一種電力信息通信機房智能巡檢機器人設計與應用
2017-11-17 02:14:25楊連營汪文杰陳秀國
微處理機 2017年5期
楊連營,楊 亞,汪文杰,陳秀國
(國網銅陵供電公司,銅陵244000)
一種電力信息通信機房智能巡檢機器人設計與應用
楊連營,楊 亞,汪文杰,陳秀國
(國網銅陵供電公司,銅陵244000)
目前,電力信息通信整體呈現開放、泛在、智能、互動、可信特征,全面支撐智能電網能源與信息的交互,隨著供電優質服務建設和農配網升級改造的持續推進,國家電網公司對電力信息通信機房管理的覆蓋面、集成度、實時性、安全性提出了更高的要求,傳統的人工巡檢方式已經無法滿足電力信息通信機房的安全保障需求。為了克服電力信息通信機房傳統人工巡檢方式耗時費力、存在巡視盲區、不具實時性等問題,通過對機器人平臺、軌道敷設、功能單元、輔助單元的實驗方案進行對比,設計了一種智能巡檢機器人,現場驗證證實該智能巡檢機器人能夠代替人工巡檢,具有顯著的經濟和社會效益,具備推廣價值。
電力信息通信機房;智能巡檢機器人;人工巡檢
1 引言
目前,電力信息通信整體呈現開放、泛在、智能、互動、可信等特征,全面支撐智能電網能源與信息的交互,由電網業務的支撐平臺轉變為支撐電網、電源、負荷、客戶之間交互的綜合服務平臺,成為智能電網支撐全球能源互聯網的基礎載體[1-4]。電力信息通信機房承載著電力營銷、調度、運行、檢修等重要業務,是電網企業的關鍵性基礎設施。
