線性自抗擾控制器在PCR儀溫控系統中的應用
2017-11-01 05:00:33劉宏利
化工自動化及儀表 2017年4期
關鍵詞:系統
邵 磊 何 濤 李 季 劉宏利 韓 雪
(天津理工大學自動化學院天津市復雜系統控制理論及應用重點實驗室)
線性自抗擾控制器在PCR儀溫控系統中的應用
邵 磊 何 濤 李 季 劉宏利 韓 雪
(天津理工大學自動化學院天津市復雜系統控制理論及應用重點實驗室)
實時熒光聚合酶鏈反應(PCR)儀在擴增基因檢測過程中,外界干擾對反應溫度的細微變化容易影響測試結果,針對該要求設計一種線性自抗擾控制器,通過實時估計溫度變換中的各種內外擾動,采用特殊的線性反饋機構給予補償,減少過程中受到擾動的影響。
自抗擾控制器 PCR儀 擾動 補償
實時熒光聚合酶鏈反應(PCR)是一種體外核酸擴增技術,將所要研究的目的基因或某一DNA片段于數小時內擴增至百萬倍,使肉眼能直接觀察和判斷。PCR擴增溫度控制系統是基因檢測的一個關鍵控制環節,超出預定溫度的變化范圍都可能致使試驗結果出現差別,不僅對溫度控制的精確度和響應速度有較高要求,而且對試驗過程中的不確定內外擾動有很強的抗擾作用。試驗中,如果退火階段受到干擾,可能出現退火溫度過高,降低擴增效率;如果高溫變性階段受到干擾,極有可能出現假陰性情況。因此,溫度控制中的干擾是亟待解決的問題[1,2]。韓京清提出的自抗擾控制(Active Disturbance Rejection