馬鈴薯精密播種機(jī)智能控制系統(tǒng)設(shè)計(jì)
2017-11-01 23:07:28孫傳祝王法明李學(xué)強(qiáng)蘇國(guó)粱王相友魏忠彩孫景彬
農(nóng)業(yè)工程學(xué)報(bào) 2017年18期
孫傳祝,王法明,李學(xué)強(qiáng),蘇國(guó)粱,王相友,魏忠彩,孫景彬
?
馬鈴薯精密播種機(jī)智能控制系統(tǒng)設(shè)計(jì)
孫傳祝1,2,王法明1,2,李學(xué)強(qiáng)2,3※,蘇國(guó)粱2,3,王相友2,4,魏忠彩2,5,孫景彬2,4
(1. 山東理工大學(xué)機(jī)械工程學(xué)院,淄博 255091;2. 山東省馬鈴薯生產(chǎn)裝備智能化工程技術(shù)研究中心,德州 253600;3. 山東希成農(nóng)業(yè)機(jī)械科技有限公司,德州 253600;4. 山東理工大學(xué)農(nóng)業(yè)工程與食品科學(xué)學(xué)院,淄博 255091;5. 中國(guó)農(nóng)業(yè)大學(xué)工學(xué)院,北京 100083)
針對(duì)現(xiàn)有馬鈴薯播種機(jī)播種株距控制精準(zhǔn)度不高、易產(chǎn)生重種漏種等問(wèn)題,研發(fā)了一種由主控制模塊、檢測(cè)模塊、株距控制模塊和振動(dòng)強(qiáng)度控制模塊等7個(gè)模塊組成的馬鈴薯精密播種機(jī)智能控制系統(tǒng),采用液壓馬達(dá)控制薯種輸送帶運(yùn)轉(zhuǎn),步進(jìn)電機(jī)控制薯種輸送帶的振動(dòng)強(qiáng)度,實(shí)現(xiàn)了播種株距和重種漏種率的自動(dòng)控制。試驗(yàn)結(jié)果表明,播種速度相同時(shí),實(shí)際播種株距相對(duì)于設(shè)定播種株距的平均偏差依次增大,播種速度越高實(shí)際播種株距的穩(wěn)定性越差;薯種輸送帶振動(dòng)強(qiáng)度越強(qiáng),重種率越低,漏種率越高,各因素對(duì)重種漏種率影響的主次順序?yàn)椋菏矸N輸送帶振動(dòng)強(qiáng)度>播種速度>薯種質(zhì)量,且薯種輸送帶振動(dòng)強(qiáng)度對(duì)重種率、薯種輸送帶振動(dòng)強(qiáng)度和播種速度對(duì)漏種率有顯著影響;較佳的播種作業(yè)參數(shù)為:薯種輸送帶振動(dòng)強(qiáng)度為Ⅱ級(jí)(即輕微振動(dòng)時(shí))、播種速度為1.16 m/s及薯種質(zhì)量為35 g。經(jīng)2~3個(gè)周期即可調(diào)整到允許范圍內(nèi),且穩(wěn)定性好。因此,完全能夠滿足種植戶的實(shí)際播種作業(yè)要求,為智能控制馬鈴薯精密播種裝備的后續(xù)研發(fā)提供參考。
農(nóng)作物;設(shè)計(jì);振動(dòng);精密播種;智能控制;播種株距;重種率;漏種率
0 引 言
馬鈴薯糧菜兼用,營(yíng)養(yǎng)豐富,種植范圍廣泛[1-3]。2015年初,國(guó)家正式啟動(dòng)“馬鈴薯主糧化”戰(zhàn)略,到2020年國(guó)內(nèi)馬鈴薯種植面積將達(dá)到6.7×106hm2,且50%以上的馬鈴薯將會(huì)作為主糧消費(fèi)。但是,中國(guó)只是馬鈴薯生產(chǎn)大國(guó)而不是強(qiáng)國(guó),其機(jī)械化水平明顯滯后于小麥、玉米和水稻等主要糧食作物[4-6],無(wú)法滿足產(chǎn)業(yè)化需要。
目前,現(xiàn)有馬鈴薯播種機(jī)常用的排種裝置是碗勺式,但這種排種器易產(chǎn)生重種和漏種[7]。因此,呂金慶等[8]研制的舀勺式馬鈴薯排種器,當(dāng)主動(dòng)輪轉(zhuǎn)速為42 r/min,傾角為0°,清種強(qiáng)度為0.75 時(shí),排種合格指數(shù)為92.6%,重播指數(shù)為4.5%,漏播指數(shù)為2.9%;牛康等[9]設(shè)計(jì)的雙層種箱式排種裝置,空種率小于10%,重種率小于20%,與單層種箱式排種裝置相比,空種率降低50%,重種率降低24.5%;孫偉等[10]設(shè)計(jì)了由定位和測(cè)薯模塊組成的漏播檢測(cè)系統(tǒng)以及由固態(tài)繼電器和電磁鐵組成的速動(dòng)補(bǔ)薯裝置,可將漏種率控制在8%以下,補(bǔ)種成功率在85%以上;張錫志等[11]研制的與大型寬幅精密播種機(jī)相配套的智能監(jiān)測(cè)儀,采用模擬原理對(duì)傳感器信號(hào)進(jìn)行采集;龔麗農(nóng)等[12]設(shè)計(jì)了具有自動(dòng)補(bǔ)種功能的排種系統(tǒng),通過(guò)單片機(jī)控制電磁閥的動(dòng)作實(shí)現(xiàn)補(bǔ)種,能夠?qū)崿F(xiàn)精確補(bǔ)種。Buitenwerf等[13]根據(jù)馬鈴薯從薯種碗中的釋放時(shí)間建立了數(shù)學(xué)模型,臺(tái)架試驗(yàn)表明,馬鈴薯薯種形狀和薯種碗類型對(duì)播種精度影響很大;Leemans等[14]研制的控制系統(tǒng)不僅能對(duì)播種狀況進(jìn)行監(jiān)測(cè),還可引導(dǎo)播種作業(yè);Mcleod等[15]設(shè)計(jì)的試驗(yàn)裝置可將單粒薯種傳送到特定位置,且不僅可播種馬鈴薯,還可用于其他小種子作物的播種。另外,還有專家學(xué)者在馬鈴薯播種機(jī)結(jié)構(gòu)優(yōu)化等方面做了大量研究[16-28]。
綜上所述,目前關(guān)于馬鈴薯播種機(jī)方面的研究主要集中在提高播種精度和結(jié)構(gòu)優(yōu)化等方面,而對(duì)于馬鈴薯播種機(jī)智能控制方面的研究較少。本文研制了一種馬鈴薯精密播種機(jī)智能控制系統(tǒng),以期解決播種株距控制精準(zhǔn)度不高、易產(chǎn)生重種漏種等問(wèn)題,提高其播種精度和播種效率。
1 馬鈴薯精密播種機(jī)智能控制系統(tǒng)的設(shè)計(jì)
1.1 馬鈴薯精密播種機(jī)控制系統(tǒng)組成
智能控制馬鈴薯精密播種機(jī)是在2CMC-4型馬鈴薯播種機(jī)上增設(shè)控制裝置而成的,主要由機(jī)架、播種株距智能控制裝置、振動(dòng)強(qiáng)度智能控制裝置和輸送裝置等組成。其中播種株距智能控制裝置由液壓馬達(dá)、傳感器和主控制系統(tǒng)等組成(如圖1a所示),液壓馬達(dá)輸出軸與輸送裝置主動(dòng)軸連接,傳感器設(shè)置在主動(dòng)輥一端和地輪輪轂的內(nèi)端面上,以檢測(cè)液壓馬達(dá)轉(zhuǎn)速和通過(guò)地輪轉(zhuǎn)速間接檢測(cè)播種機(jī)的播種速度。
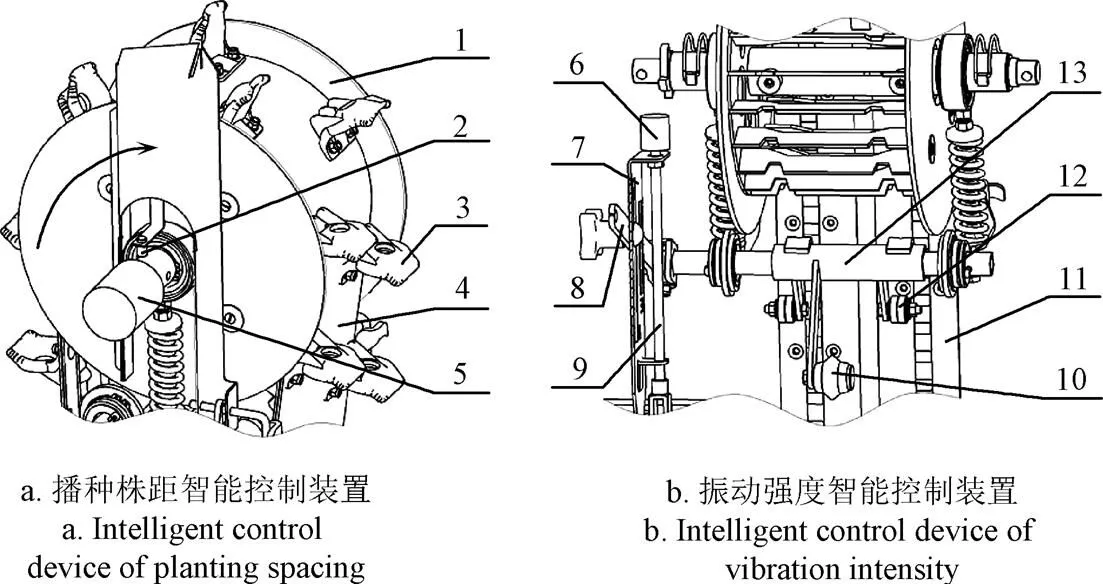
1.主動(dòng)輥 2.傳感器 3.薯種碗 4.輸送帶 5.液壓馬達(dá) 6.步進(jìn)電機(jī) 7.調(diào)整架 8.粗調(diào)手柄 9.微調(diào)螺桿 10.角輪 11.輸送帶 12.滾輪 13.回轉(zhuǎn)架
