水平軸潮流能發(fā)電裝置控制流程設(shè)計(jì)
2017-11-17 01:16:16王兵振
海洋技術(shù)學(xué)報(bào) 2017年5期
關(guān)鍵詞:發(fā)電機(jī)
王兵振 ,郭 毅,張 巍,武 賀
(國家海洋技術(shù)中心,天津 300112)
水平軸潮流能發(fā)電裝置控制流程設(shè)計(jì)
王兵振 ,郭 毅,張 巍,武 賀
(國家海洋技術(shù)中心,天津 300112)
以正在研制的水平軸潮流能發(fā)電裝置為對象,開展了工作流程控制方法的研究工作。建立了基于葉素-動(dòng)量理論的動(dòng)力特性仿真模型;利用仿真模型考察了發(fā)電裝置的啟動(dòng)轉(zhuǎn)矩和轉(zhuǎn)速特性,以及流速大于額定流速條件下的功率限定問題,制定了基于發(fā)電機(jī)輸出電壓的啟動(dòng)控制策略和基于發(fā)電機(jī)輸出功率的功率限定控制策略。根據(jù)控制策略,設(shè)計(jì)了裝置的控制流程。結(jié)合潮流變化情況,對控制流程進(jìn)行了仿真。仿真結(jié)果表明,基于發(fā)電機(jī)輸出電力參數(shù)的控制流程能夠較好地實(shí)現(xiàn)對發(fā)電裝置的控制。
潮流能;發(fā)電;控制流程;仿真
潮流發(fā)電技術(shù)是近年來國內(nèi)外海洋能研究領(lǐng)域的一個(gè)熱點(diǎn)。在國外,英國研制的水平軸潮流發(fā)電機(jī)組SeaGen具有代表性意義,隨后許多研究機(jī)構(gòu)開展了商業(yè)級(jí)潮流發(fā)電裝置的研發(fā)工作[1]。在國家海洋局的支持下,國內(nèi)許多科研單位也對潮流發(fā)電技術(shù)開展了大量的研究,研制了多個(gè)海上試驗(yàn)樣機(jī),并進(jìn)行了實(shí)海況試驗(yàn)[2-3]。
海洋潮流流速近似按正弦規(guī)律變化,樣機(jī)的工作需要結(jié)合潮流變化規(guī)律。當(dāng)流速增大至啟動(dòng)流速后,潮流發(fā)電機(jī)組開始發(fā)電工作,機(jī)組輸出功率隨流速的大小和方向的改變而改變。雖然按潮流流速和方向來控制潮流機(jī)組工作是較為理想的選擇,但這種方案也存在一定的局限性。目前,精度較高的全深度、多剖面流速測量方法為座底式測量方法,這種方法成本高,且測量設(shè)備一般為自容式儀器,與潮流機(jī)組控制系統(tǒng)的整合非常復(fù)雜,對系統(tǒng)的可靠性不利,難以適用于中小型潮流發(fā)電機(jī)組。另外,潮流能發(fā)電技術(shù)采用浮式或樁基固定平臺(tái),在固定平臺(tái)上可安裝單點(diǎn)或剖面測流設(shè)備,雖然這種方法與機(jī)組控制系統(tǒng)的整合較為簡單,但測量點(diǎn)流速受到葉輪和平臺(tái)影響,存在著流速的測量結(jié)果難以準(zhǔn)確反映葉輪前方來流情況的問題。目前,國內(nèi)針對水平軸潮流能發(fā)電裝置的控制方法的研究相對較少,主要集中在變槳機(jī)構(gòu)、電力系統(tǒng)的最大功率跟蹤等方面[4-6],但上述研究未與潮流的變化相結(jié)合,與之有關(guān)的控制流程的研究還未見報(bào)道。
采用發(fā)電機(jī)輸出電力參量來控制機(jī)組工作的方法相對較為簡單,可以避免實(shí)時(shí)測量流速所引起的問題。以正在研制的150 kW水平軸潮流發(fā)電機(jī)組為對象,結(jié)合潮流變化特性,開展了基于發(fā)電機(jī)輸出電力參數(shù)的控制策略的研究工作。通過研究,設(shè)計(jì)了控制流程,并對控制流程進(jìn)行了仿真分析。
1 潮流發(fā)電裝置
1.1 發(fā)電系統(tǒng)
研制的潮流能發(fā)電裝置為一臺(tái)2葉片水平軸潮流發(fā)電裝置,額定工作流速為2.15 m/s,最大工作流速2.5 m/s。發(fā)電裝置包括機(jī)械系統(tǒng)、電力系統(tǒng)和控制系統(tǒng)3部分。裝置的機(jī)械系統(tǒng)包括葉輪、傳動(dòng)和發(fā)電機(jī)等部分。葉輪直徑為10 m,設(shè)計(jì)最佳尖速比為6.5,額定轉(zhuǎn)速為24.637 r/min;輪轂直接與傳動(dòng)系統(tǒng)低速軸端部的法蘭連接。傳動(dòng)系統(tǒng)采用增速傳動(dòng)技術(shù)方案,增速比為60.884;增速器采用行星增速的形式,傳動(dòng)鏈為2級(jí)2K-H行星齒輪傳動(dòng)加一級(jí)平行軸斜齒輪傳動(dòng)。發(fā)電機(jī)采用永磁交流發(fā)電機(jī),額定功率為150 kW,額定轉(zhuǎn)速為1 500 r/min,額定電壓690 V。發(fā)電機(jī)與傳動(dòng)系統(tǒng)輸出軸之間通過彈性聯(lián)軸器連接。發(fā)電裝置組成結(jié)構(gòu)如圖1所示。
