載荷映射用于航天器振動試驗條件制定的方法
2017-11-07 05:40:41楊正璽丁昳婷汪陽豐任維佳張希農(nóng)
振動、測試與診斷 2017年5期
楊正璽, 丁昳婷, 汪陽豐, 陸 東, 任維佳, 張希農(nóng)
(1.中國科學(xué)院大學(xué) 北京,100190)(2.中國科學(xué)院空間應(yīng)用工程與技術(shù)中心,太空應(yīng)用重點實驗室 北京100094)(3.西安交通大學(xué)機械結(jié)構(gòu)強度與振動國家重點實驗室 西安,710049)
10.16450/j.cnki.issn.1004-6801.2017.05.013
載荷映射用于航天器振動試驗條件制定的方法
楊正璽1,2, 丁昳婷3, 汪陽豐1,2, 陸 東3, 任維佳3, 張希農(nóng)3
(1.中國科學(xué)院大學(xué) 北京,100190)(2.中國科學(xué)院空間應(yīng)用工程與技術(shù)中心,太空應(yīng)用重點實驗室 北京100094)(3.西安交通大學(xué)機械結(jié)構(gòu)強度與振動國家重點實驗室 西安,710049)
準確把握航天器振動試驗條件是實現(xiàn)航天器有效檢驗的前提。首先,通過典型柔性結(jié)構(gòu)試驗表明振動臺剛性邊界不同于真實環(huán)境的柔性邊界條件,導(dǎo)致結(jié)構(gòu)傳遞函數(shù)發(fā)生改變,說明如果以傳統(tǒng)的有效載荷界面加速度包絡(luò)作為試驗條件可能導(dǎo)致過試驗或欠實驗;然后,采用載荷映射方法,以響應(yīng)等效為目標,基于有限元模型,根據(jù)實際響應(yīng)與試驗邊界,采用數(shù)值優(yōu)化方法計算試驗邊界條件下的映射載荷;最后,以此來制定振動試驗條件。結(jié)果表明,載荷映射方法可以有效解決邊界條件不同可能引起的欠試驗問題,同時結(jié)合主動下凹方法或力限技術(shù)可以緩解有效載荷共振頻率處的過試驗現(xiàn)象。
振動環(huán)境試驗; 航天器; 響應(yīng)等效; 載荷映射
1 問題的引出
航天器從發(fā)射到入軌過程會經(jīng)歷振動、噪聲、沖擊和加速度等惡劣的動力學(xué)環(huán)境,可能導(dǎo)致航天器結(jié)構(gòu)破壞,性能降低或失效。振動環(huán)境試驗是模擬飛行環(huán)境、考察航天器結(jié)構(gòu)設(shè)計、工藝制造缺陷的重要環(huán)節(jié)。地面振動環(huán)境試驗是對真實振動環(huán)境的模擬,兩者的差別可能導(dǎo)致“欠試驗”或“過試驗”問題。“欠試驗”會導(dǎo)致航天器考核不足,產(chǎn)品帶著隱患上天,可能會造成發(fā)射失敗等嚴重事故,因而“欠試驗”是地面試驗中無法接受的。“過試驗”會導(dǎo)致航天器性能過保守,增加研制難度,造成重量、資源的浪費;更嚴重的是“過試驗”可能會造成航天器的潛在損傷甚至導(dǎo)致不必要的破壞,延長研制周期。為保證航天器順利發(fā)射,考慮到環(huán)境條件的隨機性,試驗條件需要有適當(dāng)余量,條件制定趨于保守,地面試驗通常面臨“過試驗”問題。我國未來空間站中有效載荷呈現(xiàn)“重、大、精”的特點,所受力學(xué)環(huán)境更加惡劣、抗力學(xué)環(huán)境能力更差,采用傳統(tǒng)的方法可能產(chǎn)生的“過試驗”已成為制約總體設(shè)計水平提高的瓶頸問題[1-2]。如何在避免“欠試驗”的前提下盡量減輕“過試驗”的程度,準確把握試驗環(huán)境條件制定方法,并合理優(yōu)化試驗條件,具有重要的現(xiàn)實意義。
