手制動預(yù)緊力自動調(diào)節(jié)控制系統(tǒng)研究
2017-11-07 12:46:25寧忠麟覃光許宋朋舉吳亞菲
汽車零部件 2017年10期
關(guān)鍵詞:信號
寧忠麟,覃光許,宋朋舉,吳亞菲
(1.上汽通用五菱汽車股份有限公司技術(shù)中心,廣西柳州 545007;2.武漢理工大學(xué)汽車工程學(xué)院,湖北武漢 430070)
手制動預(yù)緊力自動調(diào)節(jié)控制系統(tǒng)研究
寧忠麟1,覃光許1,宋朋舉2,吳亞菲2
(1.上汽通用五菱汽車股份有限公司技術(shù)中心,廣西柳州 545007;2.武漢理工大學(xué)汽車工程學(xué)院,湖北武漢 430070)
針對汽車總裝線上手制動系統(tǒng)人工裝調(diào)工位所存在的耗時長、勞動強度大、調(diào)節(jié)精度無法保證的問題,通過深入研究預(yù)緊力調(diào)節(jié)方式、調(diào)節(jié)流程,開發(fā)了一套手制動預(yù)緊力自動調(diào)節(jié)控制系統(tǒng)。以試驗數(shù)據(jù)為基礎(chǔ),分析影響系統(tǒng)精度的因素;基于LabVIEW平臺實現(xiàn)預(yù)緊力自動調(diào)節(jié)控制、檢驗、測試結(jié)果共享及查詢等功能。
手制動預(yù)緊力;調(diào)節(jié)控制;采集卡;電磁繼電器;LabVIEW
0 引言
汽車駐車制動可靠性關(guān)系到人員的安全問題,駐車制動的人工調(diào)節(jié)不僅耗時、勞動強度大,而且還會因操作人員的主觀意識及操作不規(guī)范而無法保證調(diào)節(jié)精度。為此,研發(fā)自動調(diào)節(jié)控制手制動預(yù)緊力的裝調(diào)系統(tǒng)顯得尤其重要。
1 調(diào)節(jié)控制系統(tǒng)組成及功能
系統(tǒng)主要由卡緊制動手柄的夾具模塊、驅(qū)動手柄圓周運動的電機驅(qū)動模塊、自動調(diào)節(jié)控制軟件及啟停等信號指示模塊組成。其中自動調(diào)節(jié)控制軟件及啟停等信號指示模塊的核心硬件包括以下幾種:
1.1 電磁繼電器
電磁繼電器是一種電子控制器件,通常應(yīng)用于自動控制電路中,實現(xiàn)用較小的電流、較低的電壓去控制較大電流、較高電壓的一種“自動開關(guān)”,在電路中起著自動調(diào)節(jié)、安全保護、轉(zhuǎn)換電路等作用,相比開關(guān)采集卡而言價格更低、適應(yīng)性更強。