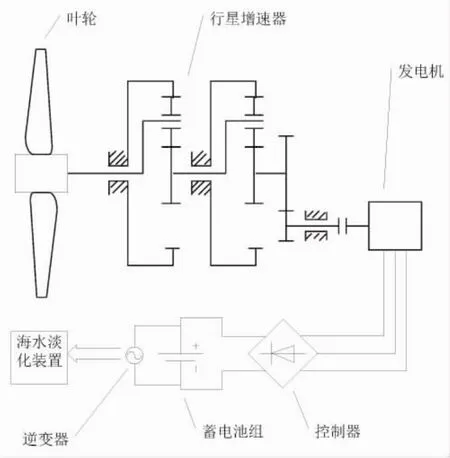
圖1 潮流發(fā)電樣機(jī)機(jī)械和電力系統(tǒng)
研制的水平軸潮流發(fā)電裝置采用變槳控制技術(shù)方案,利用改變?nèi)~片槳距角的方式來控制裝置的啟動(dòng)、輸出功率限定和極限工況保護(hù)等功能。
發(fā)電裝置為獨(dú)立供電裝置,為一套日產(chǎn)水500 t的海水淡化裝置提供補(bǔ)充性電力能源。電力系統(tǒng)包括控制器、電池組和逆變器等3部分。控制器將發(fā)電機(jī)輸出的交流電轉(zhuǎn)換為直流電,并進(jìn)行斬波升壓處理;充電電路對蓄電池組充電。蓄電池組為蓄能器件,并為逆變器提供直流電。逆變器將直流電轉(zhuǎn)換為交流電,供海水淡化裝置使用。
1.2 控制系統(tǒng)構(gòu)成
樣機(jī)的控制系統(tǒng)分2個(gè)部分:變槳測控系統(tǒng)和主測控系統(tǒng)。其中,變槳測控系統(tǒng)位于輪轂內(nèi)部,主要用于控制葉片的槳距角位置;主測控系統(tǒng)位于浮式測試平臺(tái)上,主要用于對整個(gè)發(fā)電樣機(jī)進(jìn)行監(jiān)測和控制。控制系統(tǒng)的原理組成如圖2所示。
變槳控制系統(tǒng)主要由1個(gè)可編程控制器(2號(hào)PLC)、變槳電機(jī)驅(qū)動(dòng)路、槳距角位置傳感器等部分組成。當(dāng)需要進(jìn)行變槳調(diào)整時(shí),主控制器(1號(hào)PLC)向變槳控制器發(fā)送變槳控制信息,變槳控制器控制變槳電機(jī)完成槳距角調(diào)整任務(wù)。變槳驅(qū)動(dòng)電機(jī)為XLE-8145A擺線針輪減速電機(jī),其額定轉(zhuǎn)速為0.29 r/min,電機(jī)為直流電機(jī)。葉片的槳距角位置通過絕對位置傳感器測量,測量結(jié)果反饋給變槳控制器,形成一個(gè)閉環(huán)控制回路。
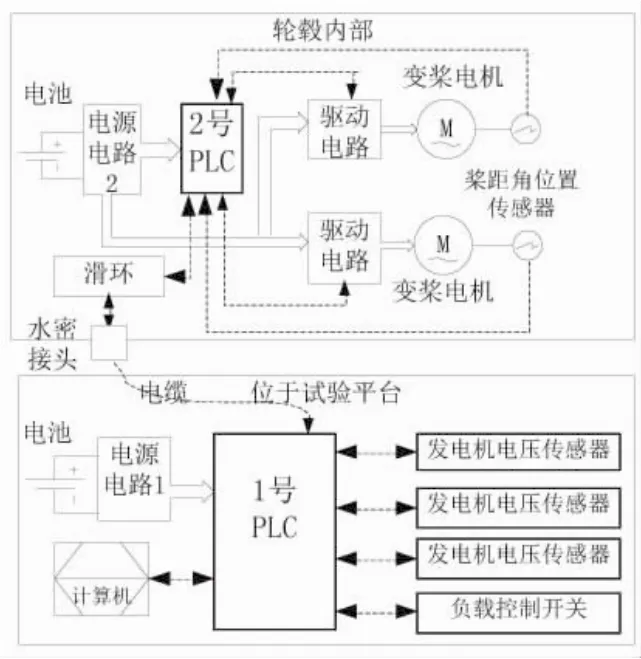
圖2 控制系統(tǒng)組成圖
主測控系統(tǒng)負(fù)責(zé)對樣機(jī)進(jìn)行總控制,包括1個(gè)控制計(jì)算機(jī)、1個(gè)可編程控制器PLC、3個(gè)測量傳感器、供電電池和電源電路、2個(gè)控制開關(guān)等。設(shè)置了獨(dú)立供電電池組和電源電路,與市電一起組成了一個(gè)聯(lián)合供電系統(tǒng)。3個(gè)傳感器包括發(fā)電機(jī)輸出電壓傳感器、輸出電流傳感器、供電系統(tǒng)蓄電池組電壓傳感器。
2 控制流程設(shè)計(jì)
2.1 機(jī)組工作特性分析
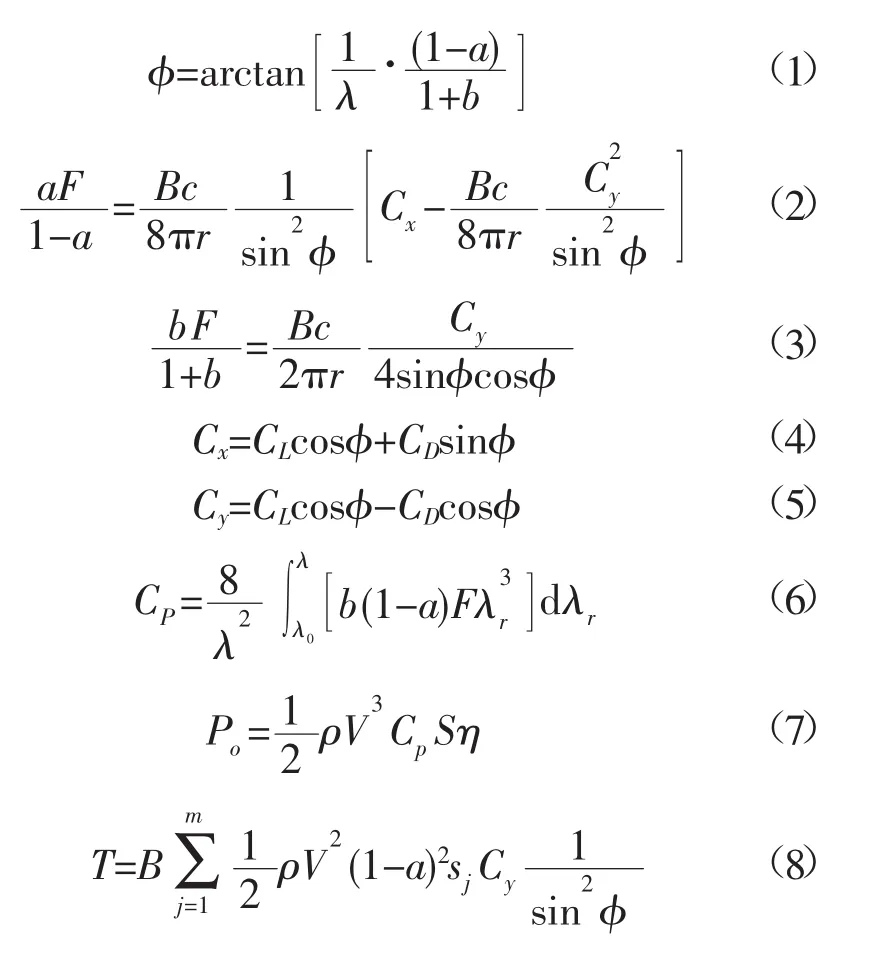
2.1.1 仿真模型 機(jī)組的控制參量需要通過機(jī)組的動(dòng)力學(xué)特性分析來確定。目前,葉素-動(dòng)量理論方法是水平軸潮流葉輪動(dòng)力特性仿真領(lǐng)域中常用的方法[7],利用該方法建立了機(jī)組的動(dòng)力特性仿真模型。模型的輸入?yún)⒘繛閬砹髁魉佟⑷~輪槳距角和轉(zhuǎn)速,輸出量為發(fā)電機(jī)輸出功率或葉輪輸出轉(zhuǎn)矩。主要計(jì)算公式為:式中:a,b為誘導(dǎo)系數(shù);φ為入流角;V為流速;F為葉尖和輪轂損失系數(shù);B為葉片的數(shù)量;r為葉素半徑;c為葉素的弦長;Cx為葉素軸向力系數(shù);Cy為葉素切向力系數(shù);CL為翼型的升力系數(shù);CD為翼型的阻力系數(shù);Cp為葉輪功率系數(shù);λ為尖速比;λr為葉素的尖速比;Po為發(fā)電機(jī)的輸出功率;ρ為海水的密度;S為葉輪的掃略面積;η為整個(gè)傳動(dòng)系統(tǒng)的效率,在此η取0.88;T為葉輪的輸出轉(zhuǎn)矩;sj為葉素的面積;m為葉素的數(shù)量。
