)臺中心為原點O建立Oxyz坐標(biāo)系,Otxtytzt坐標(biāo)系是將Oxyz坐標(biāo)系的原點O平移到L型天線陣頂點Ot得到的,那么可以在此基礎(chǔ)上計算目標(biāo)在兩坐標(biāo)系下的俯仰角和方位角的誤差。

圖2 偏心示意圖
可以將測試時二維轉(zhuǎn)臺的旋轉(zhuǎn)看作坐標(biāo)系Oxyz的旋轉(zhuǎn)。假設(shè)有一固定輻射源A,在Oxyz坐標(biāo)系中坐標(biāo)為(x,y,z),試驗時轉(zhuǎn)臺先繞x軸順時針旋轉(zhuǎn)角度α(垂直旋轉(zhuǎn)角度),再繞z軸旋轉(zhuǎn)γ(水平旋轉(zhuǎn)角度),然后平移向量t,得到Otxtytzt坐標(biāo)系,如圖3所示。
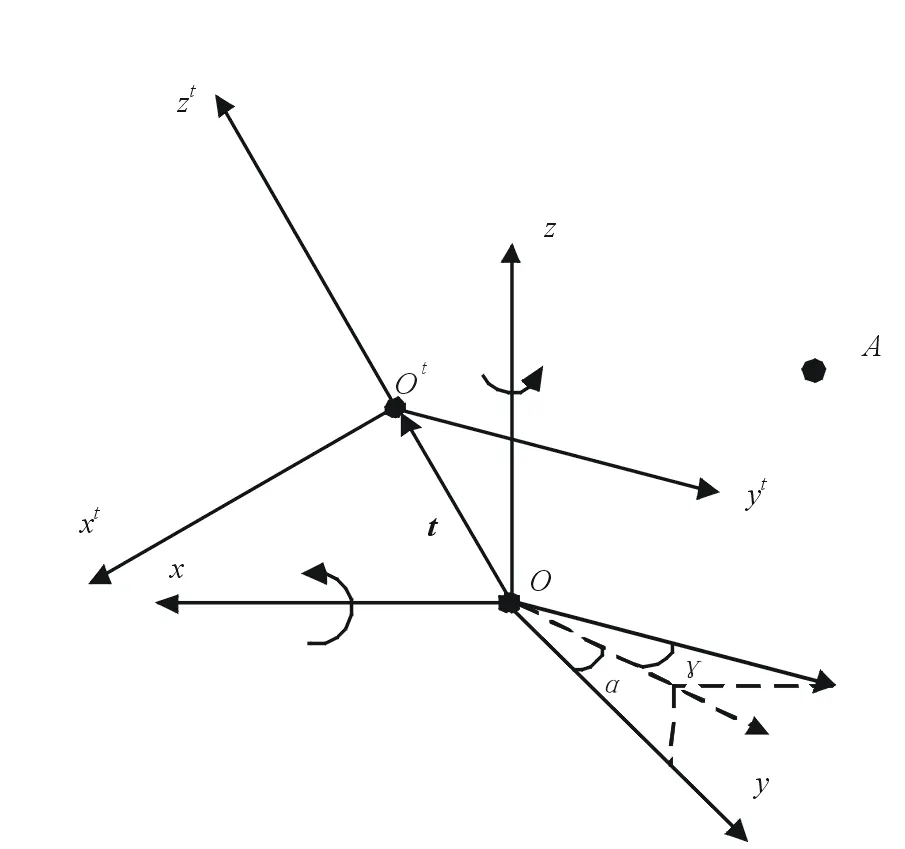
圖3 坐標(biāo)系轉(zhuǎn)換示意圖
那么,固定位置輻射源在Otxtytzt坐標(biāo)系中的坐標(biāo)(xt,yt,zt)為:
(3)
(4)
(5)
式中:Aα,Aγ分別為繞x軸旋轉(zhuǎn)角度α,繞z軸旋轉(zhuǎn)角度γ的坐標(biāo)系旋轉(zhuǎn)矩陣;t為轉(zhuǎn)臺中心到L型天線陣頂點的向量OOt。
輻射源在兩坐標(biāo)系中的俯仰角和方位角為:
θh=arctan(x/y)
(6)
θv=arcsin(z/sqrt(x2+y2+z2))
(7)
(8)

(9)

以轉(zhuǎn)臺坐標(biāo)系的測向結(jié)果作基準(zhǔn),俯仰角和方位角的誤差可以表示為:
(10)
(11)
對圖2所示的天線陣偏心所產(chǎn)生的測向誤差進(jìn)行仿真分析。假設(shè)相對于Oxyz坐標(biāo)系,L型天線陣頂點坐標(biāo)為(0.2,0.6,1.2)m,固定輻射源的初始坐標(biāo)為(0.2,0.6,ly)m。選擇ly=50,α,γ從-60°變化到60°,變化間隔為1°,仿真得到的測角誤差如圖4、圖5所示。
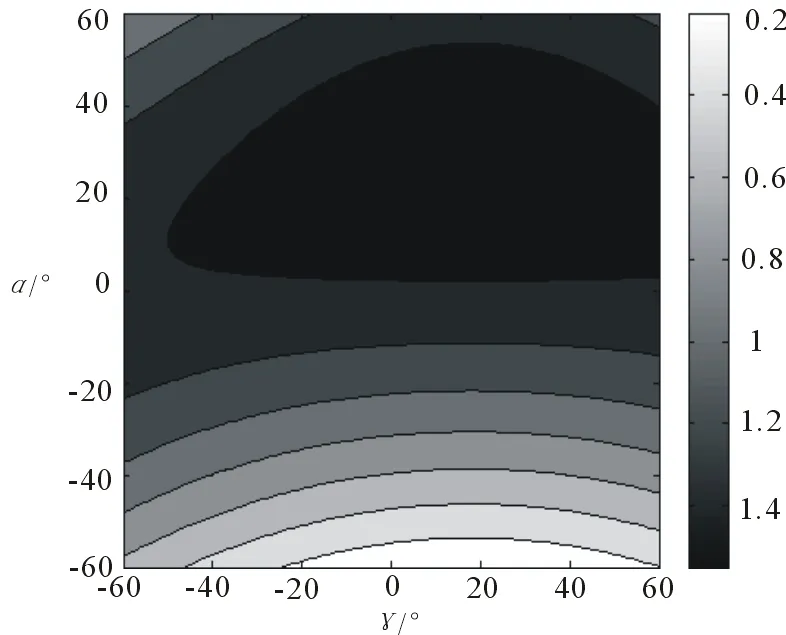
圖4 俯仰角誤差

圖5 方位角誤差
觀察俯仰角和方位角測角誤差隨轉(zhuǎn)臺的垂直旋轉(zhuǎn)角度和水平旋轉(zhuǎn)角度的變化,可以看出|e|最大值接近1.5°。圖中分層規(guī)律顯示,垂直旋轉(zhuǎn)角度主要影響俯仰角,水平旋轉(zhuǎn)角度主要影響方位角。
選擇α=18°,γ=-55°,ly從10 m增加到100 m,俯仰角和方位角的誤差如圖6所示。俯仰角和方位角的誤差隨輻射源的距離增大而減小。并且在一定范圍內(nèi),距離減小,誤差急劇增大。距離為10 m時,俯仰角誤差甚至達(dá)到7°。