Control,ADRC)技術是一種基于擴張狀態觀測器的新型實用的非線性控制技術,該技術是由PID控制器演變過來的,并采取了PID誤差反饋控制的核心理念,同時將系統中的未建模部分(內擾)和影響輸出的外部擾動(外擾)統合為系統的總擾動,并視為系統的擴張狀態,通過觀測器來估計總擾動并實時調整控制量,從而消除擾動對輸出的影響[3,4]。但這種自抗擾算法調節參數過多且過程比較繁瑣,為了解決這一問題,Zheng Q等將線性化和帶寬概念引入ADRC,提出了線性自抗擾控制,并論證了線性擴張狀態觀測器(ESO)的收斂性和線性自抗擾控制器(LADRC)的穩定性,令控制器帶寬和觀測器帶寬成比例,這樣需要整定的參數變得很少,便于工程實現和調整[5~7]。
筆者將LADRC運用到PCR儀的溫度控制中,首先分析PCR儀溫度變換中各階段溫度的控制范圍與受外界干擾的影響,設計線性二階自抗擾控制器,采用線性觀測器將內外擾動歸為總擾動并予以補償,并實時調整輸出量,減少干擾對試驗的影響,同時與經典PID控制器進行比較,驗證該控制器處理內外干擾問題的優勢。
1 PCR儀溫度控制
1.1 PCR溫度變換過程
PCR儀溫度變換試驗中包括高溫變性、低溫退火和適溫延伸3個階段。在標準反應中包括3種溫度變換,雙鏈DNA在90~95℃變性,再迅速冷卻至40~60℃,引物退火并結合到靶序列上,然后快速升溫至70~75℃,在Taq DNA聚合酶的作用下,使引物鏈沿模板延伸。
達不到變性溫度就不會產生單鏈DNA模板,PCR也就不會啟動。變性溫度低則變性不完全,DNA雙鏈會很快復性,因而減少產量。但溫度不能過高,因為高溫環境對酶的活性有影響,在此步驟如果不能使靶基因模板或PCR產物完全變性,就會導致PCR反應失敗,一般DNA變性溫度在90~95℃范圍內選取,樣品一旦達到此溫度宜迅速冷卻到退火溫度。