1.2 信號采集卡
信號采集卡主要用來采集不同信號以便做出相應(yīng)的指示和動作,系統(tǒng)中采用電壓采集卡采集準備開關(guān)、啟動開關(guān)及急停開關(guān)信號,當改變開關(guān)狀態(tài)時電壓信號發(fā)生變化,通過判斷電壓信號的變化模式(由高到低/由低到高)執(zhí)行相應(yīng)的動作,如程序的運行、指示燈的明暗等。
1.3 扭矩傳感器
手制動預(yù)緊力的檢驗最終反映到驅(qū)動手柄的扭矩,因此將電機軸扭矩反饋作為最終的檢驗指標。利用高精度的扭矩傳感器采集電機輸出軸的實時扭矩,可以提高系統(tǒng)檢驗的精度。
2 調(diào)節(jié)控制系統(tǒng)工作原理
安裝裝調(diào)設(shè)備,按下準備開關(guān),準備指示燈亮,利用掃碼槍掃入車輛信息,按下啟動按鈕,控制程序運行,電機帶動夾具驅(qū)動手制動手柄轉(zhuǎn)動,手柄達到第一個設(shè)定位置后電槍開始工作,打緊調(diào)整螺母;為了防止手制動拉鎖卷曲,第一次打緊調(diào)整螺母后驅(qū)動手柄滿齒轉(zhuǎn)動3次以消除各部間隙,再次驅(qū)動手柄到第一個設(shè)定位置,按設(shè)定的扭矩第二次打緊調(diào)整螺母,之后驅(qū)動手柄到第二個設(shè)定位置,通過檢驗扭矩傳感器反饋的扭矩值判斷預(yù)緊力調(diào)節(jié)是否合格,并將最終的結(jié)果及相關(guān)信息寫入數(shù)據(jù)庫中以方便查詢,最后電機回位,調(diào)整結(jié)束。調(diào)節(jié)控制流程圖如圖1所示。
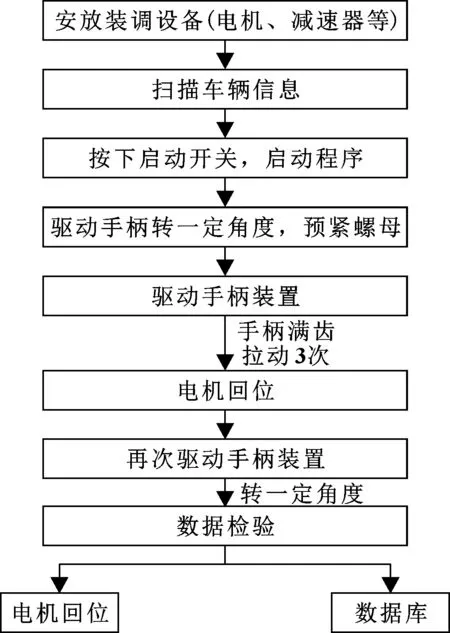
圖1 預(yù)緊力調(diào)控流程圖
LabVIEW作為整個系統(tǒng)的軟件開發(fā)平臺,通過Ether CAT網(wǎng)絡(luò)協(xié)議驅(qū)動電機驅(qū)動器,調(diào)節(jié)完成后測試中指示燈熄滅,緊急情況可以通過急停開關(guān)切斷電機驅(qū)動器電路,急停解除后恢復(fù)正常運行。
3 系統(tǒng)設(shè)計及主要控制電路
3.1 3類控制開關(guān)控制設(shè)計
