基于北斗導航的植保無人機定位設計
2017-11-08 22:23:31王高亮王強羅嘉偉孫曉紅
智能計算機與應用 2017年5期
王高亮+王強+羅嘉偉+孫曉紅

摘要:農用植保無人機是農業植保領域的重要設備,具有效率高、運行費用低的特點,已經逐漸取代了人工植物保護,成為農業植保領域的中流砥柱。研發和制作出高精度的基于北斗導航植保無人機定位系統是將來農業植保無人機推向市場的重要沖破點。長期以來則一直是各大高校研究的熱點,且在實際使用過程中獲得了長足的發展。GPS是應用在多旋翼無人機上完成獨立飛行的普遍使用方式。而國內的BDS定位體系是在GPS、“格雷納斯”、“伽利略”衛星導航系統之后,由本國自主研發、擁有全部知識產權,穩定覆蓋亞太地區的一種全新定位方式。
關鍵詞: 植保無人機; 北斗定位系統; GPS 定位; BDS定位
中圖分類號: TP391
文獻標志碼:A
文章編號: 2095-2163(2017)05-0046-04
Abstract:Agricultural plant protection unmanned aerial vehicle (UAV) is an important equipment in the field of agricultural plant protection,which has the characteris of high efficiency and low operating cost. It has gradually replaced the artificial plant protection and become the mainstay of the field of agricultural plant protection. Development and production of highprecision plant protection unmanned aerial vehicle based on Beidou navigation would be an important breakthrough point for agricultural plant protection unmanned aerial vehicle coming into the market. And the topic has been a major focus of research for a long time,meanwhile obtained the considerable development in the process of actual use. GPS is a common way to achieve autonomous navigation in multi rotor UAV. Following GPS, "Geleinasi", "Galileo" satellite navigation system, the BDS positioning system is a new positioning method of stability in the AsiaPacific region, independently researched and developed with all the intellectual property rights in China.