退火溫度是影響PCR特異性的較重要因素。變性后溫度快速冷卻至40~60℃,使引物和模板結合。由于模板DNA比引物復雜得多,引物和模板之間的碰撞結合機會遠高于模板互補鏈之間的碰撞。溫度高特異性強,但過高則引物不能與模板牢固結合,DNA擴增效率下降;溫度低產量高,但過低會造成引物與模板錯配,非特異性產物增加。
引物延伸溫度的選擇取決于Taq DNA聚合酶的最適溫度,一般取70~75℃,在72℃時酶催化核苷酸的標準速率每秒可達35~100個。過高的延伸溫度不利于引物和模板的結合[8]。
1.2 溫度控制算法
PCR檢測方法對反應過程的溫度控制有著極高的要求[9]。目前,國內外在PCR儀中使用的溫度控制算法有直接數字控制(DDC)、先進PID控制、預測控制以及模糊控制(Fuzzy)等。這些方法在控制精度和動態響應變化上也在逐漸改進驅于成熟,但由于負載的發熱功率、風道氣流、加熱腔體吸放熱與加熱腔內部存在不確定的干擾因素,再加上環境溫度的影響,會造成某些不確定的內外擾動,因此對控制方法提出了更高的要求。采用LADRC技術,在保證控制精度要求和響應速度的同時,可以實時估計內外不確定擾動總和,消除擾動對輸出的影響,提高了PCR檢測的準確性,也提高了儀器的整體性能。
2 自抗擾控制器的設計
2.1 自抗擾控制器模型