播種前,首先根據(jù)所播種的馬鈴薯品種和播種地區(qū)等不同設(shè)定播種株距。當(dāng)傳感器檢測(cè)到由于拖拉機(jī)的行駛速度變化等原因?qū)е碌剌嗈D(zhuǎn)速發(fā)生變化,系統(tǒng)由播種株距、液壓馬達(dá)轉(zhuǎn)速和地輪轉(zhuǎn)速轉(zhuǎn)換得到的播種速度3者之間的關(guān)系計(jì)算得播種株距超出設(shè)定播種株距的允許范圍時(shí),控制器便向液壓馬達(dá)發(fā)出指令改變轉(zhuǎn)速;當(dāng)檢測(cè)到的液壓馬達(dá)轉(zhuǎn)速信號(hào)經(jīng)計(jì)算得出的實(shí)際播種株距恢復(fù)到設(shè)定播種株距的允許范圍內(nèi)時(shí),再給液壓馬達(dá)發(fā)出指令維持這一轉(zhuǎn)速。其播種株距智能控制順序?yàn)椋涸O(shè)定播種株距→檢測(cè)地輪轉(zhuǎn)速→實(shí)際播種株距超出設(shè)定范圍→改變液壓馬達(dá)轉(zhuǎn)速→實(shí)際播種株距合格→維持液壓馬達(dá)轉(zhuǎn)速。
振動(dòng)強(qiáng)度的手動(dòng)調(diào)整裝置由調(diào)整架、粗調(diào)手柄和微調(diào)螺桿等組成[29-30](如圖1b所示),轉(zhuǎn)動(dòng)粗調(diào)手柄或微調(diào)螺桿均可改變薯種輸送帶的振動(dòng)強(qiáng)度,以達(dá)到調(diào)整重種漏種率之目的。振動(dòng)強(qiáng)度智能控制裝置是在手動(dòng)調(diào)整裝置的基礎(chǔ)上增設(shè)了步進(jìn)電機(jī)、傳感器和主控制系統(tǒng),其微調(diào)螺桿上端與步進(jìn)電機(jī)的輸出軸連接[31]。
當(dāng)傳感器檢測(cè)到薯種碗后,而未檢測(cè)到薯種、即漏種率超出設(shè)定范圍時(shí),主控制模塊便給步進(jìn)電機(jī)發(fā)出調(diào)整指令使其轉(zhuǎn)動(dòng)相應(yīng)角度;當(dāng)檢測(cè)到實(shí)際重種漏種率恢復(fù)到設(shè)定重種漏種率的允許范圍內(nèi)時(shí),再給步進(jìn)電機(jī)發(fā)出指令維持這一轉(zhuǎn)角。其振動(dòng)強(qiáng)度智能控制順序?yàn)椋簷z測(cè)到薯種碗→未檢測(cè)到薯種→漏種率超出設(shè)定范圍→步進(jìn)電機(jī)轉(zhuǎn)動(dòng)→重種漏種率合格→維持步進(jìn)電機(jī)轉(zhuǎn)角。
1.2 控制系統(tǒng)硬件設(shè)計(jì)
本控制系統(tǒng)的地輪和薯種輸送帶主動(dòng)輪的轉(zhuǎn)速檢測(cè)采用霍爾傳感器,霍爾傳感器通過(guò)單位時(shí)間內(nèi)感應(yīng)地輪或主動(dòng)輪的磁鋼發(fā)出的脈沖個(gè)數(shù)來(lái)檢測(cè)地輪或主動(dòng)輪轉(zhuǎn)速。由于PLC計(jì)算出的轉(zhuǎn)速信號(hào)為數(shù)字信號(hào),而控制系統(tǒng)采用的控制液壓馬達(dá)轉(zhuǎn)速的電液伺服放大器需要輸入模擬量信號(hào),因此采用EM235數(shù)模轉(zhuǎn)換后,再將指令發(fā)送給電液伺服放大器,進(jìn)而完成液壓馬達(dá)轉(zhuǎn)速控制。
薯種和薯種碗檢測(cè)采用光電傳感器,若檢測(cè)到有薯種或薯種碗則輸出高電平,反之為低電平。PLC在設(shè)定時(shí)間內(nèi)根據(jù)所采集的高、低電平個(gè)數(shù)計(jì)算出當(dāng)前漏種率,然后給步進(jìn)電機(jī)發(fā)出轉(zhuǎn)動(dòng)指令。
1.3 智能控制系統(tǒng)軟件優(yōu)化設(shè)計(jì)
控制系統(tǒng)總體結(jié)構(gòu)如圖2所示,主要由主控制模塊、檢測(cè)模塊、播種株距控制模塊、振動(dòng)強(qiáng)度控制模塊、人機(jī)交互模塊和故障報(bào)警模塊等組成。其中PLC主控制模塊的運(yùn)算速度快、工作穩(wěn)定性,液壓馬達(dá)轉(zhuǎn)速和播種速度檢測(cè)采用霍爾傳感器。

圖2 精密播種智能控制系統(tǒng)結(jié)構(gòu)示意圖
1.3.1播種株距控制模塊
液壓馬達(dá)轉(zhuǎn)速控制系統(tǒng)采用電液伺服閥控制液壓馬達(dá)轉(zhuǎn)速,由于具有實(shí)現(xiàn)電液轉(zhuǎn)換和功率放大功能,因此輸入的小功率電信號(hào)可被伺服閥轉(zhuǎn)換為大功率的液壓能輸出,實(shí)現(xiàn)執(zhí)行元件的位移、速度、加速度及力控制。PLC給電液伺服閥發(fā)出液壓馬達(dá)轉(zhuǎn)速控制指令后,電液伺服閥根據(jù)控制指令的控制開(kāi)口度,并連續(xù)或按比例地遠(yuǎn)程控制液壓油的輸出流量,使得液壓馬達(dá)根據(jù)輸出流量改變其轉(zhuǎn)速,實(shí)現(xiàn)轉(zhuǎn)速的智能控制。其控制方案如下:液壓馬達(dá)理論轉(zhuǎn)速n允許范圍為(n±0.1n),n<0.9n或者n>1.1n時(shí)差值為?n=n?n,則在下一周期將轉(zhuǎn)速指令修正為′=n+?n,其修正流程如圖3a所示。
播種株距控制系統(tǒng)根據(jù)液壓馬達(dá)轉(zhuǎn)速、播種機(jī)播種速度以及播種株距3者之間關(guān)系,通過(guò)設(shè)定的播種株距和檢測(cè)模塊采集的播種速度計(jì)算出液壓馬達(dá)理論轉(zhuǎn)速,其控制流程如圖3b所示。
主控制模塊將此轉(zhuǎn)速指令進(jìn)行處理并傳送至伺服放大器,控制電液伺服閥打開(kāi)相應(yīng)的開(kāi)口度,從而達(dá)到控制液壓馬達(dá)轉(zhuǎn)速之目的。若實(shí)際播種株距位于設(shè)定的播種株距范圍內(nèi),則播種機(jī)正常播種;當(dāng)超出設(shè)定播種株距的允許范圍時(shí),則發(fā)出修正指令和調(diào)整預(yù)警指令。
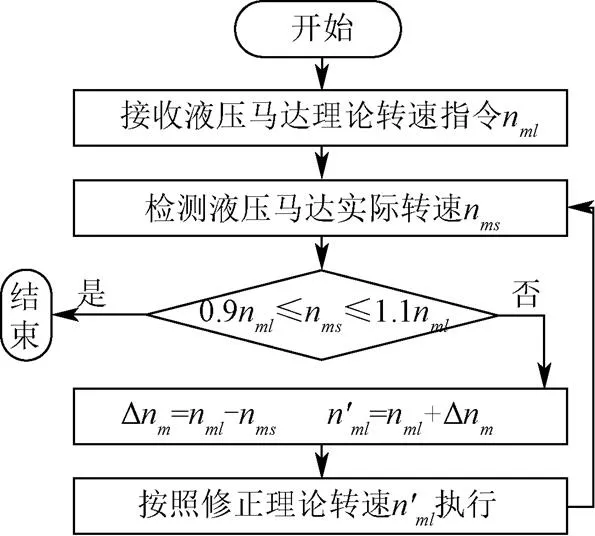
a. 液壓馬達(dá)轉(zhuǎn)速控制流程圖
a. Flow chart of speed control of hydraulic motor
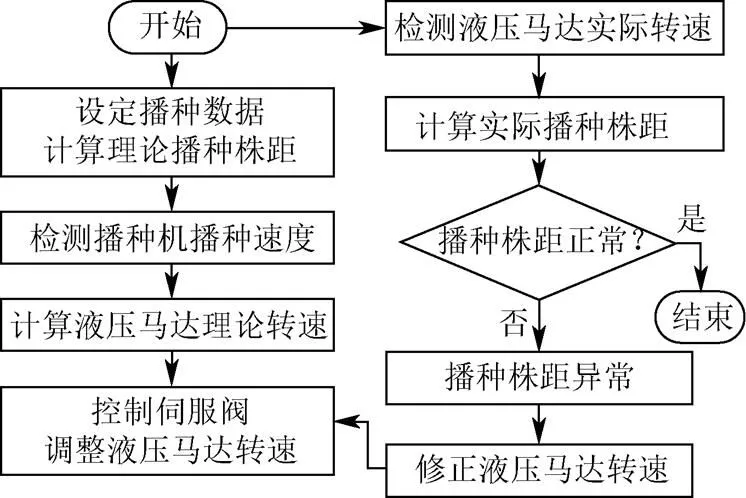
b. 播種株距智能控制流程圖
b. Flow chart of intelligent control of planting spacing
注:n為液壓馬達(dá)實(shí)際轉(zhuǎn)速,r?min-1,′為修正液壓馬達(dá)理論轉(zhuǎn)速,r?min-1。
Note:nwas actual speed of hydraulic motor, r?min-1,′was theoretical speed of hydraulic motor after correcting, r?min-1.
