火星稀薄大氣環(huán)境下的四旋翼無人機動力系統(tǒng)初步研究
2017-11-06 07:40:36劉洋洋向樹紅唐振宇任瓊英王俊峰
航天器環(huán)境工程 2017年5期
劉洋洋,向樹紅,唐振宇,趙 華,任瓊英,李 昊,王俊峰
(1. 北京衛(wèi)星環(huán)境工程研究所;2. 北京衛(wèi)星環(huán)境工程研究所 可靠性與環(huán)境工程技術(shù)重點實驗室:北京 100094)
火星稀薄大氣環(huán)境下的四旋翼無人機動力系統(tǒng)初步研究
劉洋洋1,2,向樹紅1,2,唐振宇1,趙 華1,2,任瓊英1,李 昊1,王俊峰1
(1. 北京衛(wèi)星環(huán)境工程研究所;2. 北京衛(wèi)星環(huán)境工程研究所 可靠性與環(huán)境工程技術(shù)重點實驗室:北京 100094)
火星的低氣壓環(huán)境為飛機可能應(yīng)用于火星探測創(chuàng)造了條件。四旋翼飛機具有結(jié)構(gòu)簡單、可靠性高、可空中懸停、可重復(fù)起降等眾多優(yōu)勢,成為火星探測應(yīng)用的研究方向之一。文章針對火星四旋翼無人機關(guān)鍵的動力系統(tǒng),用二維CFD仿真軟件建立了螺旋槳模型,仿真分析了槳葉傾角、轉(zhuǎn)速和半徑等因素對槳葉升力的影響,并進行了螺旋槳初步方案設(shè)計。針對方案還開展了稀薄大氣環(huán)境下的試驗,測試了螺旋槳的升力,獲得了與仿真分析一致的結(jié)果。文章研究可為火星四旋翼無人機動力系統(tǒng)進一步細化設(shè)計提供參考。
火星;四旋翼無人機;動力系統(tǒng);初步研究
0 引言
火星的大氣稀薄,僅相當于地球30~35 km高空的大氣壓強,但這仍使得在火星上使用空氣動力航空器成為可能[1]。火星航空器的概念自20世紀70年代就已被提出[2],早期的研究多集中在以噴氣式發(fā)動機為動力的固定翼飛機[3-5]和共軸反槳的直升機[6]等。對于噴氣式發(fā)動機的固定翼飛機,為了提供足夠升力,要求飛行速度非常高,不利于火星探測任務(wù);對于共軸反槳的直升機,由于結(jié)構(gòu)非常復(fù)雜,實現(xiàn)難度很大。
鑒于此,本文提出了四旋翼火星無人機的概念。四旋翼飛機結(jié)構(gòu)簡單,可靠性高;可以實現(xiàn)空中懸停,有利于定點探測;使用電能為螺旋槳提供動力,方便長時間多次起降。針對四旋翼無人機的概念開展初步研究,確定其總體參數(shù),包括總功率1300 W的需求。選用直流無刷電機作為動力方案,每臺電機的功率只需300 W多一點。在此基礎(chǔ)上,特別對動力系統(tǒng)(螺旋槳)進行較深入的研究,針對槳葉傾角、轉(zhuǎn)速和半徑等參數(shù)對槳葉升力的影響,開展二維CFD仿真分析;根據(jù)仿真分析的結(jié)果,初步完成螺旋槳的方案設(shè)計;開展稀薄大氣環(huán)境下的樣機升力測試試驗,并與仿真結(jié)果進行對比分析。
1 四旋翼飛機螺旋槳方案的二維CFD仿真
1.1 仿真模型建立
圖1所示是螺旋槳的氣體流動圖。為了模擬螺旋槳的氣動特性,需要對螺旋體進行三維建模和計算流體力學(xué)仿真,但建模非常復(fù)雜,針對各種工況的計算量也非常大。因此,在探索其運動規(guī)律的基礎(chǔ)上需對其進行簡化。

圖1 三維螺旋槳的氣體流動特性示意和簡化分析模型Fig. 1 Sketch of gas flow characteristics of 3D propellers and model for simplified analysis