整個過程通過改變開關(guān)狀態(tài)來采集對應(yīng)的電壓信號,并發(fā)出相應(yīng)的控制指令,為保護電路用電器,每個開關(guān)電路串聯(lián)2個千兆歐姆電阻,電壓采集卡的通道并聯(lián)在其中一個電阻兩端,采集對應(yīng)電阻電壓。控制系統(tǒng)中配備了準備開關(guān)、啟動開關(guān)及急停開關(guān),并分別匹配以黃色、綠色及紅色指示燈,準備開關(guān)和啟動開關(guān)處于常開狀態(tài),急停開關(guān)處于常閉狀態(tài)。如圖2所示為3類控制開關(guān)的電路設(shè)計,電壓采集卡0、1、2三個通道分別采集R11、R21、R31三個電阻兩端電壓。
其中電壓采集卡的工作電壓為±10 V,額定電流為1 A;控制電路部分采用U=12 V的直流電壓,每個電阻阻值R=1 000 Ω,則電路中最大電流Imax=0.006 A,3類開關(guān)閉合后采集到的電壓值UR11=UR21=UR31=6 V,電流和電壓都在安全范圍內(nèi)。
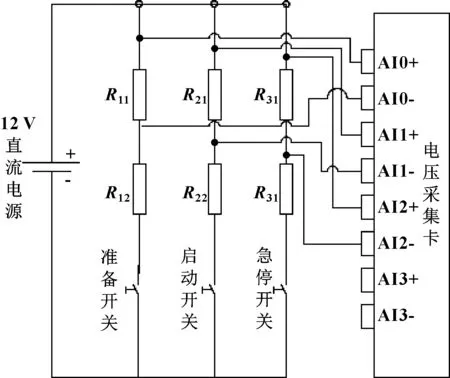
圖2 3類開關(guān)信號采集電路
3.2 3類信號指示燈控制設(shè)計
準備、測試中及急停指示燈都應(yīng)與3類開關(guān)協(xié)調(diào)使用,保證在開關(guān)信號狀態(tài)改變后相應(yīng)的指示燈改變狀態(tài)。測試前,3類指示燈處于熄滅狀態(tài),安放好夾具準備指示燈亮;按下啟動開關(guān),測試中指示燈亮、準備指示燈熄滅;整個調(diào)控流程結(jié)束后測試中指示燈自動熄滅;按下急停開關(guān)后急停指示燈亮;僅僅通過串聯(lián)電路的通斷來控制3類指示燈的明暗不能夠滿足實際需求,此系統(tǒng)采用數(shù)字輸出模塊給指示燈提供電壓,即當接收到開關(guān)狀態(tài)改變產(chǎn)生的電壓信號后閉合數(shù)字輸出模塊通道,通過通道輸出的電壓驅(qū)動信號指示燈的工作,3類指示燈數(shù)字輸出控制電路如圖3所示。
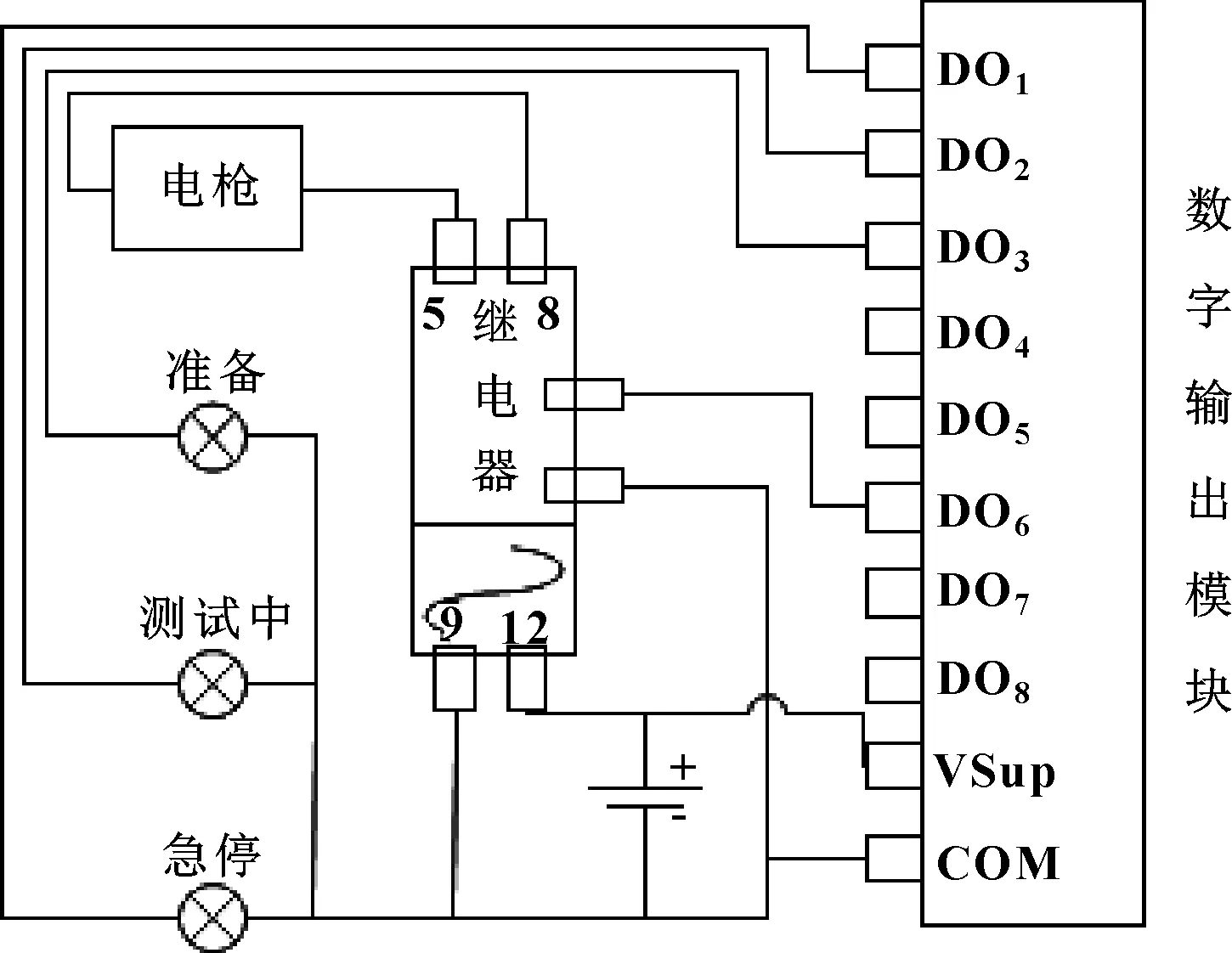
圖3 3類指示燈及電槍控制電路
3.3 電槍固定與控制設(shè)計
電槍用來調(diào)整螺母預(yù)緊力,然而手動打緊調(diào)整螺母時操作人員很難保證電槍不動,用支架固定的方式代替人手動操作,解決了電槍晃動的問題,調(diào)整螺母與電槍輸出端通過萬向節(jié)機構(gòu)實現(xiàn)扭矩的傳遞。為實現(xiàn)電槍按規(guī)定流程工作,因此需要控制電槍的正反轉(zhuǎn),系統(tǒng)采用電磁繼電器對電槍電路實現(xiàn)控制。如圖3所示。
繼電器5、9端口和8、12端口分別組成一個常開通道。
