混凝土布料機器人機械臂鉸點優化分析
2017-10-19 09:23:32王云磊祁宇明鄧三鵬彭淑萍周旺發
裝備制造技術 2017年8期
王云磊,祁宇明,鄧三鵬,彭淑萍,周旺發
(1.天津職業技術師范大學機器人及智能裝備研究所,天津300222;2.天津博諾智創機器人技術有限公司,天津300350)
混凝土布料機器人機械臂鉸點優化分析
王云磊1,祁宇明1,鄧三鵬1,彭淑萍1,周旺發2
(1.天津職業技術師范大學機器人及智能裝備研究所,天津300222;2.天津博諾智創機器人技術有限公司,天津300350)
機械臂是混凝土布料機器人的重要部件,機械臂鉸點設計的合理與否決定了混凝土布料的穩定性和準確性。使用Solidworks軟件建立混凝土布料機器人機械臂的三維模型,并使用Solidworks motion對機械臂進行運動學的仿真,得出機械臂之間鉸點油缸的壓力曲線,并對鉸點進行優化設計。
機械臂;鉸點;運動學;優化設計
機械臂是混凝土布料機器人最為重要的部件之一,其主要作用是把水泥混凝土連續、均勻、精確地輸送到澆筑位置。機械臂的鉸點相當于布料機器人的關節,在混凝土澆筑過程中起到了關鍵的作用,其設計的合理與否直接影響混凝土布料機器人的綜合性能以及機械臂的澆筑精度。
Solidworks Motion是Solidworks的一個運動仿真模塊,其主要功能是為工程設計人員提供虛擬樣機的仿真分析工具,通過對復雜的機械零件進行動力學和運動學的仿真,獲得速度、加速度、作用力等相關數據,并應用圖標、動畫等方式表現出來,詳細地反映出機械零件間運動特性。本文使用Solidworks Motion軟件對混凝土布料機器人的機械臂鉸點進行優化分析。
1 機械臂鉸點數學模型的建立
使用三維軟件Solidworks建立混凝土布料機器人機械臂的三維模型,選用單缸六鉸點的機構連接各節機械臂,如圖1中(a)所示。一級節臂與二級節臂之間的連接機構主要有一級臂AC、變幅油缸AB、二力桿CE、彎連桿BED、二級臂OD等構件組成,如圖 1中(b)所示。
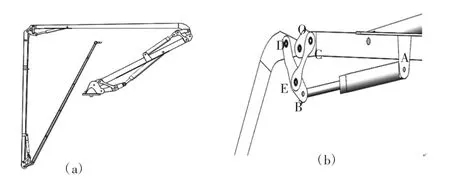
圖1 混凝土布料機器人三維模型
為了讓所建的數學模型具有普遍適用性,固定一級節臂的位置為水平伸展狀態,就可以方便計算一級節臂展開至任意角度時各個銷軸的鉸點位置。二級節臂以鉸點O為圓心轉動,二級節臂伸展為水平位置時為最大伸展行程,兩個節臂的夾角為180°.節臂執行布料作業時,如圖2所示,則有:
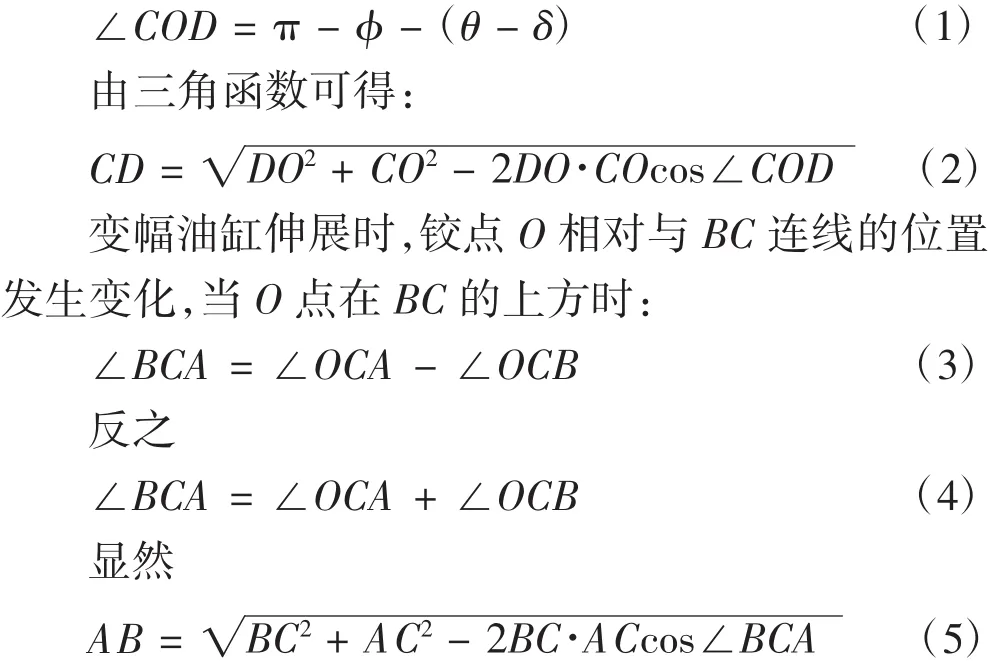
對各式聯立求解的

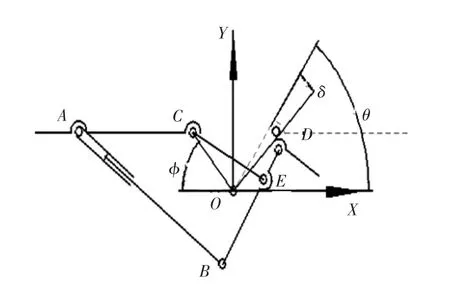
圖2 混凝土布料機器人鉸點結構圖
2 鉸點運動學優化
為了優化各級節臂間鉸點的應力分布,分別對各級節臂進行模擬仿真作業過程,由于各級節臂在轉動過程中只有變幅油缸提供動力,其他力均為定載荷,所以求解變幅油缸的最大力是優化鉸點的主要方法,在這里以回轉底座與一級節臂鉸點為例說明,其他幾部分分析優化方法相同。
如圖3所示,為了優化回轉底座與一級節臂鉸點的最大應力采取幾個步驟:第一步,二級節臂從水平位置順時針轉動至90°位置,二級節臂保持為豎直狀態;第二步,一級節臂從水平位置順時針轉動至90°位置,一級節臂保持為豎直狀態;第三步,二級臂由水平轉動至豎直位置,二級臂保持豎直狀態;第四步,三級臂逆時針轉動180°,保持豎直狀態;第五步,四級臂逆時針轉動180°,保持豎直狀態,考慮到實際作業過程設定整個動作過程為30 s.
圖3 混凝土布料臂仿真工況示意圖
確定變量。如圖4所示回轉底座與一級節臂鉸點結構簡圖,以回轉底座與一級臂連桿中的彎桿的鉸點為圓心O,建立坐標系。分別取A、B、C、D、E等點在X軸與Y軸投影得到各點在坐標系的坐標位置。取 AX、CX、DX、DY、LAC、LEC、LDB、LEB各線段作為優化的參考變量。
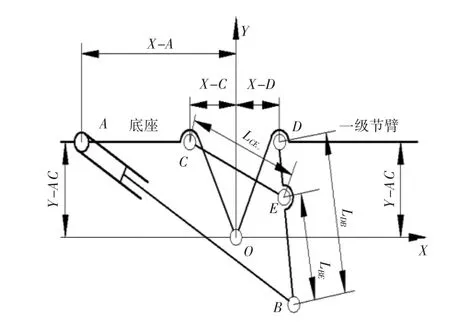
圖4 混凝土布料機器人各節臂鉸點結構簡圖
確定約束條件。各節臂、連桿的優化尺寸根據實際尺寸定義,在各機構連接仿真時不能發生干涉的前提下根據經驗提前設定相關部件尺寸。節臂與連桿組成的結構簡圖中各尺寸需要滿足三角形邊長條件,即任意兩邊之和大于第三邊。
確定優化目標。由于各級節臂在作業過程中只靠變幅油缸提供動力,其他力均忽略為定載荷,所以求解變幅油缸的最大力是優化鉸點的主要方法。通過Motion模塊仿真運動學解四種工況下變幅油缸的最小推桿力,最小推桿力所對應的鉸點位置尺寸即為最優尺寸。
回轉底座與一級節臂鉸點設計算例。如圖5所示為回轉底座與一級節臂鉸點系統建立設計算例,由上文可設定優化變量 AX、CX、DX、DY、LAC、LEC、LDB、LEB,各個尺寸在實際情況下均有可以優化的空間,設定傳感器2為邊長約束條件,傳感器6最小化的條件是監控變幅油缸的最小行程。優化算例總共運行了66次,優化后一級臂變幅油缸優化后壓力曲線變化如圖6所示,最大油缸壓力為161 212 N.優化后所得到的鉸點位置參數對機械臂重新建模如圖7所示。