沿徑向在螺旋槳半徑r處截取一個截面(如圖1(b)所示)進行氣動分析。螺旋槳的轉(zhuǎn)速為ω,來流氣體的速度為v,則v=ωr。針對截取的該截面,可以簡化為一個具有固定來流速度v的二維流動工況。我們可以通過設(shè)計一系列不同來流速度v和不同槳葉傾角α以覆蓋多種飛行工況,開展螺旋槳的初步設(shè)計。速度在 35~150 m/s范圍設(shè)置了 11個值,傾角在5°~15°之間設(shè)置了11個值,進行組合設(shè)計分析,共開展了121個工況的計算。初步設(shè)計時,螺旋槳的葉片選用 NACA6412翼形。該翼形10°傾角工況的計算網(wǎng)格劃分如圖2所示。
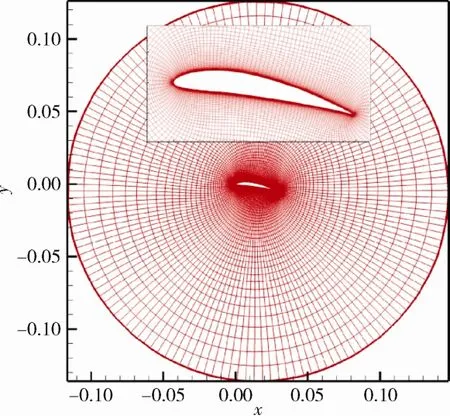
圖2 10°傾角工況計算網(wǎng)格Fig. 2 Mesh for the case of 10° angle of inclination
仿真計算中,來流氣體成分為CO2,其壓強設(shè)置為700 Pa,溫度為225 K。圖3顯示了葉片傾角10°、來流速度150 m/s組合工況下氣體壓強分布仿真結(jié)果,在獲得氣體壓強分布后,再通過積分獲得該組合工況下槳葉所受的力,計算得到:水平方向的阻力為1.19 N/m,垂直方向的升力為4.80 N/m。由于力是按照z方向上以單位長度 1 m進行統(tǒng)計的,故單位為N/m。

圖3 10°傾角和150 m/s速度組合工況下的氣體壓強分布及葉片受力統(tǒng)計Fig. 3 Pressure distribution and blade force for the case of 10°angle of inclination and 150 m/s of speed
1.2 螺旋槳仿真分析及設(shè)計
升力是螺旋槳設(shè)計最關(guān)鍵的參數(shù)指標,阻力表征電機帶動螺旋槳轉(zhuǎn)動所需克服的力,因此又常將升力FL與阻力FD的比值(升阻比FL/FD)作為螺旋槳設(shè)計的重要參數(shù)。將各個組合工況的升力、阻力及升阻比進行統(tǒng)計與處理,可以得到它們隨速度和傾角變化的二維分布。圖4顯示了升阻比隨著來流速度和葉片傾角的變化,圖中網(wǎng)格節(jié)點即為每個計算點,由于計算點比較離散,所以圖中部分等值線出現(xiàn)了折線。
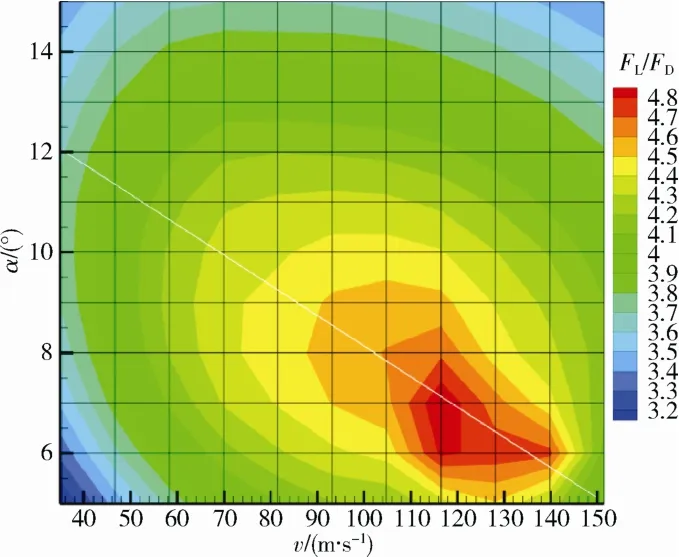
圖4 來流速度與葉片傾角對升阻比影響仿真結(jié)果Fig. 4 Simulation results of influence of inflow velocity and blade angle on lift-drag ratio
根據(jù)v=ωr,圖4中的來流速度變化反映了半徑的變化,一旦來流速度確定,便可以確定半徑。選取圖中升阻比最大的一條曲線(圖中的白色曲線)進行分析計算,可得到在這種半徑?傾角組合下的升力、阻力的關(guān)系,如圖5所示。可以看出,升力和阻力的曲線基本呈線性變化,因此可以使用直線對其進行擬合,擬合結(jié)果如圖中虛線所示,其擬合方程分別為:

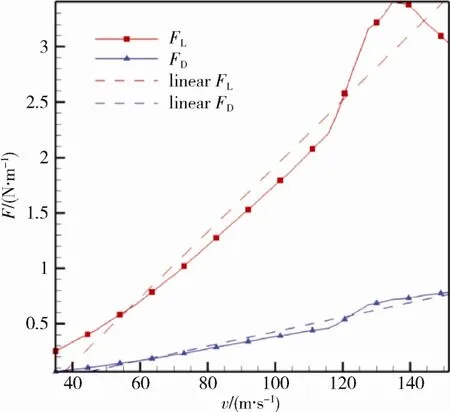
圖5 升力與阻力隨來流速度變化關(guān)系及其線性擬合結(jié)果Fig. 5 The relationship and linear fitting results of lift and drag forces against inflow velocity
式中:r1表示槳葉面的起始點;r2表示槳葉的最大半徑。近似計算中,可令r1為0。由式(3)可知,單個槳葉的總升力是槳徑和轉(zhuǎn)速的函數(shù)。同時還要考慮到槳尖的最大來流速度不應(yīng)超過聲速,即要求Mach數(shù)盡量小于1,通過計算可得到槳半徑r的范圍為 0.15~0.7 m,轉(zhuǎn)速n的范圍為 2000~10 000 r/min,槳葉總升力和槳尖Mach數(shù)的分布如圖6所示。