當數(shù)字輸出模塊DO6通道無電壓輸出時,繼電器5、9、12、8四個端口和電槍、電源構(gòu)成的電路處于斷開狀態(tài);當有電壓輸出時,繼電器控制電路通電,吸合動觸點,常開通道閉合,電槍電路通電,開始工作。
4 控制部分軟件設(shè)計
軟件部分主要包括開關(guān)及相應(yīng)指示燈模塊、主控制程序模塊及數(shù)據(jù)庫模塊,分別實現(xiàn)控制信號的傳遞及指示、電機及電槍運行、結(jié)果存儲、查詢等功能。
4.1 開關(guān)及相應(yīng)指示燈控制策略
3類開關(guān)的功能主要有:控制相應(yīng)指示燈的明暗、傳遞相應(yīng)的信號。不同模塊間信號的傳遞主要通過通知器或隊列的形式完成,在開關(guān)控制部分發(fā)送通知,主程序部分等待并接收通知,根據(jù)不同的通知內(nèi)容完成對應(yīng)的事件。圖4是信號通知及部分指示燈控制程序框圖。
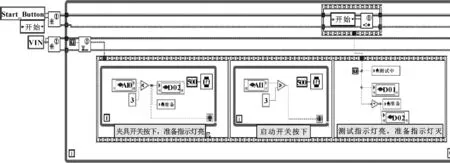
圖4 信號通知及部分指示燈控制程序框圖
啟動開關(guān)按下后,測試中指示燈亮,準備指示燈熄滅,通知器向主程序發(fā)送“開始”指令;緊急情況時,按下急停按鈕,通知器會發(fā)送“急停”指令,電機停止工作。
4.2 主控制程序
4.2.1 指令接收
主控制程序部分時刻等待通知器的消息,當接收到“開始”指令后,運行電機及電槍控制程序,完成圖1所述的工作流程,當接收到“急停”指令后運行停止電機控制程序。
4.2.2 影響測試精度的因素
綜合考慮控制精度、矩頻特性、過載能力及速度響應(yīng)性能等,選取了額定扭矩為4.82 N·m的伺服電機,其中編碼器分辨率為65 536,即電機轉(zhuǎn)一周發(fā)出65 536個脈沖信號或者接收到65 536個脈沖信號電機轉(zhuǎn)動一周。為了提供更高的位置精度和比較平滑的運動,LabVIEW平臺運動控制模塊默認的頻步率為16,即在LabVIEW平臺上控制電機運動時,電機每轉(zhuǎn)一周將會接收到65 536×16個脈沖,設(shè)電機轉(zhuǎn)動角度α,對應(yīng)的轉(zhuǎn)動位移為δ,則有:
δ=(α×65 536×16)/360
電機本身由于摩擦存在著一定的阻力矩,通過減速器和夾具后阻力矩會成倍增加,這對于最終檢驗有很大影響。傳感器反饋的力矩包括了電機、減速器、夾具帶來的阻力矩,設(shè)作用在手制動上的實際力矩為Ts,檢驗力矩上限值、下限值分別位Tu、Td,則有:
