摩擦式提升機(jī)減速點(diǎn)距離設(shè)定方法研究與應(yīng)用
2017-11-13 06:49:50齊衛(wèi)東
中國(guó)煤炭 2017年10期
齊衛(wèi)東 趙 強(qiáng) 張 浩
(1.棗莊礦業(yè)集團(tuán)公司蔣莊煤礦,山東省滕州市,277519; 2.棗莊礦業(yè)集團(tuán)公司供電工程處,山東省棗莊市,277000)
★ 煤炭科技·機(jī)電與信息化★
摩擦式提升機(jī)減速點(diǎn)距離設(shè)定方法研究與應(yīng)用
齊衛(wèi)東1趙 強(qiáng)1張 浩2
(1.棗莊礦業(yè)集團(tuán)公司蔣莊煤礦,山東省滕州市,277519; 2.棗莊礦業(yè)集團(tuán)公司供電工程處,山東省棗莊市,277000)
對(duì)摩擦式提升機(jī)減速點(diǎn)距離設(shè)定現(xiàn)狀進(jìn)行了分析總結(jié),以升降人員時(shí)自由減速度取0.75 m/s2和升降物料時(shí)自由減速度取1.2 m/s2為上限作為超調(diào)數(shù)據(jù),提出以自由減速度計(jì)算設(shè)定減速點(diǎn)距離方法和以基于自由減速度為主的自由減速控制模式,改善了摩擦式提升機(jī)減速段控制性能。
副井提升機(jī) 自由減速度 提升負(fù)荷 減速點(diǎn)距離可變 變位質(zhì)量
我國(guó)煤礦主提升機(jī)電控系統(tǒng)經(jīng)歷了有接點(diǎn)模擬繼電器控制和無(wú)接點(diǎn)數(shù)字化計(jì)算機(jī)控制兩個(gè)過(guò)程。無(wú)接點(diǎn)數(shù)字化計(jì)算機(jī)控制系統(tǒng)較早期電控產(chǎn)品具有更高的可靠性和低故障率,但數(shù)字化計(jì)算機(jī)電控系統(tǒng)在控制策略上只是用計(jì)算機(jī)程序取代繼電器接點(diǎn),先進(jìn)控制策略并沒(méi)有得到應(yīng)用。尤其是在減速點(diǎn)減速距離設(shè)計(jì)上,仍然按照固定距離設(shè)定原則,即提升容器上行至停車終端一定距離時(shí),減速開(kāi)關(guān)發(fā)出減速信號(hào),然后提升機(jī)減速、爬行至終端停車。這種控制策略應(yīng)用于副井提升負(fù)荷變化較大的工況下,具有明顯的局限性。
1 摩擦式提升機(jī)減速點(diǎn)距離設(shè)定現(xiàn)狀分析
煤礦摩擦式提升機(jī)在減速點(diǎn)設(shè)定規(guī)范上,一般采用固定減速點(diǎn)距離設(shè)定方法,提升機(jī)運(yùn)行到設(shè)定的減速點(diǎn)距離后,機(jī)械或電磁開(kāi)關(guān)向提升機(jī)電控系統(tǒng)發(fā)出減速信號(hào),提升機(jī)綜合系統(tǒng)給定速度和實(shí)際速度的差值信號(hào),調(diào)節(jié)正負(fù)制動(dòng)力矩,使提升機(jī)產(chǎn)生滿足要求的減速度,實(shí)現(xiàn)提升機(jī)減速、爬行至終端停車。由于副井提升機(jī)提升負(fù)荷變化大,尤其是減速度較小的情況下,提升機(jī)容易出現(xiàn)跳閘停車事故,影響提升機(jī)的安全運(yùn)行。
1.1 基于固定距離的減速點(diǎn)設(shè)定分析
