混合動力電動汽車通信設計
2017-11-07 01:13:12胡艷峰
汽車電器 2017年10期
關鍵詞:發動機
唐 鍵,胡艷峰
(陜西重型汽車有限公司,陜西 西安 710200)
混合動力電動汽車通信設計
唐 鍵,胡艷峰
(陜西重型汽車有限公司,陜西 西安 710200)
詳細介紹混合動力電動汽車的基本概念、分類、拓撲以及CAN通信設計,并給出了通信設計中的信號說明。
混合動力電動汽車;概念;分類;拓撲;CAN通信設計
基于清潔能源及環境保護的需要,電動汽車將會在人類生活中扮演越來越重要的角色。電動汽車以其零排放、環境友好的特點,受到廣泛的認可與關注。但是電動汽車也存在一個硬傷,即一次充滿電的續駛里程比較短,且由于充電站設施的不完善,使得電動汽車沒電后不能像傳統燃油車一樣,能很快得到電能補充。這個問題很大程度上限制了電動汽車的快速普及。基于此類原因,混合動力電動汽車應運而生。混合動力電動汽車既能很大程度上減少排放,又能彌補純電動汽車續駛里程方面的不足,因此也是新能源車輛領域關注的一個焦點。尤其是在大、中、重型商用車領域,由于車貨總質量大的因素,想要實現完全純電動零排放,技術上雖然可行,但實際使用效果并不理想,對大部分用戶而言,純電動汽車不但昂貴,而且使用受限制,因此無法快速普及。本文將針對混合動力電動汽車的CAN通信設計來展開介紹。
1 混合動力汽車基本概念
混合動力電動汽車(HEV)是指有多種動力參與汽車驅動,一般指的是燃油發動機和驅動電機這2種動力。混合動力系統主要由整車控制器、發動機控制器、發動機、電機控制器、驅動電機、電池管理系統、動力電池等組成。車輛行走可單獨由驅動電機或發動機驅動,此時動力源為驅動電機或發動機。車輛行走也可由驅動電機和發動機共同驅動,此時動力源為驅動電機和發動機二者協調作用。整車控制器為系統核心,協調整車電機控制器、電池管理系統、自動變速器控制器、發動機控制器等協調工作。整個系統可以根據需求配備單電機系統或者雙電機系統。
2 混合動力汽車分類
混合動力汽車按照不同分類標準會有不同的分類。本文中根據混合動力電動汽車零部件的種類、數量和連接關系,將其分為3類[1]:①串聯式混合動力電動汽車;②并聯式混合動力電動汽車;③混聯式混合動力電動汽車。下面分別介紹這3種類型的混合動力電動汽車。