結(jié)構(gòu)真實的振動環(huán)境與試驗環(huán)境的主要區(qū)別體現(xiàn)在載荷條件和邊界條件兩方面。真實環(huán)境為多軸載荷,目前在航天領(lǐng)域主流仍采用單軸試驗來模擬,從多軸到單軸的載荷簡化過程會帶來響應(yīng)差異,文中不展開討論。目前振動環(huán)境單軸試驗條件通常是對實測或分析的有效載荷安裝界面加速度進行包絡(luò)得到。考慮結(jié)構(gòu)的安裝及振動臺的控制能力,驗收級條件采用峰值平滑性包絡(luò);考慮結(jié)構(gòu)和飛行環(huán)境不確定性,鑒定級條件再放大一定倍數(shù)(正弦試驗1.5倍,隨機試驗4 dB)[3],圖1為工程中某有效載荷試驗條件[4],3條彩色曲線為試件不同響應(yīng)點載荷環(huán)境預(yù)示結(jié)果,直線為通過對預(yù)示結(jié)果平滑性包絡(luò)形成的試驗條件。平滑性包絡(luò)導(dǎo)致有效載荷共振點(即整體結(jié)構(gòu)動力吸振點[5])試驗條件嚴重放大。通過加速度和力的雙控可以有效減輕加速度動力吸振點的響應(yīng)放大[6-7]。試驗環(huán)境與真實環(huán)境的另一主要區(qū)別為邊界條件, 真實環(huán)境多為柔性邊界條件,而試驗多為剛性邊界條件,通過動力學(xué)理論可知,不同邊界的相同結(jié)構(gòu),在輸入譜完全一致的情況下結(jié)構(gòu)的響應(yīng)不同,可能欠試驗,也可能過試驗。由于邊界條件差異可能引起的欠試驗必須有效防止。
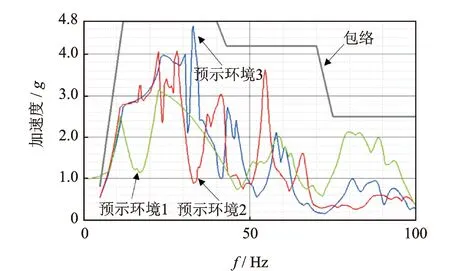
圖1 航天器振動試驗條件形式[4]Fig.1 Form of vibration test specification for spacecraft
實際工程中,結(jié)構(gòu)的破壞往往是響應(yīng)破壞,試驗環(huán)境對于真實環(huán)境的等效,本質(zhì)上是對其作用于結(jié)構(gòu)所產(chǎn)生的位移、加速度、應(yīng)力、應(yīng)變等響應(yīng)的等效,據(jù)此,提出將載荷映射思想[8]應(yīng)用于航天器試驗環(huán)境條件設(shè)計中,即以結(jié)構(gòu)在試驗和真實環(huán)境中的響應(yīng)等效為設(shè)計目標,以試驗中能夠?qū)崿F(xiàn)的加載方式為設(shè)計邊界條件,得到試驗中應(yīng)當(dāng)施加的載荷條件,從而消除邊界條件的不同可能導(dǎo)致的響應(yīng)差異。
2 基本原理和方法
2.1 基本原理
載荷映射方法的原理如圖2所示。利用實測、分析或統(tǒng)計方法得到結(jié)構(gòu)在真實振動環(huán)境下的響應(yīng)。依據(jù)一定的等效準則確定試驗環(huán)境下應(yīng)當(dāng)達到的響應(yīng)或響應(yīng)范圍,同時依據(jù)試驗中能夠施加的邊界條件,對參與試驗的結(jié)構(gòu)進行數(shù)值建模,由此反推出試驗環(huán)境下應(yīng)當(dāng)施加的載荷,由于其形式不同于真實環(huán)境下的載荷,稱其為“映射載荷”。