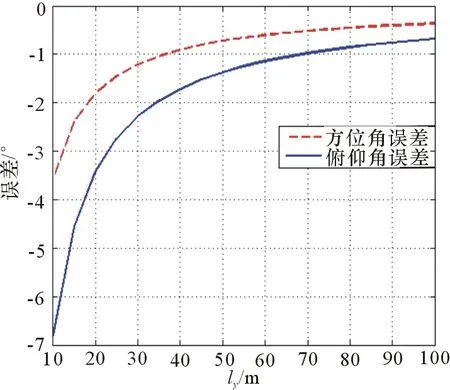
圖6 輻射源距離對俯仰角和方位角的影響
綜上分析,由于天線安裝位置的偏心,使得測向系統(tǒng)的測向結(jié)果與轉(zhuǎn)臺坐標(biāo)系的定向結(jié)果之間存在誤差。
綜合圖4、圖5、圖6,該誤差在輻射源距離50 m時還能達(dá)到接近1.5°,輻射源距離越近,誤差越大。可見在內(nèi)場試驗時,偏心對測向結(jié)果有相當(dāng)大的影響,如果不對偏心的影響進(jìn)行分析和校正,簡單地以轉(zhuǎn)臺旋轉(zhuǎn)角度衡量測向結(jié)果,會嚴(yán)重影響對測向系統(tǒng)的試驗驗證。
2.2 近場電磁波球面?zhèn)鞑サ挠绊?/p>
由輻射源發(fā)出的電波是球面波,到接收天線的距離很大(與波長相比)時,可以近似認(rèn)為平面波[3],干涉儀測向系統(tǒng)是在這一理論基礎(chǔ)上建立的。但試驗場受空間限制,輻射源距離一般不滿足近似平面波條件。
以一維單基線兩陣元為例,說明電磁波的球面?zhèn)鞑ツJ较玛囋g相位差與近似平面波傳播時相位差的計算方式不同,如圖7所示,O為輻射源,A、B為接收陣元。
圖7 一維單基線測向說明圖
輻射源距離遠(yuǎn)大于陣元間距d時,電磁波近似為平面波傳播,A,B接收到的信號波達(dá)角近似相同(如圖7虛線所示),波達(dá)角為θ,波程差為dsinθ,相位差φ為:
(12)
而球面波傳播時,波程差為OA-OB(如圖7實線所示),相位差φ為:
(13)
干涉儀測向系統(tǒng)是在式(12)的基礎(chǔ)上計算波達(dá)角的。但是近場試驗時,實際相位差的理論值為式(13)的結(jié)果,最終造成測向誤差。
仍以圖2所示的天線陣為例,采用適當(dāng)?shù)幕€比可得到各接收陣元的坐標(biāo),通過式(13)計算出陣元間相位差,經(jīng)過適當(dāng)?shù)慕饽:惴ǎ瑥亩M出干涉儀測向系統(tǒng)的測角結(jié)果,與通過坐標(biāo)計算得到的方位角和俯仰角的精確結(jié)果進(jìn)行對比分析。因為考慮的是測向系統(tǒng)本身的測向誤差,所以僅在Otxtytzt坐標(biāo)系下分析。俯仰角和方位角的測角誤差為:
(14)
(15)
式中:θhc,θvc為干涉儀測向系統(tǒng)得到的方位角和俯仰角。
固定輻射源的初始坐標(biāo)為(0,0,ly)。ly分別選20,35,50,α,γ從-60°變化到60°,變化間隔為1°。仿真的結(jié)果如圖8、圖9所示。