然而,電力信息通信機房的傳統巡檢采用人工方式,該種巡檢方式存在以下弊端:
(1)巡檢耗時費力。每座機房每次安排兩人巡視,巡檢周期為1-3次/天,巡視時間15min/次,由于電力信息通信機房分布不集中,巡檢人員開展巡視工作須在各機房之間反復折返,耗費大量人力物力。
(2)存在巡視盲區。機房內部署了大量電力信息交換與安全控制設備,人工巡視無法全面覆蓋。
(3)不具有實時性。機房內的環境參數無法第一時間反饋給運行維護人員,一旦溫濕度長時間超標,將會出現設備斷電、空調停機、機房漏水等情況,對機房安全造成極大隱患,甚至影響電網運行安全。
為了縮短人工巡檢時間,提高巡檢工作效率,在借鑒軌道智能巡檢機器人的基礎上,針對電力信息通信機房的特點,研制了一種電力信息通信機房的智能巡檢機器人。
2 智能巡檢機器人的設計思路
2.1 設計思路
一種電力信息通信機房智能巡檢機器人具備以下主要功能[5-8]:
(1)行駛功能:機器人本體能夠在機房內平穩行駛,在接受控制平臺直行、轉彎、變速、停止命令時,偏移角度小于8°;具有循跡避障能力,在巡檢過程中,能自動感知并躲避障礙物。