圖3控制流程圖
Fig.3 Control flow chart
1.3.2振動(dòng)強(qiáng)度控制模塊
播種機(jī)的重種漏種率取決于薯種輸送帶的振動(dòng)強(qiáng)度,其強(qiáng)度越大漏種率越高[30-31]、重種率越低,反之亦反。因此,試驗(yàn)時(shí)只需實(shí)時(shí)檢測(cè)漏種率即可。播種作業(yè)前,通過(guò)圖1b中的粗調(diào)手柄可大致調(diào)整好薯種輸送帶的振動(dòng)強(qiáng)度,即播種作業(yè)過(guò)程中不需做大幅調(diào)整,因此將步進(jìn)電機(jī)與微調(diào)螺桿連接(如圖1b所示),即步進(jìn)電機(jī)可直接驅(qū)動(dòng)微調(diào)螺桿來(lái)完成振動(dòng)強(qiáng)度的自動(dòng)調(diào)整。
當(dāng)實(shí)時(shí)漏種率超過(guò)允許上限值時(shí),應(yīng)減小振動(dòng)強(qiáng)度;反之,則應(yīng)增大振動(dòng)強(qiáng)度。調(diào)整信號(hào)經(jīng)步進(jìn)電機(jī)控制器的分配和放大后,傳送給步進(jìn)電機(jī)并驅(qū)動(dòng)其轉(zhuǎn)動(dòng)相應(yīng)角度,進(jìn)而帶動(dòng)微調(diào)螺桿轉(zhuǎn)動(dòng),完成振動(dòng)強(qiáng)度的自動(dòng)調(diào)整。其控制流程如圖4所示。
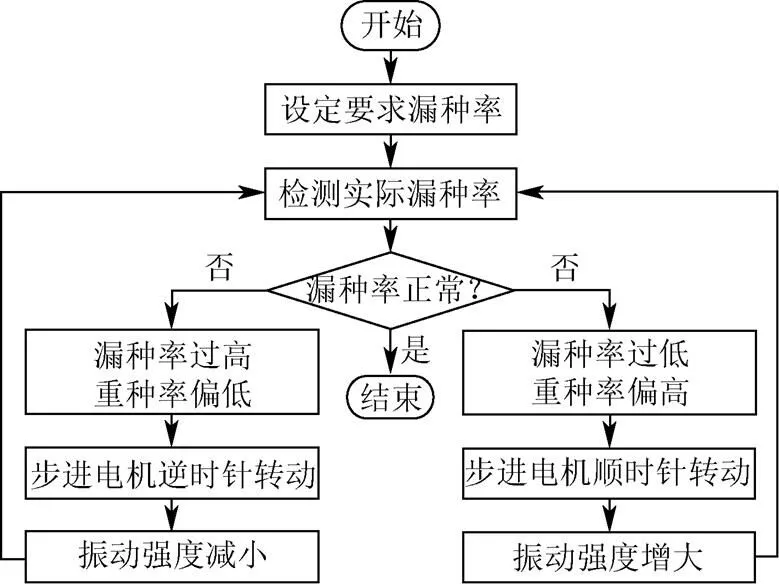
圖4 智能重種漏種控制流程圖
2 播種株距控制試驗(yàn)
2.1 試驗(yàn)材料及試驗(yàn)準(zhǔn)備
試驗(yàn)用馬鈴薯品種為荷蘭15號(hào)脫毒馬鈴薯,要求薯種無(wú)機(jī)械損傷、蟲鼠咬傷或嚴(yán)重畸形。試驗(yàn)前,將整薯切為塊狀,質(zhì)量為(40±10)g,并用滑石粉進(jìn)行防粘結(jié)處理。
為方便試驗(yàn),試驗(yàn)臺(tái)下方設(shè)有反方向運(yùn)行的水平輸送裝置,以模擬播種機(jī)的播種過(guò)程,其帶速為
v=v=πd·n×10-3/60 (1)
式中v為水平輸送帶帶速,m/s;v為播種速度,m/s;d為水平輸送滾筒直徑,mm;n為水平輸送滾筒轉(zhuǎn)速,r/min。由此得
L=v?l/v(2)
式中L為播種株距,mm;l為薯種輸送帶上的薯種碗間距,mm;v為薯種輸送帶帶速,m/s。
2.2 液壓馬達(dá)轉(zhuǎn)速控制試驗(yàn)
試驗(yàn)時(shí),由檢測(cè)模塊采集液壓馬達(dá)實(shí)際轉(zhuǎn)速n,其試驗(yàn)結(jié)果如表1所示。
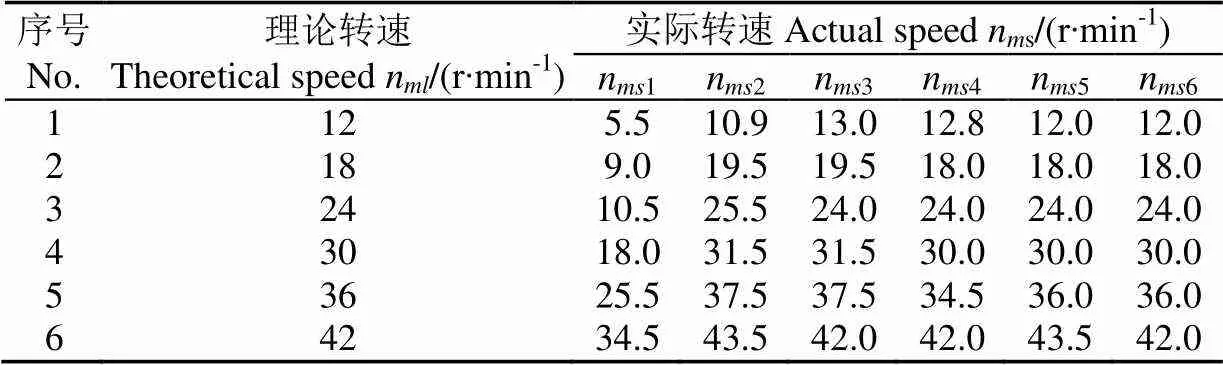
表1 液壓馬達(dá)轉(zhuǎn)速試驗(yàn)結(jié)果
注:n1~n6分別為1~6個(gè)檢測(cè)周期測(cè)得的液壓馬達(dá)實(shí)際轉(zhuǎn)速,r?min-1。
Note:n1-n6expressed actual speed of hydraulic motor collected in 1-6 cycle respectively, r?min-1.
由表1可見(jiàn),液壓馬達(dá)理論轉(zhuǎn)速n=12~42 r/min時(shí),實(shí)際轉(zhuǎn)速n與理論轉(zhuǎn)速n的最大偏差雖然達(dá)到56.3%,但經(jīng)1個(gè)檢測(cè)周期的調(diào)整,最大偏差即降為9.20%,平均偏差僅為6.09%,至第6周期時(shí)各次試驗(yàn)的偏差均降為0。因此,該控制方案切實(shí)可行,且穩(wěn)定性較高。
2.3 播種株距控制試驗(yàn)
2.3.1實(shí)際播種株距與設(shè)定播種株距比較試驗(yàn)
北方地區(qū)常用的播種株距L為150~300 mm,由此設(shè)定播種株距L=150、180、210、240、270和300 mm進(jìn)行試驗(yàn),其允許波動(dòng)范圍為ΔL=±0.1L,試驗(yàn)結(jié)果如表2所示。
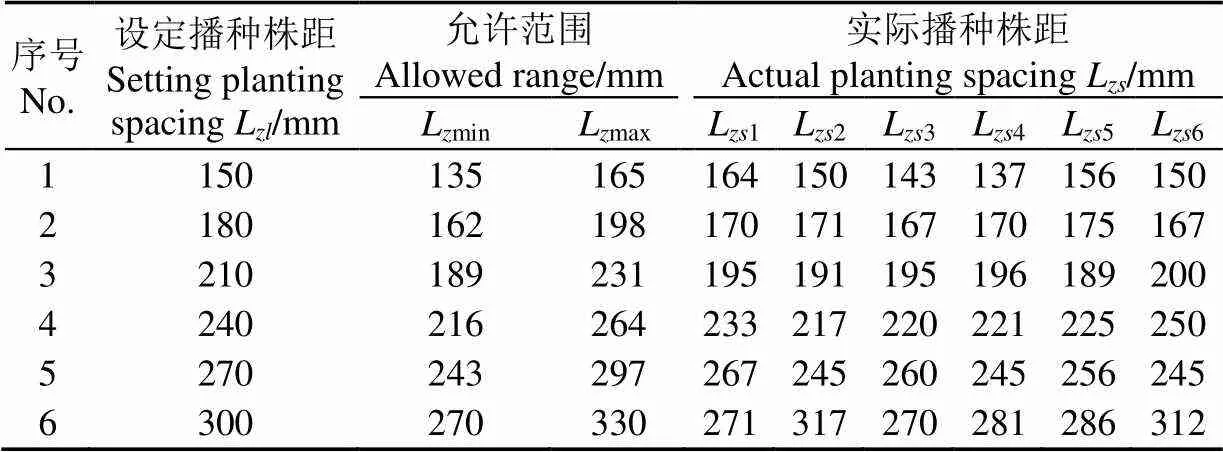
表2 實(shí)際、設(shè)定播種株距比較試驗(yàn)結(jié)果
注:播種速度v=1.74 m?s-1;L1~L6表示試驗(yàn)重復(fù)取樣6次,且每次取樣的連續(xù)播種長(zhǎng)度為2 m時(shí)測(cè)得的實(shí)際平均播種株距,mm。
Note: Planting speedvwas 1.74 m?s-1;L1-L6expressed actual average planting spacing measured from 6 times repeated sampling test, mm, and continuous planting length of each sampling was 2 m.