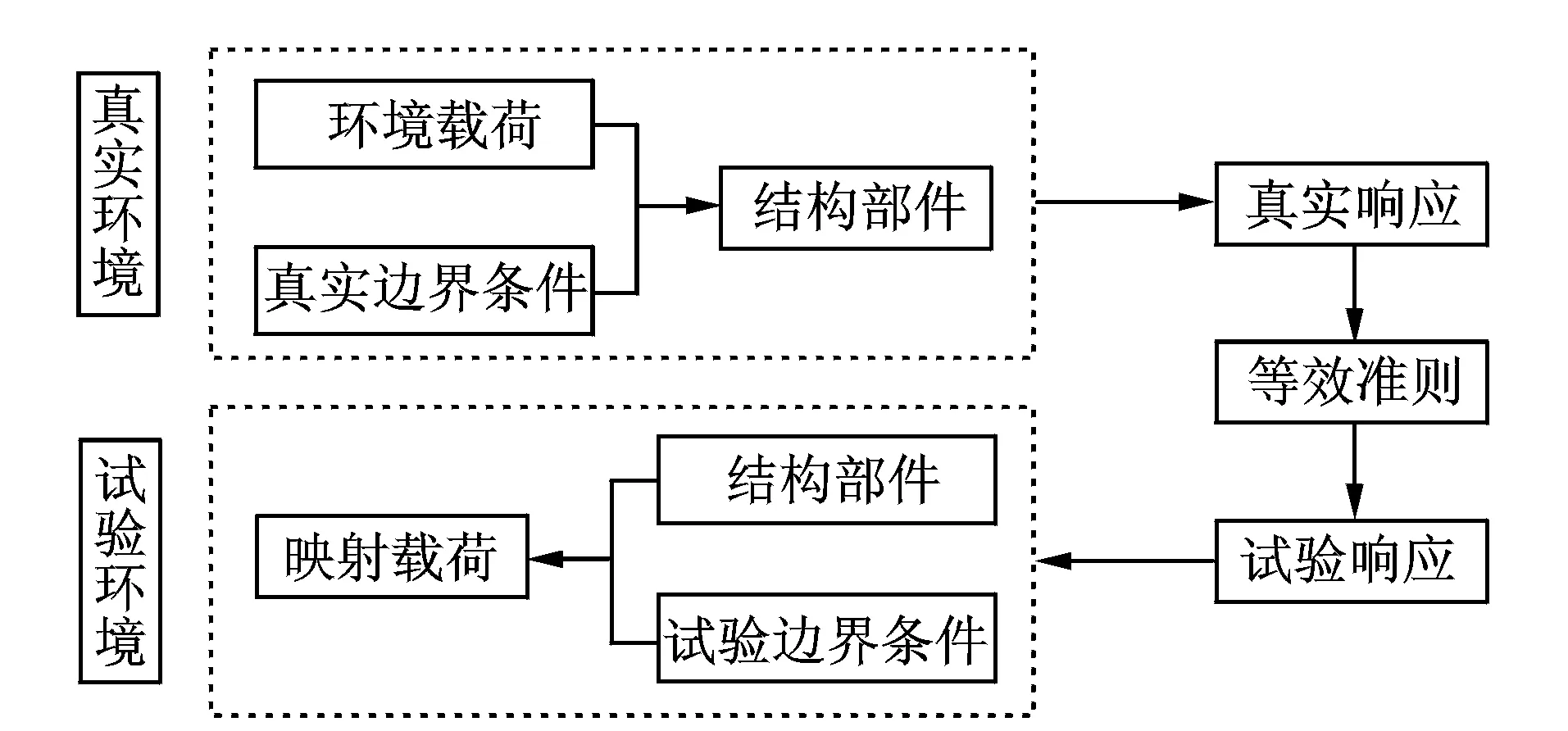
圖2 載荷映射方法基本原理Fig.2 Basic concept of Load Mapping Method
航天器力學(xué)試驗有效性要求結(jié)構(gòu)響應(yīng)在高于真實的前提下,兩者最大位移、最大應(yīng)力相差不大,所發(fā)生的部位相同,其他部位的應(yīng)力、應(yīng)變水平相當(dāng)[9],因此在本研究中,參照力學(xué)環(huán)境試驗有效性要求及建模方法、測量、加載設(shè)備條件限制,等效準則確定為:試驗中有效載荷各個關(guān)鍵部位的關(guān)鍵自由度上位移或加速度響應(yīng)在均大于真實環(huán)境的前提下,與真實響應(yīng)差值向量的模取最小值。基于以上準則,建立載荷映射的基本模型如下:
1) 試驗邊界條件為除單向加速度加載外其余方向均固定,即單軸基礎(chǔ)激勵;
2) 建模方法為有限元方法;
3) 根據(jù)等效準則與實際響應(yīng)優(yōu)化計算映射載荷的方法為遺傳優(yōu)化算法,采用MATLAB優(yōu)化計算的遺傳算法工具;
4) 優(yōu)化變量為單向加速度載荷;
5) 優(yōu)化目標為響應(yīng)大于真實環(huán)境的前提下,差值向量模最小。
具體計算流程如圖3所示。在頻率范圍確定后,正弦掃頻試驗和隨機試驗只是計算方式不同,文中以正弦掃頻試驗為例進行介紹。
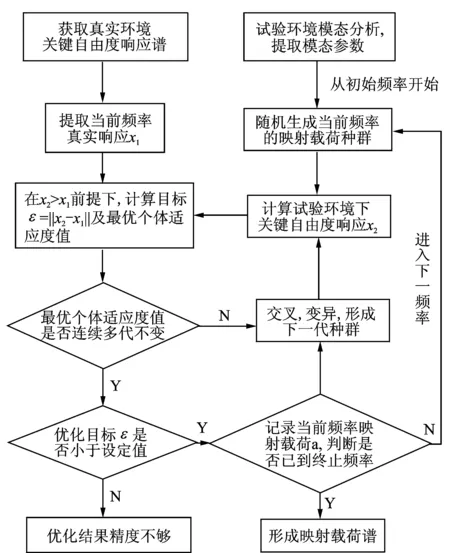
圖3 映射載荷優(yōu)化計算流程Fig.3 Optimization process of the mapping load
2.2 試驗環(huán)境下結(jié)構(gòu)建模方法[8]
試驗環(huán)境下,結(jié)構(gòu)受振動臺固定支承做強迫振動,動力學(xué)方程為
(1)
其中:M,C,K分別為結(jié)構(gòu)在固定支承邊界條件下的質(zhì)量矩陣、阻尼矩陣和剛度矩陣(這里的質(zhì)量矩陣為一致質(zhì)量矩陣,阻尼模型為瑞利阻尼,且阻尼矩陣忽略了支座自由度與內(nèi)部自由度之間的耦合);νd,vv,va分別為位移、速度、加速度;P為所受外力;下標i和g分別表示內(nèi)部自由度和支座自由度。
將式(2)中的第1行展開,可得
Miiνa,i+Ciiνν,i+Kiiνd,i=-Migνa,g-Kigνd,g
(2)
對于每一角頻率ωt均有
(3)
由此可建立結(jié)構(gòu)內(nèi)部自由度響應(yīng)和振動臺加速度激勵之間的關(guān)系,由于優(yōu)化計算映射載荷過程中需要反復(fù)計算結(jié)構(gòu)響應(yīng),為提高計算效率,利用模態(tài)疊加法計算,式(4)為正則模態(tài)坐標與物理坐標轉(zhuǎn)換關(guān)系,式(5)為模態(tài)正交性關(guān)系
vd,i=ΨN×mηm×1
(4)
(5)
其中:η為結(jié)構(gòu)內(nèi)部自由度正則模態(tài)坐標;ΨN×m為正則振型矩陣(假設(shè)結(jié)構(gòu)內(nèi)部自由度為N,取模態(tài)截斷階數(shù)為m);ξ為前m階模態(tài)阻尼比矩陣;ω為前m階固有頻率矩陣。