(2)溫濕度監測功能:通過在機器人本體上安裝溫濕度傳感器,實現對機房內溫濕度的精確采集、實時監測預警及回溯分析。
(3)視頻采集傳輸功能:通過在機器人本體安裝攝像頭并設計視頻采集傳輸模式,對機房態勢進行實時監控。
(4)巡檢時間:在實現以上功能的基礎上,智能機器人巡檢時間優于人工巡檢。
2.2 方案設計框圖
根據機器人設計思路,畫出方案框圖,如圖1。

圖1 :電力信息通信機房智能巡檢機器人方案框圖
3 方案驗證
根據電力信息通信機房的巡檢要求,對機器人各模塊進行設計并驗證。
(1)平臺設計方案
電力信息通信機房環境簡單,故選擇三種靈巧輕便的機器人作為搭載巡檢設備的平臺,分別是多足機器人、履帶式機器人、四輪車機器人。如圖2所示。

圖2 :三種機器人
通過在機器人底部安裝二極管,感應軌道軌跡,保障平穩運行,并以三種機器人運行時的偏移角度為目標,考察機器人的運行平穩度。
實驗方法:分別將多足機器人、履帶式機器人、四輪車機器人放置在預設軌道上運行,測量機器人在軌道上運行的偏移角度,實驗次數為10次。實驗結果見表1。
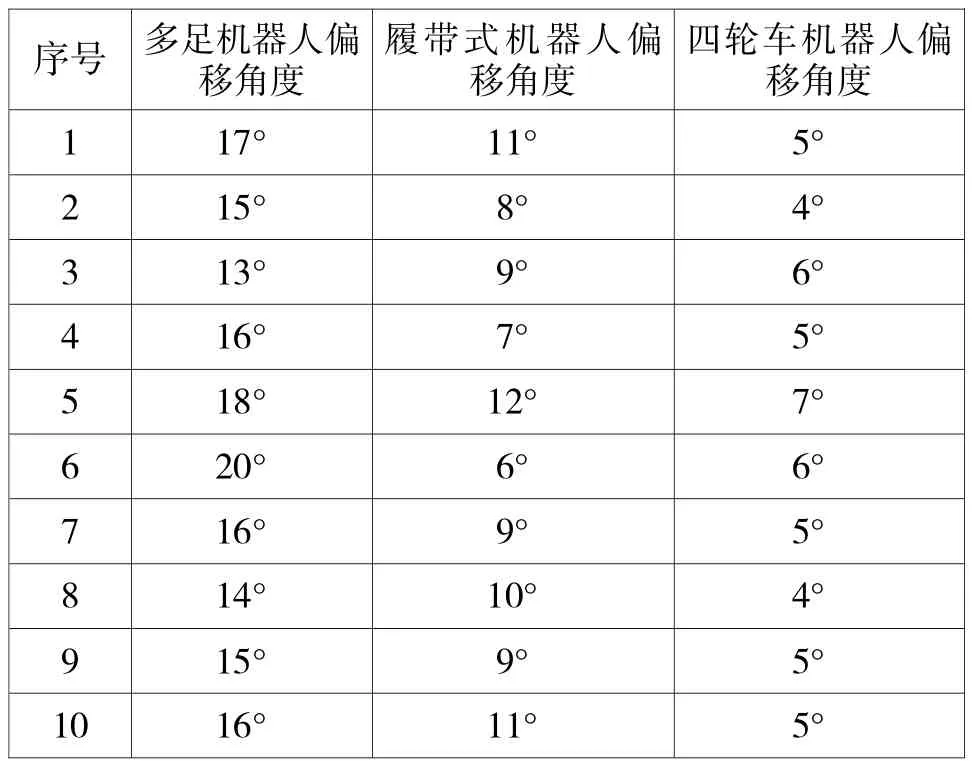
表1 三種機器人偏移角度實驗數據