2.1 串聯式混合動力電動汽車
串聯式混合動力電動汽車系統結構如圖1所示。串聯式結構是由發動機、發電機和驅動電機3大主要部件總成組成的。發電機僅僅用于發電,發電機發出的電能通過驅動電機控制器直接輸送給驅動電機,由驅動電機驅使汽車行走。當電池組電量充足時,電池組直接向驅動電機提供能量驅使汽車行走;當電池組電量不足時,發動機帶動發電機發電向電池充電,來延長混合動力電動汽車的續駛里程。

圖1 串聯式混合動力電動汽車結構示意圖
2.2 并聯式混合動力電動汽車
并聯式混合動力電動汽車系統結構如圖2所示。該結構主要由發動機、驅動電機/發電機2大部件總成構成。其有多種組合形式,可以根據使用要求選用,且2大動力總成的功率可以互相疊加。其優點是行程比串聯式混合動力電動汽車要長一些,且更加趨近于內燃機汽車。
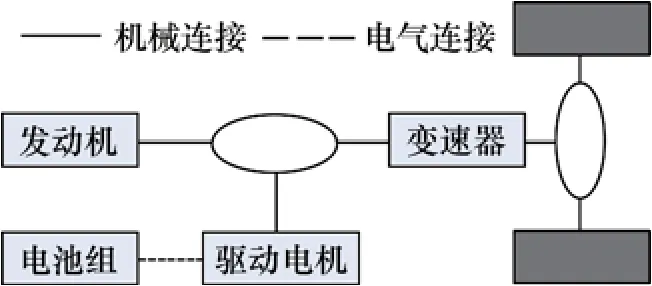
圖2 并聯式混合動力電動汽車結構示意圖
2.3 混聯式混合動力電動汽車
混聯式驅動系統是串聯式和并聯式的綜合,其結構示意圖如圖3所示。發動機發出的功率一部分通過機械傳動輸送給驅動橋,另一部分則驅動發電機發電。發電機發出的電能輸送給驅動電機或電池組,驅動電機產生的驅動力矩通過動力復合裝置傳送給驅動橋。混聯式驅動系統的控制策略是:在汽車低速行駛時,驅動系統主要以串聯方式工作;當汽車高速穩定行駛時,驅動系統則以并聯工作方式為主。
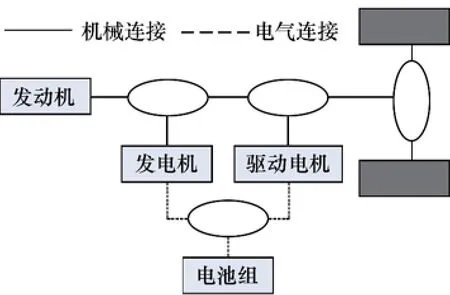
圖3 混聯式混合動力電動汽車結構示意圖
本文主要基于商用車,就串聯式和并聯式2種混合動力電動汽車進行通信設計說明。
3 混合動力汽車CAN總線拓撲
3.1 串聯式混合動力電動汽車CAN總線拓撲