自抗擾控制器是一種新型控制器,典型的自抗擾控制器模型如圖1所示,主要由跟蹤微分器(Tracking Differentiation,TD)﹑擴張狀態觀測器(Extended State Observer,ESO)和非線性誤差反饋規律(Nonlinear State Error Feedback,NSEF)3部分構成,其核心是ESO。對于設定值v(t),TD安排過渡過程v1并給出過程的微分信號v2,e1和e2為過渡過程v1和系統估值z1之間的誤差及其微分;u(t)為系統的控制量;y(t)為系統的輸出量,z1﹑z2能很好地跟蹤對象輸出y(t)及其微分;z3估計出對象擾動的總和;w(t)為外擾[10]。
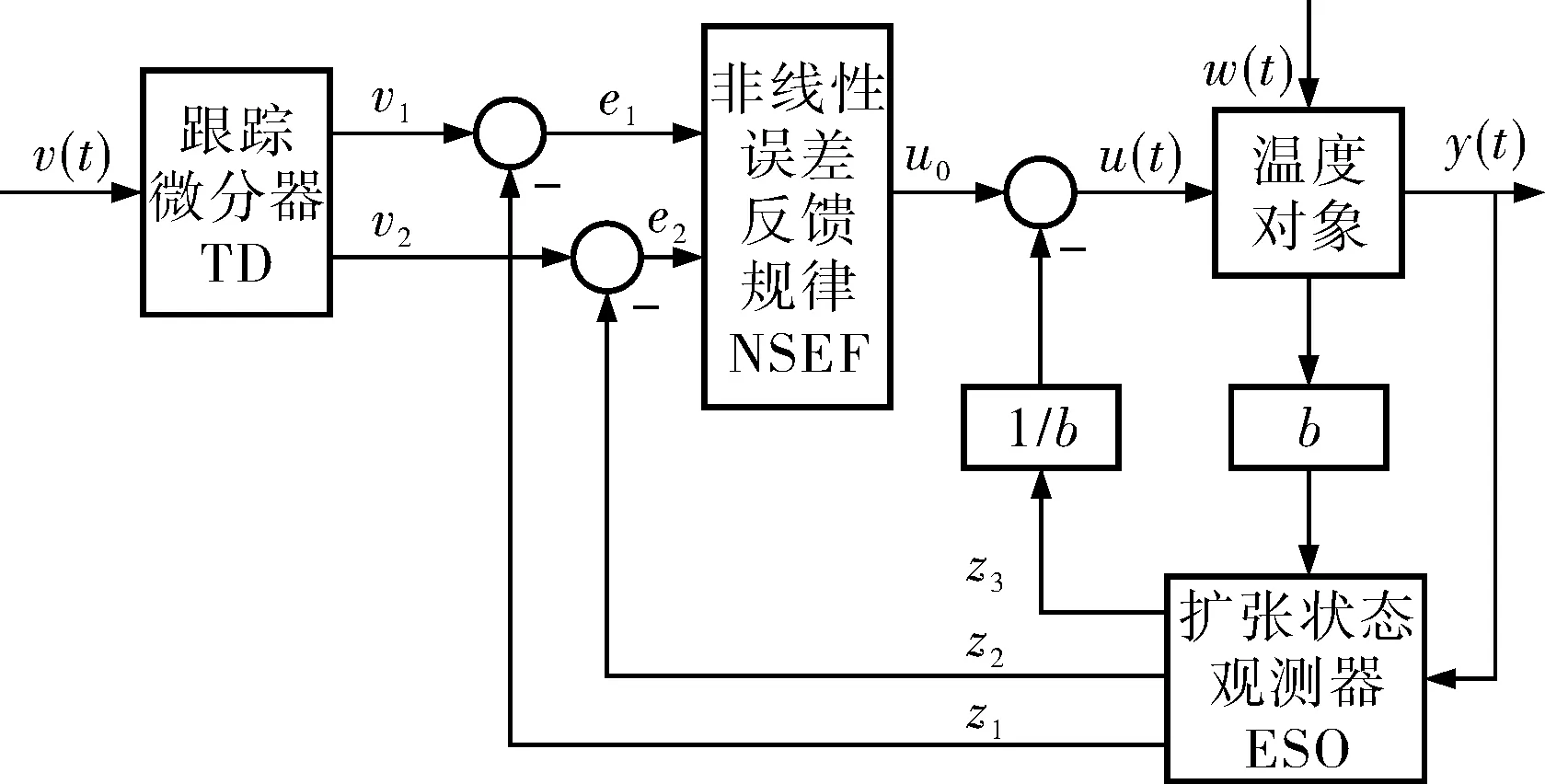
圖1 典型的自抗擾控制器模型
2.2 線性自抗擾控制器(LADRC)
在解決實際問題時,由于非線性函數的存在,使得控制器參數很多,不易調試,在輸出的量測環節不可避免地會引入噪聲干擾,而采用LADRC,不僅可以將這些噪聲并入總抗擾,同時所調節參數也不多。
LADRC省去了跟蹤微分器,而ESO和NSEF也都采用了線性函數,構成了簡化的自抗擾控制器,這里以二階系統為例,其結構框圖如圖2所示,其中kd為控制器帶寬。
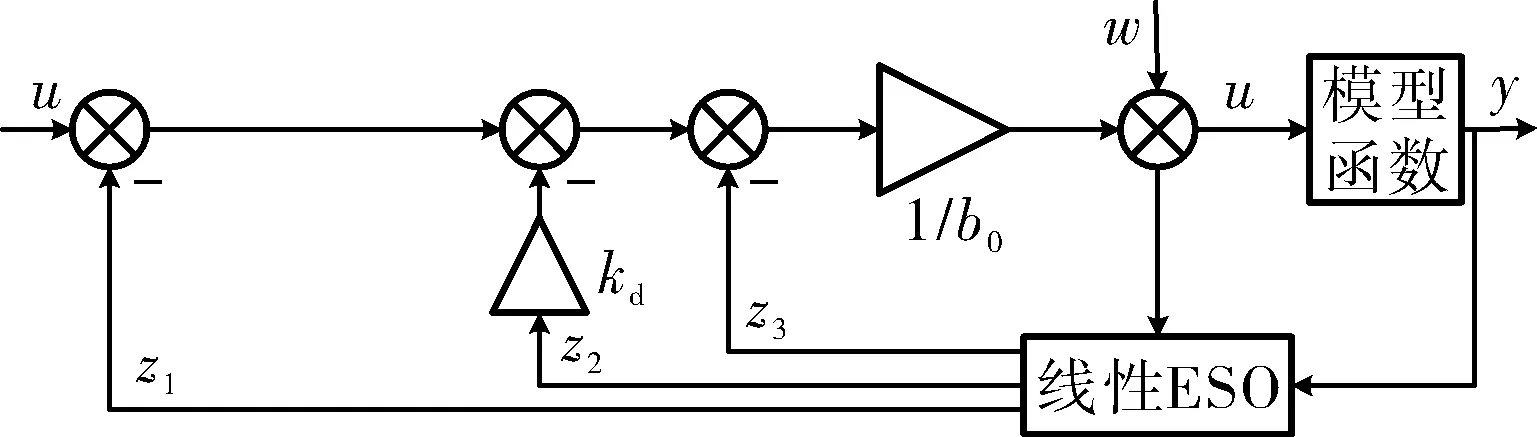
圖2 二階LADRC結構框圖
以二階系統為被控對象,有:
(1)
式中b0——相對增益(模型輸入信號的系數);
t——時間函數;
u——輸入信號;
w——擾動信號;
x——狀態量;
x′——輸入信號的一階導數;
x″——輸入信號的二階導數;
y——輸出。
將式(1)變為狀態空間方程形式:
Bs=[0b00]T
Cs=[1 0 0]
D=[0 0 1]T