從實驗數據分析得知,多足機器人運行時角度偏移最大,履帶式機器人運行時偏移角度較大,四輪車機器人運行角度偏移量最小,符合電力信息通信機房敷設軌道上機器人的運行要求。
(2)軌道敷設方案
為機器人敷設特定的巡檢路線,并使其在預設軌道上平穩運行,采用紅外探測法來尋找機器人的運行軌跡——“黑線”。即紅外線在不同顏色的物理表面具有不同的反射性質的特點,在機器人行駛過程中不斷地向地面發射紅外光,當紅外光遇到地面時發生漫發射,反射光被裝在機器人上的接收管接收;如果遇到黑線則紅外光被吸收,則小車上的接收管接收不到信號。因此,軌道敷設材料均采用黑色的材質。在軌道材質選擇上考慮黑色瓷磚、黑色涂料、黑色膠帶。
實驗方法:采用多組對比實驗,在實驗室分別用黑色瓷磚、黑色涂料、黑色膠帶敷設了4m×4m、4m×5m、5m×5m的三個實驗軌道。
考察指標:統計機器人單圈運行所需時間、是否發生停止不前現象、識別異常障礙物的速度以及敷設軌道所需總價。實驗結果見表2。
從實驗數據分析得知,機器人巡檢時間隨著軌道的長度增長而增加,選用敷設黑色膠帶的成本最低,效果最好。
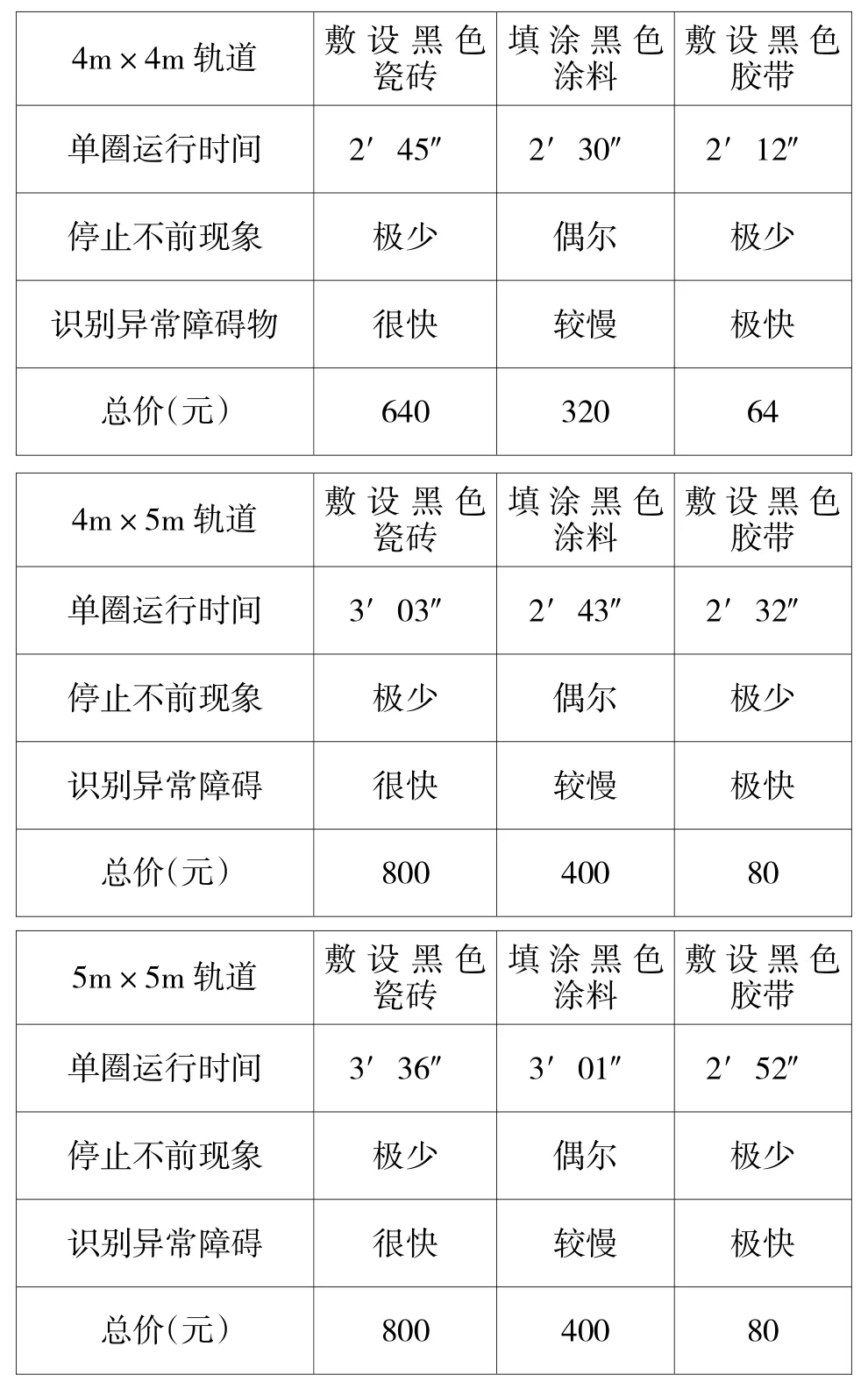
表2 三種軌道敷設方案對比
(3)功能單元方案
(a)溫濕度監測方案