串聯式混合動力汽車,汽車行業內也稱為增程式電動汽車,指整車配備有輔助動力單元(APU,也稱為增程器)的電動汽車。增程器系統包括APU控制器、發電機及發電機控制器、發動機及發動機控制器。增程器的作用是:在電池電量不足的情況下,開啟增程器發電給電池充電,從而達到增加整車續駛里程的目的。增程式電動汽車中,發動機不直接驅動車輛運行,而是通過發電機發電給電池充電,由驅動電機直接驅動車輛運行。從這里可以看出,增程式電動汽車,本質上是串聯式混合動力汽車。對整車而言,增程器是作為一個整體而存在的,即增程器是作為一個節點掛在整車網絡上。如圖4所示,虛線框內的部分即為整個增程器系統,作為一個節點掛在整車CAN網絡上。發電機控制器和發動機控制器只存在增程器系統內部CAN網絡上,和整車控制器不直接通信,信息交互需要通過增程器控制器。

圖4 并聯式混合動力汽車拓撲
3.2 并聯式混合動力電動汽車CAN總線拓撲
由并聯式混合動力汽車的概念可知,整車配備有發動機、驅動電機2種驅動源。當電池電量充足時,由驅動電機驅動車輛行駛;當電池電量不足時,發動機工作直接驅動車輛行駛或與驅動電機一起驅動車輛行駛。對整車而言,發動機是作為一個單獨節點掛在整車網絡上的,與整車控制器之間可以直接進行信息交互,如圖5所示。
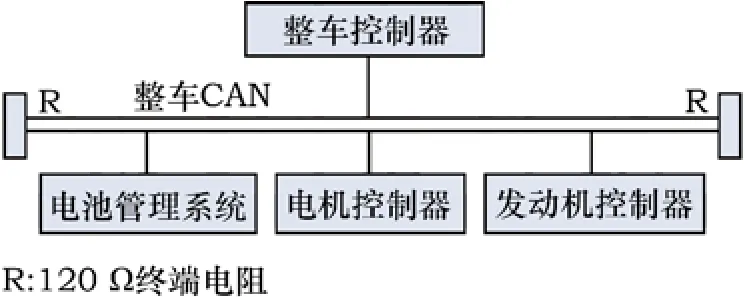
圖5 并聯式混合動力汽車拓撲
4 混合動力汽車CAN總線通信設計
4.1 串聯式混合動力電動汽車
串聯式混合動力電動汽車中,增程器是作為一個節點掛在整車網絡上,因此信息的交互只存在于整車控制器和增程器控制器二者之間。增程器內部通信網絡中,發動機控制器、發電機控制器與增程器控制器之間分別進行信息交互。整車如果想要知道發動機或發電機的相關總線信息,必須通過增程器控制器轉發。同樣,整車控制器對發電機及發動機的控制,也轉化成對增程器系統的控制,因此發動機、發電機的具體控制都由增程器控制器來進行。串聯式中整車控制器與增程器控制器、驅動電機控制器之間信息交互見表1。
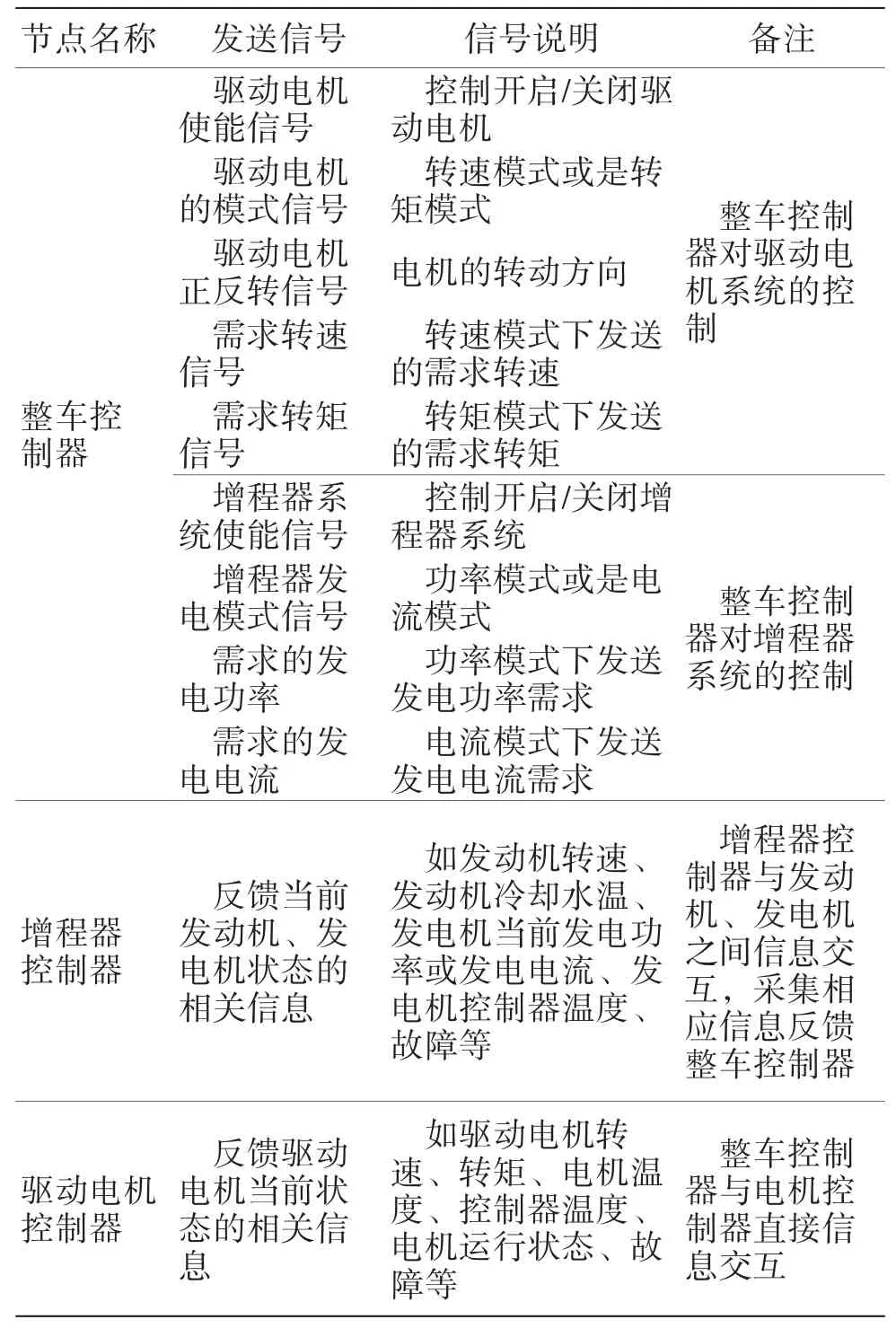
表1 串聯式信息交互
從表1可以看出,對于串聯式,整車控制器是對驅動電機控制器和增程器控制器進行協調控制,從而確保整車的運行。而對增程器系統內部的通信、控制方式不去關注。整車只要提出想要關心的信息,讓增程器控制器反饋即可。發動機的開啟和關閉均由增程器控制器來控制。