其中f′為系統總擾動估計值,x=[x1,x2,x3]T為狀態向量,x1=x,x2=x′,x3=f′。
采用線性ESO,有:
(2)

C=I3×3
D=03×3
對于二階系統,通過調整kd、b0和w0來保證整個系統的穩定[11]。
3 PCR儀溫度仿真
對于某PCR溫度控制系統,將測溫、內部變化和執行機構等效為傳遞函數[12],即:
搭建Simulink模型如圖3所示。
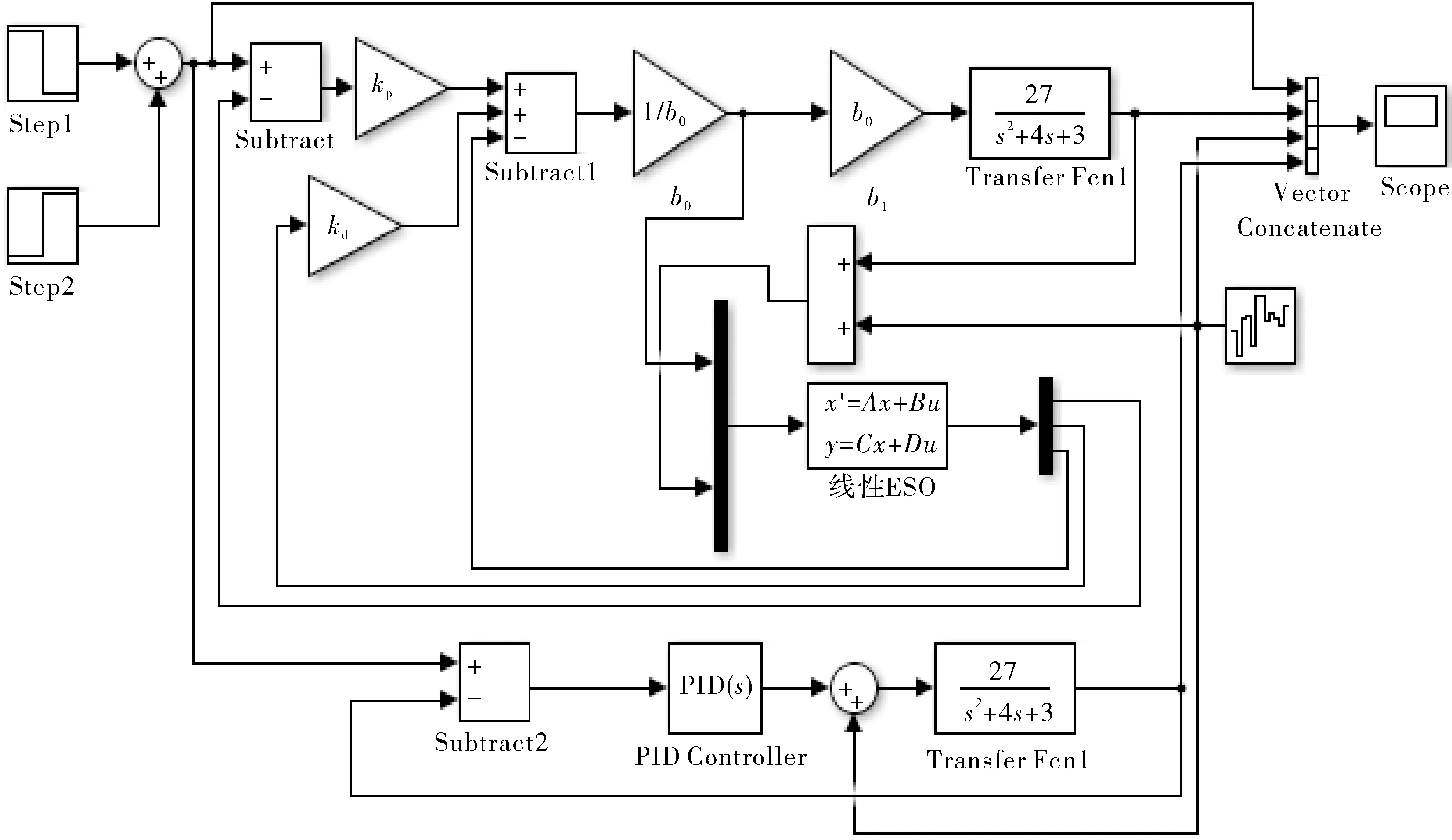
圖3 Simulink仿真模型
本設計采用3個跳變的階躍信號來模擬PCR反應曲線(圖4),LADRC控制和PID控制方法對模型進行控制,在同一階躍信號下的控制輸出信號,如圖4所示。
設計兩種大小不同的不確定干擾,分別如圖5、6所示。第1種干擾擾信號主要加在變性階段給出1~2℃的干擾信號,用來模擬PCR儀實際試驗中加熱裝置和加熱負載的影響。第2種抗擾是在每個階段加上時間隨機,大小在±3℃內的干擾信號,主要模擬PCR儀在進行溫度試驗中遇到的不確定不可估量的干擾源和外界溫度變化的影響。
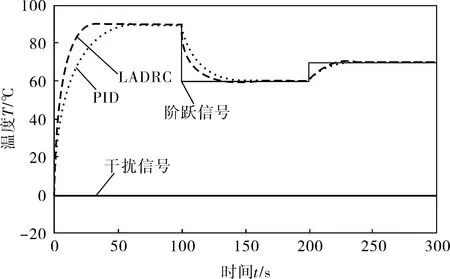
圖4 兩種控制下的溫度輸出曲線
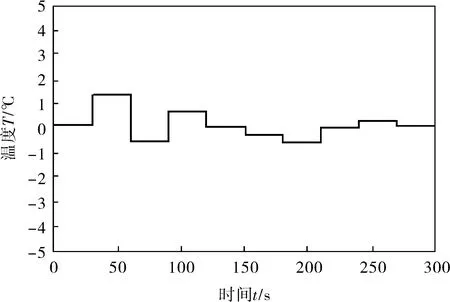
圖5 第1種小振蕩擾動
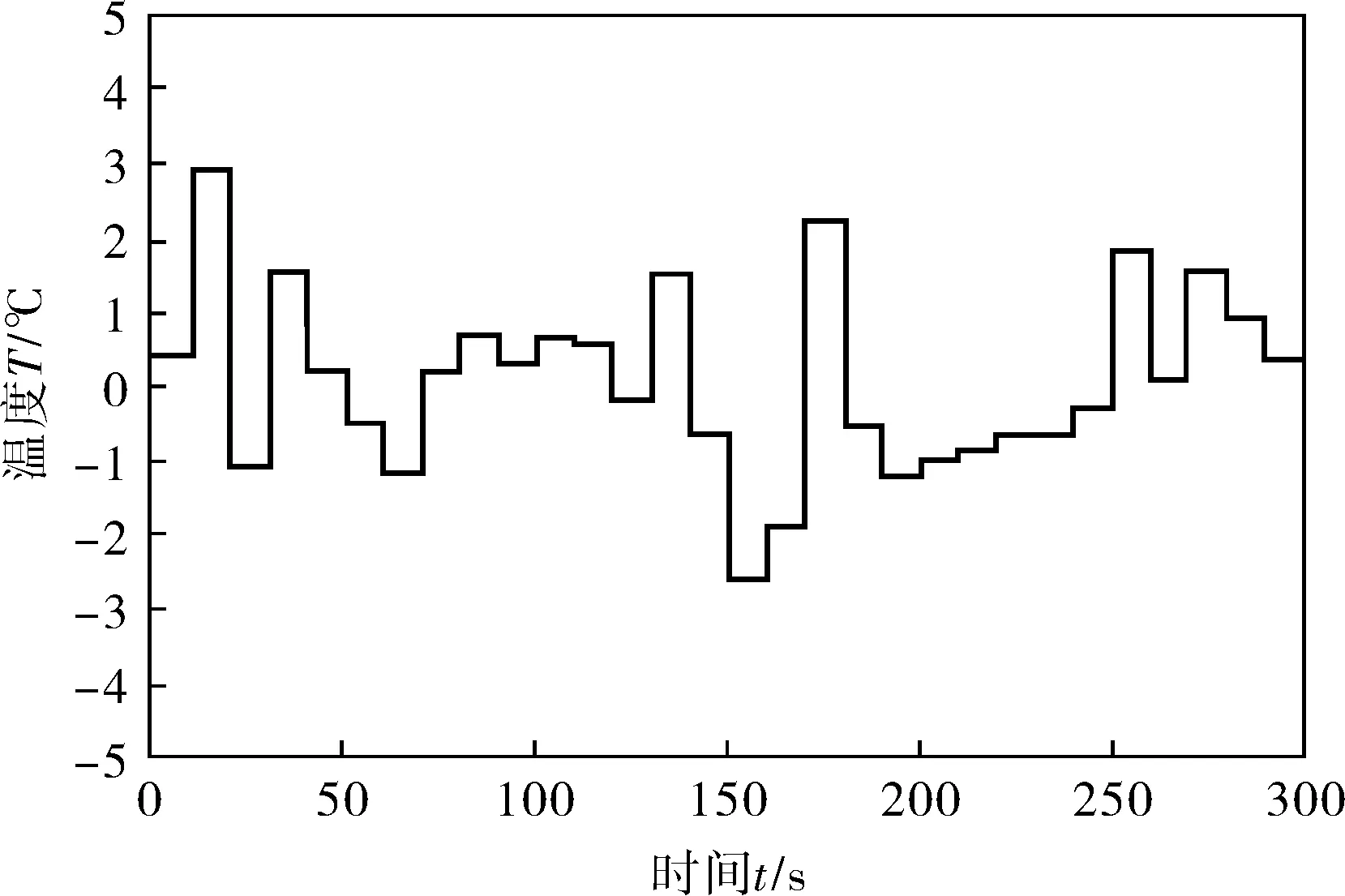
圖6 第2種較大振蕩擾動
在這兩種擾動下兩種控制器的輸出信號如圖7、8所示。
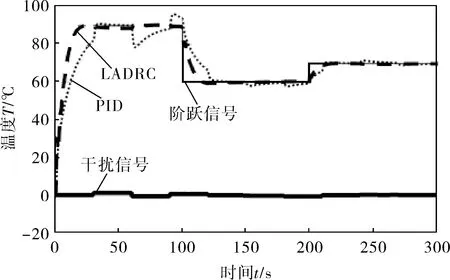