將式(5)帶入(3)可得優(yōu)化計算式
(6)
對式(4)和式(6)進行傅里葉變換轉(zhuǎn)化到頻域
(7)
Y=Ψy
(8)
其中:y,X和Y分別為η,va,g和vd,i對應(yīng)頻域上的值。
對于隨機振動情況,式(7)和式(8)相應(yīng)變?yōu)?/p>
(9)
PY=ΨPyΨT
(10)
其中:Py,PX和PY分別為η,va,g和vd,i對應(yīng)的功率譜密度值。
3 試驗驗證
在利用剛性邊界條件結(jié)構(gòu)對載荷映射方法進行初步驗證后[10],將其應(yīng)用于柔性邊界條件的結(jié)構(gòu)試驗中,并與傳統(tǒng)方法比較,試驗為垂直方向(z向)激勵,頻率范圍為10~200 Hz。本研究中結(jié)構(gòu)和邊界條件都確定,加速度條件的制定方法為取峰值包絡(luò)和考慮測量誤差取峰值1.1倍余量包絡(luò)兩種方式。
3.1 驗證結(jié)構(gòu)
如圖4所示為試驗結(jié)構(gòu)整體示意圖,由上下兩部分組成,分別稱為負載子結(jié)構(gòu)(模擬有效載荷)和源子結(jié)構(gòu)(模擬有效載荷安裝結(jié)構(gòu)),高度方向為z向,長度方向為x向,寬度方向為y向。源為懸臂形式,z向激勵時,z向平動和繞y向轉(zhuǎn)動為主要響應(yīng),因此對于z向激勵,負載為柔性邊界條件。
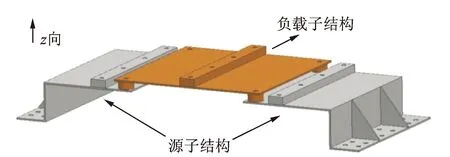
圖4 驗證結(jié)構(gòu)整體及其組成部分示意圖Fig.4 The whole verification structure and its components
為確定負載的關(guān)鍵響應(yīng)點,建立整體結(jié)構(gòu)有限元模型,如圖5所示,一階頻率f1=37Hz,二階頻率f2=139Hz。負載通過界面安裝在源上模擬整體試驗結(jié)果,如圖6所示。根據(jù)圖5所示z向彎曲模態(tài)結(jié)果,選定圖6中頂層質(zhì)量塊及頂層板面邊緣中點為負載的關(guān)鍵響應(yīng)點,z向平動自由度為關(guān)鍵自由度;頂層板面中間位置響應(yīng)作為參考點;下層板面與上層連接處傳感器用來測量整體試驗時負載安裝界面的z向響應(yīng)。圖7為負載單獨試驗時,包括模態(tài)試驗和正弦掃頻試驗的安裝邊界,表1為負載模態(tài)分析和試驗結(jié)果,可以看到負載有限元模型接近于實際結(jié)構(gòu),尤其對z向主要模態(tài),頻率差很小,可以滿足后續(xù)計算的要求。
表2為驗證試驗流程。第1步對整體結(jié)構(gòu)掃頻,模擬真實環(huán)境,得到有效載荷安裝界面加速度響應(yīng)試驗值,包絡(luò)得到傳統(tǒng)試驗條件,同時得到關(guān)鍵點和參考點的實測響應(yīng);第2步按照傳統(tǒng)方法進行負載試驗,得到關(guān)鍵點和參考點響應(yīng)與整體試驗實測值對比;第3步利用整體試驗關(guān)鍵點響應(yīng)和試驗邊界,按照圖3所示流程計算出映射界面加速度,獲得基于載荷映射計算的試驗條件,得到關(guān)鍵點和參考點響應(yīng)與整體、傳統(tǒng)試驗對比;第4步利用映射界面加速度計算界面力,對其包絡(luò)作為力條件進行負載力限試驗。試驗結(jié)果按此試驗流程依次給出。考慮試驗件質(zhì)量小且對稱,夾具剛性足夠,試驗中在夾具與試驗件連接處安裝控制傳感器做單點控制。