由表2看出,各實(shí)際播種株距均未超出允許波動(dòng)范圍。同一設(shè)定播種株距中,各實(shí)際播種株距與設(shè)定播種株距的最大平均偏差為7.46%,總平均偏差為6.17%。
2.3.2播種速度對(duì)播種株距的影響
北方種植戶一般選用拖拉機(jī)的A檔進(jìn)行播種作業(yè),其播種速度分別為0.88、1.16、1.43和1.74 m/s。為提高播種作業(yè)效率,本試驗(yàn)增加了速度為1.91 m/s的檔位。
為探討不同播種株距條件下較佳的播種速度,設(shè)定播種株距分別為150、180、210、240、270和300 mm,電液伺服閥增益為4進(jìn)行試驗(yàn)。試驗(yàn)測(cè)得的液壓馬達(dá)實(shí)際轉(zhuǎn)速和連續(xù)播種長(zhǎng)度為2 m時(shí)所測(cè)得的實(shí)際平均播種株距如表3所示。
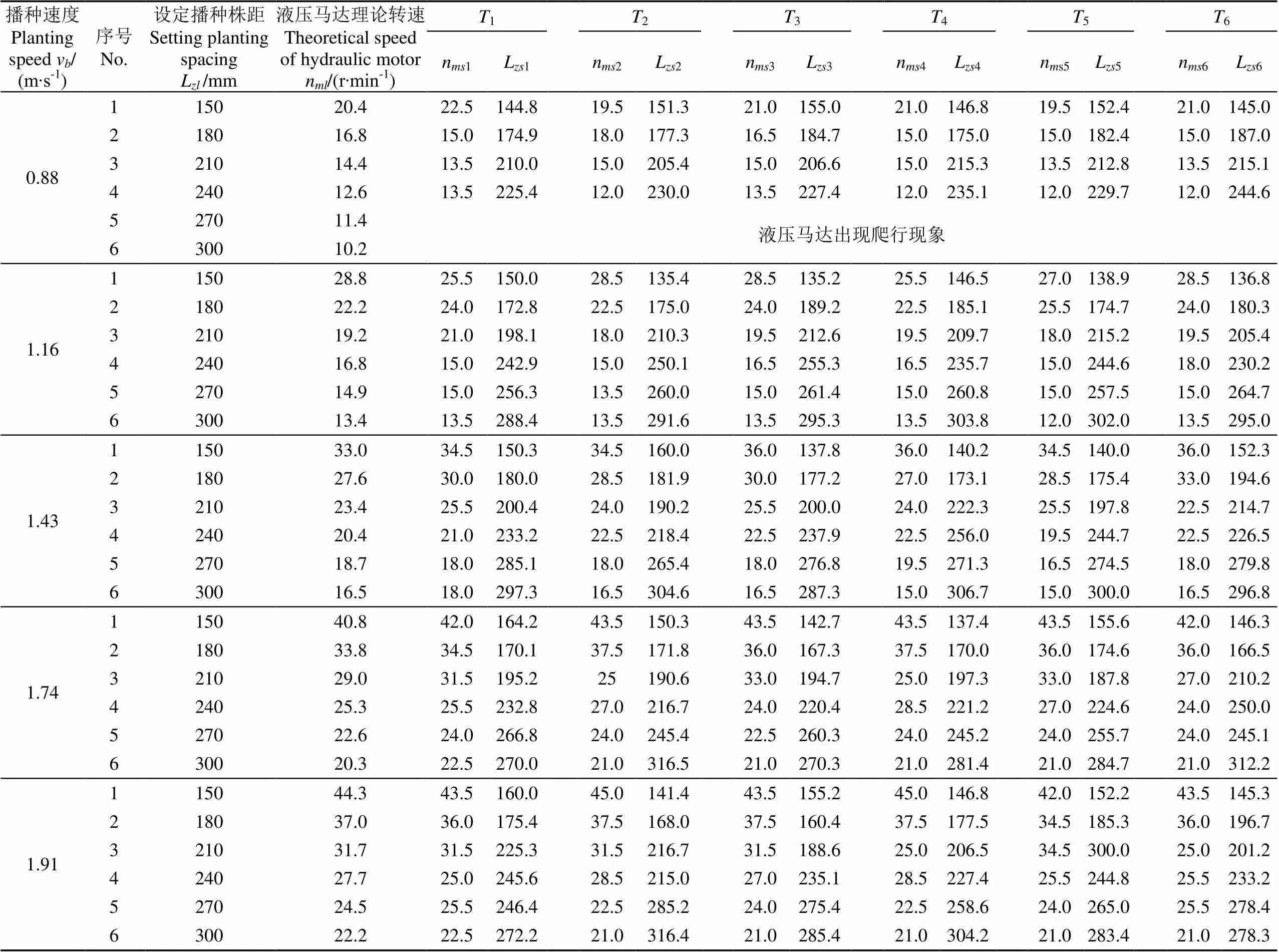
表3 不同播種速度對(duì)實(shí)際播種株距的影響
注:1~6分別表示每次取樣的測(cè)試結(jié)果。
Note:1-6show the test results for each sampling.
由表3可見(jiàn),當(dāng)播種速度為0.88 m/s、且設(shè)定播種株距L≥270 mm時(shí),由于液壓馬達(dá)理論轉(zhuǎn)速過(guò)低,導(dǎo)致其產(chǎn)生爬行現(xiàn)象,無(wú)法正常播種。除此之外,其他播種速度條件下播種時(shí)均能正常播種,且實(shí)際播種株距均可控制在允許范圍內(nèi)。
另外,在相同播種速度下播種不同的設(shè)定播種株距時(shí),實(shí)際播種株距均可控制在允許范圍內(nèi),各播種速度對(duì)應(yīng)的實(shí)際播種株距相對(duì)于設(shè)定播種株距的平均偏差分別為2.65%、3.37%、3.67%、5.75%和4.09%,可見(jiàn)其波動(dòng)幅度各不相同。為此,計(jì)算了實(shí)際播種株距的方差,其分布如表4所示。
由表4可知,當(dāng)播種速度由1.16提高到1.91 m/s時(shí),對(duì)應(yīng)于150~300 mm各播種株距的方差分別增大了1.75、3.12、4.18、1.50、3.28和7.06倍,即隨著播種速度的提高,其穩(wěn)定性越來(lái)越差。因此,在保證液壓馬達(dá)能夠正常工作的前提下,應(yīng)盡可能選用較低的播種速度。當(dāng)然,考慮到作業(yè)效率,播種速度不應(yīng)過(guò)低。

表4 不同播種速度下實(shí)際播種株距方差
3 重種漏種控制試驗(yàn)
由于通過(guò)調(diào)節(jié)薯種輸送帶的振動(dòng)強(qiáng)度和振動(dòng)頻率即可調(diào)節(jié)其重種率和漏種率,且漏種率越高,重種率越低,反之亦反。因此,主要檢測(cè)和控制漏種率,即可同時(shí)達(dá)到控制重種漏種率之目的。試驗(yàn)用薯種的準(zhǔn)備方法同2.1。
3.1 試驗(yàn)數(shù)據(jù)處理方法
重種、漏種率及漏種率檢測(cè)誤差公式如式(3)、(4)、(5)所示。
ξ=(Z/Z)×100% (3)
ξ=(Z/Z)×100% (4)
式中ξ為重種率,%;Z為重種播種株數(shù),株;Z為總播種株數(shù),株;ξ為漏種率,%;Z為漏種播種株數(shù),株;δ為漏種率檢測(cè)誤差,%;ξ為系統(tǒng)檢測(cè)漏種率,%;ξ為實(shí)際漏種率,%。
3.2 單因素試驗(yàn)及分析
3.2.1播種速度對(duì)重種漏種率的影響
取播種株距為210 mm,播種速度v即試驗(yàn)臺(tái)的水平輸送帶帶速v分別為0.88、1.16、1.43、1.74和1.91 m/s。由式(2)計(jì)算得水平輸送帶帶速在播種株距為210 mm時(shí)所對(duì)應(yīng)的薯種輸送帶帶速。播種100株薯種,測(cè)得的試驗(yàn)結(jié)果如表5所示。
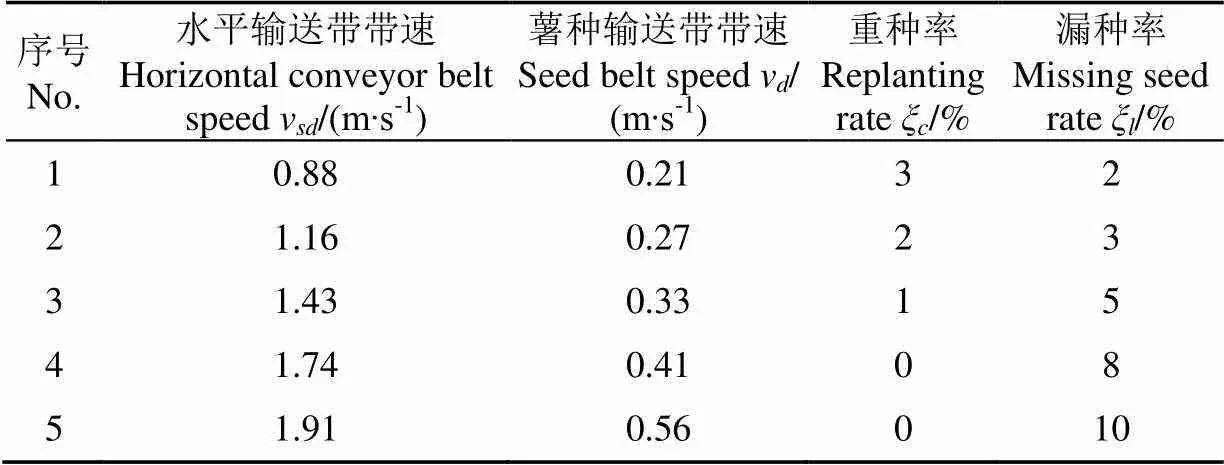
表5 播種速度對(duì)重種漏種率影響試驗(yàn)結(jié)果
注:播種株距為210 mm。
Note: Planting spacing is 210 mm.