圖7 第1種擾動下的控制輸出
分析圖7可知,當試驗在變性階段出現干擾信號時,PID控制器的信號輸出有±5℃的波動,可能在實際試驗中達不到變性所需溫度導致PCR失敗,同時也有可能超調使得Taq DNA聚合酶失活。而LADRC控制下的輸出信號并未受到干擾影響。分析圖8同樣可以看出,每個階段的干擾信號都會影響PID控制的系統輸出,在退火和延伸階段,干擾信號使輸出信號出現大范圍波動,波動導致溫度不在反應的變化范圍內,不利于引物和模板的結合。而LADRC對各階段的干擾信號都能做出及時的補償措施,變動范圍在規定之內,滿足試驗進行的條件與檢測標準。
可見,LADRC控制器的抗擾能力比PID控制強,對于試驗過程出現不確定時間大小的干擾信號都能保證系統輸出穩定,使得各階段的溫度變換都在規定范圍內進行,保證試驗結果檢測的可靠準確性。而且,LADRC控制器比PID控制器可以更快地達到所需溫度而沒有超調。
綜合以上仿真試驗可知,LADRC控制器不僅可以解決超調性與快速性的矛盾,更重要的是可以增強對內外擾動的控制,提高了系統的自抗擾性能。
4 結束語
針對PCR儀設計的線性自抗擾控制器,解決了PCR試驗中遇到的各種內外擾動問題。由仿真試驗結果可知,LADRC控制器較PID控制器能更好地采取應對內外擾動的措施,并且可以縮短響應時間、超調減小且性能良好。因此,將該算法應用于PCR溫度控制中,可以保證試驗結果的準確性,提高試驗質量,具有一定的工程實用價值。
[1] 陳居得,楊明.PCR擴增基因檢測中的溫度控制[J].儀器儀表用戶,2004,11(1):59~61.
