軌道交通車輛輪-軸同心度自動檢測機研制*
2017-11-16 11:23:13盧桂云王素姣
城市軌道交通研究 2017年11期
盧桂云 王素姣
軌道交通車輛輪-軸同心度自動檢測機研制*
盧桂云1王素姣2
(1.鄭州鐵路職業技術學院,450052,鄭州;2.北京鐵路電氣化學校,102202,北京∥第一作者,副教授)
針對傳統測量工具無法快速準確測量軌道交通車輛的車輪與車軸同心度問題,設計了一種輪-軸同心度專用檢測機。詳細描述了同心度的檢測原理以及關鍵組件的結構設計。該檢測裝置結構簡單實用,能快速準確地測出車輛輪-軸同心度,大大提高了檢測精度和檢測效率,解決了檢測技術難題,為輪對的進一步加修提供測量依據,確保車輛運行的安全性、平穩性,提高了旅客乘坐舒適度。
軌道交通車輛;輪對;輪-軸同心度;自動檢測機
隨著我國軌道交通系統的快速發展,為滿足新技術、新材料、新裝置和高速鐵路的發展需求,進一步統一鐵路客車輪對組裝、信息化管理和檢修質量標準,中國鐵路總公司于2014年元月統一制定了《鐵路客車輪軸組裝檢修及管理規則》(以下簡稱《規則》),并開始執行。《規則》中第3.7條的(5)中規定,同一車輪踏面與軸頸面在同一直線上測量的兩點距離差超限,應對車輪進行加修。《規則》中附件14《輪對、軸承和軸箱裝置檢修限度表》中14.3.10.5條也明確了同一車輪踏面與軸頸面的距離差的相關技術標準:運行速度不超過120 km/h的車輛,不大于0.6 mm;運行速度不超過140 km/h的車輛,不大于0.5 mm;運行速度不超過160 km/h的車輛,不大于0.4 mm。
目前,國內對于同一輪對輪-軸同心度檢測,即踏面與軸頸面的距離差的檢測,主要是通過車輪圓周跳動測量表進行人工檢測。該檢測方法檢測點數少、檢測效率低、數據讀取誤差大、檢測精度低。輪-軸同心度自動檢測機的研制,可實現由人工檢測到自動檢測、由直接接觸式檢測到非接觸式檢測,實現檢測數據的自動采集、自動處理,超限自動報警,且能夠進行檢測數據的自動儲存、打印和輸出等功能,可有效提高檢測效率和檢測精度,為輪對加修提供技術依據。
1 主要研究內容及要求
研究內容包括:①檢測原理;②測量探頭的選擇;③數據的采集及處理;④探頭檢測位置的自動定位;⑤結構設計與研究;⑥氣動控制系統設計。
關鍵技術要求包括:①測距探頭檢測位置的自動定位(機械結構的設計和電氣控制);②數據采集時機的確定和數據的邏輯運算處理,控制傳感器的工作狀態;③配合輪軸旋轉部分確定檢測頻率、周期;④將處理數據發送上位機進行顯示、儲存、打印和調取;⑤超限數據語音報警提示和標識。
2 輪-軸同心度自動檢測機的研制
2.1 同心度檢測原理
輪-軸同心度檢測原理如圖1所示。圖1中,h1為激光探頭1到輪對踏面滾動圓的距離,h2為激光探頭2到車軸軸頸面的距離,x1為機械構架基準面到激光探頭1的距離,x2為機械構架基準面到激光探頭2的距離,k為同軸度檢測儀的機架基準面到軸頸面與車輪踏面的距離差。如車輛輪對沿圓周方向軸頸面與車輪踏面上各對應點的距離之差,即k1,k2,…,kn的值大小相等,即可判定車輛輪對具有良好的同軸度;如任意兩點之差P=|kj-ki|≠0(式中j和i為軸頸面與車輪踏面圓周方向任意兩點),說明此輪對的同軸度存在偏差,如P值的大小超過相關技術標準規定的使用限度,則必須對輪對進行加修。