2.1.2 模型驗(yàn)證 對仿真模型的合理性進(jìn)行了小比例模型試驗(yàn)驗(yàn)證。模型葉片按原型機(jī)以12.5:1的比例縮小,其葉輪直徑為800 mm。試驗(yàn)在天津大學(xué)拖曳水池中進(jìn)行,拖曳的速度為2 m/s,試驗(yàn)裝置如圖3所示。在發(fā)電機(jī)和葉輪之間設(shè)置了扭矩/轉(zhuǎn)速測量儀;發(fā)電機(jī)額定功率為800 W,額定轉(zhuǎn)速為400 r/min;扭矩/轉(zhuǎn)速儀的型號(hào)為ZH07-50B,轉(zhuǎn)矩的最大測量值50 Nm;發(fā)電機(jī)的輸出端接整流橋,整流橋的直流輸出端連接了一個(gè)50 Ω的滑動(dòng)變阻器。

圖3 模型試驗(yàn)裝置
葉輪功率系數(shù)的測試結(jié)果如圖4所示。圖中,橫軸為尖速比λ;縱軸為功率系數(shù);compute標(biāo)示的曲線為計(jì)算結(jié)果;test標(biāo)示的散點(diǎn)為試驗(yàn)結(jié)果。由圖可知:當(dāng)λ在6~8之間時(shí),模型計(jì)算的功率系數(shù)與試驗(yàn)結(jié)果較為吻合;當(dāng)尖速比超過8以后,仿真結(jié)果與試驗(yàn)結(jié)果出現(xiàn)一定的偏差。總體上來說,建立的仿真模型較為合理。
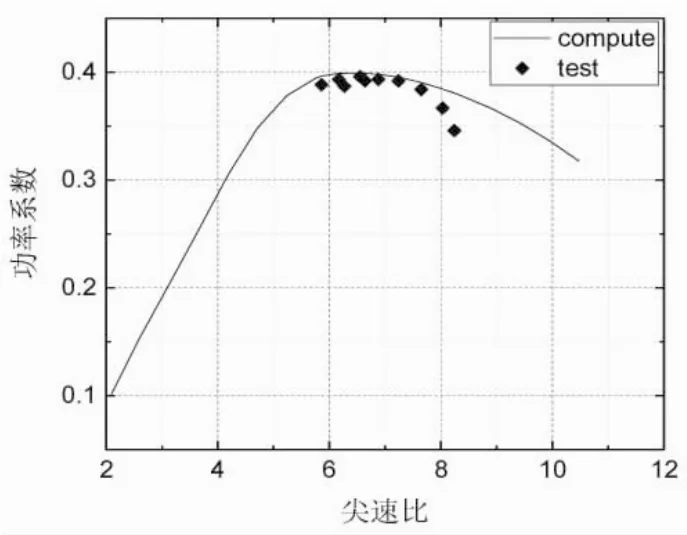
圖4 模型試驗(yàn)結(jié)果
2.2 變槳機(jī)組的動(dòng)力特性
2.2.1 啟動(dòng)參數(shù)分析 啟動(dòng)轉(zhuǎn)矩對機(jī)組的啟動(dòng)有著重要的影響,分析了不同初始槳距角葉輪的啟動(dòng)轉(zhuǎn)矩,對機(jī)組的啟動(dòng)性能作了進(jìn)一步的了解。計(jì)算過程中,假定葉輪靜止。計(jì)算結(jié)果如圖5所示。圖中,橫軸為葉片的槳距角;縱軸為葉輪的靜態(tài)啟動(dòng)轉(zhuǎn)矩;曲線標(biāo)示中的數(shù)字表示流速。共計(jì)考察了流速分別為0.6,0.8,1.0,1.2 m/s等4種流速條件下的轉(zhuǎn)矩特性。
由圖5可知:
(1)葉輪的靜態(tài)啟動(dòng)轉(zhuǎn)矩隨槳距角的增大出現(xiàn)了由小變大,再由大變小的變化趨勢。在槳距角達(dá)到60°左右時(shí),所有曲線的轉(zhuǎn)矩都達(dá)到了最大值,流速越大轉(zhuǎn)矩最大值也越大。
(2)通過變槳控制,在低流速條件下可獲得與較高流速時(shí)相同的轉(zhuǎn)矩。流速為1.2 m/s、槳距角為0°的靜態(tài)啟動(dòng)轉(zhuǎn)矩約為1.1 kN·m;根據(jù)曲線的變化趨勢,對于流速為0.65 m/s的情況,若槳距角達(dá)到15°時(shí)葉輪的靜態(tài)轉(zhuǎn)矩能夠達(dá)到1.2 kN·m,略大于1.2 m/s流速、槳0°距角的轉(zhuǎn)矩。
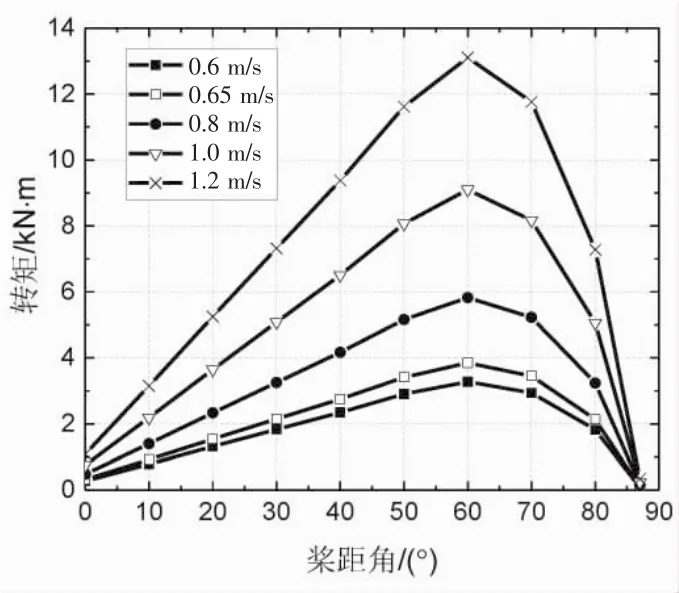
圖5 葉輪啟動(dòng)轉(zhuǎn)矩
(3)當(dāng)槳距角接近90°時(shí),葉輪的轉(zhuǎn)矩幾乎為0 kN·m。因此,當(dāng)流速超過最大工作流速后,可將葉片的槳距角調(diào)整至90°,使葉輪的轉(zhuǎn)矩降低至極低的數(shù)值,從而實(shí)現(xiàn)停機(jī)保護(hù)。
參考國內(nèi)水平軸潮流發(fā)電機(jī)組的啟動(dòng)流速情況,不變槳機(jī)組的啟動(dòng)流速不超過0.9 m/s[8]。因此,將本機(jī)組的啟動(dòng)流速設(shè)定在0.65 m/s,初始槳距角設(shè)定在40°(反向來流時(shí)為220°),其靜態(tài)啟動(dòng)轉(zhuǎn)矩約為 2.5 kN·m。
對于基于發(fā)電機(jī)輸出電力參數(shù)進(jìn)行控制的方法來說,需要確定啟動(dòng)的判斷依據(jù)。由于在啟動(dòng)前,樣機(jī)處于不帶載的狀態(tài),無法依據(jù)輸出功率進(jìn)行機(jī)組啟動(dòng)。但葉輪啟動(dòng)后發(fā)電機(jī)會(huì)有電壓輸出,因此制定了依靠發(fā)電機(jī)電壓判斷機(jī)組是否啟動(dòng)的策略。