[2] 陳實,張衛平,陳文元,等.PCR溫度控制技術的研究進展[J].測控技術,2007,26(11):20~22.
[3] 韓京清.線性系統的結構與反饋系統計算[C].全國控制理論及其應用學術交流會論文集.北京:中國自動化學會自動控制理論委員會,1981:43~55.
[4] 韓京清.控制理論——模型論還是控制論[J].系統科學與數學,1989,(4):328~335.
[5] Zheng Q,Gao L Q,Gao Z Q.On Stability Analysis of Active Disturbance Rejection Control for Nonlinear Time-varying Plants with Unknown Dynamics[C].Proceedings of the IEEE Conference on Decision and Control.Piscataway,NJ:IEEE,2007:12~14.
[6] Tian G,Gao Z Q.Benchmark Tests of Active Disturbance Rejection Control on an Industrial Motion Control Platform[C].American Control Conference,ACC’09.Piscataway,NJ:IEEE,2009:5552~5557.
[7] Gao Z Q.Scaling and Bandwidth-parameterization Based Controller Tuning[C]. Proceedings of the IEEE American Control Conference.Piscataway,NJ:IEEE,2003:4989~4996.
[8] 許秀鋒,陸敏恂,周愛國,等.基于Smith預估器的PCR儀時滯溫控系統[J].同濟大學學報(自然科學版),2015,43(2):293~298.
[9] 譚小元,楊琴琴,王培成,等.基于Atmega128微控制器的芯片級PCR儀溫度控制系統[J].湖北民族學院學報(自然科學版),2011,29(4):406~409.
[10] 韓京清.自抗擾控制技術——估計補償不確定因素的控制技術[M].北京:國防工業出版社,2009.
[11] 吳超,王浩文,張玉文,等.基于LADRC的無人直升機軌跡跟蹤[J].航空學報,2015,36(2):473~483.
[12] 彭少康,王懷杰,劉玉縣.基于模糊PID控制算法的PCR儀溫度控制研究[J].儀表技術,2016,(3):34~37.
ApplicationofLinearAuto-disturbanceRejectionControllerinTemperatureControlSystemofPCRInstrument
SHAO Lei, HE Tao,LI Ji, LIU Hong-li, HAN Xue
(TianjinKeyLaboratoryforControlTheoryandApplicationsofComplicatedSystemsinSchoolofElectricalEngineering,TianjinUniversityofTechnology)
Considering the fact that when having PCR (polymerase chain reaction) applied to gene amplification detection, the external disturbance to the reaction temperature affects the test results, a linear auto-disturbance rejection controller was designed; through estimating various internal and external disturbances in the temperature transformation, the special linear feedback compensation was adopted to reduce disturbance in process.
auto-disturbance rejection controller, PCR instrument, disturbance, compensation
TH862+.6
A
1000-3932(2017)04-0357-05
2016-08-25,
2017-03-15)
天津市科委科技重大專項與工程(15ZXZNGX00140);天津市應用基礎與前沿技術研究計劃項目(16JCTPJC49400)。
邵磊(1973-),副教授,研究方向為物聯網監控系統、機器人視覺識別系統和激光多普勒動態測量系統。
聯系人:何濤(1991-),碩士研究生,研究方向為物聯網和自主機器人,624494473@qq.com。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32