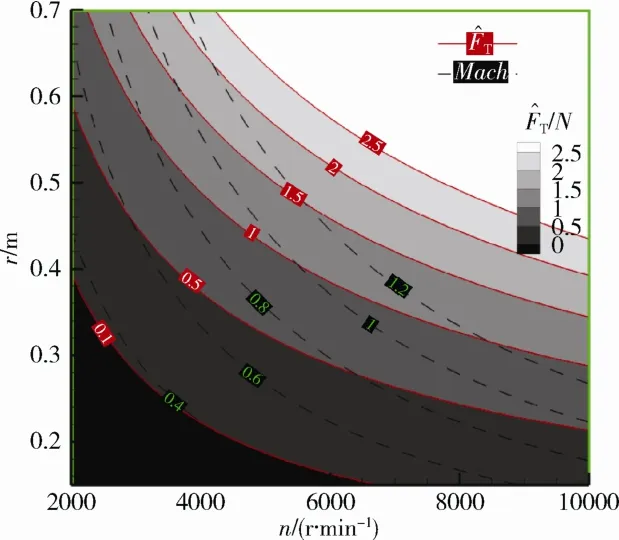
圖6 積分獲得的槳葉總升力與槳尖Mach數(shù)分布Fig. 6 The lift force of blade and Mach number distribution obtained through integration
圖 6表示了槳的半徑與其轉(zhuǎn)速的不同組合對槳葉的升力的影響,可以利用圖示結(jié)果對螺旋槳開展設(shè)計。從圖6中取出縱坐標(半徑)為0.4、0.5、0.6 m的3條橫線上對應(yīng)的升力與轉(zhuǎn)速的值,即可得到這 3種尺寸槳的升力隨轉(zhuǎn)速的變化關(guān)系,如圖 7所示。結(jié)合圖6中的Mach數(shù)分布,可以確定不同尺寸的槳葉最高轉(zhuǎn)速,圖7即針對不同尺寸的槳葉標示出其許用的轉(zhuǎn)速極限(見圖中紅色箭頭截斷處)。
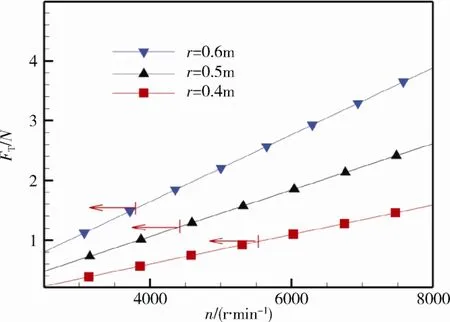
圖7 不同尺寸槳葉的轉(zhuǎn)速與升力關(guān)系Fig. 7 The relationship of blade speed and lift force for different blade sizes
通過以上分析可知,對于0.4~0.6 m半徑的單個槳葉,其升力可達到1~2 N左右;2槳葉則為2~4 N;對于4槳葉,考慮一定的效率損失,可達3~6 N左右。采用四旋翼結(jié)構(gòu),則總的升力為10~24 N左右。火星的重力加速度為3.8 m/s2,則該升力可以提起 2.6~6.6 kg物體。這個質(zhì)量與目前常用的四旋翼無人機質(zhì)量相近,由此可見,四旋翼無人機的動力系統(tǒng)方案可行。
以上仿真計算中只針對一種葉片截面形狀,既沒有考慮其他葉片截面形狀也沒有考慮葉片寬度因素,另外,稀薄大氣環(huán)境下的低雷諾數(shù)流動問題也不可忽略。可見,還有很大的優(yōu)化提高空間,未來有必要進行更細致的優(yōu)化設(shè)計。
2 稀薄大氣環(huán)境下的螺旋槳升力初步測量試驗
根據(jù)仿真分析的結(jié)果,初步設(shè)計制作了螺旋槳樣機并開展升力測量試驗,試驗照片如圖8所示。考慮到運載火箭對航天器的尺寸限制,螺旋槳的半徑初步設(shè)計為0.26 m,傾角14°;槳距約0.37m;槳葉數(shù)量為4,由2個2槳葉的木槳疊加而成。試驗在北京衛(wèi)星環(huán)境工程研究所的真空艙內(nèi)開展。氣體溫度為常溫,氣體成分為大氣,氣壓為1000 Pa。

圖8 稀薄大氣環(huán)境下螺旋槳升力測量試驗Fig. 8 Test of propeller lift in thin atmosphere
采用質(zhì)量稱原理對升力進行測量:螺旋槳轉(zhuǎn)動前測量其質(zhì)量為W0,轉(zhuǎn)動過程中再次測量其質(zhì)量為Wf,則總的升力Ft,exp為

測量結(jié)果如表1所示。從結(jié)果看,螺旋槳的升力可以達到2.2 N。根據(jù)圖6的仿真結(jié)果,當半徑為0.25 m、轉(zhuǎn)速為10 000 r/min時,單個槳葉可產(chǎn)生的升力為0.72 N,則4個槳葉的升力為2.88 N。由于仿真時沒有考慮效率因素,若考慮到效率因素后,可認為仿真與試驗結(jié)果基本一致。
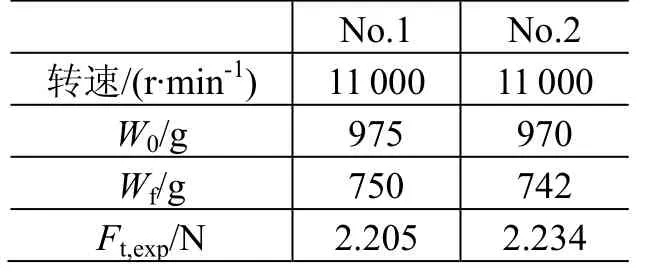