利用仿真模型計(jì)算了0.65 m/s條件下,0°和40°兩種不同槳距角葉輪轉(zhuǎn)矩與轉(zhuǎn)速的對應(yīng)關(guān)系,如圖6所示。圖中,橫軸為轉(zhuǎn)速,單位rpm;縱軸為葉輪轉(zhuǎn)矩,單位kN·m。曲線標(biāo)示中的數(shù)字代表槳距角。由圖可知,在初始槳距角為40°的條件下,葉輪的最大可能轉(zhuǎn)速約為2.0 rpm,超過該數(shù)值后葉輪的輸出轉(zhuǎn)矩就會(huì)接近為0 kN·m;0°槳距角的情況則相反,在低轉(zhuǎn)速時(shí)轉(zhuǎn)矩很小,一旦啟動(dòng)后則轉(zhuǎn)矩隨轉(zhuǎn)速的加大而迅速增大。
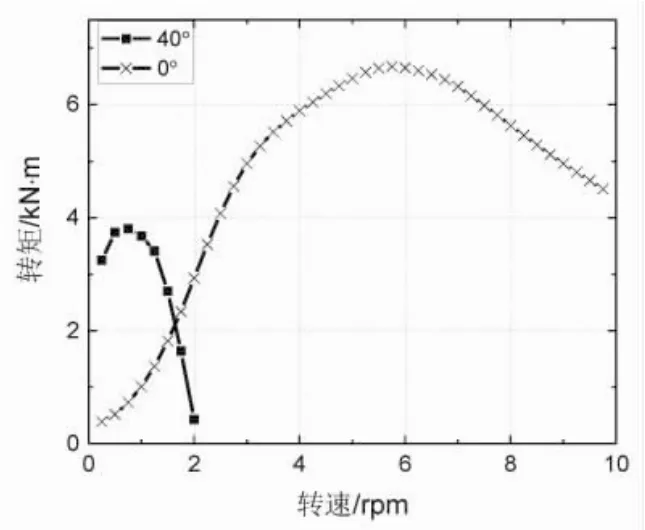
圖6 啟動(dòng)流速葉輪轉(zhuǎn)速與轉(zhuǎn)矩

2.2.2 功率限定參數(shù)分析 當(dāng)流速超過額定流速后,需要調(diào)整槳距角以控制機(jī)組的輸出功率,即功率限定問題。利用仿真模型對額定流速~最大流速間的槳距角進(jìn)行了優(yōu)化,優(yōu)化變量為槳距角,優(yōu)化目標(biāo)為將發(fā)電機(jī)輸出功率限定在額定值。優(yōu)化的結(jié)果如圖7所示。圖中,橫軸為潮流流速,縱軸為發(fā)電機(jī)輸出功率和槳距角的設(shè)定值。另外,對于啟動(dòng)流速~額定流速間的發(fā)電情況也進(jìn)行了仿真計(jì)算,期間葉輪始終保持最佳尖速比工作狀態(tài),不進(jìn)行變槳控制。
由計(jì)算結(jié)果可知:當(dāng)流速超過額定流速2.15 m/s后,在將槳距角調(diào)整至適當(dāng)值的情況下,發(fā)電機(jī)的
結(jié)合圖5~圖6可知,在啟動(dòng)過程中,當(dāng)流速達(dá)到一定數(shù)值后,葉輪會(huì)呈現(xiàn)出緩慢轉(zhuǎn)動(dòng)的狀態(tài)。為保證機(jī)組的啟動(dòng),當(dāng)葉輪開始轉(zhuǎn)動(dòng)后,必須及時(shí)啟動(dòng)變槳系統(tǒng),將葉片的槳距角由40°調(diào)整至0°(或由220°調(diào)至180°),以盡快提高葉輪的轉(zhuǎn)速。圖6中,40°轉(zhuǎn)矩曲線中最大轉(zhuǎn)矩對應(yīng)的轉(zhuǎn)速約為1.0 rpm,而兩條曲線的交點(diǎn)的轉(zhuǎn)速約為1.64 rpm,因此啟動(dòng)電壓可選取葉輪轉(zhuǎn)速在1.0~1.64 rpm之間對應(yīng)的電壓。假定在輸出端開路的情況下發(fā)電機(jī)的輸出電壓與轉(zhuǎn)速成正比,則啟動(dòng)電壓的范圍約為:輸出功率在149.3~150.5 kW之間變化。通過變槳的手段,能夠有效調(diào)控發(fā)電機(jī)的輸出功率,解決功率限定問題。另外,最佳槳距角的數(shù)值隨流速的增大而增大,兩者間成非線性關(guān)系;當(dāng)達(dá)到最大工作流速2.5 m/s時(shí),槳距角也增至最大值7.7°。
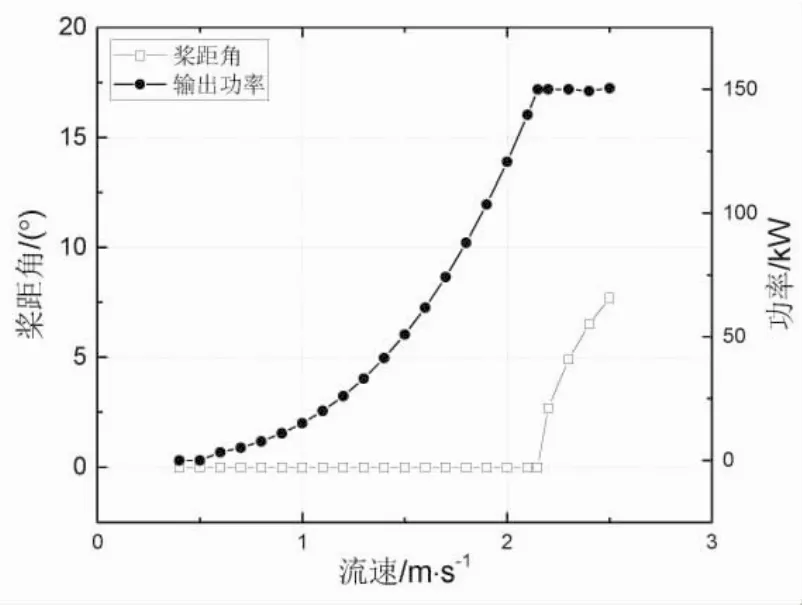
圖7 發(fā)電功率和槳距角
對于流速超過額定流速時(shí)的功率限定問題,可以以發(fā)電機(jī)輸出功率作為控制的參考量,即根據(jù)發(fā)電機(jī)輸出量與額定功率的差值,再結(jié)合槳距角的調(diào)整情況,對槳距角進(jìn)行調(diào)整,以控制發(fā)電機(jī)的輸出功率。
2.3 控制流程設(shè)計(jì)
基于變槳控制手段,設(shè)計(jì)了水平軸潮流發(fā)電機(jī)組的控制流程。控制流程以發(fā)電機(jī)輸出電壓或功率為控制輸入變量,涵蓋了機(jī)組的低流速待機(jī)、啟動(dòng)、功率限定和停機(jī)保護(hù)等全部工作過程。控制流程如圖8所示,圖中θ為槳距角;P為發(fā)電機(jī)輸出功率;Pm為額定功率;U為發(fā)電機(jī)電壓。
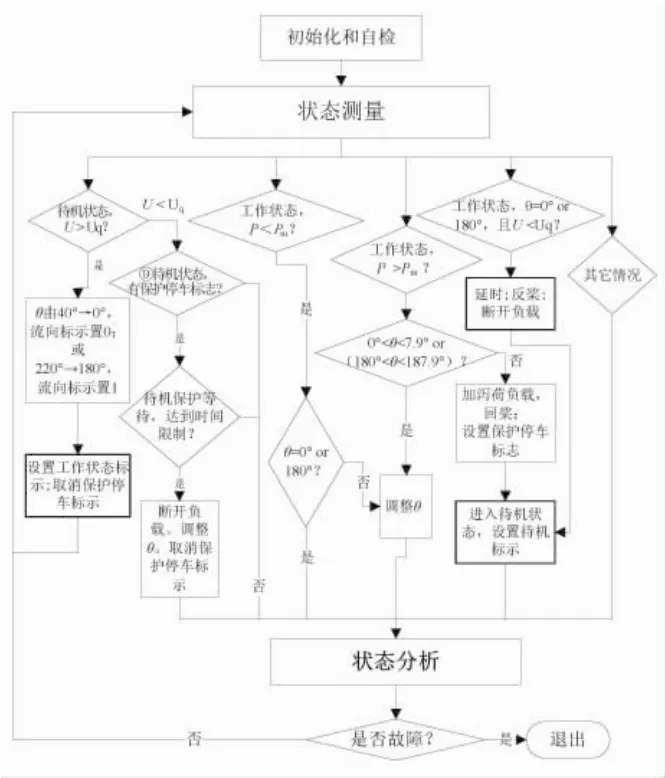
圖8 控制流程圖
控制流程分4個(gè)部分,分別為初始化、狀態(tài)測量、調(diào)控、狀態(tài)判斷。在初始化階段,主要對控制系統(tǒng)的一些參數(shù)進(jìn)行設(shè)置。狀態(tài)測量部分主要對樣機(jī)的各參量進(jìn)行測量;調(diào)控部分主要根據(jù)機(jī)組的狀況對其進(jìn)行控制;狀態(tài)分析部分主要是分析判斷樣機(jī)的工作狀態(tài)是否合理。在運(yùn)行過程中,程序在狀態(tài)測量、調(diào)控、狀態(tài)分析等3部分進(jìn)行循環(huán)。