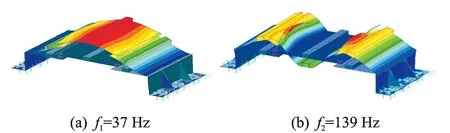
圖5 整體結(jié)構(gòu)z向彎曲模態(tài)Fig.5 The first 2 bending modes for the whole structure
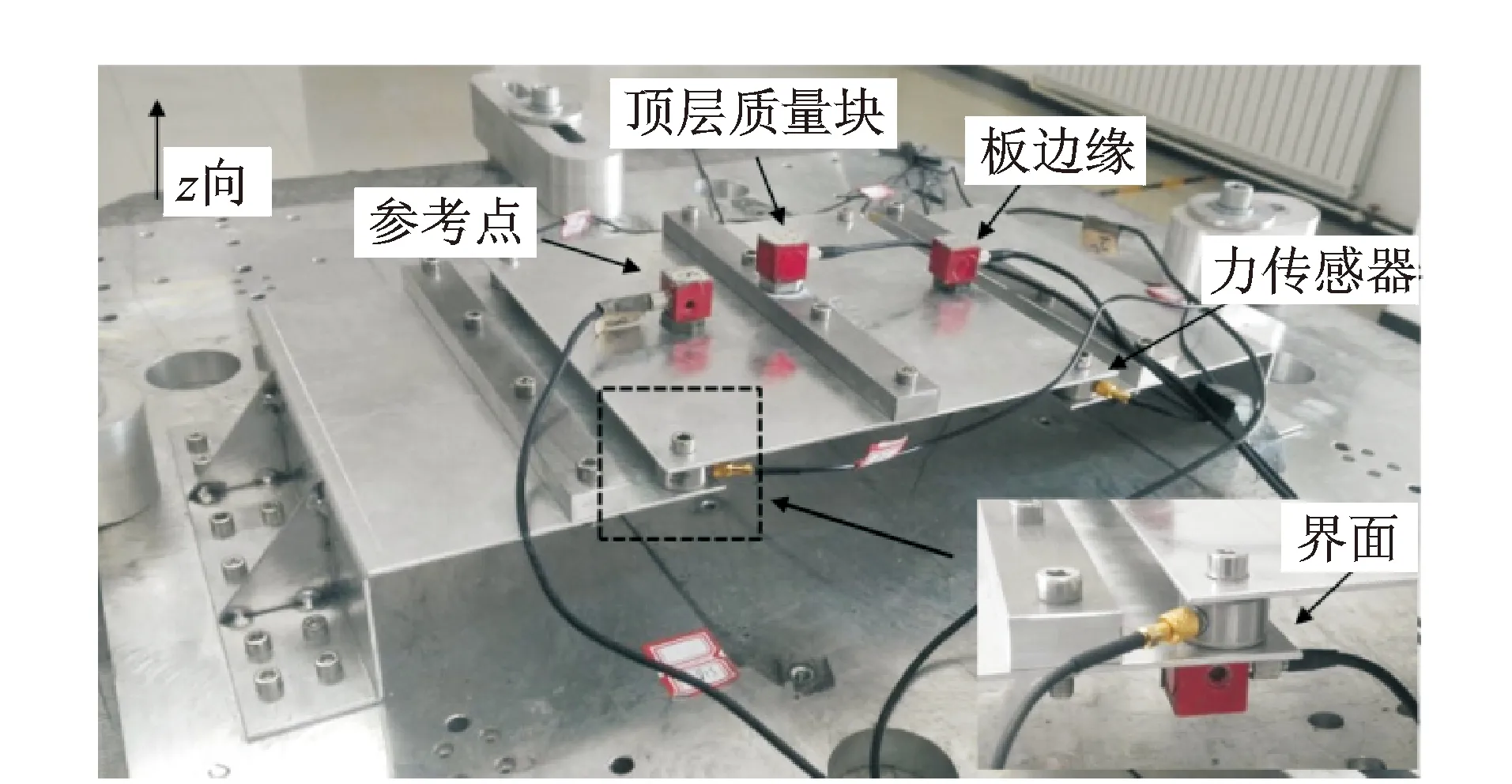
圖6 驗證結(jié)構(gòu)整體及傳感器位置Fig.6 The whole verification structure and location of sensors
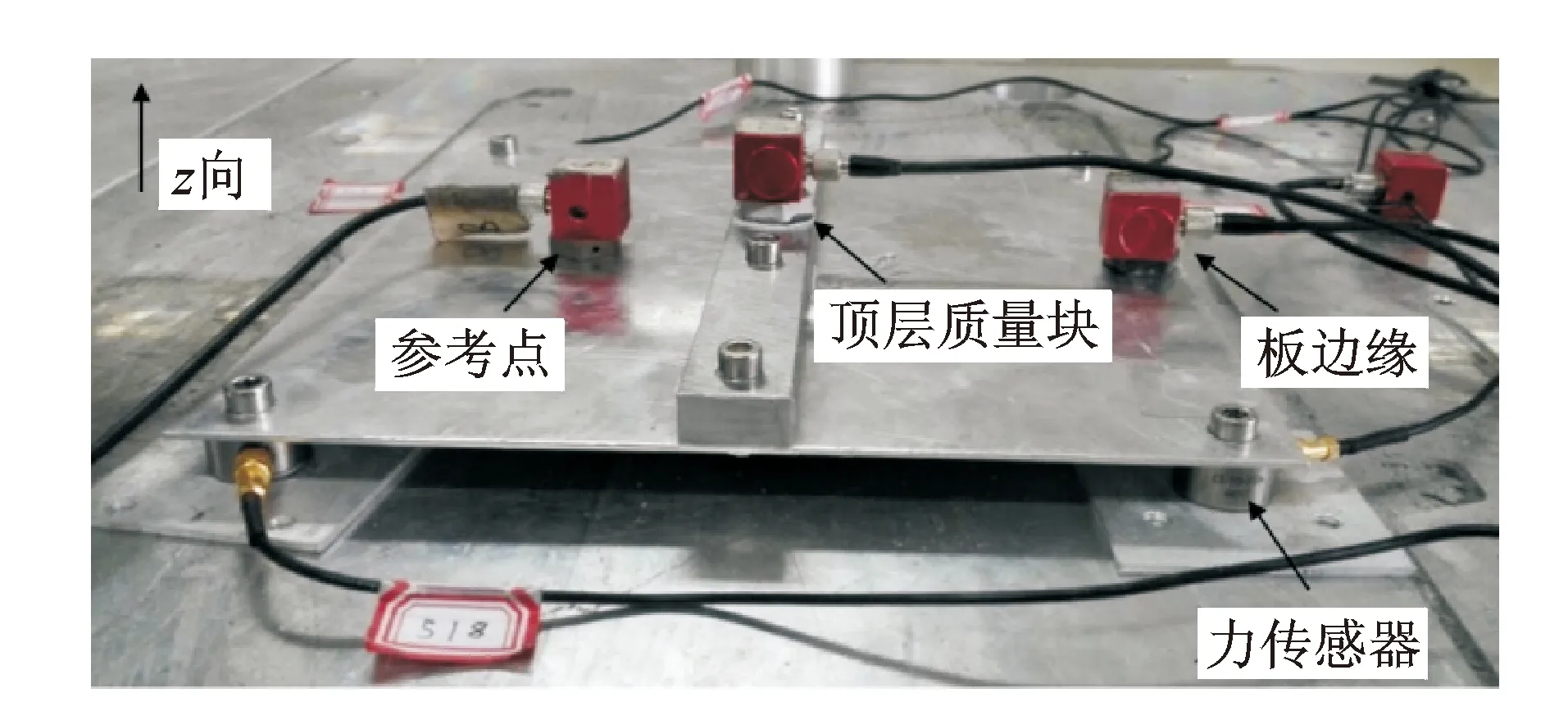
圖7 驗證結(jié)構(gòu)負載部分及選定的關(guān)鍵點位置Fig.7 The load part of the verificationstructure and the key points
Tab.1Thenaturalfrequenciesoffirst4modesfromexperimentsandFEMsimulationsfortheloadstructure

模態(tài)階次試驗頻率/Hz計算頻率/Hz頻率差/HzZ向有效質(zhì)量/kg184.0486.852.810.4552131.74129.582.163.63×10-223301.98290.5511.431.05×10-234362.08363.931.850.018
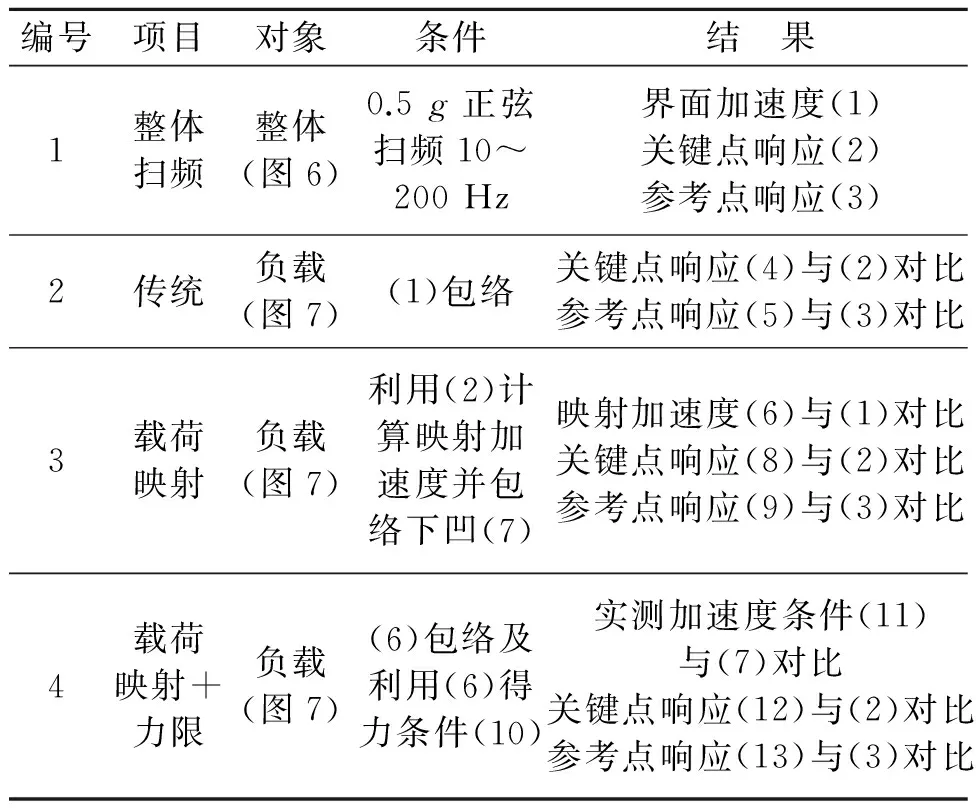
表2 驗證試驗流程
3.2 傳統(tǒng)試驗結(jié)果
如圖8所示,整體0.5g正弦掃頻,負載界面的z向加速度響應(yīng)為紅色劃虛線,其峰值包絡(luò)為藍色實線,黑色點虛線為對峰值包絡(luò)再取1.1倍放大,將兩種包絡(luò)作為負載傳統(tǒng)試驗條件,對負載進行正弦掃頻試驗測得,關(guān)鍵點和參考點響應(yīng)與整體試驗結(jié)果對比如圖9所示。
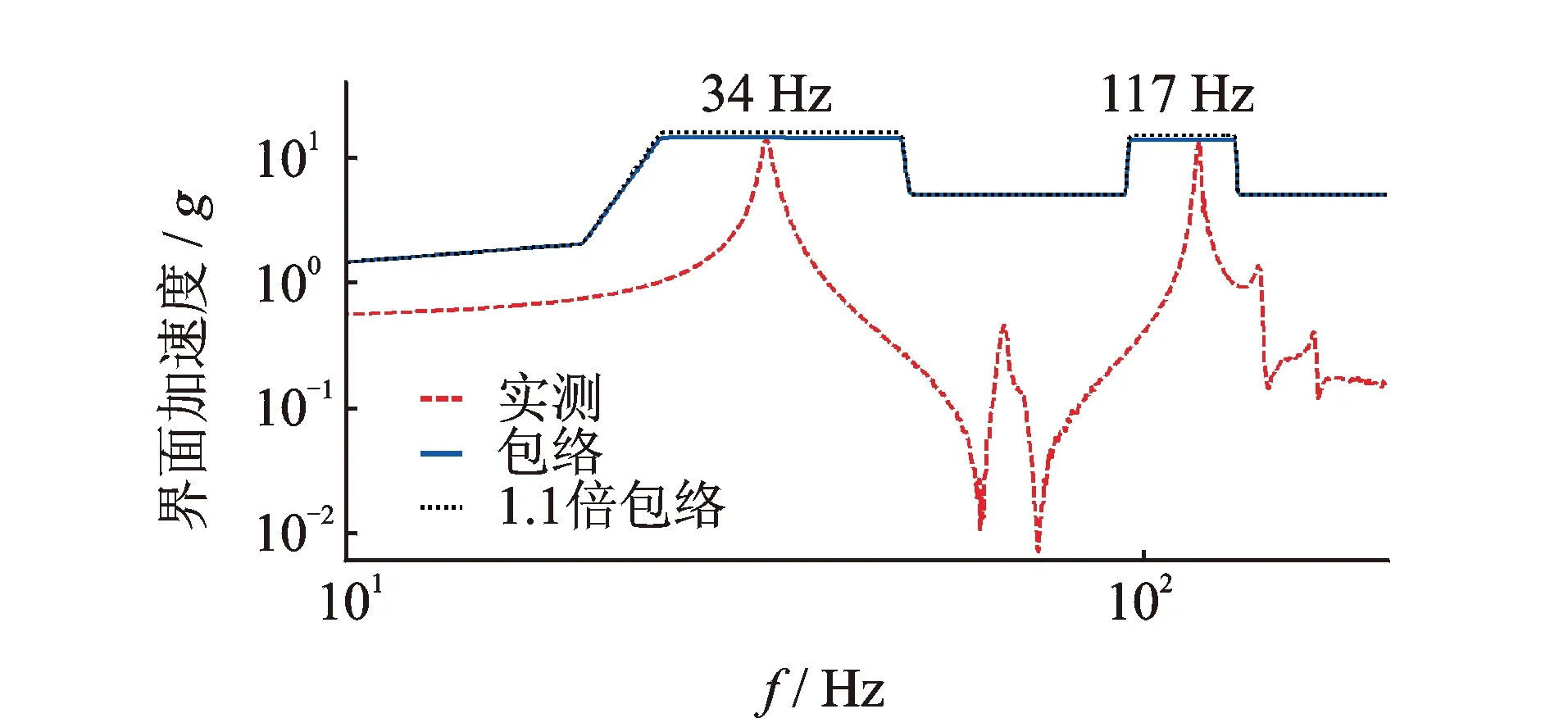
圖8 整體掃頻界面所測界面加速度及其包絡(luò)Fig.8 Comparison of interface acceleration of in whole structure test and its envelopes
從圖9看出,傳統(tǒng)試驗得到的關(guān)鍵點和參考點響應(yīng)在不同頻段分別出現(xiàn)了欠試驗和過試驗情況:
1) 在整體結(jié)構(gòu)一階固有頻率34 Hz處,頂層質(zhì)量塊為響應(yīng)最大點,由圖9(a)和9(b),看出峰值包絡(luò)和1.1倍包絡(luò)傳統(tǒng)試驗響應(yīng)分別為17.38和19.28g,整體掃頻結(jié)果為19.56g,欠試驗情況明顯;由圖9(c)看出,板邊緣峰值包絡(luò)試驗結(jié)果為15.40g,整體掃頻結(jié)果為15.68g也存在欠試驗;
2) 在整體結(jié)構(gòu)二階固有頻率117 Hz處,頂層質(zhì)量塊為響應(yīng)最大位置,由圖9(a),峰值包絡(luò)試驗結(jié)果為9.84g,整體掃頻結(jié)果為10.48g,存在欠試驗;