通過模型計算可知,k+h1+x1=h2+x2,即k=h2+x2-(h1+x1)。

圖1 輪-軸同心度自動檢測原理
2.2 測量探頭的選擇
根據檢測精度的技術要求,本方案選擇了基恩士IL-S系列智能化加強版激光位移傳感器ILS065。其基本參數如下:①測量范圍,55~75 mm(基準距離65 mm);② 光源輸出功率,560 μW;③輸出類型,紅色半導體激光,波長655 nm(可見光);④激光類別,2類激光產品;⑤光點范圍,約550 μm ×1 750 μm(基準距離時);⑥ 線性度,在55~65 mm時±0.05%F.S.,在 55~75 mm 時±0.075%F.S.(F.S.為滿量程誤差,也稱線性度或非線性誤差);⑦ 重復精度,2 μm;⑧ 采樣周期,0.33 ms、1 ms、2 ms、5 ms(4 級可調);⑨ 工作狀態指示,綠色LED發射警告指示燈,橙色LED模擬范圍指示燈,紅色/綠色LED參考距離指示燈;⑩外殼防護級,IP67;11○ 周圍溫度,-10℃ ~ +50℃(無凝結、無凍結);12○ 周圍濕度,35% ~85%(無凝結);13○ 抗振,10 ~ 55 Hz雙倍振幅 1.5 mm,x、y、z各方向 2 h;14○質量,約 75 g。
本激光傳感器應用了三角測量的測定原理,圖2為基恩士激光傳感器測距原理圖。當目標物的位置發生變動時,IL-S065激光位移傳感器上的入光位置即會移動,通過檢測入光位置,來測定目標物的變位量。

圖2 IL-S065型激光傳感器測距原理圖
2.3 數據采集與處理
采用8位單片機將傳感器采集到的數據經邏輯運算處理,控制傳感器的工作狀態,配合輪軸旋轉速度確定檢測頻率、周期,通過相應軟件實現數據的自動處理和干擾數據的自動篩選,將處理數據發送上位機進行顯示、儲存、打印和調取。將超出正常使用標準的檢測結果(超標位置和測量數據)進行語音報警提示和顏色標識。
2.4 探頭檢測位置的自動定位
通過機械傳動部分實現車輪自動旋轉,采用高精度的激光探頭,完成圓周方向的數據采集,并在測量時能實現探頭的自動定位。
自動定位分水平和豎直兩個方向。由于現階段我國軌距均采用的是國際標準軌距1 435 mm,輪對內測距相對固定,所以水平方向的定位主要是以車輪踏面滾動圓(距離輪對內側面70 mm)為基準進行定位。由于車輛輪對型號不同,車輪有新輪(輪徑915 mm)、半磨耗輪(輪徑860 mm)與磨耗輪(輪徑770 mm)之分,車軸有RC型軸(軸徑120 mm)和RD型軸(軸徑130 mm)之分,因此車輪輪徑和軸徑大小差別很大。而激光測距探頭又有最佳的檢測距離(55~75 mm之間)的要求,所以輪-軸同心度檢測機在輪對檢測時通過在檢測探頭安裝支架的端部設置接近傳感器,實現了豎直方向的自動定位,使得每次對不同輪對檢測時車輪踏面探頭和軸頸面探頭都能處于最佳的檢測位置。