4.2 并聯式混合動力電動汽車
并聯式混合動力電動汽車中,發動機作為一個獨立節點掛在整車網絡上。因此,整車控制器需要同時對發動機和驅動電機進行協調控制。并聯式中整車控制器與發動機控制器、驅動電機控制器之間信息交互見表2。
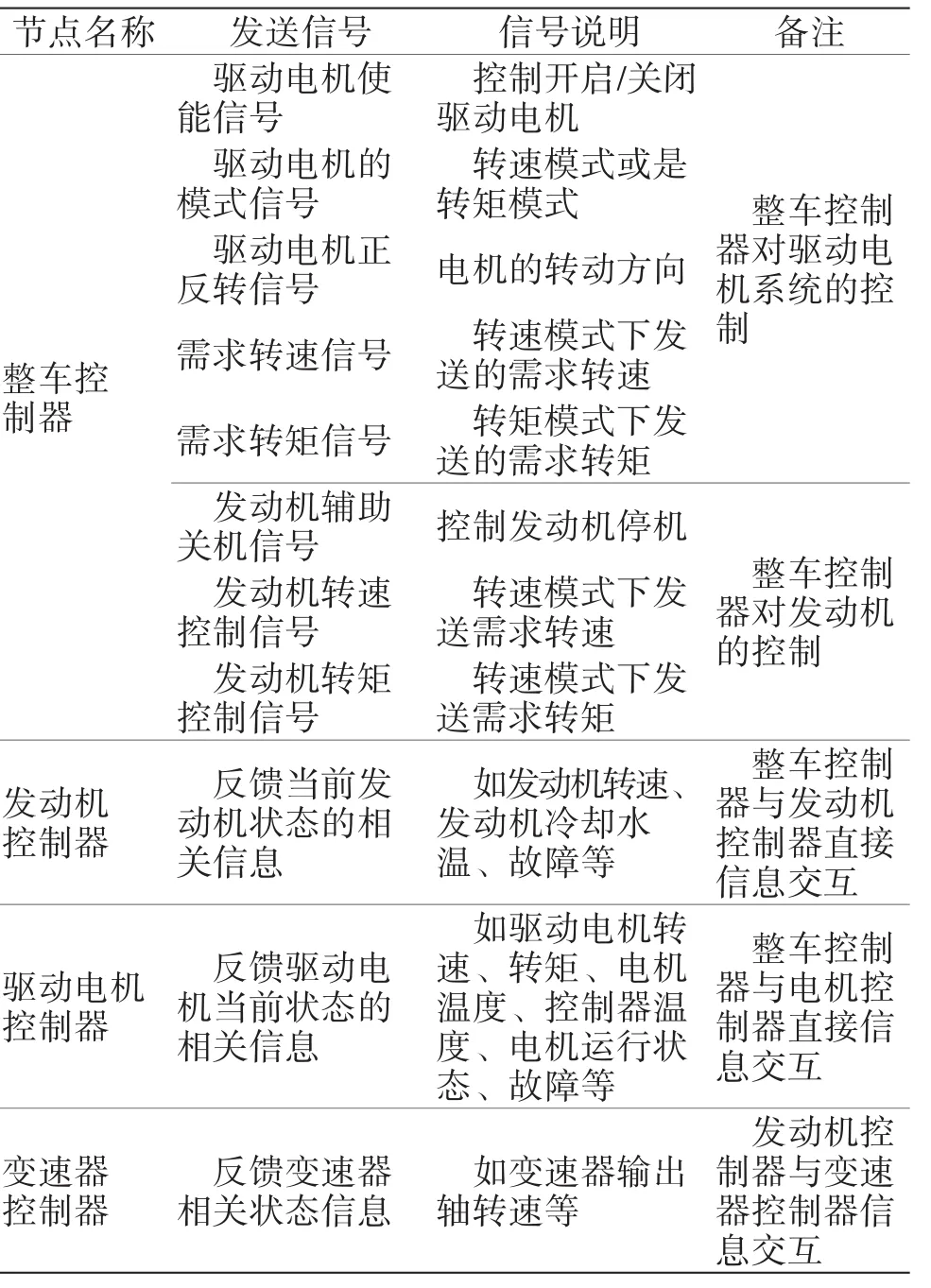
表2 并聯式信息交互
從表2可以看出,并聯式混合動力電動汽車,整車控制器對發動機和驅動電機進行協調控制,而整車控制器直接對發動機控制。由于傳統燃油車型中并沒有整車控制器,發動機廠家開放的是其它的控制單元,例如濰柴發動機開放的控制節點是變速器。因此,整車控制器想要控制發動機,目前需借用燃油車發動機已經開放的發動機控制報文。SAE J1939標準對發動機的相關報文都給出了明確的規定,各個商用車的發動機廠家都是按照該標準執行的,因此整車控制器借用對發動機的控制報文也應該遵循該標準,否則發動機控制器將無法識別。
這里有2點要注意:一是表2中只是給出了發動機的停機信號命令,并沒有給出發動機的起動信號命令。這是因為在并聯式混合動力電動汽車驅動行駛中,低速情況下只需要驅動電機驅動即可;在高速穩定行駛情況下,當驅動電機驅動能力不足時,驅動電機會帶動發動機起動,隨后發動機將參與到驅動整車行駛。二是變速器控制器發出的變速器輸出軸轉速信號的作用,是為了對發動機進行保護。這是因為并聯式中發動機的起動一般都是在車輛已經起動后才開啟的,因此起動后需要發動機能夠立刻輸出扭矩,跳過怠速控制模式而直接進入驅動模式。變速器輸出軸轉速大于0表明在行車狀態,因此發動機可以根據此信號的反饋值進入合理的控制方式。
5 混合動力電動汽車CAN報文定義
首先來整理涉及到的節點,節點詳細信息見表3。

表3 節點信息
5.1 串聯式
串聯式混合動力電動汽車信號見表4。
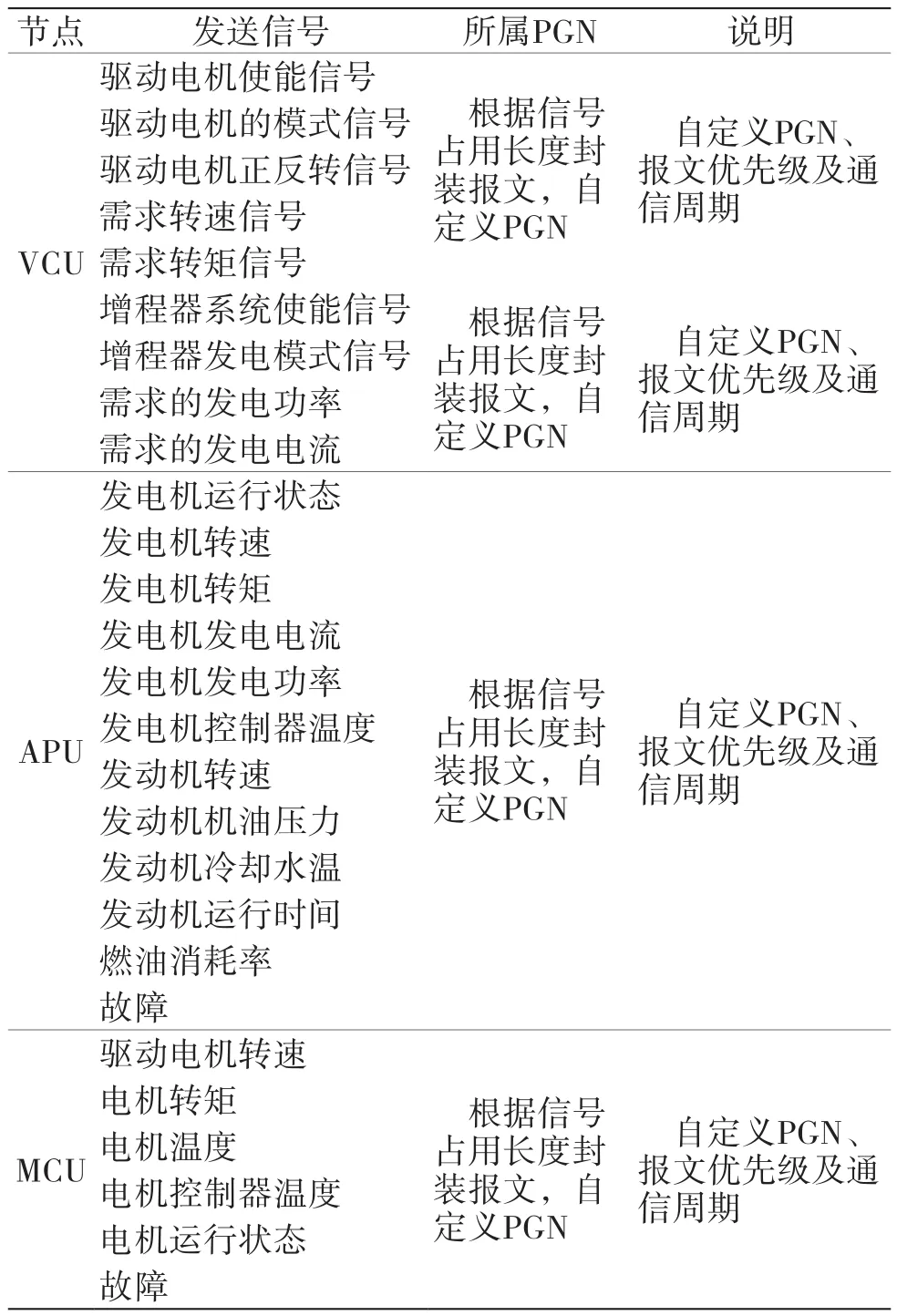
表4 串聯式信號列表
由表4可以看出,PGN都要自定義。自定義PGN要注意,應在SAE J1939的PGN預留區進行分配,并根據信號的刷新速率的要求,最終給出合理的PGN、優先級及通信周期。