主井摩擦式提升機(jī)箕斗采用定重裝載方式,摩擦滾筒兩側(cè)張力差值恒定,提升負(fù)荷性質(zhì)單一,在減速點(diǎn)距離設(shè)定上,適用于固定距離設(shè)計(jì)。而副井摩擦式提升機(jī)主要依靠人工調(diào)節(jié)罐籠負(fù)荷張力差值不超過(guò)允許張力差值,提升負(fù)荷性質(zhì)變化大,系統(tǒng)變位質(zhì)量也跟隨變化大。如果減速點(diǎn)距離采用固定距離設(shè)定原則,提升重載時(shí),自由減速度較大,會(huì)發(fā)生爬行距離加大現(xiàn)象,提升機(jī)運(yùn)行經(jīng)濟(jì)性差;提升輕載時(shí),因減速度較小,如果沒(méi)有可靠的負(fù)力制動(dòng),會(huì)發(fā)生爬行距離減小以至于跳閘停車現(xiàn)象,提升機(jī)運(yùn)行安全性差。因此,副井摩擦式提升機(jī)應(yīng)根據(jù)提升負(fù)荷大小,與等速段速度相結(jié)合,采用減速點(diǎn)距離設(shè)定隨機(jī)可變控制策略。
1.2 基于提升速度的可變減速點(diǎn)設(shè)定分析
目前,煤礦提升機(jī)電控系統(tǒng)普遍選用了以可編程控制器為核心的控制器件,為提升機(jī)提供了靈活多變的控制邏輯模式。有些煤礦在提升機(jī)減速點(diǎn)距離設(shè)定上采用了跟隨速度變化而變的技術(shù)方案,其主要方案是通過(guò)PLC采集提升機(jī)旋轉(zhuǎn)信號(hào),折算提升機(jī)速度和行程,然后根據(jù)公式(1),計(jì)算出提升機(jī)減速段行程S,減速段行程S加上爬行距離即得到減速點(diǎn)距離,以此距離發(fā)出減速信號(hào),實(shí)現(xiàn)減速點(diǎn)距離可變。

(1)
式中:vt——等速段速度,m/s;
v0——爬行段速度,m/s;
a——減速度,為預(yù)先設(shè)定的固定數(shù)值,具有不變性,m/s2。
基于提升機(jī)等速段速度變化而設(shè)定可變的減速點(diǎn)距離方案,只是根據(jù)提升機(jī)等速段速度的不同改變了減速點(diǎn)距離的設(shè)定,和提升機(jī)提升負(fù)荷沒(méi)有關(guān)系。一般摩擦式提升機(jī)運(yùn)行過(guò)程中,除下放爆炸物品等特殊物品要求限制速度外,為保證其運(yùn)行經(jīng)濟(jì)性,摩擦式提升機(jī)等速段運(yùn)行速度都要達(dá)到其設(shè)計(jì)的最大額定速度。也就是說(shuō),排除下放爆炸物品等有要求限速的特殊物品外,摩擦式提升機(jī)根據(jù)等速段速度設(shè)定減速點(diǎn)距離信號(hào)仍然是按照固定距離設(shè)定減速點(diǎn)距離,具有一定的局限性。
2 基于提升負(fù)荷的減速點(diǎn)距離設(shè)定方法分析
副井提升機(jī)一般分為兩種提升負(fù)荷工況,一是提升重載,即經(jīng)過(guò)一個(gè)提升循環(huán)過(guò)程后,兩個(gè)罐籠的負(fù)荷差值位能增加;二是下放重載,即經(jīng)過(guò)一個(gè)提升循環(huán)過(guò)程后,兩個(gè)罐籠的負(fù)荷差值位能降低。副井提升機(jī)提升負(fù)荷經(jīng)常變化,由此產(chǎn)生的自由減速度也是變化的。最大化實(shí)現(xiàn)提升機(jī)自由減速,自由減速度超限時(shí)適當(dāng)調(diào)制是副井提升機(jī)安全經(jīng)濟(jì)運(yùn)行的重要技術(shù)措施。《煤礦安全規(guī)程》(2016版)要求升降人員的提升機(jī)減速度不大于0.75 m/s2,《煤礦地面多繩摩擦式提升系統(tǒng)設(shè)計(jì)規(guī)范》(MT5021-1997)要求升降物料的提升機(jī)減速度不大于1.2 m/s2。在滿足摩擦式提升機(jī)防滑的條件下,提升機(jī)升降人員時(shí)減速度取0.75 m/s2,升降物料時(shí)減速度取1.2 m/s2。