2.5 同心度自動檢測機總體結構設計
圖3為輪-軸同心度自動檢測機的總體結構示意圖。輪對軸向夾緊機構主要用于輪對的軸向定位;輪對推出機構主要用于檢測結束后的輪對推出;輪對旋轉驅動機構主要用于在輪對檢測時驅動輪對以一定的速度旋轉;車輪踏面探頭驅動機構及軸頸面探頭驅動機構主要是依靠步進電機和絲杠傳動,并通過接近傳感器、行程開關等控制機構實現對激光測距傳感器的精確控制。采用高精度激光測距傳感器用于完成探頭到車輪踏面及軸頸面的尺寸測量。機體側面設置有設備控制柜及外部設備,包括電氣控制箱、液壓控制箱、工控主機、打印機等,實現激光測距傳感器的自動定位、自動測距、測量數據的自動采集、自動處理、干擾數據的自動過濾、數據儲存等處理,以完成輪-軸同心度的自動測量。
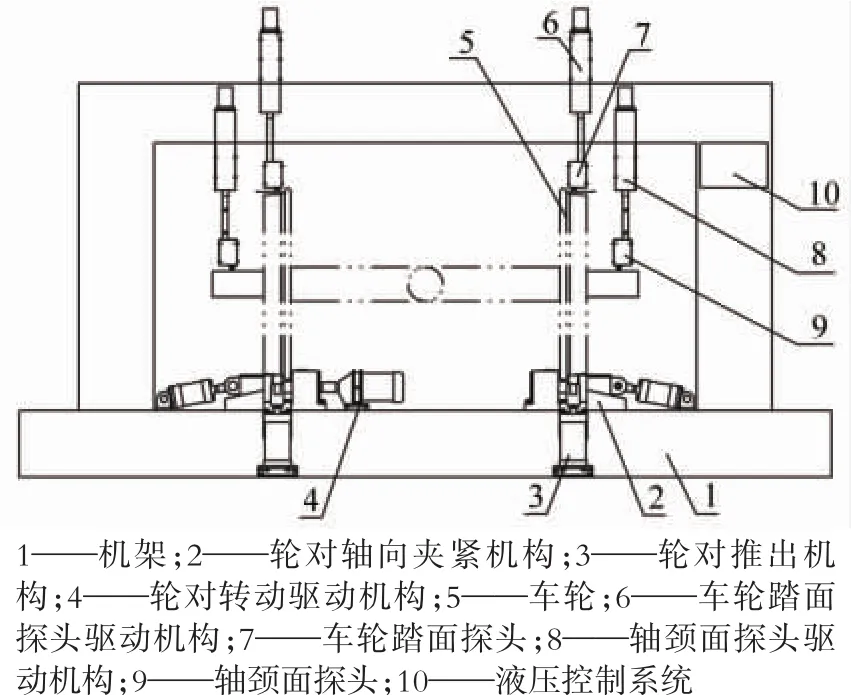
圖3 輪-軸同心度自動檢測機的總體結構示意圖
2.5.1 輪對軸向夾緊定位機構
輪對軸向夾緊機構主要是在輪對到達待測位后,為了確保測量位置的準確度而設置的輪對軸向定位裝置。設備兩側分別設置兩套夾緊裝置。輪對軸向夾緊機構主要是通過控制夾緊油缸活塞桿的伸縮來控制夾緊定位塊的軸向移動,使兩側的夾緊定位塊作用于兩側車輪踏面的外側,完成輪對的軸向定位。
圖4為輪對軸向夾緊機構示意圖。其中:夾緊油缸尾部通過后座耳固定在機架上;夾緊氣缸尾部與后座耳之間通過連接軸及偏心套樞接;夾緊油缸與夾緊定位塊之間通過連接軸及襯套樞接,面板設在夾緊定位塊上,夾緊定位塊與底部所設的下導向塊滑動匹配連接。

圖4 輪對軸向夾緊定位機構示意圖
2.5.2 輪對轉動驅動機構
輪對驅動機構是用來驅動輪對在檢測臺位的勻速轉動。由于輪-軸同心度檢測需采集車輪踏面及軸頸面一周的相關數據,所以在檢測時需驅動輪對以一定的速度緩慢轉動。
圖5為輪對旋轉驅動機構結構示意圖。其中,驅動軸與減速機動力輸出端通過聯軸器連接。

圖5 輪對轉動驅動機構示意圖
2.5.3 探頭驅動機構及檢測位置的自動定位
車輪踏面及軸頸面探頭驅動機構是用來控制探頭上、下位置的。由于車輛輪對在檢修時輪徑尺寸和軸徑尺寸是有差別的,為了使探頭在每次檢測時都能處于最佳的測量高度,以確保探頭保持最佳的測量精度,所以需對探頭的上、下高度進行精確控制。圖6為探頭驅動裝置結構示意圖。其中:底板通過機體聯接座安裝在機架上;步進伺服電機座安裝在底板上;絲杠一端通過聯軸器與步進伺服電機連接,絲杠通過前、后支撐安裝在底板上,絲母底板安裝在直線導軌上;直線導軌端部安裝有探頭組件。由步進伺服電機驅動絲杠、絲母傳動機構,通過絲母、絲母座帶動直線導軌移動,從而實現探頭的移動。

圖6 探頭驅動裝置結構示意圖