5.2 并聯式
并聯式混合動力電動汽車信號見表5。

表5 并聯式信號列表
由表5可以看出,除發動機PGN,其它都要自定義。發動機PGN標準已有規定[2],按規定執行即可。發動機信號有一點要注意的是,發動機運行時間所在的PGN,通信周期是On request,要想獲得這個報文的信息,需要發送請求PGN來請求發動機控制器發送(詳細介紹見第6章)。
6 請求PGN
SAE J1939-21數據鏈路層中規定了目前共支持5種類型的消息,分別為:命令、請求、廣播/響應、確認和組功能[3]。消息的具體類型可由其分配的參數組編號(即PGN)識別。CAN數據幀數據域中的多字節參數,先存放最低字節。上述的要想獲得發動機運行時間這個信號,就需要用到請求類型的消息。
請求類型的消息提供了從全局范圍或從特定目標地址請求信息的能力。對特定目標地址的請求稱為指向特定目標地址的請求。請求PGN的定義見表6。

表6 請求PGN定義
在這里,是整車控制器請求獲得發動機運行時間信號,PGN為(65253)10=(00FEE5)16,理論上請求報文應該見表7。

表7 整車控制器請求報文
表7中,標識符為18EA00D0,表示優先級6級,整車控制器(源地址D0)請求發動機控制器(源地址0)發送請求的PGN信息,理論上是可行的。但是,由于目前的發動機廠家都沒有開放對源地址D0的相應信息,表7中的請求報文發動機根本無法識別。因此,需要具體情況具體對待,借用發動機開放識別源地址進行請求。例如玉柴的某款發動機可以識別的是源地址是21的請求報文,因此表7中標識符應該為18EA0021,這樣才可以正確獲得想要的請求信息。
在這里需要指出的一點是,串聯式混合動力電動汽車中,整車如果想要知道發動機運行時間信息,則要求增程器控制器上報即可。在增程器系統的內部,由增程器控制器來發送請求報文以獲得發動機運行時間信號。
7 結束語
本文主要就串聯式和并聯式混合動力電動汽車電氣系統的設計來展開說明,并詳細介紹CAN通信設計。混合動力電動汽車的整車控制是今后深入學習的一個方向,希望對有需要的人能有一定的幫助。
[1] 崔勝民.新能源汽車技術[M].北京:北京大學出版社,2009.