2.1 減速點(diǎn)距離設(shè)定系統(tǒng)硬件組成
為實(shí)現(xiàn)副井提升機(jī)減速點(diǎn)距離可變,系統(tǒng)硬件主要由雙線制可編程控制器、雙相編碼器、罐籠張力檢測(cè)裝置、罐籠同步開(kāi)關(guān)和提升信號(hào)等組成,系統(tǒng)硬件組成如圖1所示。雙相編碼器分別與主滾筒和導(dǎo)向輪同軸安裝,分別計(jì)算提升機(jī)提升行程和換算速度,實(shí)現(xiàn)冗余比較;罐籠張力檢測(cè)裝置連接在提升鋼絲繩終端位置,利用無(wú)線發(fā)送原理傳輸,傳送到后臺(tái)計(jì)算機(jī)處理計(jì)算罐籠提升負(fù)荷;罐籠同步開(kāi)關(guān)安裝在距離上井口一定距離的井筒中,用來(lái)校正提升機(jī)行程誤差;提升信號(hào)輸入給雙線制可編程控制器,按規(guī)定點(diǎn)數(shù)判斷提升方向;雙線制可編程控制器為一對(duì)冗余的可編程控制器,是系統(tǒng)的主控制器,完成提升機(jī)自由減速度、減速點(diǎn)距離等數(shù)據(jù)計(jì)算,向提升機(jī)電控系統(tǒng)發(fā)送制動(dòng)力矩調(diào)制信號(hào)。

圖1 減速點(diǎn)距離設(shè)定系統(tǒng)硬件組成
2.2 減速點(diǎn)距離設(shè)定方法實(shí)現(xiàn)
通過(guò)采集提升機(jī)兩個(gè)罐籠的負(fù)荷值m1、m2及負(fù)荷差值,根據(jù)提升機(jī)系統(tǒng)變位質(zhì)量M,計(jì)算出提升機(jī)自由減速度a:

(2)
式中:a——提升機(jī)自由減速度,m/s2;
m1——提升機(jī)1號(hào)罐籠負(fù)荷值,kg;
m2——提升機(jī)2號(hào)罐籠負(fù)荷值,kg;
M——提升機(jī)系統(tǒng)變位質(zhì)量,kg;
g——重力加速度,m/s2。
提升機(jī)1號(hào)和2號(hào)罐籠負(fù)荷值m1、m2變化,則a變化;a變化,則減速段行程S變化;減速段行程S加上爬行距離,即得到減速點(diǎn)距離,以此距離設(shè)定減速點(diǎn)距離,實(shí)現(xiàn)減速點(diǎn)距離可變?cè)O(shè)定。
2.3 減速點(diǎn)距離設(shè)定后控制方案
提升機(jī)無(wú)論提升重載還是下放重載,只要任何一個(gè)罐籠乘坐人員,系統(tǒng)均按0.75 m/s2作為最大減速度輸出調(diào)制制動(dòng)力矩信號(hào)。
2.3.1 提升機(jī)提升重載控制方案