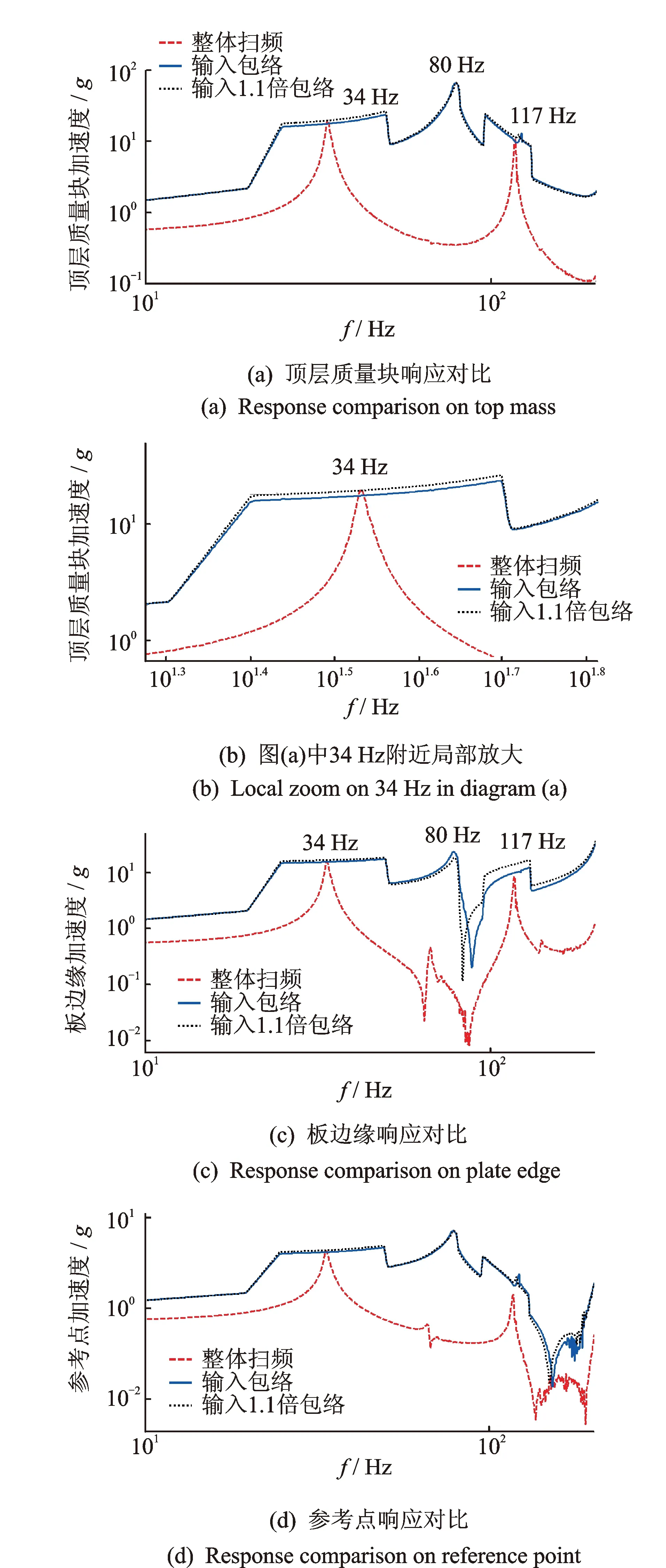
圖9 傳統(tǒng)試驗和整體掃頻所測響應(yīng)對比Fig.9 Response comparison of traditional SDOF test and the whole structure test
3) 由圖9(a,c,d)看出,在負載一階固有頻率80 Hz(即整體結(jié)構(gòu)動力吸振點)附近,過試驗情況明顯;
4) 由圖9(d)看出,在150 Hz附近,參考點局部出現(xiàn)欠試驗。
3.3 載荷映射試驗結(jié)果
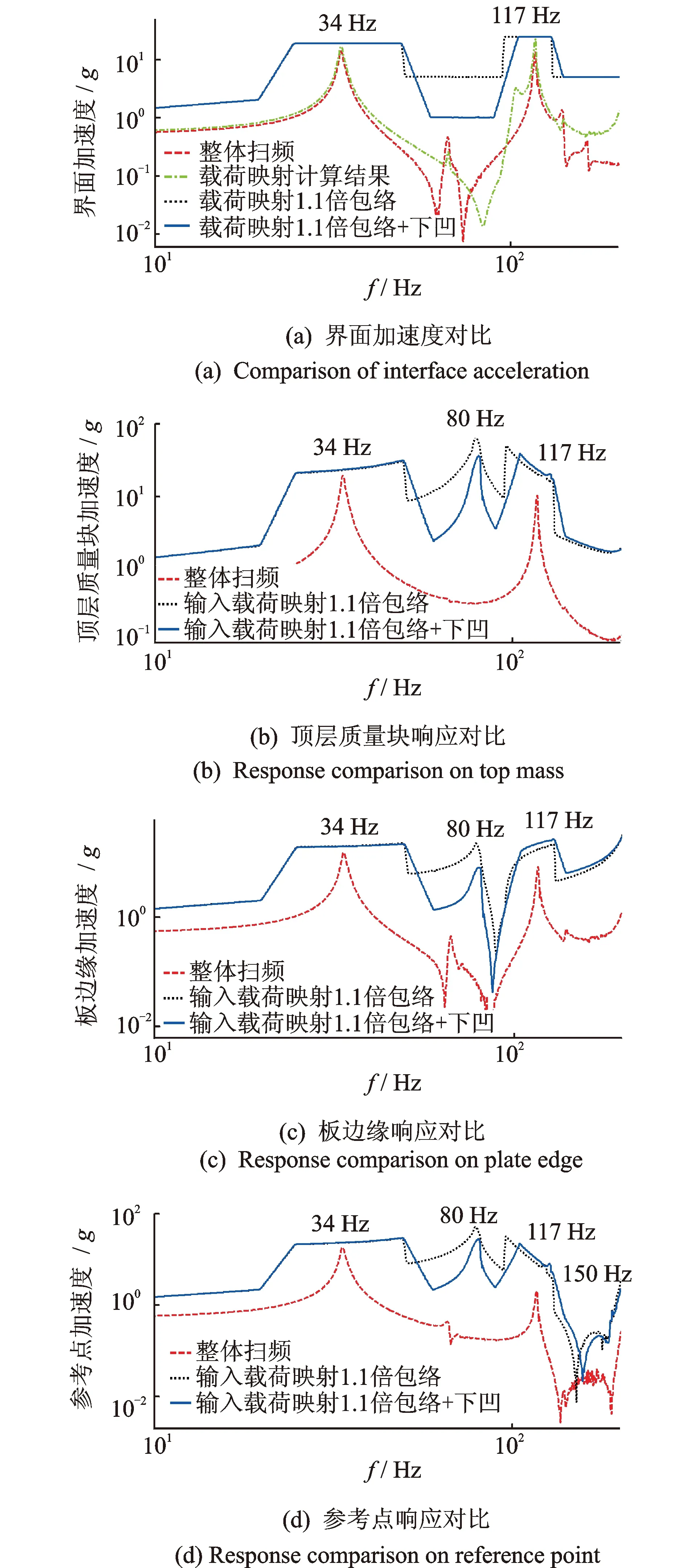
圖10 載荷映射與整體掃頻試驗結(jié)果對比Fig.10 Result comparison of load mapping method and the whole structure test
將整體掃頻得到的關(guān)鍵響應(yīng)結(jié)果,即頂層質(zhì)量塊和板邊緣響應(yīng)輸入到負載的載荷映射計算程序中,得到映射加速度計算結(jié)果,如圖10(a)綠色點劃線所示,包絡(luò)后作為條件如藍色實線所示,與整體掃頻所測界面加速度即紅色劃虛線比較結(jié)果如下:從圖10(a)中紅色劃虛線和綠色點劃線對比可以看到,負載在整體安裝柔性邊界條件下與試驗剛性邊界條件下界面加速度峰值發(fā)生改變,可知負載頻響函數(shù)變化,這就是前述傳統(tǒng)試驗在整體結(jié)構(gòu)固有頻率處發(fā)生欠試驗的原因;加速度谷值頻率,即整體結(jié)構(gòu)動力吸振點也有很大差別。采用映射載荷條件對負載進行試驗,對比載荷映射試驗關(guān)鍵點和參考點響應(yīng)與整體掃頻結(jié)果如圖10(b)~(d)。可以看出,關(guān)鍵點的響應(yīng)和整體掃頻結(jié)果相比沒有出現(xiàn)欠試驗。參考點響應(yīng)與關(guān)鍵點的情況基本一致。由于參考點的整體試驗結(jié)果沒有參與載荷映射計算,在150 Hz附近欠試驗情況仍然存在,從另一個角度表明由于邊界差異可能在結(jié)構(gòu)不同部位的多個頻段發(fā)生欠試驗。為了保證敏感點不發(fā)生欠試驗,需要讓敏感點都參與載荷映射計算。
綜上,載荷映射參與優(yōu)化計算的敏感點可以有效避免因邊界條件差異引起的欠試驗問題。
3.4 載荷映射結(jié)合力限技術(shù)試驗結(jié)果
通過載荷映射方法基本可以解決由于邊界條件引起的欠試驗問題,但無法解決由于平滑性包絡(luò)引起的動力吸振點過試驗問題,可以參考響應(yīng)的放大量級,依據(jù)映射加速度計算結(jié)果對加速度條件主動下凹,或結(jié)合力限技術(shù)來緩解。兩種試驗結(jié)果如圖11所示。在界面映射加速度載荷的基礎(chǔ)上通過式(1)計算界面映射力載荷,考慮到兩次計算過程可能的誤差放大,對界面映射力結(jié)果進行1.4倍峰值包絡(luò)作為力條件,在試驗中進行力與加速度雙控。圖11(a)為界面力比較,圖11(b)為界面加速度比較。可見,在引入力條件后界面加速度在負載一階頻率80 Hz附近可以自動下凹,深度明顯優(yōu)于主動下凹,而且沒有發(fā)生欠試驗,但在下凹最低點之后出現(xiàn)了一定的振蕩。
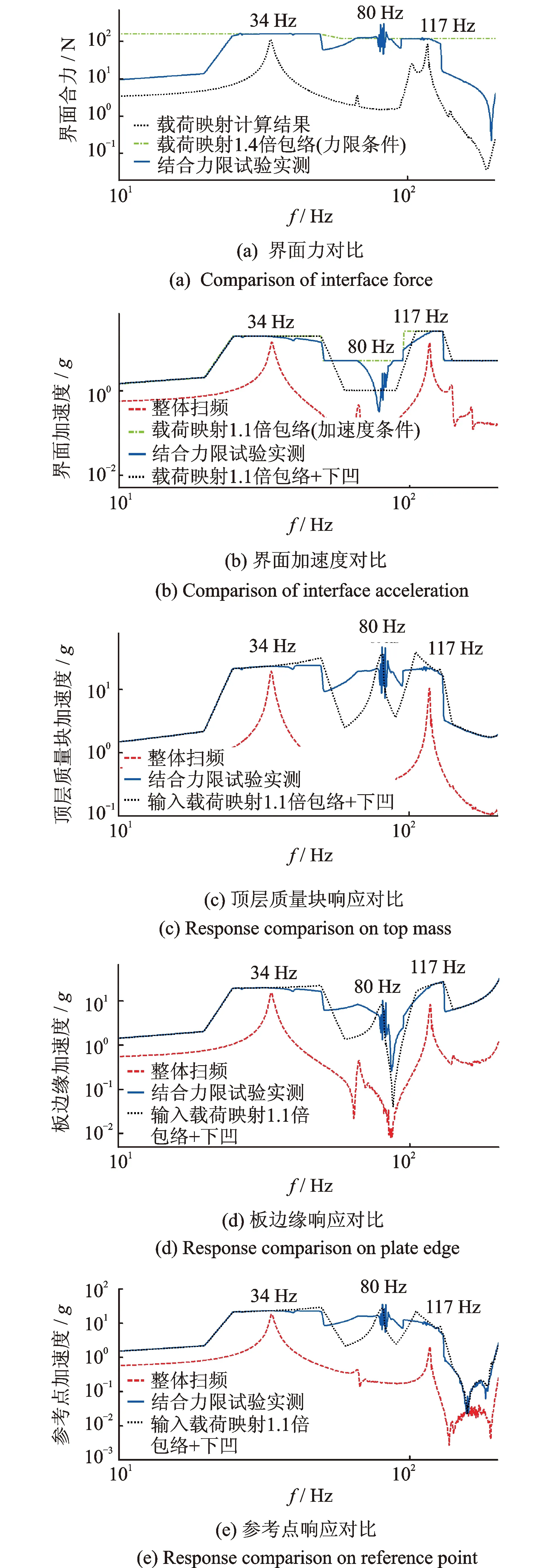