調(diào)控階段主要依據(jù)發(fā)電機(jī)輸出電壓或功率,分析判斷是否需要做出變槳調(diào)控,主要分啟動(dòng)、低于額定功率發(fā)電、額定功率發(fā)電和超出工作極限等情況。
為了避免程序誤判和簡化流程,增加了樣機(jī)工作狀態(tài)、保護(hù)停車等狀態(tài)變量。將的樣機(jī)工作狀態(tài)設(shè)定為兩種:工作狀態(tài)、待機(jī)狀態(tài)。樣機(jī)的工作狀態(tài)對應(yīng)于發(fā)電機(jī)有有效輸出功率的階段,槳距角小于最大調(diào)整槳距角。
待機(jī)狀態(tài)分兩種情況,一是樣機(jī)停止發(fā)電且無故障,處于正常待機(jī)狀態(tài),葉片處在40°或220°槳距角的位置,發(fā)電系統(tǒng)斷開全部負(fù)載,這個(gè)階段對應(yīng)于流速過低的情況;二是保護(hù)待機(jī)狀態(tài),將槳距角調(diào)整至90°,機(jī)組停機(jī),發(fā)電機(jī)輸出端施加全部瀉荷保護(hù)負(fù)載,這個(gè)狀態(tài)對應(yīng)于流速過大的情況。
機(jī)組的啟動(dòng)主要依據(jù)發(fā)電機(jī)輸出電壓。在斷開載荷和初始槳距角為40°或220°的情況下,當(dāng)發(fā)電機(jī)輸出電壓達(dá)到啟動(dòng)電壓時(shí),啟動(dòng)變槳裝置,將槳距角由 40°調(diào)整至 0°(或由 220°調(diào)至 180°),機(jī)組進(jìn)入工作狀態(tài)。
進(jìn)入工作狀態(tài)后,發(fā)電機(jī)輸出端接通負(fù)載,系統(tǒng)開始發(fā)電。測控系統(tǒng)實(shí)時(shí)監(jiān)測發(fā)電機(jī)輸出功率,根據(jù)輸出功率和槳距角的情況,判斷是否進(jìn)行調(diào)控。在輸出功率小于額定功率且槳距角為0°或180°的情況下,保持發(fā)電工作狀態(tài)。當(dāng)發(fā)電機(jī)輸出功率超過額定功率后,說明流速已超過額定流速;測控系統(tǒng)需要啟動(dòng)變槳系統(tǒng),逐漸增大槳距角。若槳距角超過7.9°或187.9°后,發(fā)電機(jī)輸出功率仍然大于額定功率,則說明流速已超過最大工作流速,需要轉(zhuǎn)入保護(hù)待機(jī)狀態(tài)。如果槳距角在0°~7.9°(或180°~187.9°)范圍內(nèi),但發(fā)電機(jī)輸出功率小于額定功率,則說明本次潮流周期的最大流速未達(dá)到最大工作流速,且流速已經(jīng)開始降低;此時(shí)采取減小槳距角的措施,但槳距角的數(shù)值不得低于0°或180°。
在槳距角為0°或180°的情況下,若發(fā)電機(jī)輸出功率持續(xù)減小,發(fā)電電壓低于啟動(dòng)電壓,則說明流速已降低至啟動(dòng)流速以下,機(jī)組應(yīng)進(jìn)入待機(jī)狀態(tài)。這種情況下,機(jī)組等待一段時(shí)間,然后進(jìn)行反槳處理,即將槳距角由0°調(diào)整至220°(或由180°調(diào)至40°),斷開全部負(fù)載,等待反向潮流。
若機(jī)組進(jìn)入待機(jī)保護(hù)狀態(tài),則將槳距角調(diào)整至90°,施加瀉荷保護(hù)負(fù)載,機(jī)組停止工作,并設(shè)置待機(jī)保護(hù)標(biāo)志。然后,機(jī)組保持待機(jī)保護(hù)狀態(tài),直至達(dá)到預(yù)定的時(shí)長——待機(jī)保護(hù)時(shí)長。
3 控制過程仿真分析
3.1 潮流計(jì)算模型
我國近岸海域的潮汐和潮流大部分為正規(guī)半日潮。對于正規(guī)半日潮,一個(gè)潮汐周期內(nèi)潮流速度的變化情況可簡化表示為[9]:

式中:V為潮流的流速;Tc為潮汐的周期,取12 h 25'14.1'';Vm為本次潮汐周期中的最大流速;t為時(shí)間。
正規(guī)半日潮在一天內(nèi)近似有2次變化周期,每半月周期內(nèi)有一次大潮和一次小潮。對于我國潮流資源較好的地區(qū)來說大潮最大流速超過了3 m/s,而小潮最大流速往往會(huì)遠(yuǎn)小于大潮最大流速,其它潮汐周期中的最大流速介于大、小潮最大流速之間。為檢驗(yàn)控制流程的合理性,需要對多種潮流流速變化情況下機(jī)組發(fā)電情況進(jìn)行分析。
3.2 發(fā)電過程仿真