Keywords: plant protection unmanned aerial vehicle; Beidou positioning system; GPS positioning; BDS positioning
0引言
多旋翼無人機是機器人學中的一個重要分支,重點強調了無人機的自主移動能力,比固定的機器人面臨著更為復雜的不確定性環境,但同時也具有更大的靈活性、活動范圍和應用領域。本項目使用河南嘉科智能控制科技有限公司的多旋翼植保無人機,用于研究無人機的定位技術,制作了基于北斗全球衛星導航系統(BDS)的多旋翼無人機定位系統與多旋翼無人機衛星監控軟件,并且在戶外做了區間定位性能檢測。
本文結合BDS的構成,從抵觸理論上演算了全球衛星定位的可行性,做了仔細的誤差分析。設計了BDS定位程序,成功獲得了植保無人機實時的經度、緯度、時間、高度。設計了R485通訊與建立地圖的核心部位功能解算方法,初步實現了良好的人機交互。使用無線數據傳達信息的方式實現植保無人機與操作者的監控軟件通訊,這樣可以極易控制無人機。另外比較了北斗導航與GPS的可見衛星的數量、空間分布、精度的因素,靜態定位精度,提升了植保無人機的自動化水平,為后續的科研奠定了良好的實施基礎。
1無人機研究背景及意義
多旋翼無人機在無人機家族中具有承上啟下的作用,同時具有極強的垂直起降的功能,且制造成本低,操作簡單等優點,在生產生活中發揮了極大的價值。無人機自主導航問題歸結對“where am I?”,“What does the world looks like?”,“where do you want to go?”和“How do I get there?” 等4個基本問題的解答。因此,機器人定位、建模制圖、運動控制、路徑規劃是無人機導航定位任務必須解決的四大技術,只有在此基礎上才能進一步開展優化設計研究等[1]。
BDS是世界上目前為止能獨立運行的全球四大衛星導航家族之一,而且全部都是由中國科學家們獨立操刀設計和正在施工建造的全球導航系統。本課題研究多旋翼無人機的定位技術,基于北斗導航的多旋翼植保無人機定位模塊和多旋翼無人機地面站。多旋翼植保無人機在農藥噴灑、植保飛防等領域有很大的優勢,在實際操作中還有很多不穩定的因素,最主要問題就是,如何獲得準確的定位坐標[2]。
2無人機定位技術分析
2.2GPS定位endprint