由表5看出,當(dāng)播種株距等不變時(shí),播種速度、即水平輸送帶帶速越高,由于薯種輸送帶振動(dòng)頻率也越高,振落的薯種越多,使得漏種率越來(lái)越高,而重種率越來(lái)越低,直至趨于0。
3.2.2薯種輸送帶振動(dòng)強(qiáng)度對(duì)重種漏種率的影響
將薯種輸送帶振動(dòng)強(qiáng)度按照微弱振動(dòng)、輕微振動(dòng)、中等振動(dòng)、較強(qiáng)振動(dòng)和強(qiáng)烈振動(dòng)由弱到強(qiáng)依次分為Ⅰ~Ⅴ5個(gè)等級(jí),播種100株薯種,測(cè)得的試驗(yàn)結(jié)果如表6所示。由表6可知,當(dāng)播種株距等因素不變時(shí),薯種輸送帶振動(dòng)強(qiáng)度越強(qiáng),振動(dòng)幅度越大,則漏種率越高,重種率越低。
3.3 正交試驗(yàn)及分析
3.3.1試驗(yàn)設(shè)計(jì)
在上述單因素試驗(yàn)基礎(chǔ)上,將播種速度、薯種輸送帶振動(dòng)強(qiáng)度和薯種質(zhì)量這3個(gè)因素分別設(shè)置5個(gè)水平,進(jìn)行三因素五水平正交試驗(yàn)。在進(jìn)行正交試驗(yàn)及分析時(shí),采用1、2、3分別表示播種速度、薯種輸送帶振動(dòng)強(qiáng)度和薯種質(zhì)量這3個(gè)因素,1,2,3分別為3個(gè)因素對(duì)應(yīng)的編碼值,其試驗(yàn)方案如表7所示。
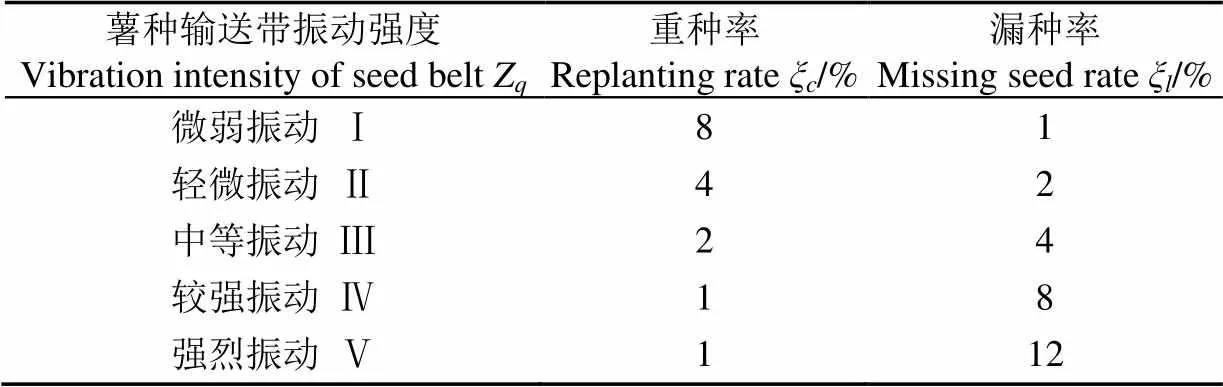
表6 不同薯種輸送帶振動(dòng)強(qiáng)度對(duì)重種漏種率的影響
注:播種株距為210 mm。
Note: Planting spacing is 210 mm.
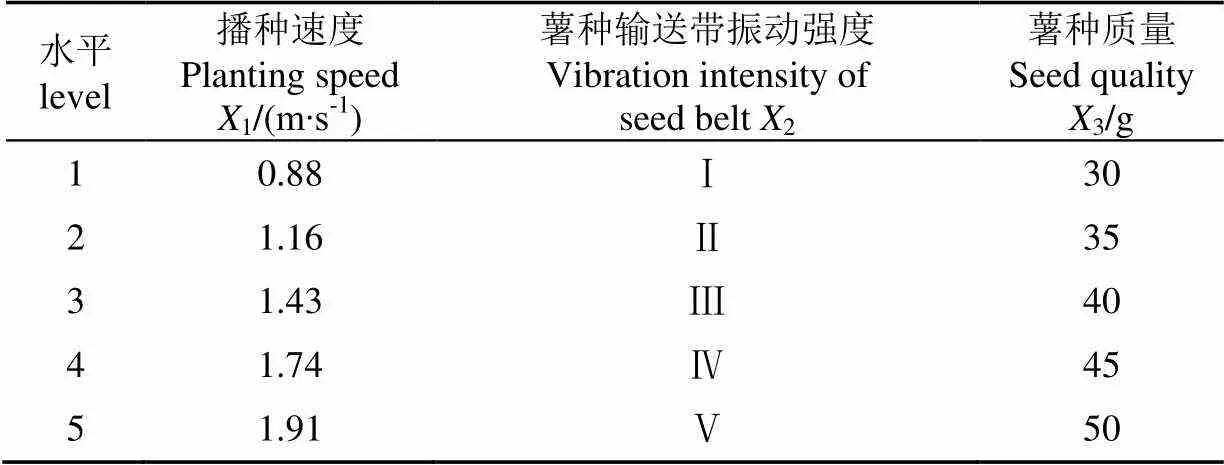
表7 影響因素及水平表
3.3.2極差分析
除設(shè)定的3個(gè)因素外,其他因素保持不變,播種100株薯種,其正交試驗(yàn)結(jié)果如表8所示。
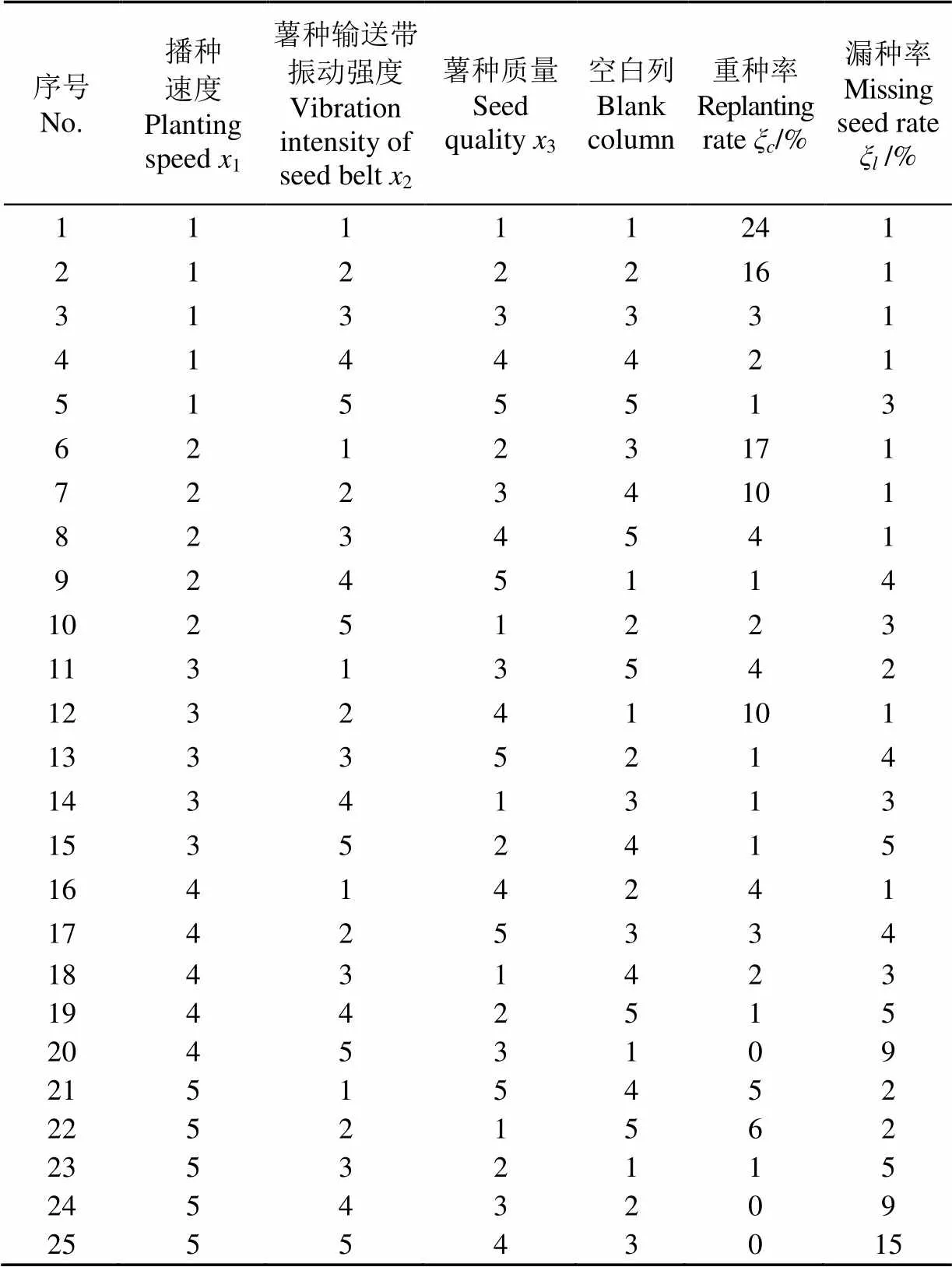
表8 各因素對(duì)重種漏種率影響正交試驗(yàn)記錄表
續(xù)表

序號(hào)No.播種速度Planting speed x1薯種輸送帶振動(dòng)強(qiáng)度Vibration intensity of seed belt x2薯種質(zhì)量Seedquality x3空白列Blank column重種率Replanting rate ξc/%漏種率Missing seed rate ξl /% 重種率Replanting rateK1c46.054.035.036.0 K2c34.045.036.023.0 K3c17.011.017.024.0 K4c10.05.020.020.0 K5c12.04.011.016.0 極差Rc7.210.05.04.0 因素主次x2>x1>x3>x4 漏種率Missing seed rateK1l7.07.012.020.0 K2l10.09.017.018.0 K3l15.014.022.024.0 K4l22.022.019.012.0 K5l33.035.017.013.0 極差Rl4.25.61.02.2 因素主次x2>x1>x4>x3
由表8可見(jiàn),各因素水平對(duì)重種率影響的主次順序?yàn)?>1>3。若要求降低重種率,則應(yīng)選擇各因素1c、2c和3c的最小值作為最優(yōu)水平得較佳的播種作業(yè)參數(shù)為:薯種輸送帶振動(dòng)強(qiáng)度為Ⅴ級(jí)、播種速度為1.74 m/s及薯種質(zhì)量為50 g。同理,各因素水平對(duì)漏種率影響的主次為2>1>3。最優(yōu)水平為薯種輸送帶振動(dòng)強(qiáng)度2為Ⅰ級(jí)、播種速度為0.88 m/s及薯種質(zhì)量為30 g。