考察了最大流速低于額定流速、最大流速低于最大工作流速和最大流速超過最大工作流速等3種不同流速條件下機(jī)組的工作情況。計(jì)算過程中,仿真時(shí)間步長為1 min,并假定機(jī)組在流速0.65 m/s時(shí)啟動(dòng)。
3.2.1 最大流速低于額定流速 對于最大流速低于額定流速的工況進(jìn)行了分析。計(jì)算過程中,最大流速為1.8 m/s。仿真結(jié)果如圖9所示。圖中,橫軸為時(shí)間,單位min;上圖縱軸為流速,單位m/s;下圖縱軸分別為發(fā)電機(jī)輸出功率和槳距角數(shù)值,單位分別為 kW 和(°)。
由圖9可知,控制流程效果較好,樣機(jī)實(shí)現(xiàn)了雙向流發(fā)電,輸出功率隨流速的增大而增大;當(dāng)流速達(dá)到最大值1.8 m/s時(shí),發(fā)電機(jī)的輸出功率達(dá)到了77.5 kW的最大值;當(dāng)流速低于啟動(dòng)流速后,樣機(jī)停止發(fā)電。
槳距角的變化情況與發(fā)電情況相吻合。在啟動(dòng)之前,潮流流向?yàn)檎颍瑯嘟浅跏嘉恢脼?0°,葉輪未啟動(dòng)工作,樣機(jī)處于“待機(jī)”狀態(tài)。當(dāng)流速增大至啟動(dòng)流速后,葉輪帶動(dòng)發(fā)電機(jī)轉(zhuǎn)動(dòng),測控系統(tǒng)啟動(dòng)樣機(jī)發(fā)電,并將槳距角調(diào)整至0°。在發(fā)電過程中,由于最大輸出功率和電壓未超過限定值,因此未做變槳調(diào)整,槳距角始終保持在0°。而當(dāng)流速降低到啟動(dòng)流速以下時(shí),測控系統(tǒng)控制樣機(jī)不再輸出電能,并將槳距角調(diào)整至220°,為反向來流的啟動(dòng)和發(fā)電工作做好準(zhǔn)備。在隨后的低流速期間,樣機(jī)保持“待機(jī)”狀態(tài)。
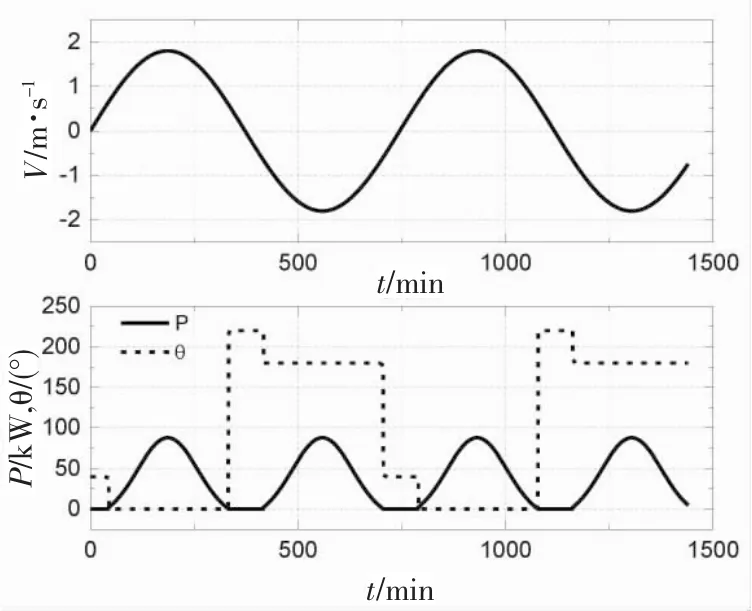
圖9 最大流速1.8 m/s時(shí)發(fā)電情況
當(dāng)反向流速增大至啟動(dòng)流速后,葉輪帶動(dòng)發(fā)電機(jī)轉(zhuǎn)動(dòng),測控系統(tǒng)啟動(dòng)樣機(jī)發(fā)電,并將槳距角調(diào)整至180°。在發(fā)電過程中,槳距角始終保持在180°。當(dāng)流速降低到啟動(dòng)流速以下時(shí),將槳距角調(diào)整至40°,為后續(xù)正向來流的啟動(dòng)和發(fā)電工作做好準(zhǔn)備。至此,潮流機(jī)組完成了一個(gè)流速循環(huán)的發(fā)電過程。
3.2.2 最大流速超過額定值 對于最大流速超過額定流速、但低于最大工作流速的工況進(jìn)行了分析。計(jì)算過程中,最大流速為2.4 m/s;在輸出功率超過額定值時(shí),采用變槳的方法控制輸出功率,每次“調(diào)控”中調(diào)整一次槳距角,槳距角每一次調(diào)整的調(diào)整量為0.5°;在啟動(dòng)和停止過程中,槳距角在40°,0°,220°,180°間轉(zhuǎn)換時(shí)的時(shí)間忽略不計(jì)。
仿真結(jié)果如圖10所示。圖中,橫軸為時(shí)間,單位min;上圖縱軸為流速,單位m/s;下圖縱軸分別為發(fā)電機(jī)輸出功率和槳距角數(shù)值,單位分別為kW和(°)。
由圖可知,槳距角和的變化情況與發(fā)電情況相吻合。另外,在發(fā)電過程中,由于最大流速已超過了額定流速,測控系統(tǒng)通過變槳控制的方式限制了最大輸出功率。因此,發(fā)電曲線的頂部被削平,削平段的輸出功率被限制到了額定功率150 kW。與削平段發(fā)電功率曲線相對應(yīng)的槳距角不再保持0°或180°,而是出現(xiàn)了調(diào)控角度。
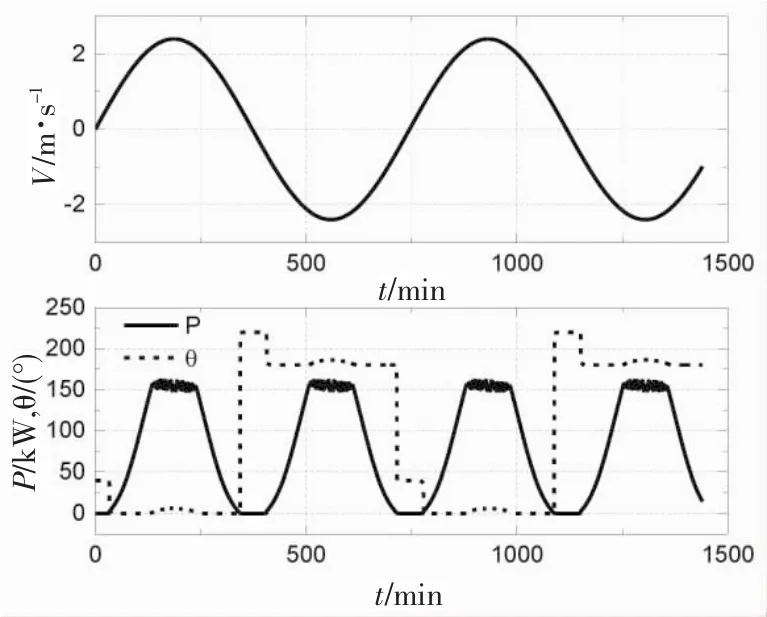
圖10 最大流速2.4 m/s時(shí)發(fā)電情況
3.2.3 最大流速超過最大工作流速 對于最大流速超過最大工作流速的工況進(jìn)行了分析。計(jì)算過程中,最大流速為2.8 m/s;輸出功率超過額定值后,每次變槳調(diào)控的調(diào)整量為0.5°;在啟動(dòng)、保護(hù)停車和正常停止過程中,槳距角在 40°,0°,220°,180°,90°間轉(zhuǎn)換時(shí)的時(shí)間忽略不計(jì)。另外,“待機(jī)保護(hù)時(shí)長”是一個(gè)重要的參數(shù),考察了待機(jī)保護(hù)時(shí)長分別為100 min,150 min等2種情況。