[2] SAE J1939-71,Vehicle Application Layer[S].
[3] SAE J1939-21,Data Link Layer[S].
(編輯 凌 波)
Hybrid Electric Vehicle CAN Communication Design
TANG Jian,HU Yan-feng
(Shanxi Heavy-duty Automobile Co.,Ltd.,Xi’an 710200,China)
This article describes basic concepts,classification,topology and CAN communication design of hybrid electric vehicles.
hybrid electric vehicle;concept;classification;topology;CAN communication design
U469.72
A
1003-8639(2017)10-0004-05
2016-12-12
唐鍵(1985-),男,工程師,主要從事汽車電器設計和汽車總線系統設計工作;胡艷峰(1986-),女,工程師,主要從事汽車總線系統設計及測試工作。
猜你喜歡
汽車維修與保養(2021年8期)2021-02-16 00:28:30
汽車維修與保養(2021年8期)2021-02-16 00:28:18
汽車維修與保養(2020年11期)2020-06-09 05:42:06
民用飛機設計與研究(2019年2期)2019-08-05 01:33:40
汽車維護與修理(2016年3期)2016-02-28 13:16:54
汽車維修與保養(2015年1期)2015-04-17 03:25:30
汽車與新動力(2015年1期)2015-02-27 12:11:01
汽車與新動力(2014年6期)2014-02-27 12:10:49
汽車與新動力(2014年5期)2014-02-27 12:10:41
汽車與新動力(2014年2期)2014-02-27 12:10:15