由于重種率與漏種率兩者存在著一定聯(lián)系,重種率越高,則漏種率越低,反之亦反。因此,通過(guò)控制漏種率來(lái)控制重種率是可行的。
綜上所述,按照“盡可能保證較低的漏種率,并可適當(dāng)放寬重種率”原則,結(jié)合生產(chǎn)實(shí)際,認(rèn)為較佳的播種作業(yè)參數(shù)為薯種輸送帶振動(dòng)強(qiáng)度為Ⅱ級(jí)、播種速度為1.16 m/s及薯種質(zhì)量為35 g。
3.3.3方差分析
為方便分析,將計(jì)算的離差平方和、自由度以及平均總離差平方和等數(shù)據(jù)列入重種率和漏種率方差分析表,如表9所示。由表9可知,MS1、MS2和MS3均大于MS,故可直接利用MS計(jì)算F1、F2和F3。由于F2值最大、且大于由分布表[32]查得的0.05(4, 4)臨界值6.39,故因素2(薯種輸送帶振動(dòng)強(qiáng)度)對(duì)重種率有顯著影響,且各因素對(duì)試驗(yàn)結(jié)果影響的主次順序依次為2>1>3。
由表9可知,MS1和MS2大于MS,但MS3小于MS,故將MS3歸入誤差項(xiàng),構(gòu)成新的誤差項(xiàng)Δ,重新計(jì)算誤差項(xiàng)Δ的SSΔ、dfΔ和MSΔ值,并且利用MSΔ值計(jì)算F1和F2。由于F2和F1均大于查得的0.05(4,8)臨界值3.84[32],故因素2和因素1對(duì)漏種率均有顯著影響,且主次順序依次為2>1>3,與極差分析結(jié)果一致。
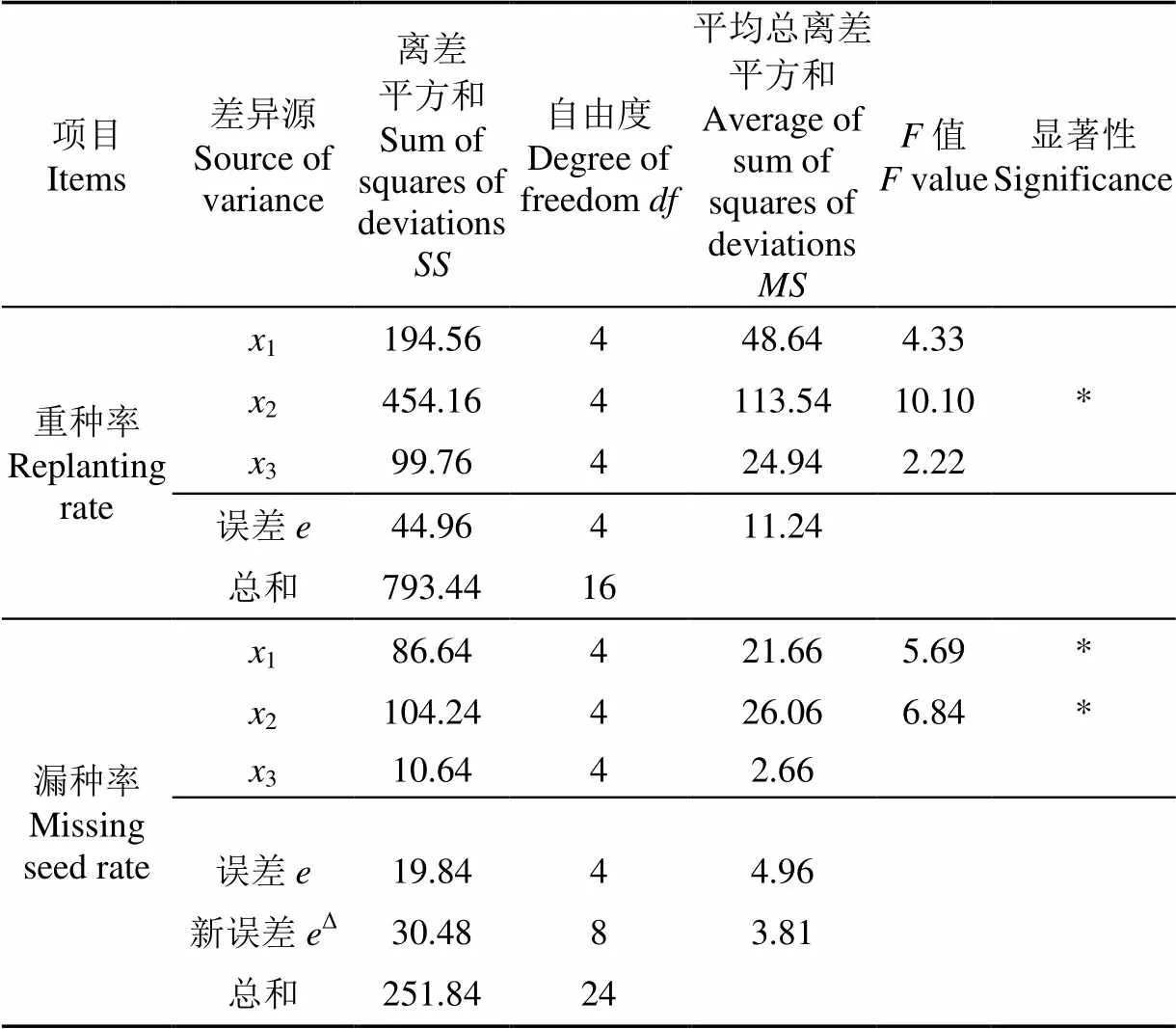
表9 重種率與漏種率方差分析
注:* 當(dāng)大于臨界值時(shí)認(rèn)為影響顯著。新誤差e是將MS3歸入誤差項(xiàng)[32]。
Note: When theis larger than the critical value, the effect is significant.MS3is lumped error term in new errore[32].
3.4 漏種檢測(cè)準(zhǔn)確性和穩(wěn)定性試驗(yàn)
3.4.1檢測(cè)準(zhǔn)確性試驗(yàn)
為驗(yàn)證漏種檢測(cè)模塊采集漏種信息的準(zhǔn)確性,按上述試驗(yàn)得出的較佳播種作業(yè)參數(shù)“薯種輸送帶振動(dòng)強(qiáng)度為Ⅱ級(jí)、播種速度為1.16 m/s和薯種質(zhì)量為35 g”進(jìn)行了漏種檢測(cè)準(zhǔn)確性試驗(yàn)。在各參數(shù)保持不變的前提下重復(fù)試驗(yàn)10次,得到的漏種檢測(cè)模塊所采集的漏種率、實(shí)際漏種率及檢測(cè)誤差如表10所示。

表10 漏種檢測(cè)準(zhǔn)確性試驗(yàn)結(jié)果
由表10計(jì)算得,漏種檢測(cè)模塊所采集的平均漏種率為2.31%,實(shí)際平均漏種率為2.22%,雖有一定偏差,但其平均檢測(cè)誤差為5.25%,最大檢測(cè)誤差為6.58%,即檢測(cè)準(zhǔn)確率≥93%。因此,完全可以滿足種植戶的實(shí)際播種作業(yè)要求。
3.4.2檢測(cè)穩(wěn)定性試驗(yàn)
設(shè)置不同的允許漏種率范圍,即每次試驗(yàn)時(shí)允許的漏種率最大、最小變化界限。將現(xiàn)場(chǎng)測(cè)得的實(shí)際漏種率ξ與允許漏種率范圍做比較,并記錄實(shí)際重種率ξ和漏種率ξ的變化。試驗(yàn)結(jié)果如表11所示。

表11 重種漏種控制穩(wěn)定性試驗(yàn)結(jié)果
注:試驗(yàn)播種株數(shù)為200株,ξ1~ξ10和ξ1~ξ10分別表示1~10個(gè)檢測(cè)周期所測(cè)得的實(shí)際漏種率和重種率,%。
Note: Planting amount was 200,ξ1-ξ10andξ1-ξ10expressed actual missing and replanting rate collected in 1-10 cycle respectively, %.