美國的GPS[6-7]是全球使用范圍最廣、性能最穩定的系統。GPS 系統主要由空間段、地面段和用戶段等3部分構成。各個軌道面上的每一個衛星都是分散發布的;每一條空間軌跡的傾斜角度計為 60°;6個升集合點等間隔配置,即每一個平面的升交點的赤經有60°的誤差;這種空間衛星分布的另一個優點是確保至少有4顆衛星在世界任何地方和任何地點被觀測到,特別是在高緯度地區。地面段主要由 1 個主控站、6 個監測站和 4 個注入站組成。地面段為個人 GPS接收機,接收機的根本作用是回收GPS回傳調制信號、解析電報和運行導航數據,為地面端發送時間、位置坐標和測速服務。
中國在1994年建成了第一代北斗系統。GPS的操作方式十分簡易,用戶攜帶一臺GPS接收機就可使用其提供的免費服務,但是授權服務是收費的[8]。美國的GPS一共提供2種信號,即C/A 碼和僅驗證后才能使用的P碼。第一個C/A 碼是完全免費的,操作簡單,目前的定位準確度在以100 cm為半徑的圓面積;第二種P碼就是直接使用在國防等高準確度要求環境下。在2000年以前歐美科學家就在第一種信號中人為地夾雜了選擇性誤差算法,即SA 戰略,這就是第一種信號的準確度極差的原因,其定位的坐標偏差有的會在上百米以上,之所以要加入誤差算法的目地是拒絕其他國家對GPS信號進行惡意干擾;2000年之后,美國才撤除SA 戰略,第一種信號才有了今天的GPS高精度數據。
3北斗導航定位理論基礎
3.1BDS 空間衛星星座
BDS 采用的是混合空間的星座,與其他國家的衛星系統有著根本性的差別。其在太空內由5枚靜止的軌道衛星和30枚非靜止軌道衛星共35枚導航衛星構成;30枚的非靜止軌道衛星包括3枚地球異步平直軌道衛星和27枚地球中間軌道導航衛星,27枚分布傾角為55°。這樣,衛星星座可以由3個不同軌道高度的衛星集結表征,能彌補MEO衛星隨著時間推移的功能欠缺,在中國,將可以有效地提升國內區域星座布局的整體運行態勢。可為中國與周邊國家的高準確的坐標提供全天候服務。如圖2所示。
3.2BDS 地面端
BDS的地面控制系統一共是由3個模塊組成,1 個主控站、2 個注入站、30 個監測站。
監測站實時跟蹤掌控衛星監測站和臨近空間的工作狀態、地理環境變化,將監控信息發送到主站。
主站監控站接收和處理數據的發送,待衛星導航電文和星歷數據發送到主站后,還負責監測站和注入站的管理,確保BDS的正常運行。
注入站在主控站的制約下,對導航數據進行控制管理,將衛星電報、衛星星歷、差分數據等注入到衛星的數據保存系統中,并在分析監測注入的信息后判斷是否正常。
4基于BDS的無人機定位系統總體設計
本研究所使用的植保無人機平臺是河南嘉科智能控制科技有限公司自主研發的一款多旋翼植保無人機。具有農田噴灑農藥、病蟲害檢測等功能。該多旋翼植保無人機的外觀如圖3所示。
4.1植保無人機體系構造
本課題所設計的多旋翼無人機定位系統按照功能可以劃分為兩大部分:上位機系統、多旋翼無人機的硬件系統。而多旋翼無人機的硬件系統又可分為3層。具體闡釋如下。
首先,最頂層為嵌入式 Linux系統層。多旋翼植保無人機上連接的地面端可以顯示多旋翼植保無人機當前各個模塊的運行狀態和參數,用戶可以按照需求設置相關飛行參數、多旋翼植保無人機的默認參數,該層也稱為人機交互層。