對溫濕度監測傳感器的選擇主要在于它的溫濕度監測精度和響應時間。對兩種傳感器進行溫濕度的監測試驗,在特定的電力信息通信機房(網絡機房),先后選用DTH11傳感器和AM2302傳感器進行溫濕度監測對比試驗。實驗結果如表3所示。
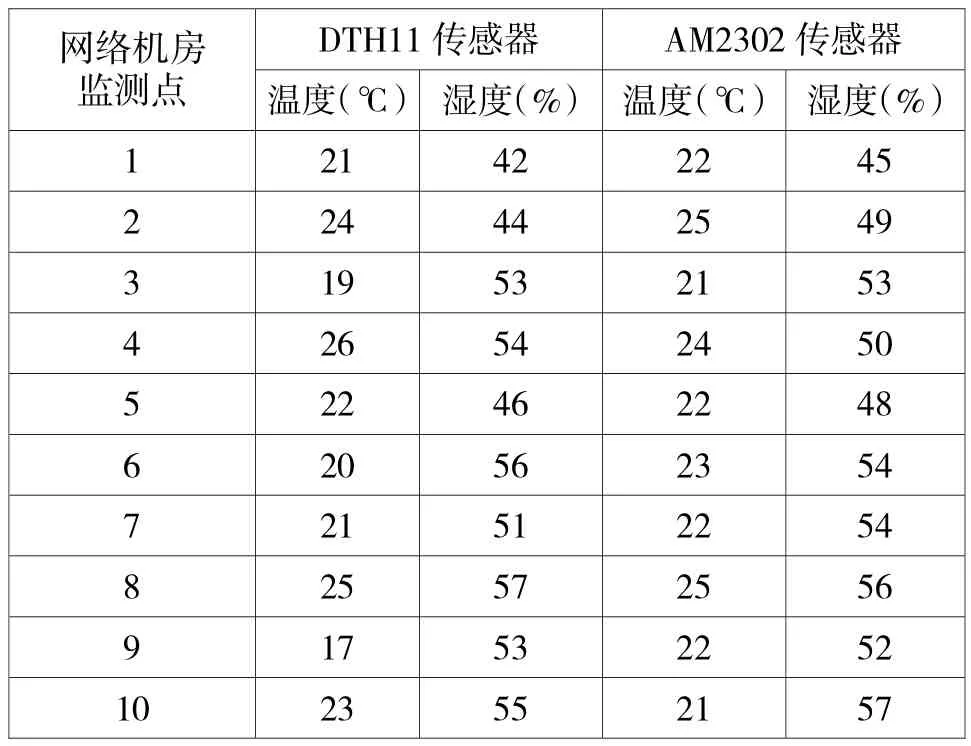
表3 兩種傳感器監測數據
從實驗結果可以看出,DTH11傳感器溫濕度監測精度較差,AM2302傳感器溫濕度監測效果良好,適用于智能巡檢機器人。
(b)視頻采集傳輸方案
當巡檢機器人移動時需要對視頻、聲音等信息進行實時傳輸,通過在規定的時間和區域范圍內,考察高清采集有線傳輸與高清采集無線傳輸兩種方式視頻采集范圍與傳輸能力。結果如表4所示。
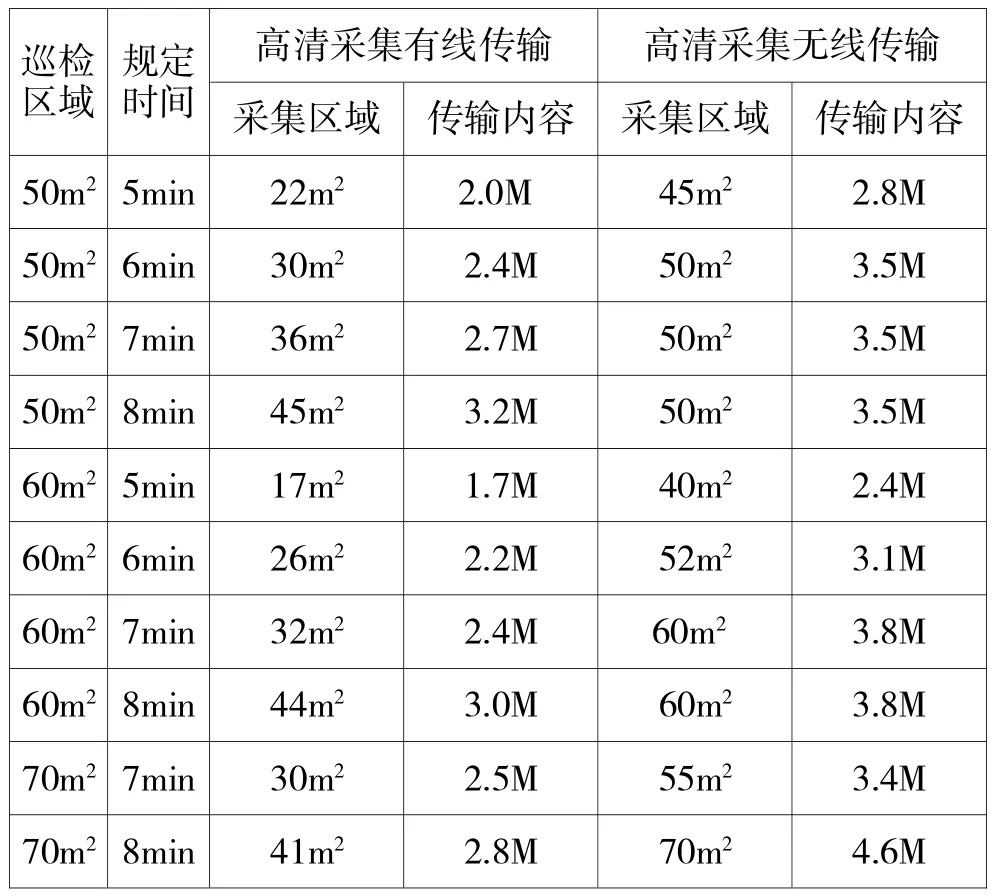
表4 兩種方式采集傳輸能力對比
從表中可以看出,高清采集有線傳輸因受巡檢移動時傳輸線的影響采集區域較小、傳輸能力較弱,而高清采集WIFI傳輸移動靈活,在規定時間內,采集區域較大、傳輸能力強。
(4)輔助單元方案
(a)循跡避障方案
機器人在預設軌道上做巡檢任務時,須對途中障礙物進行躲避以保障巡檢順利進行,文中對電磁循跡和紅外循跡兩種方式進行實驗分析,具體通過統計機器人單圈運行過程中能夠規避的障礙物個數(總數10個)及時間測試兩種方式的避障能力進行優選。