由表11可見(jiàn),當(dāng)實(shí)際漏種率超出允許范圍時(shí),經(jīng)2~3個(gè)檢測(cè)周期即可調(diào)整到允許范圍內(nèi),調(diào)整后雖有波動(dòng),但始終不超出允許范圍。另外,當(dāng)實(shí)際漏種率發(fā)生變化時(shí),實(shí)際重種率也會(huì)隨之做反方向變化。因此,采用控制漏種率來(lái)同時(shí)控制重種率和漏種率的方法可以滿足實(shí)際播種要求。
4 結(jié) 論
本系統(tǒng)采用液壓馬達(dá)控制薯種輸送帶運(yùn)轉(zhuǎn),步進(jìn)電機(jī)控制薯種輸送帶的振動(dòng)強(qiáng)度,便于實(shí)現(xiàn)播種株距和重種漏種率的自動(dòng)控制。試驗(yàn)結(jié)果表明:
1)當(dāng)液壓馬達(dá)理論轉(zhuǎn)速在12~42 r/min范圍內(nèi)時(shí),經(jīng)1個(gè)檢測(cè)周期最大偏差即降為9.20%,平均偏差僅為6.09%;播種速度相同時(shí),各播種速度對(duì)應(yīng)的實(shí)際播種株距相對(duì)于設(shè)定播種株距的平均偏差分別為2.65%、3.37%、3.67%、5.75%和4.09%,當(dāng)播種速度由1.16提高到1.91 m/s時(shí),各播種株距的方差分別增大了1.75、3.12、4.18、1.50、3.28和7.06倍,即隨著播種速度的提高其穩(wěn)定性越來(lái)越差,因此應(yīng)盡可能選用較低的播種速度。
2)薯種輸送帶振動(dòng)強(qiáng)度越強(qiáng),則重種率越低,而漏種率越高,反之亦反;各因素對(duì)重種率和漏種率影響的主次順序?yàn)椋菏矸N輸送帶振動(dòng)強(qiáng)度>播種速度>薯種質(zhì)量,較佳的播種作業(yè)參數(shù)為薯種輸送帶振動(dòng)強(qiáng)度為Ⅱ級(jí)(即輕微振動(dòng)時(shí))、播種速度為1.16 m/s、薯種質(zhì)量為35 g。
3)漏種檢測(cè)模塊所采集的平均漏種率為2.31%,實(shí)際平均漏種率為2.22%,平均檢測(cè)誤差為5.25%,最大檢測(cè)誤差為6.58%,即檢測(cè)準(zhǔn)確率≥93%;當(dāng)實(shí)際漏種率超出允許范圍時(shí),經(jīng)2~3個(gè)檢測(cè)周期即可調(diào)整到允許范圍內(nèi),且穩(wěn)定性好。
本文為馬鈴薯播種機(jī)常見(jiàn)的播種株距精準(zhǔn)度不高、易產(chǎn)生重種漏種等問(wèn)題提供了解決辦法,可為馬鈴薯播種機(jī)智能控制系統(tǒng)的后續(xù)研究提供參考。
[1] 楊炳南,張小燕,趙鳳敏,等. 不同馬鈴薯品種的不同加工產(chǎn)品適宜性評(píng)價(jià)[J]. 農(nóng)業(yè)工程學(xué)報(bào),2015,31(20):301-308.
Yang Bingnan, Zhang Xiaoyan, Zhao Fengmin, et al. Suitability evaluation of different potato cultivars for processing products[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31(20): 301-308. (in Chinese with English abstract)
[2] Kang Wenqin, Fan Mingshou, Ma Zhong, et al. Luxury absorption of potassium by potato plants[J]. American Journal of Potato Research, 2014, 91(5): 573-578.
[3] Nobuhisa K, Tsutomu K, Keiichi S, et al. Energy efficiency of potato production practices for bioethanol feedstock in northern Japan[J]. European Journal of Agronomy, 2013, 44(1): 1-8.
[4] 史明明,魏宏安,劉星,等. 國(guó)內(nèi)外馬鈴薯收獲機(jī)械發(fā)展現(xiàn)狀[J]. 農(nóng)機(jī)化研究,2013,35(10):213-217.
Shi Mingming, Wei Hongan, Liu Xing, et al. The Present situation of potato harvester development at home and abroad[J]. Journal of Agricultural Mechanization Research, 2013, 35(10): 213-217. (in Chinese with English abstract)
[5] 施智浩,胡良龍,吳努,等. 馬鈴薯和甘薯種植及其收獲[J]. 農(nóng)機(jī)化研究,2015,37(4):265-268.
Shi Zhihao, Hu Lianglong, Wu Nu, et al. Potato and sweet potato planting and its harvest machinery[J]. Journal of Agricultural Mechanization Research, 2015, 37(4): 265-268. (in Chinese with English abstract)
[6] 陳志水,張燕,梁棟,等. 振動(dòng)篩式馬鈴薯收獲機(jī)的設(shè)計(jì)[J]. 農(nóng)機(jī)化研究,2012,34(4):84-87.
Chen Zhishui, Zhang Yan, Liang Dong, et al. Design of potato harvester in shaker-style[J]. Journal of Agricultural Mechanization Research, 2012, 34(4): 84-87. (in Chinese with English abstract)
[7] 曹東. 馬鈴薯精密播種機(jī)漏播監(jiān)測(cè)預(yù)警系統(tǒng)的研究[D]. 楊凌:西北農(nóng)林科技大學(xué),2013.
Cao Dong. Study on the Monitoring and Warning System for the Seeding of Potato Precision Seeder[D]. Yangling: Northwest Agriculture and Forestry University, 2013. (in Chinese with English abstract)
[8] 呂金慶,楊穎,李紫輝,等. 舀勺式馬鈴薯播種機(jī)排種器的設(shè)計(jì)與試驗(yàn)[J]. 農(nóng)業(yè)工程學(xué)報(bào),2016,32(16):17-25.
Lü Jinqing, Yang Ying, Li Zihui, et al. Design and experiment of cup-belt type potato seed-metering device[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2016, 32(16): 17-25. (in Chinese with English abstract)
[9] 牛康,苑嚴(yán)偉,羅敏,等. 雙層種箱式馬鈴薯排種裝置設(shè)計(jì)與試驗(yàn)[J]. 農(nóng)業(yè)工程學(xué)報(bào),2016,32(20):32-39.
Niu Kang, Yuan Yanwei, Luo Min, et al. Design and experiment of potato metering device with double-deck seed tank[J]. Transactions of the Chinese Society of Agricultural Engineering(Transactions of the CSAE), 2016, 32(20): 32-39. (in Chinese with English abstract)
[10] 孫偉,王關(guān)平,吳建民. 勺鏈?zhǔn)今R鈴薯排種器漏播檢測(cè)與補(bǔ)種系統(tǒng)的設(shè)計(jì)與試驗(yàn)[J]. 農(nóng)業(yè)工程學(xué)報(bào),2016,32(11):8-15.
Sun Wei, Wang Guanping, Wu Jianmin. Design and experiment on loss sowing testing and compensation system of spoon-chain potato metering device[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2016, 32(11): 8-15. (in Chinese with English abstract)
[11] 張錫智,李敏,孟臣. 精密播種智能監(jiān)視儀的研制[J]. 農(nóng)業(yè)工程學(xué)報(bào),2004,20(2):136-139.
Zhang Xizhi, Li Min, Meng Chen. Research and development of precision seeding intelligent monitor[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2004, 20(2): 136-139. (in Chinese with English abstract)
[12] 龔麗農(nóng),戴玉華,蔣金琳. 具有自動(dòng)補(bǔ)種功能的機(jī)械式精密排種系統(tǒng)[J]. 農(nóng)業(yè)機(jī)械學(xué)報(bào),2008,39(7):60-63.
Gong Linong, Dai Yuhua, Jiang Jinlin. Experimental investigation of a new mechanical precision metering device with automatic compensative seeding[J]. Transactions of the Chinese Society for Agricultural Machinery, 2008, 39(7): 60-63. (in Chinese with English abstract)
[13] Buitenwerf H, Hoogmoed W B, Lerink P. Assessment of the behaviour of potatoes in a cup-belt planter[J]. Biosys Tems Engineering, 2006, 95(1): 35-41.
[14] Leemans V, Destain M F. A computer-vision based precision seed drill guidance assistance[J]. Computers and Electronics in Agriculture, 2007, 59(1/2): 1-12.
[15] Mcleod C D, Misener G C, Tai G C C. A precision seeding device for true potato seed[J]. American Potato Journal, 1992, 69(4): 255-264.