提升機(jī)如接收到升降人員信號(hào),當(dāng)自由減速度大于0.75 m/s2時(shí),以0.75 m/s2減速度換算出減速點(diǎn)距離信號(hào),同時(shí)輸出調(diào)制正力力矩信號(hào),使摩擦式提升機(jī)以0.75 m/s2減速度減速運(yùn)行;當(dāng)自由減速度小于或等于0.75 m/s2時(shí),以自由減速度換算減速點(diǎn)距離信號(hào),提升機(jī)以自由減速度減速運(yùn)行。如接收到升降物料信號(hào)時(shí),當(dāng)自由減速度大于1.2 m/s2時(shí),以1.2 m/s2減速度換算出減速點(diǎn)距離信號(hào),同時(shí)輸出調(diào)制正力力矩信號(hào),使提升機(jī)以1.2 m/s2減速度減速運(yùn)行;當(dāng)自由減速度小于或等于1.2 m/s2時(shí),以自由減速度換算出減速點(diǎn)距離信號(hào),提升機(jī)以自由減速度減速自由運(yùn)行。
2.3.2 提升機(jī)下放重載控制方案
提升機(jī)如接收到升降人員信號(hào)時(shí),以0.75 m/s2減速度換算出減速點(diǎn)距離信號(hào),同時(shí)輸出增大調(diào)制負(fù)力力矩信號(hào),使摩擦式提升機(jī)以0.75 m/s2減速度減速運(yùn)行;如接收到升降物料信號(hào)時(shí),以1.2 m/s2減速度換算出減速點(diǎn)距離信號(hào),同時(shí)輸出增大調(diào)制負(fù)力力矩信號(hào),使摩擦式提升機(jī)以1.2 m/s2減速度減速運(yùn)行。
2.4 減速點(diǎn)距離設(shè)定控制流程圖
系統(tǒng)打開(kāi)電源后首先進(jìn)行初始化,然后系統(tǒng)不斷讀取提升機(jī)罐籠提升負(fù)荷數(shù)據(jù),接收到開(kāi)車信號(hào)后,系統(tǒng)以接收到開(kāi)車信號(hào)前的罐籠提升負(fù)荷數(shù)據(jù)作為最終負(fù)荷數(shù)據(jù),同時(shí)更新提升系統(tǒng)變位質(zhì)量,計(jì)算提升機(jī)自由減速度。系統(tǒng)根據(jù)接收到的開(kāi)車信號(hào),判斷升降人員或物料狀態(tài)和提升重載或下放重載性質(zhì),按照不同的控制策略運(yùn)行,控制流程如圖2所示。
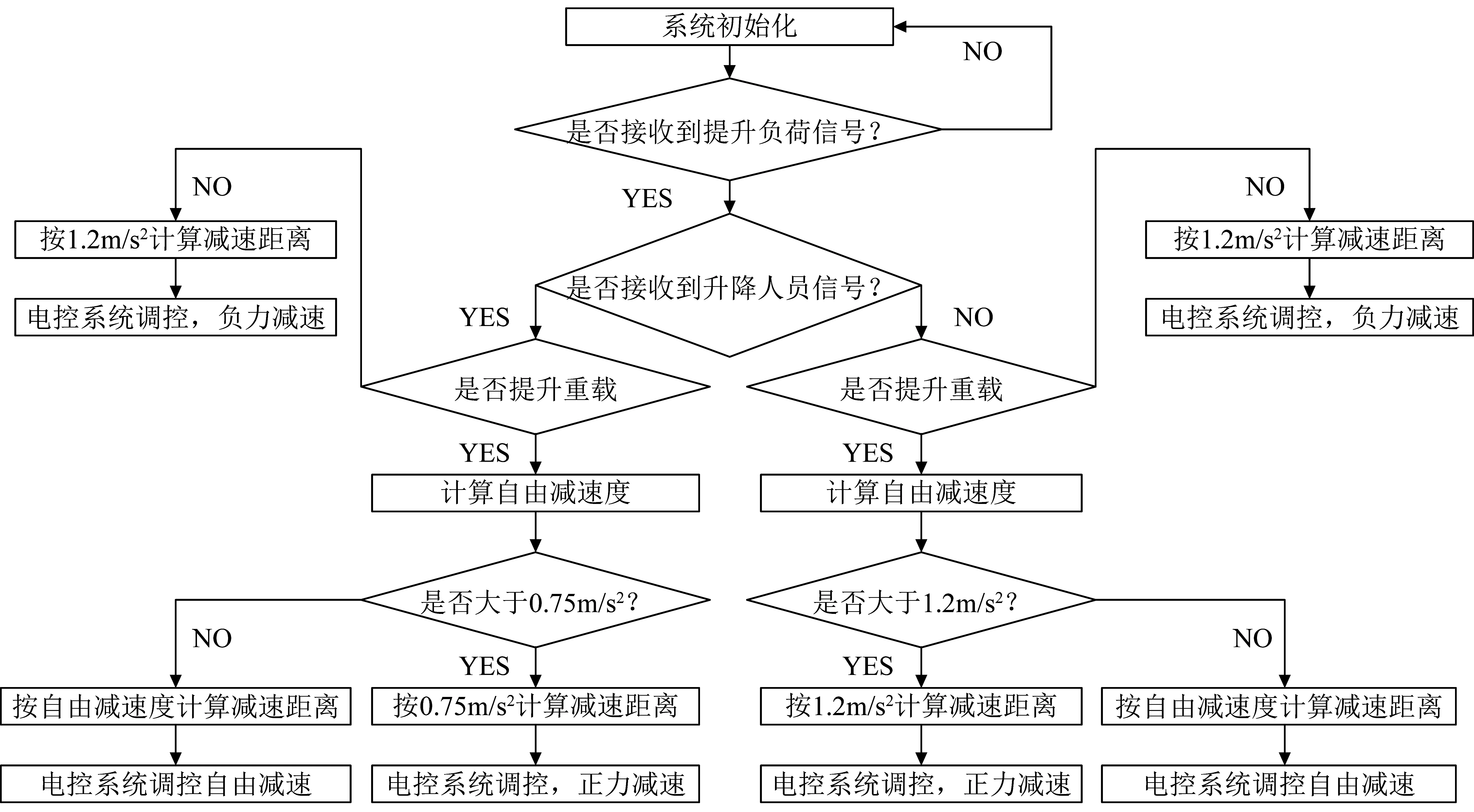
圖2 減速點(diǎn)距離設(shè)定控制流程圖
3 結(jié)語(yǔ)
目前,煤礦副井摩擦式提升機(jī)減速點(diǎn)距離設(shè)定普遍采取固定距離設(shè)定方法,對(duì)于提升負(fù)荷變化較大的副井摩擦式提升機(jī)而言,在固定減速點(diǎn)距離下,把變化的自由減速度調(diào)制為一個(gè)恒定的減速度,不僅難以調(diào)節(jié),而且影響副井摩擦式提升機(jī)運(yùn)行的安全經(jīng)濟(jì)性。結(jié)合摩擦式提升機(jī)等速段速度,根據(jù)不同提升負(fù)荷采用可變化的減速點(diǎn)距離設(shè)定方法,實(shí)現(xiàn)摩擦式提升機(jī)防滑安全 條件下自由減速控制,是副井摩擦式提升機(jī)優(yōu)先選用的技術(shù)方案。
[1] 崔成寶,趙強(qiáng),徐磊等.副井摩擦式提升機(jī)鋼絲繩張力差監(jiān)控系統(tǒng)研究[J].煤礦機(jī)械,2009(7)
[2] 趙強(qiáng).主井摩擦式提升機(jī)防重載下放關(guān)鍵技術(shù)研究[J].煤礦機(jī)械,2012(9)
[3] 王瀚哲.煤礦副井提長(zhǎng)機(jī)整流器網(wǎng)側(cè)諧波分析與治理[J].中國(guó)煤炭,2015(5)
[4] 肖棟軍.徐杏娟.張軍峰.基于PLC的礦井提升機(jī)變減速點(diǎn)的應(yīng)用[J].電氣傳動(dòng)自動(dòng)化,2013(6)