圖11 力限與主動下凹、整體掃頻試驗結(jié)果對比Fig.11 Result comparison of force limit notching method and the whole structure test
力限技術(shù)的原理是基于界面加速度和界面力的動力吸振點不一致,以界面加速度和界面力的包絡(luò)共同作為試驗條件進行控制,以避免單獨控制其中某一項時動力吸振點處的嚴重過試驗現(xiàn)象[11]。力與加速度雙控技術(shù)是以加速度控制為主,以力限制響應(yīng)控制為輔,其基本原理是[7]:在振動臺與試驗件間安裝力傳感器以測得界面力,控制通道上設(shè)置加速度條件,輔助通道上設(shè)置響應(yīng)限制值(力限閾值)。試驗中將加速度和力傳感器的輸出信號,通過放大器分別接入控制通道和輔助通道上。當(dāng)界面力未達到力限閾值時,控制輸入按加速度試驗條件;在結(jié)構(gòu)共振頻段界面力達到或超過力限閾值時,控制系統(tǒng)的信號選擇和限制功能自動地實現(xiàn)控制通道的轉(zhuǎn)換,使界面力的量級不超過力限閾值;共振頻段之后,隨著界面力量級的下降,控制通道又轉(zhuǎn)回到主控制通道,按加速度試驗條件進行試驗。在界面力量級達到限制值受到限制控制時,使加速度控制條件下降,從而實現(xiàn)下凹控制。雙控過程存在著加速度條件控制和力條件控制的往復(fù)切換,靠控制系統(tǒng)內(nèi)部的算法來保證。
如文獻[12]指出,下凹最低點過后的振蕩現(xiàn)象普遍存在于力限試驗中,是由于目前振動臺控制系統(tǒng)本身功能缺陷所致,國外解決方法是額外補充一套控制系統(tǒng)來共同對振動臺控制,本研究中還不具備這一條件。圖11(c)~(e)是引入力限條件后關(guān)鍵點和參考點響應(yīng)與主動下凹、整體掃頻的比較,若振蕩區(qū)域取響應(yīng)平均水平,從響應(yīng)結(jié)果看,引入力限條件對過試驗的緩解也要明顯好于主動下凹。
4 結(jié)束語
根據(jù)航天器振動試驗的有效性要求,提出結(jié)合載荷映射思想的振動試驗條件制定方法。針對某典型算例,通過載荷映射試驗與傳統(tǒng)試驗對比表明,邊界條件差異可能導(dǎo)致傳統(tǒng)試驗發(fā)生欠試驗問題,利用載荷映射方法制定加速度條件可以有效避免欠試驗。由映射載荷制定加速度條件的包絡(luò)過程同樣會造成負載固有頻率處嚴重過試驗,可以結(jié)合下凹方法緩解。利用映射界面加速度計算映射界面力,并以此制定力條件進行力限試驗,與加速度條件主動下凹相比,對過試驗的緩解效果更好。
由于加載設(shè)備和建模方法的限制,只對單優(yōu)化變量和低頻振動試驗進行了研究,未來精密有效載荷在中頻范圍也存在關(guān)鍵模態(tài)[13]。目前,中頻建模方法是力學(xué)環(huán)境預(yù)示的難點,也是國內(nèi)外研究的熱點[14-15]。因此,后續(xù)研究可以增加優(yōu)化變量數(shù)量,結(jié)合多點激勵試驗技術(shù)來得到映射載荷,并掌握中頻建模方法,擴大載荷映射方法的應(yīng)用范圍。
[1] 馬興瑞,韓增堯,鄒元杰,等.航天器力學(xué)環(huán)境分析與條件設(shè)計研究進展[J].宇航學(xué)報,2012,33(1):1-12.