[16] 韓恒,陳偉,杜文亮,等. 影響帶勺式馬鈴薯播種機(jī)排種性能的因素分析與試驗(yàn)[J]. 農(nóng)機(jī)化研究,2016,38(3):209-212,217.
Han Heng, Chen Wei, Du Wenliang, et al. Analysis and test of the factors influence the seeding performance of potato planters[J]. Journal of Agricultural Mechanization Research, 2016, 38(3): 209-212, 217. (in Chinese with English abstract)
[17] 政東紅,陳偉,杜文亮,等. 勺式排種技術(shù)及其排種均勻性的研究分析[J]. 農(nóng)機(jī)化研究,2016,38(7):106-109.
Zheng Donghong, Chen Wei, Du Wenliang, et al. The study and analysis of cup seed sowing technology and uniformity[J]. Journal of Agricultural Mechanization Research, 2016, 38(7): 106-109. (in Chinese with English abstract)
[18] 唐海軍,呂釗欽,劉樹(shù)峰. 新型馬鈴薯播種機(jī)的設(shè)計(jì)[J]. 農(nóng)機(jī)化研究,2015,37(4):148-151.
Tang Haijun, Lü Zhaoqin, Liu Shufeng. The design of new potato planter[J]. Journal of Agricultural Mechanization Research, 2015, 37(4): 148-151. (in Chinese with English abstract)
[19] 李鵬鵬,楚雪平. 基于我國(guó)北方地區(qū)農(nóng)藝要求的馬鈴薯播種機(jī)設(shè)計(jì)[J]. 江蘇農(nóng)業(yè)科學(xué),2014,42(5):350-352.
[20] Liu Quanwei, Wu Jianmin, Wang Di, et al. Current status and process of the potato seeder[J]. Journal of Agricultural Mechanization Research, 2013, 35(6): 238-241.
[21] 趙潤(rùn)良. 2BMF-1馬鈴薯播種機(jī)的研制[J]. 農(nóng)機(jī)化研究,2012,34(10):100-102,106.
Zhao Runliang. Development of 2BMF-1 potato seeder[J]. Journal of Agricultural Mechanization Research, 2012, 34(10): 100-102, 106. (in Chinese with English abstract)
[22] 張曉東,吳建民,孫偉,等. 馬鈴薯播種器自動(dòng)補(bǔ)償系統(tǒng)的設(shè)計(jì)[J]. 甘肅農(nóng)業(yè)大學(xué)學(xué)報(bào),2013,48(1):145-149.
Zhang Xiaodong, Wu Jianmin, Sun Wei, et al. Design of automatic compensation system for potato planter[J]. Journal of Gansu Agricultural University, 2013, 48(1): 145-149. (in Chinese with English abstract)
[23] Tarkalson D D, King B A, Bjorneberg D L, et al. Evaluation of in-row plant spacing and planting configuration for three irrigated potato cultivars[J]. American Journal of Potato Research, 2011, 88(3): 207-217.
[24] Mohammed T A. Bio-preparates support the productivity of potato plants grown under desert farming conditions of north Sinai: Five years of field trials[J]. Journal of Advanced Research, 2014, 5(1): 41-48.
[25] Pavek M J, Thornton R E. Planting depth influences potato plant morphology and economic value[J]. American Journal of Potato Research, 2009, 86(1): 56-67.
[26] Haase W C. Pioneer i-a planter computer system[J]. ASAE, 1986(1): 135-145.
[27] Timothy P M, John P F, Matthew J D. Evaluation of a system to spatially monitor hand planting of pine seedlings[J]. Computers and Electronics in Agriculture, 2009, 64(2): 173-182.
[28] 劉新衛(wèi),陳百明. 黃土丘陵區(qū)安塞縣縣域糧食生產(chǎn)潛力及其開(kāi)發(fā)[J]. 農(nóng)業(yè)工程學(xué)報(bào),2004,20(6):286-290.
Liu Xinwei, Chen Baiming. Potential grain productivity and its exploitation of a county in Loess hilly-gully region[J]. Transactions of the Chinese Society of Agricultural Engineering(Transactions of the CSAE), 2004, 20(6): 286-290. (in Chinese with English abstract)
[29] 李學(xué)強(qiáng),孫傳祝,盧延芳,等. 參數(shù)可調(diào)式馬鈴薯播種機(jī)設(shè)計(jì)[J]. 湖北農(nóng)業(yè)科學(xué),2015,54(20):5140-5144.
Li Xueqiang, Sun Chuanzhu, Lu Yanfang, et al. Design on the adjustable parameters potato planter[J]. Hubei Agricultural Sciences, 2015, 54(20): 5140-5144. (in Chinese with English abstract)
[30] 盧延芳,孫傳祝,王法明,等. 馬鈴薯播種機(jī)播種單元改進(jìn)設(shè)計(jì)[J]. 農(nóng)機(jī)化研究,2015,37(12):141-143.
Lu Yanfang, Sun Chuanzhu, Wang Faming, et al. The improved design of potato planter seeding-unit[J]. Journal of Agricultural Mechanization Research, 2015, 37(12): 141-143. (in Chinese with English abstract)
[31] 盧延芳. 馬鈴薯播種機(jī)智能控制系統(tǒng)研究[D]. 淄博:山東理工大學(xué),2016.
Lu Yanfang. Study on Intelligent Control System for Potato Seeder[D]. Zibo: Shandong University of Technology, 2016. (in Chinese with English abstract)
[32] 李云雁,胡傳榮. 試驗(yàn)設(shè)計(jì)與數(shù)據(jù)處理[M]. 北京:化學(xué)工業(yè)出版社,2008.
Design of intelligent control system of potato precision planter
Sun Chuanzhu1,2, Wang Faming1,2, Li Xueqiang2,3※, Su Guoliang2,3, Wang Xiangyou2,4, Wei Zhongcai2,5, Sun Jingbin2,4
(1.,255091,; 2.,253600,; 3..,.,253600,; 4.,255091,;5.,,100083,)
To solve the problems of low control precision of planting spacing and easily double planting and missing planting an intelligent control system of potato precision planter was developed in this study, which was constituted of a main control module, a detection module, a planting spacing control module, and a vibration intensity control module. A hydraulic motor was used to control the working of seed belt, a stepper motor was used to control the vibration intensity of the seed belt in order to achieve the auto-control of the planting spacing and the double or missing planting. The planting parameter could be set by touch screen according to the different potato varieties, area of planting and soil condition, and the information of planting spacing. As such, double planting and missing could be monitored. To test the machine, experiments were done. The test result showed that when the designed speed was 12-42 r/min, the deviation of actual speed and designed speedwould be 56.3%, but it would be 9.20% after one detection cycle and average deviation was 6.09%. When the different planting spaces were planted by using same planting speed, the actual planting spacing could be controlled within the allowable range, and the average deviation between the actual planting spacing by using each planting speed and the setting planting spacing was 2.65%, 3.37%, 3.67%, 5.75% and 4.09%, respectively. When the planting speed was increased from1.16 to 1.91 m/s, the variance of the each planting spacing in 150-300 mm increased by 1.75, 3.12, 4.18, 1.50, 3.28 and 7.06 times, respectively and the higher the planting speed, the lower the stability was. As such, lower planting speedshould be selected. The vibration intensity of seed belt was stronger, the replanting rate was lower and the missing seed rate was higher; When a strong vibration was reached, and vibration intensity of seed beltwas in violent vibration shape, the planting speed was 1.74 m/s and seed quality was 50 g, the replanting rate was the least. When thevibration intensity of seed beltwas in tiny vibration, the planting speed was 0.88 m/s and seed quality was30 g, the missing seed rate was the least;thevibration intensity of seed belthad significant influence on the double planting rate and thevibration intensity of seed beltand the planting speedhad significant influence on the missing seed rate. The primary and secondary order of the influence on the double planting and missing seed rate were the vibration intensity of seed belt, the planting speed, and seed quality. The optimal planting parameter: When a strong vibration was reached, and thevibration intensity of seed beltwas in slight vibration, the planting speed was1.16 m/s and seed quality was35 g. The average missing seed rate was 2.31% collected by the missing detection module and the actual average missing seed rate was 2.22%, there was a deviation, but the average detection error was 5.25% and the largest error was 6.58%, the detection accuracy was more than 93%. When the actual missing seed rate exceeded the allowable range, it would be adjusted into the allowable range in 2-3 cycles, and the stability was good. The research results can meet the requirement of the actual planting operation, and provide reference to the further research and popularization and application of the intelligent control of potato precision planting equipment.
crops; design; vibrations; precision planting; intelligent control; planting spacing; replanting rate; missing seed rate
10.11975/j.issn.1002-6819.2017.18.005
S223.2
A
1002-6819(2017)-18-0036-09
2017-03-16
2017-07-26
山東省財(cái)政農(nóng)業(yè)科技發(fā)展專項(xiàng)資金項(xiàng)目(魯財(cái)農(nóng)指[2015]28號(hào))
孫傳祝,男,教授,主要從事馬鈴薯全程機(jī)械化裝備與技術(shù)方面研究。Email:suncz@sdut.edu.cn
李學(xué)強(qiáng),男,高級(jí)工程師,主要從事馬鈴薯全程機(jī)械化裝備研發(fā)與應(yīng)用研究。Email:lxqllsd@163.com
猜你喜歡
科學(xué)大眾(2023年17期)2023-10-26 07:39:14
艦船科學(xué)技術(shù)(2022年8期)2022-06-05 07:36:28
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
瘋狂英語(yǔ)·新讀寫(2020年3期)2020-06-06 09:05:56
中國(guó)公路(2017年18期)2018-01-23 03:00:38
數(shù)學(xué)物理學(xué)報(bào)(2017年6期)2018-01-22 02:26:40