仿真結(jié)果如圖11所示。圖中,上面的圖為流速變化情況,中間的圖為“待機(jī)保護(hù)時(shí)長”為100 min時(shí)樣機(jī)發(fā)電機(jī)輸出功率和葉片槳距角變化情況,下面的圖為“待機(jī)保護(hù)時(shí)長”為150 min時(shí)樣機(jī)發(fā)電機(jī)輸出功率和葉片槳距角變化情況。圖中橫軸均為時(shí)間。
由圖可知,控制流程效果較好,槳距角和的變化情況與發(fā)電情況相吻合;在發(fā)電過程中,當(dāng)流速超過額定流速后,測控系統(tǒng)限制了最大輸出功率。在流速超過最大工作流速2.5 m/s以后,測控系統(tǒng)作出了停車保護(hù)的動(dòng)作。與之對應(yīng)的槳距角變?yōu)?0°,輸出功率變?yōu)?,發(fā)電功率曲線出現(xiàn)了凹形。凹形曲線對應(yīng)的時(shí)長即為“待機(jī)保護(hù)時(shí)長”。
“待機(jī)保護(hù)時(shí)長”是一個(gè)重要的參數(shù),對控制效果有著較大的影響。待機(jī)保護(hù)時(shí)長為100 min的發(fā)電曲線出現(xiàn)了較大超調(diào)量的情況,功率的最大值超過了252 kW,對機(jī)組造成潛在的危害。造成這種情況的原因是待機(jī)保護(hù)時(shí)長較短,當(dāng)流速仍大于額定流速時(shí)測控系統(tǒng)將槳距角由90°調(diào)回了0°或180°。在這種情況下,雖然可使得讓樣機(jī)再次進(jìn)入保護(hù)狀態(tài),但會(huì)造成后續(xù)長時(shí)間機(jī)組停止工作的局面,同時(shí)存在控制流程產(chǎn)生混亂的風(fēng)險(xiǎn)。
待機(jī)保護(hù)時(shí)長為150 min的發(fā)電曲線未出現(xiàn)發(fā)電機(jī)輸出功率超過額定值的情況,但在流速下降段發(fā)電時(shí)間相對較短,存在潮流資源利用不充分的問題。
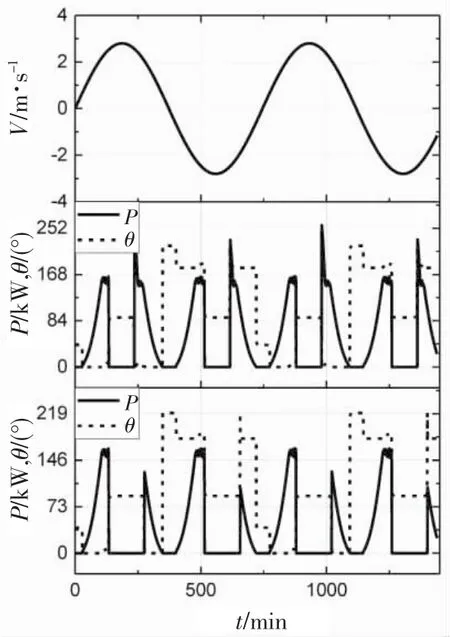
圖11 最大流速2.8 m/s時(shí)發(fā)電情況
總之,以發(fā)電機(jī)輸出電力參數(shù)為判斷依據(jù)的控制流程能夠較好實(shí)現(xiàn)對潮流發(fā)電機(jī)組的控制,避免了與測流設(shè)備整合的問題。這種控制方法中的“待機(jī)保護(hù)時(shí)長”無法僅僅通過電力參數(shù)進(jìn)行合理地確定。針對這個(gè)問題,可以依據(jù)當(dāng)?shù)爻绷髁魉僮兓闆r,利用潮流分析模型確定合理的保護(hù)時(shí)長限制值。
4 結(jié)論
針對水平軸潮流能發(fā)電機(jī)組的控制策略問題開展了研究,制定了基于發(fā)電機(jī)輸出電壓和輸出功率的控制策略,設(shè)計(jì)了控制流程,并對控制流程進(jìn)行了仿真研究。研究結(jié)果表明:
(1)基于發(fā)電機(jī)輸出電力參數(shù)的控制策略,能夠較好地與潮流變化規(guī)律相結(jié)合,實(shí)現(xiàn)對機(jī)組發(fā)電過程的控制,對于避免測流系統(tǒng)整合或測流不準(zhǔn)確等問題,簡化控制系統(tǒng)有利。
(2)對于基于發(fā)電機(jī)輸出電力參數(shù)的控制流程來說,流速超過最大工作流速情況下的待機(jī)保護(hù)時(shí)長是一個(gè)較為關(guān)鍵的參數(shù),若設(shè)置不當(dāng)則會(huì)引起機(jī)組過載或潮流資源利用不充分的問題,該參數(shù)的設(shè)定需要結(jié)合當(dāng)?shù)爻绷髯兓?guī)律。
[1]戴慶忠.潮流能發(fā)電及潮流能發(fā)電裝置[J].東方電機(jī),2010(2):51-66.
[2]王波.兆瓦級(jí)海洋潮流能發(fā)電機(jī)組在舟山成功發(fā)電[J].能源研究與信息,2016(3):186-186.
[3]張理,李志川,肖鋼,等.中低流速潮流能發(fā)電系統(tǒng)關(guān)鍵技術(shù)研究[J].中國海上油氣,2013,25(6):115-118.
[4]王剛,厲文超,王樹杰,等.海洋潮流能發(fā)電機(jī)組控制系統(tǒng)開發(fā)[J].電力系統(tǒng)自動(dòng)化,2010,34(14):23-26.