表1 1000 Pa稀薄大氣環(huán)境下螺旋槳升力測量結(jié)果Table 1 The results of propeller lift in 1000 Pa thin atmosphere
3 結(jié)束語
本文針對四旋翼無人機關(guān)鍵的動力系統(tǒng)開展了研究,通過二維CFD仿真建立了槳葉傾角、轉(zhuǎn)速和半徑等因素對槳葉升力影響的關(guān)系,基于此開展了螺旋槳的初步方案設(shè)計。通過在稀薄大氣環(huán)境下螺旋槳升力的測量試驗,進一步驗證了仿真結(jié)果的正確性。仿真計算考慮的因素比較單一,試驗測量手段不夠完善,測量的精度也有待進一步提高,未來還需要繼續(xù)推進該領(lǐng)域的研究工作。
(
)
[1] 歐陽自遠, 肖福根. 火星探測的主要科學(xué)問題[J]. 航天器環(huán)境工程, 2011, 28(3): 205-217 OUYANG Z Y, XIAO F G. Major scientific issues involved in Mars exploration[J]. Spacecraft Environment Engineering, 2011, 28(3): 205-217
[2] 陳金寶, 聶宏, 柏合民, 等. 旋翼著陸器在火星探測中的研究進展[J]. 航天返回與遙感, 2008, 29(1): 6-10 CHEN J B, NIE H, BAI H M, et al. The development of rotary-wing lander for Mars[J]. Spacecraft Recovery &Remote Sensing, 2008, 29(1): 6-10
[3] BRAUN R D, WRIGHT H S, CROOM M A, et al.Design of the ARES Mars airplane and mission architecture[J]. Journal of Spacecraft and Rockets, 2006,43(5): 1026-1034
[4] KUHL C A.Design of a Mars airplane propulsion system for the Aerial Regional-Scale Environmental Survey (ARES) mission concept: NASA/TM-2009-215700[R], 2009
[5] KUHL C A, GAYLE S W, HUNTER C A, et al. Trade study of multiple thruster options for the Mars airplane concept: NASA/TM-2009-215699[R], 2009
[6] SAVU G, OPRISIU C, TRIFU O. An autonomous flying robot for Mars exploration: IAF-93-R.3.445[R], 1993
Preliminary research of the power system for Mars UAV with four rotors in thin atmosphere
LIU Yangyang1,2, XIANG Shuhong1,2, TANG Zhenyu1, ZHAO Hua1,2, REN Qiongying1,
LI Hao1, WANG Junfeng1
(1. Beijing Institute of Spacecraft Environment Engineering;2. Science and Technology on Reliability and Environmental Engineering Laboratory,Beijing Institute of Spacecraft Environment Engineering: Beijing 100094, China)