其次,中間層使用了意大利ST公司的STM32F427VIT6處理器。該處理器是一個32位微型控制器,是ARM Cortex—M4的內核,超頻工作可到159 MHz,并擁有內存直接訪問DMA(direct memory access)選項和浮點運算單元,能在外界干預的環境下迅速進行浮點解算,為無人機提供了工業級的穩定性和安全性。主要負責飛行算法處理,例如多旋翼無人機飛行角度控制處理;多傳感器的信息融合,將底層傳感器采集的信息在操作處理后傳輸至最頂層或反饋到底層,使多旋翼無人機轉換為對應的飛行狀態。
第三,最底層,即STM32F405RGT6微處理器,主要負責傳感器采集信息層,重點包括:BDS定位單元、電機控制單元、數據傳輸單元等。
4.2北斗導航定位模塊
植保無人機上衛星導航定位模塊采用的是和芯星通公司生產的UM 220 型芯片,圖4是 UM220 測試板。和芯星通UM220是雙系統高性能GNSS模塊,多頻率高性能S2C芯片,能夠極易完成接收BD2 B1、GPS L1兩個頻點。UM220外形尺寸緊湊,采用SMT焊盤,適用于低成本、低功耗領域。
性能指標:尺寸16*12.2*2.4 mm,工作溫度-40 ℃~85 ℃,擁有2個UART,首次定位冷啟動需要30 s,熱啟動需
4.3微處理器模塊
微處理器模塊如圖5所示。
微處理器模塊性能參數:ARM-Cortex M4架構,32位處理器,工作頻率169 MHz,196 KB的RAM,64引腳,采用LQFP封裝,嵌入式接口類型豐富,共有CAN、I2C、SPI、USRT、USART、USB 6種類型。
4.4控制系統軟件設計
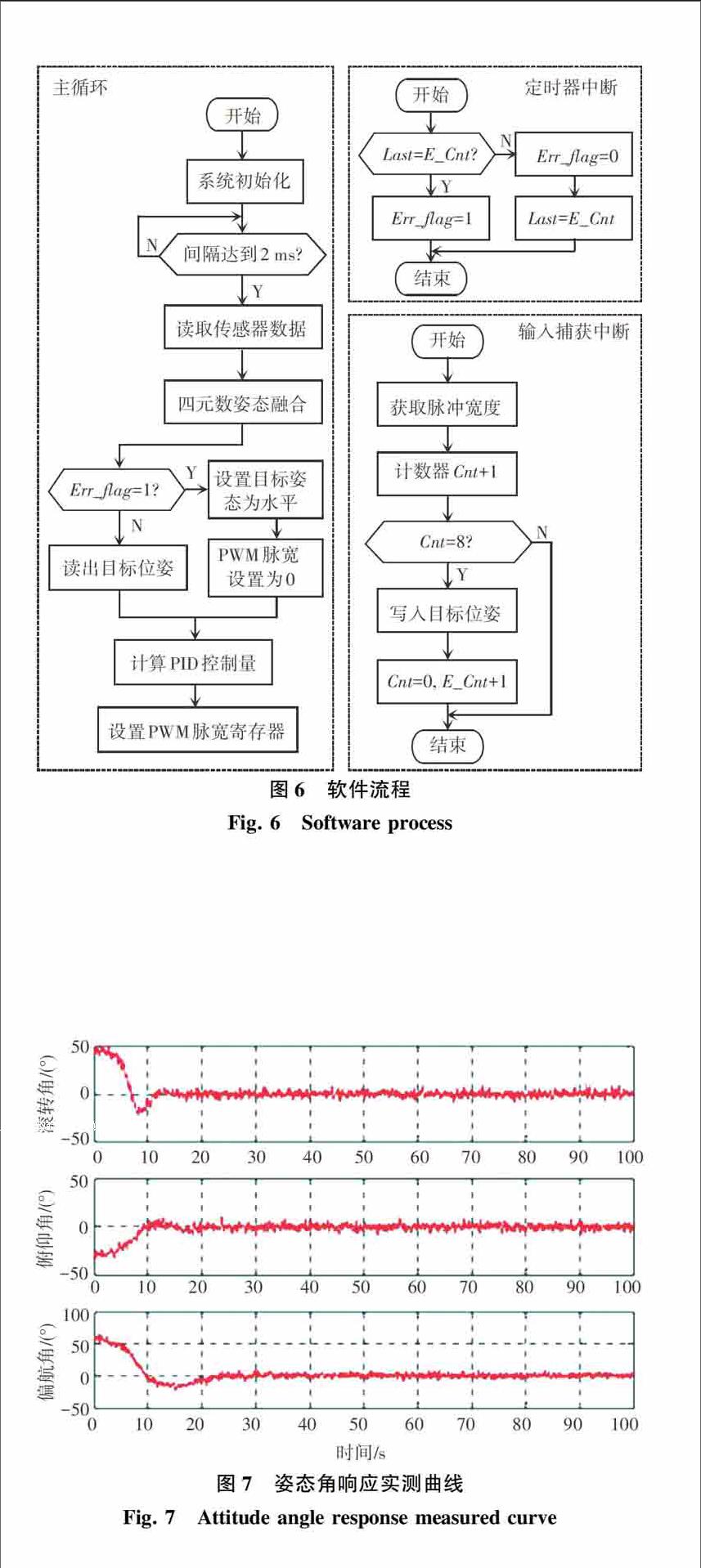
控制軟件的核心任務是為無人機飛行角度的獲取及把控、地面發射機數據解算、通信連接狀態實時處理。與功能相對應,[JP4]將植保無人機的控制軟件大致劃分為3組。軟件流程如圖6所示。
第l組采用了微型處理器的高級IO捕獲口,捕獲中斷程序中的遙控器S-BUS數據。采用180 Hz 作為無人機飛行角度控制頻率,完成對傳感器的數據的處理,再由IO口以PWM的形式傳輸給無人機的電子調速器,給多旋翼無人機的電機下指令,完成對無人機的操作動作。endprint
第2組是采用控制器的定時器斷點函數,每隔8 ms運行一次,自檢地面控制器數據的改變值。若斷點函數中的捕獲值與當前地面段的數據值不一致時,說明通信正常。如果一致的話,則清晰表明地面控制器已經對植保無人機失去了控制,這個時候應該馬上標定連接錯誤符,采取相應措施給植保無人機下達返航命令,并返回主函數。
第3組為主函數部分。大多數功能都在此函數中實現。系統啟動后首先初始化各個模塊。然后將每一個傳感器獲得的數據進行姿態解算,若此時無人機返回故障信號,應該立刻把植保無人機的飛行角度設置為水平,使其能保持垂直飛行。如果沒有接收失控信號,則應該繼續獲取輸入斷點代碼標識的無人機飛行狀態信號,解算相應的植保無人機控制算法得到控制量并調制成PWM數據,然后用DMA模塊將得到的無人機數據傳送至對應的子程序中,這樣即可調節植保無人機的電機轉速,達到最佳的調校結果。