圖8 俯仰角測角誤差

圖9 方位角測角誤差
從圖中可以看出,輻射源的距離和轉(zhuǎn)臺的旋轉(zhuǎn)角度,都對測角誤差有影響。方位角測角誤差受距離影響較大,而俯仰角誤差也受距離影響,兩者都隨著距離的增大而減小。
為了進(jìn)一步分析這3個因素的影響,以方位角誤差為例,轉(zhuǎn)臺旋轉(zhuǎn)角度選取(45°,45°)和(60°,60°),得到圖10。
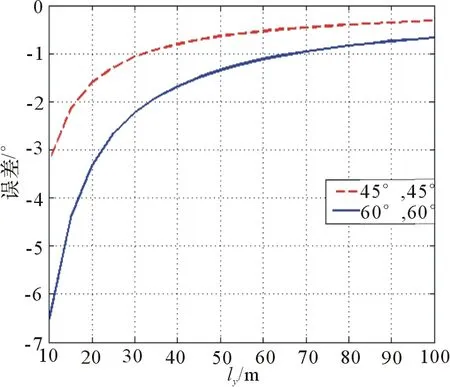
圖10 球面?zhèn)鞑ゾ嚯x的影響
圖10顯示,距離對測角結(jié)果影響很大。(45°,45°)的情況,距離近時,誤差可以達(dá)到3°;距離增大到60 m,誤差才減小到0.5°以內(nèi)。由圖9也可以看出,仿真選取的轉(zhuǎn)臺旋轉(zhuǎn)角度(45°,45°)并不是最惡劣的情況,若是旋轉(zhuǎn)角度選取更惡劣的情況,會造成同一距離產(chǎn)生的誤差相對增大,如圖10中實線所示。
旋轉(zhuǎn)角度選擇(45°,45°),相位噪聲服從均值為0、方差為0.05×2π的正態(tài)分布,采樣間隔為1 s,觀測10 s,仿真得到方位角誤差,并用圖10中的結(jié)果對其進(jìn)行校正,結(jié)果如圖11所示。
在電磁波實際以球面?zhèn)鞑r,不論是距離還是轉(zhuǎn)臺旋轉(zhuǎn)角度,都對測向結(jié)果產(chǎn)生較大的誤差,這種影響是不能忽略的,如果沒有考慮到近場球面?zhèn)鞑r的這類誤差,也會對測向系統(tǒng)的試驗驗證造成嚴(yán)重影響。
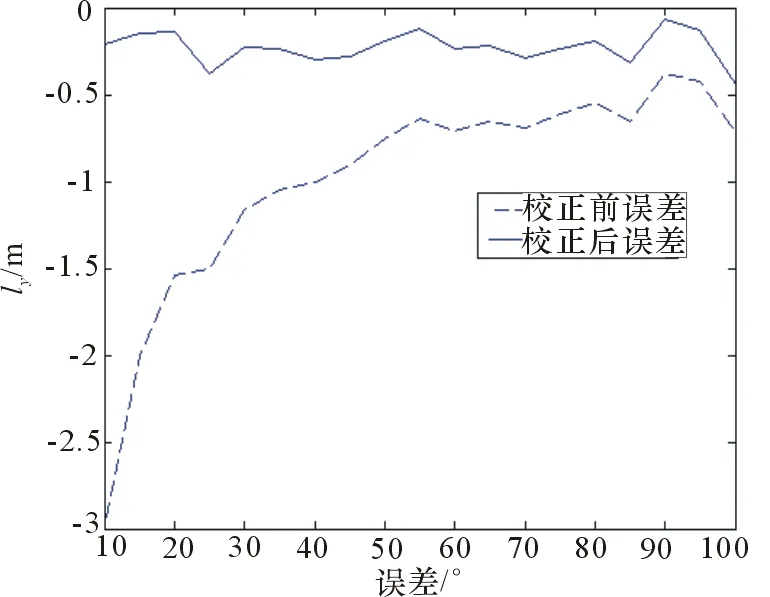
圖11 方位角誤差校正結(jié)果
3 結(jié)束語
干涉儀測向系統(tǒng)產(chǎn)生誤差的原因有很多[4],本文僅分析了由于試驗時的近場條件,二維干涉儀測向系統(tǒng)產(chǎn)生測向誤差的相關(guān)因素,仿真了產(chǎn)生的測角誤差,得出以下結(jié)論:
(1) 天線安裝位置偏心會使干涉儀測向結(jié)果與轉(zhuǎn)臺旋轉(zhuǎn)結(jié)果產(chǎn)生較大偏差,在試驗時可利用式(10)、式(11)進(jìn)行校正。
(2) 試驗不滿足遠(yuǎn)場條件,會使干涉儀測向系統(tǒng)本身的測角結(jié)果產(chǎn)生很大誤差,可盡可能地增大輻射源的距離、減小轉(zhuǎn)臺旋轉(zhuǎn)范圍來減小誤差。
(3) 受試驗場空間限制,輻射源距離無法增大時,可以對不同距離、不同轉(zhuǎn)臺旋轉(zhuǎn)角度的測角誤差進(jìn)行仿真計算,形成完備的測角誤差數(shù)據(jù)庫,對干涉儀測向結(jié)果進(jìn)行校正,此方法有待于進(jìn)一步仿真驗證。