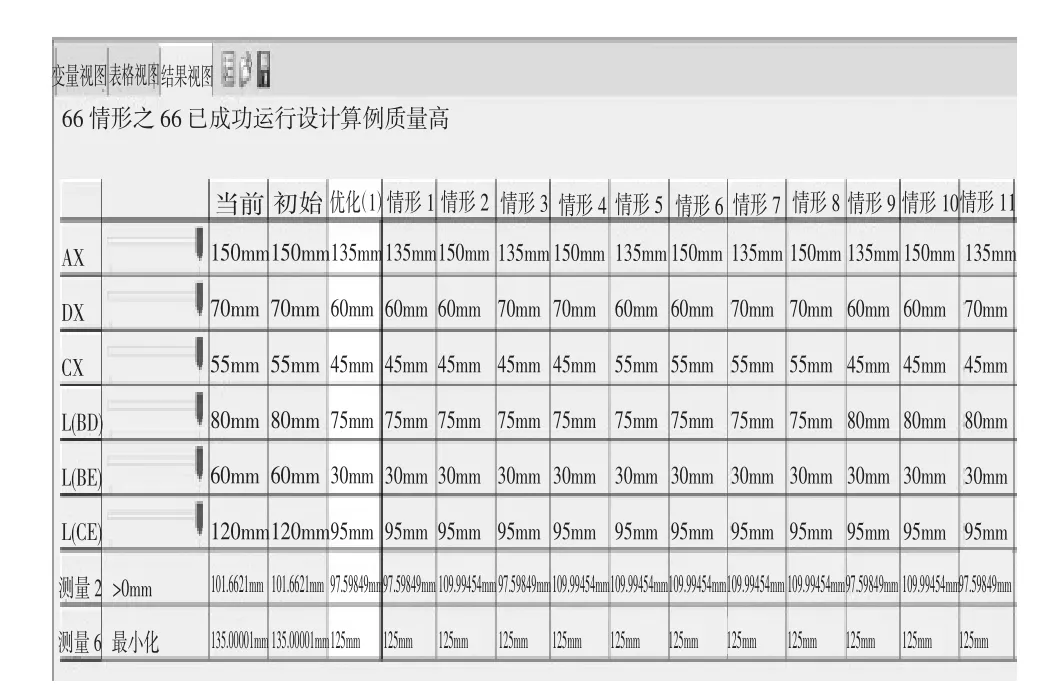
圖5 回轉底座與一級節臂鉸點系統設計算例
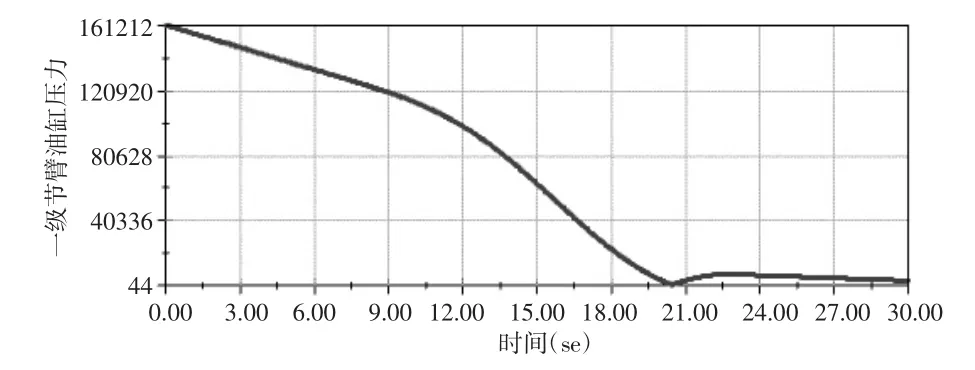
圖6 一級臂變幅油缸優化后壓力曲線
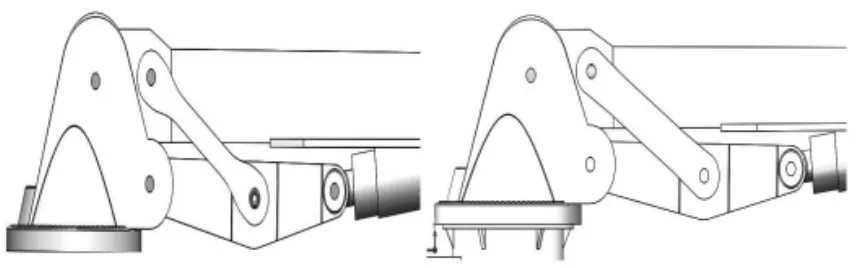
圖7 回轉底座與一級節臂鉸點系統優化對比結構圖
3 結論
建立機械臂鉸點的數學模型,得出混凝土布料機器人各節臂鉸點的結構簡圖,使用Solidworks Motion軟件得到機械臂運動的仿真運動,通過優化設計,得出一級節臂鉸點系統設計算例以及一級臂變幅油缸優化后的壓力曲線,最終得出一級臂鉸點系統的優化設計。各個節臂變幅油缸壓力減小意味著變幅機構中機械臂上鉸點處應力減小,這就大大的提高了機械臂系統的工作強度、使用壽命等。變幅油缸壓力的減小也可以減小變幅油缸的尺寸,降低機械臂本體重量。
[1]李立順.基于Solidworks Motion的隨車吊主要工作裝置仿真[J].科學技術與工程,2011(05):1070-1072.
[2]寇會民.基于SolidWorks Motion的壓床機構運動仿真分析[J].科技創新與應用,2015(30):64-65.
[3]陳國炎.基于Solidworks Motion軟件的機構運動仿真與分析[J].科技風,2014(01):125.
[4]蘇 武,許智慧.泵車支腿及布料臂架型式分析[J].建筑機械技術與管理,2002(12):43-46.
Optimization Analysis of Hinge Point of Robot Arm of Concrete Distributing Robot
WANG Yun-lei1,QI Yu-ming1,DENG San-peng1,PENG Shu-ping1,ZHOU Wang-fa2
(1.Institute of Robotics and Intelligent Equipment,Tianjin University of Technology and Education,Tianjin 300222,China;2.Tianjin Bonus Intelligent Creative Robotics Technology Go.,Ltd.,Tianjin 300350,China)