Ts=Tf-Tz
式中:Ts為實際作用在手剎上的力矩;Tf為傳感器反饋的實時力矩;Tz為電機、減速器、夾具等產(chǎn)生的阻力矩;
當Td
4.2.3 阻力矩確定
為確定電機、減速器及夾具部分帶來的阻力矩,在相同時間、同一位置處,以不同力矩進行了7組試驗,利用Origin數(shù)據(jù)分析工具對7組試驗數(shù)據(jù)進行對比分析。圖5是7組試驗數(shù)據(jù)的分布圖,圖中橫坐標代表測試時間,縱坐標代表電機軸的線速度,其中線速度作為電機軸是否開始轉(zhuǎn)動的指標。
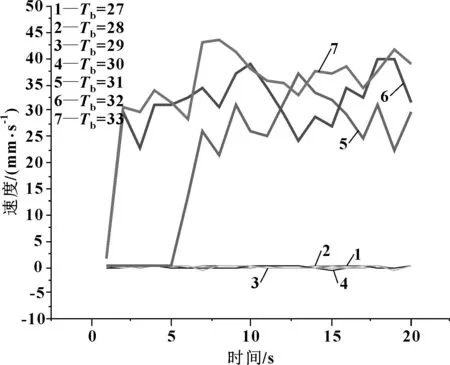
圖5 不同力矩下電機軸速度曲線分布
從圖5可知:當施加的力矩小于31 N·m時,電機軸的線速度在0上下波動,即施加的力矩不能克服自身的阻力矩;當施加的力矩為31、32、33時,電機軸速度逐漸增加并趨于穩(wěn)定。綜合考慮實際情況及曲線波動最終阻力矩Tz=32。圖中的力矩是LabVIEW平臺上經(jīng)過歸一化處理的量綱為一的標量,其中標量1 000對應(yīng)電機額定扭矩4.82 N·m,則有國際單位制下扭矩T(N·m)與標量Tb的線性關(guān)系為:
T=0.004 82×Tb
即當Tb=32時,T=0.154 24 N·m。假設(shè)選用減速器速比為25,則電機、減速器、夾具部分產(chǎn)生的阻力矩Tz=25T=3.856 N·m;經(jīng)過減速器減速增扭后阻力矩成倍增加,這對于施加在手剎上的實際力矩的確定造成了很大的誤差,嚴重影響測試精度,因此在檢驗過程需要加以考慮。
4.3 數(shù)據(jù)庫模塊
數(shù)據(jù)庫主要是完成信息存儲、查詢等功能,為方便數(shù)據(jù)整理,查詢模塊分為按時間范圍和按測試結(jié)果合格性兩種方式。
5 結(jié)論
基于LabVIEW平臺開發(fā)半自動化手剎預(yù)緊力調(diào)整系統(tǒng),通過控制系統(tǒng)完成各類操作指令及指示;綜合考慮適用性與系統(tǒng)成本,利用電磁繼電器實現(xiàn)電槍電路的通斷及保護。
分析電機工作原理,確定電機軸旋轉(zhuǎn)角度與位置量的關(guān)系;分析影響測試精度的因素,用控制變量的方法確定電機、減速器及夾具自身帶來的阻力矩,優(yōu)化最終的檢驗參數(shù)。
[1]周文怡,方俊雅,朱子環(huán).基于LabVIEW與Modbus/TCP的伺服電機控制系統(tǒng)[J].測控技術(shù),2015,34(3):83-84,88.