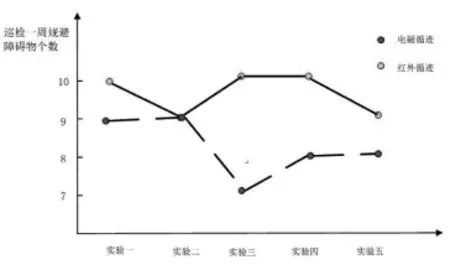
圖3 兩種循跡方式避障能力對比
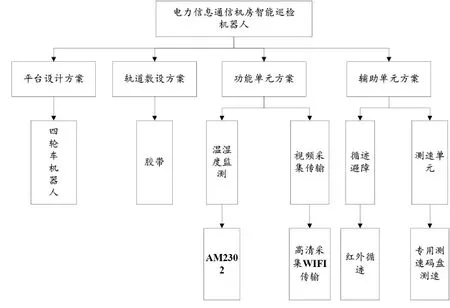
圖4 最佳方案框圖
實驗結果如圖3所示,可見,使用紅外循跡法能夠有效地規避障礙物。
(b)測速單元方案
測速單元能夠根據巡檢需要進行勻速移動、變速移動、特殊區域定位精細巡檢,保證機器人不會因速度變化而發生翻車、嚴重抖動等情況,對紅外測速和專用測速碼盤兩種方式進行比較分析,實驗結果見表5。
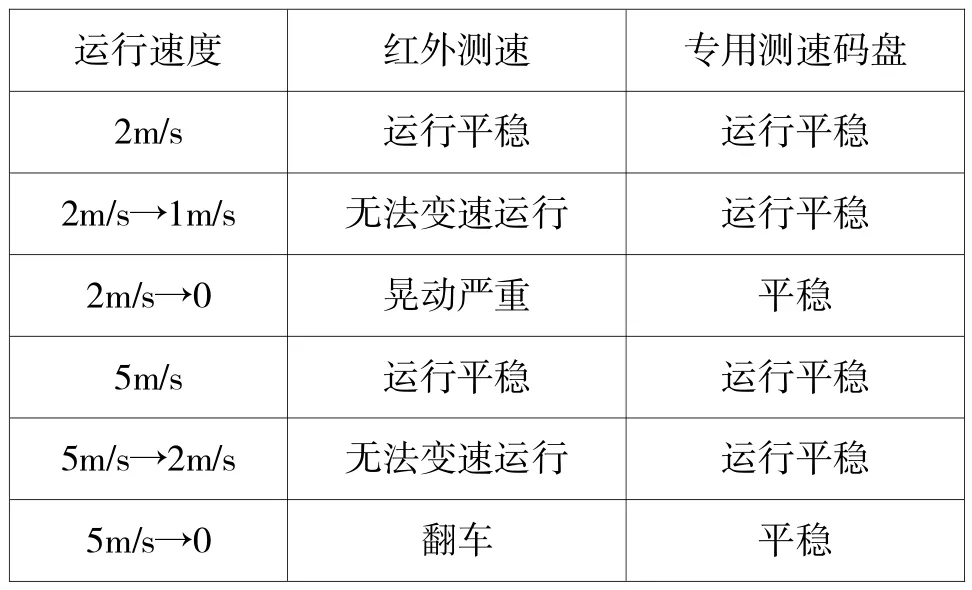
表5 兩種測速方案對比
從實驗結果可以看出,紅外測速無法實現變速運行,當執行定位操作時,即將速度變為0時,機器人有翻車情況出現;專用測速碼盤能夠實現變速運行,當執行定位操作時,即將速度變為0時,機器人平穩,適用于機房智能巡檢機器人。
根據對四個模塊的設計和實驗,選出最佳方案,如圖4所示。
圖5 智能巡檢機器人現場應用圖片
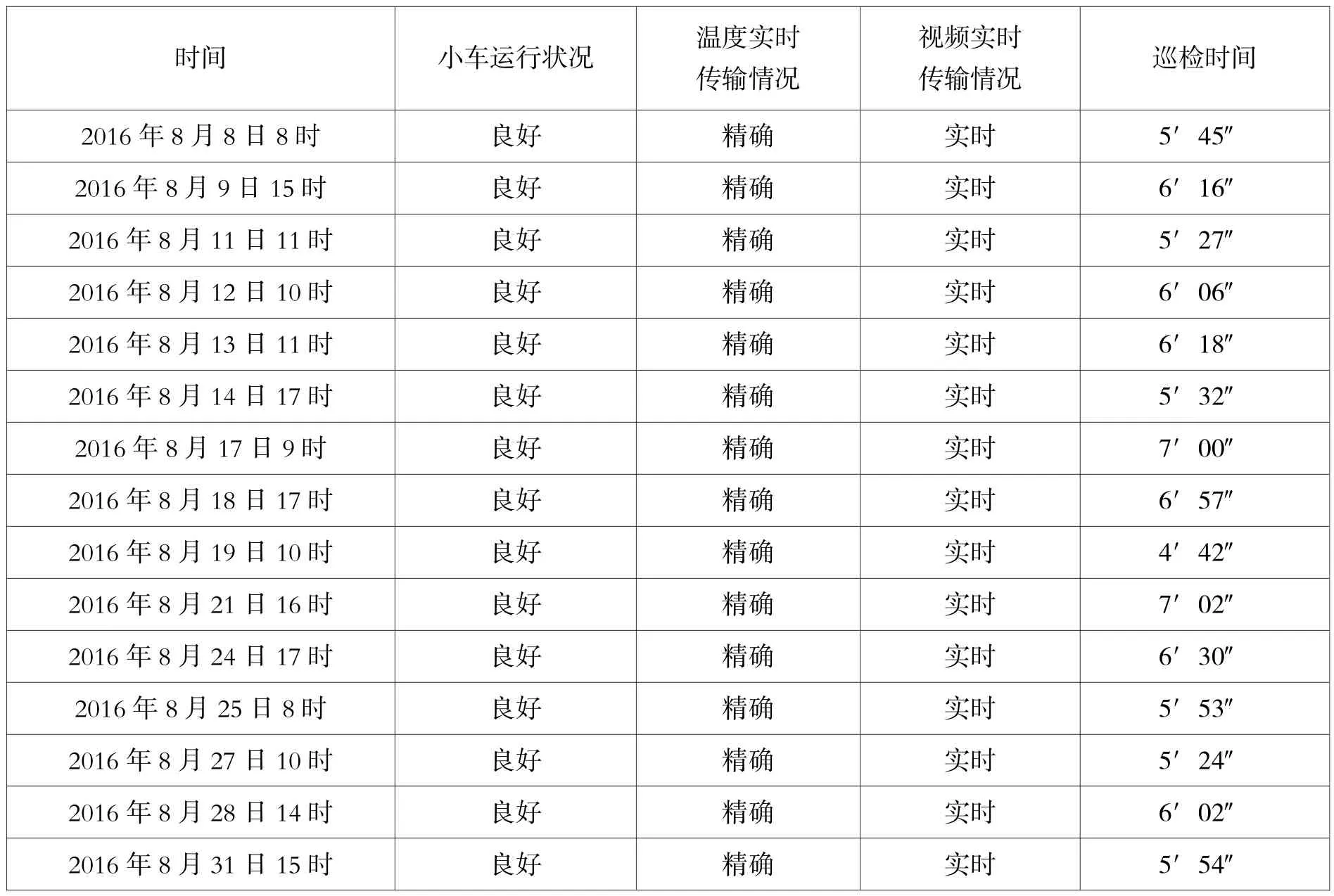
表6 現場驗證對比結果
4 現場示范應用
對智能巡檢機器人的各單元模塊進行硬件組裝,并對開發的智能巡檢軟件進行調試,最后進行現場驗證。
為實現現場驗證,從銅陵供電公司在運的信息通信機房中隨機選取3個機房進行了為期15天的跟蹤測試,運行結果如表6所示。
經過檢查,機房智能巡檢機器人巡檢溫濕度精度高,巡檢時間在7′02″以內,大大提升了人工巡檢的效率和精度。
5 結束語
針對目前電力系統通信機房人工巡檢耗時費力、存在巡視盲區、無法實時監測的問題,設計了一種電力信息通信智能巡檢機器人,以機器人巡視代替傳統人工巡檢,實現了對機房環境的實時精確監測,并且大大降低了巡檢時間。隨著電網規模逐年擴大,信息化程度的逐步加深,精細化管理要求的不斷提高,相信智能巡檢機器人將具有更好的應用前景。
[1]李向東,魯守銀,王宏等.一種智能巡檢機器人的體系結構分析與設計[J].機器人,2005,27(6):502-506.Li Xiangdong,Lu Shouyin,Wang Hong.Design and Analysis on the Architecture of an Intelligent Iterative Inspection Robot[J].Robit,2005,27(6):502-506.