檢測位置的自動定位是通過接近傳感器實現的。圖7為探頭及接近傳感器安裝示意圖。其中:探頭外殼與激光探頭支架安裝在探頭防護底板上,探頭防護底板與導向架固定連接;導向架與車輪踏面探頭組件豎向位移機構和軸頸部位探頭組件豎向位移機構的直線導軌滑動匹配連接;行程開關、接近傳感器安裝在導向架上;彈簧套裝在接近傳感器上,且彈簧的上端固定在導向架上,彈簧的下端安裝有移動板,移動板上的伸出端與行程開關正對設置。在尺寸檢測時當接近傳感器距離車輪踏面或軸頸面5~8 mm,控制激光傳感器探頭的自動定位,使之至檢測面處于55~75 mm的最佳檢測距離之內,確保檢測精度。設置行程開關的目的是防止接近傳感器故障時及時控制激光測距傳感器位置。

圖7 探頭及接近傳感器安裝示意圖
2.5.4 輪對推出機構
輪對推出機構主要是為了將測量后的輪對快速推出檢測工位,提高輪對檢測作業效率,減輕作業人員勞動強度而設置。
圖8為輪對推出機構結構示意圖。其中,推出油缸通過墊板安裝在機架上,推出臂設于推出桿上,推出桿前端與推出油缸活塞桿末端所設Y形接頭相鉸接,推出桿的后端通過轉軸活動鉸接在輪對后支撐塊的后側。
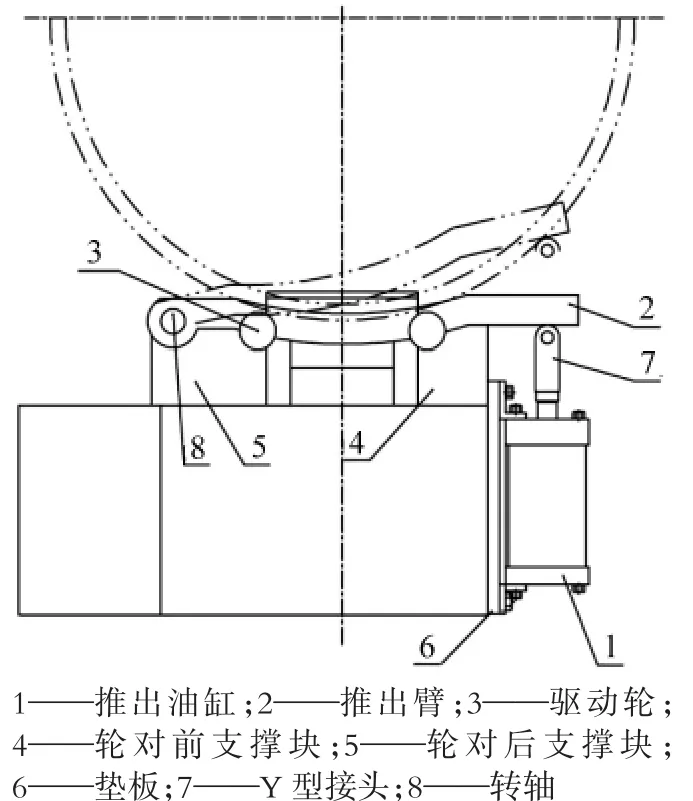
圖8 輪對推出機構示意圖
2.6 液壓控制系統
該自動檢測機還包括液壓控制系統。液壓控制系統如圖9所示。其主要是通過三通連接的主管路、2條支管路與夾緊油缸和推出油缸分別連接;在主管路上設有油過濾器、過濾減壓油霧三聯件;在支管路上分別設有五通小型電磁換向閥和減壓閥。通過控制夾緊油缸和推出油缸,實現對輪對的夾緊和推出控制。

圖9 液壓控制系統
3 使用效果
使用效果表明:①檢測過程中液壓控制系統能夠實現對輪對軸向夾緊的定位控制;②檢測完成后液壓控制系統能夠實現對輪對的自動推出控制;③在檢測過程中能夠實現根據輪徑和軸徑尺寸的不同對探頭的檢測位置自動定位,確保激光測距探頭處于最佳的測量位置,從而保證設備能夠實現較高的檢測精度;④能夠根據控制系統設定的數據采集周期和頻率,實現測量數據的自動采集;⑤采用單片機通過相應軟件實現數據的自動處理和干擾數據的自動篩選,并能夠將處理數據發送至上位機進行顯示、儲存、打印和調取;⑥在輪對檢測過程中能夠實現將超出正常使用標準的檢測結果(超標位置和測量數據)進行報警和標識。
該項目的成功研制滿足了各型軌道交通車輛輪對輪-軸同心度的自動檢測,填補了國內輪-軸同心度自動檢測的空白,有效提高了檢測效率和檢測精度,為輪對加修提供了技術依據,對于有效提高旅客列車運行的安全性、平穩性具有極其重要的作用。
[1] 高向東,吳乃優,敖銀輝.鐵路車輛輪對自動檢測系統的研制[J].機車電傳動,2003(2):36.
[2] 俞太亮.地鐵車輛輪對尺寸在線檢測應用探討[J].設備管理與維修,2014(7):70.
[3] 王長庚,邢宗義,黃文.一種新的地鐵車輛輪對尺寸在線檢測系統[J].鐵路計算機應用,2016(5):62.
[4] 陳光雄,崔曉璐,王科.高速列車車輪踏面非圓磨耗機理[J].西南交通大學學報,2016(12):244.
[5] 李海玉,程曉卿.基于激光位移傳感器的城市軌道交通車輛輪對尺寸在線檢測系統[J].城市軌道交通研究,2016(9):10.
[6] 陳靜,禹建偉,譚志忠.地鐵車輛輪對動態檢測系統研究[J].城市軌道交通研究,2014(7):82.
Development of the Automatic Detector for Wheel and Shaft Concentricity in Rail Transit Vehicle
LU Guiyun,WANG Sujiao
Aiming at the problems of traditional detecting machines that can not measure rapidly and accurately the wheel and axle shaft concentricity in rail transit vehicles,a special testing machine for wheel and shaft concentricity is designed.In this paper,the principle of concentricity detection and the structural design of key components are described in detail.The structure of the new detector is simple and practical,it can rapidly and accurately detect the vehicle wheel shaft concentricity,greatly improve the detection accuracy and efficiency,thus solving the difficult technical problems and providing the basis for wheel set measurement and repair.This detector could also ensure the safety of vehicle running and steadiness,improve the comfort of passengers.
rail transit vehicle;wheel set;wheel and shaft concentricity;automatic detector
U270.33
10.16037/j.1007-869x.2017.11.002
First-author′s address Zhengzhou Railway Vocational and Technical College,450052,Zhengzhou,China
*河南省科學技術廳2015年高新技術研究項目(152102210232)
2017-04-10)
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
海峽科技與產業(2016年3期)2016-05-17 04:32:12