ZHOU W Y,FANG J Y,ZHU Z H.Control System of Servo Motor Based on LabVIEW and Modbus/TCP[J].Measurement & Control Technology,2015,34(3):83-84,88.
[2]蘇仔見,倪攀,許少倫.LabVIEW在運動控制系統(tǒng)實驗平臺的應(yīng)用和實現(xiàn)[J].實驗室研究與探索,2011,30(10):38-39,110.
SU Z J,NI P,XU S L.Realization of Motion Control System Experimental Platform Based on LabVIEW[J].Research and Exploration in Laboratory,2011,30(10):38-39,110.
[3]于義長,張春龍,張國旺.手制動力調(diào)節(jié)的相關(guān)研究應(yīng)用[J].輕型汽車技術(shù),2013(1/2):67-70.
[4]侯威.基于NI CompactRIO的直線電機伺服控制研究[D].秦皇島:燕山大學(xué),2014.
[5]鐘偉祺.NSW型手制動機組裝試驗臺設(shè)計[J].上海鐵道科技,2013(2):28-29.
[6]胡勇,劉強,周永清.基于LabVIEW平臺數(shù)據(jù)采集卡配置參數(shù)的保存與加載方法研究[J].交通與計算機,2004,22(6):44-46.
HU Y,LIU Q,ZHOU Y Q.How to Perform Saving and Auto Loading of Configuration Parameter of Acquisition Card Based on LabVIEW[J].Computer and Communications,2004,22(6):44-46.
[7]李宗立.一種基于NI采集卡的測量發(fā)動機同步信號的方法[J].汽車實用技術(shù),2015(9):21-22.
LI Z L.A Method for Measuring Synchronous Signal of Engine Based on NI Acquisition Card[J].Automobile Technology,2015(9):21-22.
ResearchofAutomaticalRegulationSystemofHandbrake’sPretighteningForce
NING Zhonglin1,QIN Guangxu1,SONG Pengju2,WU Yafei2
(1.Technical Center,SAIC-GM-Wuling Automobile,Liuzhou Guangxi 545007,China;2.Automotive Engineering School of Wuhan University of Technology,Wuhan Hubei 430070,China)
Appropriateness of handbrake’s pretightening force seriously affects the driver’s maneuverability and driving safety. In view of the present manual regulating station, there are some questions, such as time consuming, low degree of mechanization,accuracy cannot be guaranteed, with lucubrating its regulating mode and process, a set of automatical regulation system of the handbrake’s pretightening force was developed.The signal acquisition card was used to collect all kinds of switch signal,the transmission of switch signal was completed through the notifier,implementing the corresponding control functions.The electromagnetic relay was used to implement electromagnetic relay’s circuit on and off and protection.Based on the experimental data,the factors affecting the accuracy of the system were analyzed.Based on the LabVIEW platform,the functions including automatical regulation,inspection,test result’s sharing,inquiring and so on were achieved.
Handbrake pretightening force; Regulation; Acquisition card; Electromagnetic relay; LabVIEW
2017-05-27
寧忠麟(1983—),男,學(xué)士,工程師,主要從事汽車制動系統(tǒng)設(shè)計。E-mail:719343354@qq.com。
10.19466/j.cnki.1674-1986.2017.10.007
U270.7
B
1674-1986(2017)10-029-04
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06