The mechanical arm is an important component of the concrete distributing robot.The design of the hinge point of the manipulator determines the stability and accuracy of the concrete fabric.The 3D model of concrete material robot manipulator is established using the solidworks software,simulation and kinematics of the manipulator using solidworks motion,the hinge cylinder pressure curve between manipulator,and optimize the design of the hinge point.
mechanical arm;hinge point;kinematics;optimal design
TH132
A
1672-545X(2017)08-0019-02
2017-05-14
天津職業技術師范大學研究生創新基金(YC17-22);國家科技支撐計劃課題(2015BAK06B04);天津市智能制造科技重大專項(15ZXZNGX00260);天津職業技術師范大學科技成果轉化培育類項目(ZHPY1602);天津職業技術師范大學科技計劃項目(KJ13-10)
王云磊(1993-),男,河北辛集人,碩士研究生,研究方向為智能機器人及其應用技術;祁宇明(1979-),湖北潛江人,工學博士,副教授,研究方向為機器人技術及應用;鄧三鵬(1978-),男,湖北襄阻人,工學博士,教授,主要研究方向為機器人系統集成及應用技術。
猜你喜歡
現代裝飾(2022年5期)2022-10-13 08:48:04
建材發展導向(2022年10期)2022-07-28 03:04:00
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
當代工人(2020年8期)2020-05-25 09:07:38
水利規劃與設計(2020年1期)2020-05-25 08:01:30
小哥白尼(趣味科學)(2019年3期)2019-06-17 11:57:44
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