[5]劉宏偉,李偉,林勇剛,等.水平軸潮流能發(fā)電機(jī)組液壓變槳技術(shù)研究與海試[J].海洋技術(shù)學(xué)報(bào),2016,35(5):66-69.
[6]鞏冰,朱麗娟,游江.海洋潮流能發(fā)電系統(tǒng)的控制技術(shù)研究[J].電測與儀表,2010,47(8):36-40.
[7]王兵振,張巍,夏增艷,等.水平軸潮流能葉輪性能仿真模型研究[J].海洋技術(shù)學(xué)報(bào),2013,32(3):110-113.
[8]國家海洋技術(shù)中心.中國海洋能技術(shù)進(jìn)展(2014)[M].北京:海洋出版社,2014.
[9]鄭志南.海洋潮流能的估算[J].海洋通報(bào),1987,04:70-75.
Design of the Control Process of Horizontal Axis Tidal Power Generation Equipment
WANG Bing-zhen,GUO Yi,ZHANG Wei,WU He
National Ocean Technology Center,Tianjin 300112,China
A study is carried out focusing on the flow control of the developing horizontal axis tidal power equipment.Based on the blade element momentum theory,a dynamics simulation model is established in this paper.The starting torque and speed characteristics of power equipment are researched by use of the simulation model,and the power limited problem under the condition of flow velocity exceeding rated velocity is also studied.The control strategy for startup is designed according to generator output voltage,and limit control strategy for output power is designed by use of output power.Taking into account the change rule of tidal currents,the control flow is simulated in this paper.The results show that the control flow based on the output power parameters of the generator can realize the control of the generator.
tidal current energy;power generation;control process;simulation
P743.1
A
1003-2029(2017)05-0104-08
10.3969/j.issn.1003-2029.2017.05.017
2017-04-05
海洋公益性行業(yè)科研專項(xiàng)經(jīng)費(fèi)資助項(xiàng)目(201205019-3)
王兵振(1972-),男,博士,主要從事海洋可再生能源開發(fā)利用技術(shù)研究。E-mail:wang_bingzhen@163.com
猜你喜歡
故事作文·高年級(jí)(2021年12期)2021-12-21 02:32:35
大電機(jī)技術(shù)(2017年3期)2017-06-05 09:36:02
軍事文摘(2016年16期)2016-09-13 06:15:49
廣西電力(2016年6期)2016-07-10 12:03:37
通信電源技術(shù)(2016年5期)2016-03-22 01:09:38
智能建筑電氣技術(shù)(2015年5期)2015-12-10 05:52:30
電測與儀表(2015年13期)2015-04-09 11:57:12
電測與儀表(2015年2期)2015-04-09 11:29:14
水電站機(jī)電技術(shù)(2014年6期)2014-09-26 12:07:48
水電站機(jī)電技術(shù)(2014年1期)2014-09-26 11:59:45