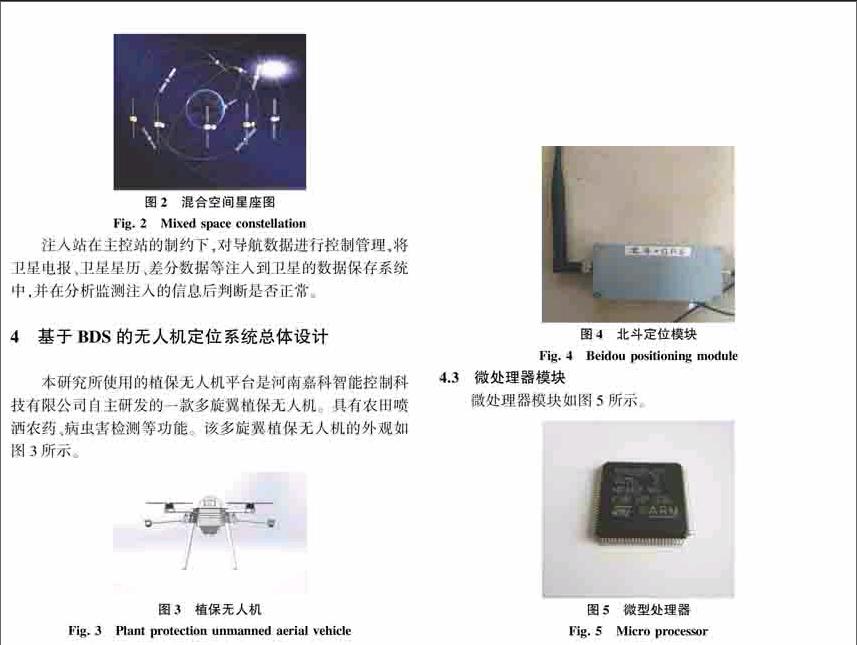
4.5實驗結果
[圖7為融合了BDS數據的無人機的姿態角響應實測曲線。由于實際系統存在響應時間,實測結果比仿真結果的動態響應時間略長一些。從圖7中可以看出,系統具有很好的動態響應和穩態響應,在存在外界干擾的情況下,仍能跟蹤期望的姿態。
5結束語
目前,多旋翼植保無人機定位導航技術,是無人機家族的一個重要分支。本文是設計基于BDS多旋翼植保無人機導航系統。本文的核心及創新之處包括以下幾個方面:
1)通過對BDS定位系統原理的研究,得出影響定位精度的因素。當用戶測距誤差一定時,測量精度主要取決于精度因子,并進行了定位誤差來源分析。
2)NMEA0183 是目前應用廣泛、成熟、可靠的衛星電文協議,其編程簡單,可以根據需要從不同的導航電文中提取有用的信息。本課題設計了BDS定位子程序,成功獲得了目標的經緯度、時間、海拔高度、多旋翼無人機速度以及衛星的空間分布等信息。
3)設計多旋翼植保無人機的定位系統,通過采用多傳感器和BDS系統的融合,使得植保無人機在戶外獲得了良好的定位效果。為將來的研究提供了堅實的基礎。
4)通過分析比較,并針對基于BDS 的多旋翼植保無人機定位系統進行了靜態定位與動態定位。研究可得,BDS系統基本滿足戶外定位要求,BDS導航系統在單獨定位時可以達到半徑為450 cm的圓面積內的定位準確度。
參考文獻:
李攀. 四旋翼直升機控制問題研究[D]. 哈爾濱:哈爾濱工業大學,2006.
[2] HOFFMANN C, HUANG Haomiao, WASLANDER S, et al. Quadrotor helicopter flight dynamics and control: Theory and experiment[C]//Proc. of the AIAA Guidance, Navigation, and Control Conference. South Carolina: AIAA, 2007:1-20.
[3] 王衛華,熊有倫,孫容磊. 測程法系統誤差的測量與校核[J]. 機器人ROBOT,2004,26(5): 454-460.
[4] 秦永元,張洪鉞,汪叔華. 卡爾曼濾波與組合導航原理[M]. 2版. 西安:西北工業大學出版社,2012.
[5] 袁斌. 一種改進的基于TDOA的三維多點定位技術[J]. 信息與電腦(理論版),2012(2): 164-166.
[6] 徐興,徐勝,劉永鑫,等. 小型無人機機載農藥變量噴灑系統設計[J]. 廣東農業科學,2014,41(9): 207-210.
[7] 張濤,楊殿閣,李克強,等. 車輛導航中帶匹配度反饋的模糊地圖匹配算法[J]. 清華大學學報(自然科學版),2009,49(2): 277-280.
[8] 趙琳,王小旭,丁繼成,等. 組合導航系統非線性濾波算法綜述[J]. 中國慣性技術學報,2009,17(1): 46-52,58.endprint