[5] 國(guó)家安全生產(chǎn)監(jiān)督管理總局.煤礦安全規(guī)程[S].北京:煤炭工業(yè)出版社,2016
Researchandapplicationoffrictionhoistdecelerationpointdistancesettingmethod
Qi Weidong1, Zhao Qiang1, Zhang Hao2
(1. Jiangzhuang Mine, Zaozhuang Mining Industry Group Limited Company, Tengzhou, Shandong 277519, China;2. Power Supply Engineering Department, Zaozhuang Mining Industry Group Limited Company, Zaozhuang, Shandong 277000, China)
The current situation of the deceleration point of friction hoist was analyzed and summarized. Taking 0.75 m/s2of free deceleration speed when hoisting persons and 1.2 m/s2when hoisting materials as overshoot data, proposing a calculation method for deceleration point distance based on free deceleration speed and free deceleration control mode based on free deceleration speed, which could improve control performance of friction hoist in slowdown period.
auxiliary shaft hoist, free deceleration speed, hoist load, variable deceleration point distance, equivalent mass
齊衛(wèi)東,趙強(qiáng),張浩.摩擦式提升機(jī)減速點(diǎn)距離設(shè)定方法研究與應(yīng)用[J].中國(guó)煤炭,2017,43(10):88-90,136.
Qi Weidong, Zhao Qiang, Zhang Hao.Research and application of friction hoist deceleration point distance setting method[J]. China Coal, 2017,43(10):88-90,136.
TD534
A
齊衛(wèi)東(1969-),男,山東單縣人,工程碩士,高級(jí)工程師,從事煤礦安全工程管理與技術(shù)研究工作。
(責(zé)任編輯 張艷華)
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
中國(guó)生殖健康(2019年3期)2019-02-01 06:12:26
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
鑿巖機(jī)械氣動(dòng)工具(2016年3期)2016-03-01 04:00:25