[1] 肖秀麗.干涉儀測向原理[J].中國無線電,2006(5):43-49.
[2] 王晨晨,房景仕.二維測試轉(zhuǎn)臺偏心誤差修正技術(shù)研究[J].自動化與信息工程,2013,34(4):11-15.
[3] 薛建彬.現(xiàn)代通信技術(shù)[M].北京:北京理工大學(xué)出版社,2013.
[4] 張娟,劉恒,何冠良.干涉儀測向系統(tǒng)相位誤差校準(zhǔn)方法[J].雷達(dá)與對抗,2014,34(3):23-26.
InfluenceofNear-fieldTestConditionsonTwo-dimensionalInterferometerDirection-findingSystem
LI Lin,JU Yi
(The 723 Institute of CSIC,Yangzhou 225001,China)
Based on the principle of interferometer direction-finding,this paper analyzes two reasons of measurement error when the interferometer direction-finding system is in near-field test,simulates the impact of emitter distance and rotation angle of the turntable on 2D interferometer direction-finding results under the two conditions,educes the direction-finding error correction formula when the antenna position is off-center,proposes the method using the simulation result to compensate the angle measurement error caused by the spherical propagation in tests.
interferometer direction-finding;error;off-center;spherical propagation
TN971
A
CN32-1413(2017)05-0044-04
10.16426/j.cnki.jcdzdk.2017.05.009
2017-09-06