[2]陳凌峰,初艷華.智能巡檢機器人測溫應用及案例[J].電子測試,2016,(23):29,25.Chen Lingfeng,Chu Yanhua.Application and Case of Temperature Measuring Using Intelligent Patrol Robot[J].Electronic Test,2016,(23):29,25.
[3]Sawada J,Kusumoto K,Munakata T.A mobile robot for inspection of power transmissions lines[J].IEEE Transactions on Power Delivery,1991,6(1):309-315.
[4]Pouliot N,Montambault S.Field-oriented developments for LineScout Technology and its deployment on large water crossing transmission lines[J].Journal of Field Robotics,2012,29(1):25-46.
[5]肖鵬,欒貽青,郭銳等.變電站智能巡檢機器人激光導航系統研究[J].自動化與儀表,2012,27(5):5-9.Xiao Peng,Luan Yiqing,Guo Rui.Research of the Laser Navigation System for the Intelligent Patrol Robot[J].Automation and Instrumentation,2012,27(5):5-9.
[6]高旻龍.智能巡檢機器人在變電站中的應用[J].價值工程,2015,(11):254-255.Gao Minlong.Application of Intelligent Inspection Robot in Substation[J].Value Engineering,2015,(11):254-255.
[7]H.Kobayashi,H.Nakamura,and T.Shimada.An Inspection Robot for Feeder Cables Basic Structure and Control[C].Iecon 1991.992-995.
[8]周盼,張蕾.基于Android平臺的變電站智能巡檢系統[J].計算機測量與控制,2015,23(9):3073-3076.Zhou Pan,Zhang Lei.An Android Platform Based Information Acquisition System for Transformer Stations[J].Computer Measurement and Control,2015,23(9):3073-3076.
Design and Application of an Intelligent Inspection Robot for Information and Communication Room
Yang Lianying,Yang Ya,Wang Wenjie,Chen Xiuguo
(State Grid Tongling Electric Power Supply Company,Tongling 244000,China)
At present,electric power information communication presents new characteristics such as open,ubiquitous,smart,interactive and credible,which fully support the interaction between smart grid energy and information.With continuous progress of the power supply quality service construction and village distribution network upgrading and reconstruction,state grid corporation puts forward higher requirement to the electric power information communication computer room management,such as integration,real-time and security.Traditional way of manual inspection has been unable to meet the demand of electric power information security of communication computer room.In order to overcome the problem of manual inspection for information and communication room,such as time-consuming,laborious,weak real-time,and it exists many blind spots of supervision,compares the experiment programs of robot platform,track laying,fuctional units and auxiliary units,designs an Intelligent Iterative Inspection Robot,site verification proves that the intelligent inspection can replace manual inspection,it has a significantly economic and social benefits,also with promotional value.
Information and communication room;Intelligent inspection robot;Manual inspection
10.3969/j.issn.1002-2279.2017.05.023
TP391
A
1002-2279-(2017)05-0089-06
楊連營(1966-),男,安徽六安人,高級工程師,主研方向:智能信息處理理論與技術。
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
中華手工(2017年2期)2017-06-06 23:00:31
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
中外會展(2014年4期)2014-11-27 07:46:46