The hypobaric environment on Mars creates the condition for the aircraft to be used in the Mars explorations. The four-rotor aircraft will be a potential choice in the Mars aircraft investigation because of its simple structure and high reliability, besides, it can also hover in the air, and be able to takeoff and land repeatedly. This paper focuses on the propulsion technology for the Mars four-rotor aircraft, and a 2D-CFD model is established of its propellers. The relationship of the blade inclination, the rotation speed, and the radius with the blade lift is analyzed by the model. The preliminary design of propellers is made based on this relationship. By tests in thin atmosphere, the thrust of propellers is obtained which agrees with the numerical simulation. The results of this paper can provide a theoretical basis for the further design of the dynamic system of the Mars UAV (unmanned aerial vehicle) with four-rotor propellers.
Mars; four-rotor UAV; power system; preliminary research
V476; V412.4
A
1673-1379(2017)05-0478-04
10.3969/j.issn.1673-1379.2017.05.004
2017-02-23;
2017-09-12
劉洋洋, 向樹紅, 唐振宇, 等. 火星稀薄大氣環(huán)境下的四旋翼無人機動力系統(tǒng)初步研究[J]. 航天器環(huán)境工程,2017, 34(5): 478-481
LIU Y Y, XIANG S H, TANG Z Y, et al. Preliminary research of the power system for Mars UAV with four rotors in thin atmosphere[J]. Spacecraft Environment Engineering, 2017, 34(5): 478-481
(編輯:肖福根)
劉洋洋(1991—),女,碩士研究生,研究方向為航天器特殊環(huán)境工程;E-mail: lyycasc@163.com。指導(dǎo)教師:向樹紅(1963—),男,研究員,博士生導(dǎo)師,主要從事航天器動力學(xué)環(huán)境模擬和試驗技術(shù)研究。