Ma Xingrui, Han Zengyao, Zou Yuanjie,et al. Review and assessment of spacecraft mechanical environment analysis and specification determination[J].Journal of Astronautics, 2012, 33(1):1-12.( in Chinese)
[2] 黃波,張正平,李海波,等.力限振動試驗技術(shù)進展綜述[J].強度與環(huán)境,2012, 39(5) :18-27.
Huang Bo, Zhang Zhengping, Li Haibo, et al.Applicationof force limited control in vibration test[J].Structure & Environment Engineering, 2012, 39(5):18-27. ( in Chinese)
[3] GJB 1027A-2005.運載器、上面級、航天器試驗要求[S].北京:國防科學(xué)工業(yè)委員會,2006.
[4] Bellini M, Luison D, Tizzani L.Cygnus pressurized cargo module: validation of mathematical model and dynamic qualification of secondary structure[C]∥European Conference on Spacecraft Structure Material & Environmental Testing. Noordwijk, The Netherlands:[s.n.],2012:513-518.
[5] 周瑩,宋漢文.力控振動試驗與過試驗現(xiàn)象分析[J].振動與沖擊,2008, 27(4):82-84.
Zhou Ying, Song Hanwen.Analysis of a vibration overtest problem and a force-limited control vibration test [J].Journal of Vibration and Shock, 2008, 27(4):82-84. ( in Chinese)
[6] Scharton T D. Force limited vibration testing monograph[M]. California Institute of Technology:Jet Propulsion Laboratory, 1997:20-22.
[7] Force limited vibration testing. NASA Technical Handbook 7004C[M].Washington, DC:[s.n.], 2012:24-26.
[8] 胡杰.導(dǎo)彈結(jié)構(gòu)部件在不同力學(xué)環(huán)境中的載荷映射關(guān)系研究[D].西安:西安交通大學(xué),2011:15-18.
[9] 袁家軍,韓增堯,馮咬齊,等.衛(wèi)星結(jié)構(gòu)設(shè)計與分析[M].北京:中國宇航出版社,2004:102-104.
[10] Ding Yiting, Yang Zhengxi, Ren Weijia, et al. Using response projection method to eliminate the effect of boundary difference during vibration tests in spacecraft[C]∥ The 22ndInternational Congress on Sound and Vibration. Roman,Italy:[s.n.], 2015:1402-1411.
[11] 陳章位,文祥,周建川,等.力限控制在振動試驗中的應(yīng)用研究[J].振動與沖擊,2013, 32(6):105-108.
Chen Zhangwei, Wen Xiang, Zhou Jianchuan,et al.Applicationof force limited control in vibration test[J].Journal of Vibration and Shock, 2013, 32(6):105-108. ( in Chinese)
[12] Bettacchioli A. Simulation of satellite vibration test[C]∥ European Conference on Spacecraft Structure Material & Environmental Testing. Braunschweig, Germany:[s.n.],2014: 332-340.
[13] Akagi H, Ando S, Shi Q, et al.Prediction of the vibroacoustic response of the equipment mounted on the infrared space telescope “SPICA”[C]∥ European Conference on Spacecraft Structure Material & Environmental Testing. Braunschweig, Germany:[s.n.],2014: 422-428.
[14] Cicirello A, Langley R S. The vibro-acoustic analysis of built-up systems using a hybrid method with parametric and non- parametric uncertainities[J].Journal of Sound and Vibration, 2013, 332(1):2165-2178.
[15] 朱衛(wèi)紅,馬興瑞,韓增堯. 航天器中頻力學(xué)環(huán)境預(yù)示研究進展[J].航天器工程,2014, 23(1): 110-117.
Zhu Weihong, Ma Xingrui, Han Zengyao. Research evolution on mid-frequency mechanical environment predication of spacecraft[J].Spacecraft Engineering, 2014, 23(1): 110-117.(in Chinese)
2015-09-02;
2016-01-19
TH113.1; TB535; O321

楊正璽,男,1991年9月生,碩士生。主要研究方向為航天器結(jié)構(gòu)設(shè)計與分析。曾發(fā)表《Using response projection method to eliminate the effect of boundary difference during vibration tests in spacecraft》(The 22nd International Congress on Sound and Vibration, Florence,Italy:[s.n.],2015)等論文。
E-mail:y7090364@163.com
陸東,男,1962年12月生,研究員、碩士生導(dǎo)師。主要研究方向為航天器結(jié)構(gòu)設(shè)計與分析。
E-mail:ludong@csu.ac.cn
猜你喜歡
中老年保健(2021年12期)2021-08-24 03:30:40
哲學(xué)評論(2021年2期)2021-08-22 01:53:34
中國傳媒大學(xué)學(xué)報(自然科學(xué)版)(2021年1期)2021-06-09 08:43:00
當(dāng)代陜西(2020年13期)2020-08-24 08:22:02
中國生殖健康(2020年6期)2020-02-01 06:28:50
中華詩詞(2019年7期)2019-11-25 01:43:04
中國生殖健康(2019年11期)2019-01-07 01:28:02
制造技術(shù)與機床(2017年5期)2018-01-19 02:49:17
濰坊學(xué)院學(xué)報(2016年2期)2016-12-01 13:00:11
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
