面向空間機械臂遙操作任務的客觀績效指標分析
2017-10-18 11:25:26薛書騏王春慧田志強姜國華
載人航天 2017年5期
薛書騏,王春慧,蔣 婷,田志強,姜國華
面向空間機械臂遙操作任務的客觀績效指標分析
薛書騏,王春慧,蔣 婷,田志強,姜國華?
(中國航天員科研訓練中心人因工程重點實驗室,北京100094)
面向空間站背景下的機械臂遙操作任務,總結并提出了11項操作者在手柄操作中的客觀績效指標,基于機械臂遙操作仿真平臺進行了機械臂轉移對接操作實驗。實驗結果表明:提供數值信息對多項操作績效指標有提升作用,4攝像機布置方案在到達關節限位次數指標上優于2攝像機布置方案;關節限位次數、錯誤操作次數、手柄控制效率等幾項指標,可以預測是否能夠成功完成對接任務。提出的手柄控制效率指標能夠預測操作用時以及到達限位位置風險等核心指標,可用于綜合評價實驗任務中人的操作效率。
遙操作;機械臂;績效指標;工效學
Abstract: As to the teleoperation tasks of space manipulator in the space station, 11 items of performance metrics in the operation were summarized,and the experiments of manipulator transfer and docking based on the manipulator teleoperation simulation platform were conducted.The results showed that: providing numerical information could promote several indexes, and the layout setting of 4 cameras was superior to that of the 2 cameras for the times of reaching joint limitation;the mission success could be predicted by the times of reaching joint limitation,the times of incorrect operation and the efficiency of operating the hand controllers;the efficiency of operating the hand controller proposed in this study could predict the completion time and the risk of reaching joint limitation,hence it may be used in the comprehensive evaluation of an operator’s performance in manipulator operation.
Key words:teleoperation; robotic arms; performance metrics; ergonomics
1 引言
空間站機械臂,在國際空間站的運營維護和執行任務中發揮著重要作用[1],其主要功能包括輔助航天員進行出艙活動、輔助進行目標航天器與空間站的交會對接、艙段轉位、捕獲目標飛行器、艙外狀態巡檢等[2]。在我國未來空間站規劃中,機械臂是其重要組成部分,是空間站建設和維護的關鍵裝備[3]。
對機械臂的遠程操控,雖然有計算機自動化操作的支持,但操作者(航天員)通過觀察人機界面(Human-Computer Interface, HCI)上的信息進行人工控制的遙操作模式仍然必不可少[4]。通過分析、提煉有效客觀的操作績效指標,能有效評價人員操作水平[5],進而有針對性地改善機械臂系統設計,可以提升操作成功率和操作效率,降低安全風險。
在機械臂遙操作模式下,操作者主要依靠安裝在機械臂上的局部攝像機和安裝在空間站艙體上的全局攝像機所拍攝的圖像信息,獲得對機械臂外部作業環境的感知[6],操作過程中需要對多個局部(隨動)和全局(固定)攝像機所提供畫面的認知加工和空間想象[7]。除了直觀的圖像信息以外,操作者還需要綜合關注機械臂的其他運行狀態信息。所以,機械臂遙操作任務是一項考驗操作者綜合認知和操作能力的復雜任務,對其操作水平的評價,也成為了訓練中的重要問題[8]。
國際空間站機械臂系統近20年來的訓練實踐,主要依靠NASA訓練師的主觀評價對受訓操作者的作業進行觀察,查看其對特定技能掌握的情況,并進行打分[5]。其主觀評價方法形成了一套通用機器人訓練(Genetic Robotic Training,GRT)手冊[9],表1節選了其中部分技能及技能標準。對GRT而言,雖然其標準中有客觀的部分,如是否出現碰撞、到達關節限位次數等,但主要還是依靠訓練師的主觀意見,這不利于評價標準化,也不利于受訓者進行自學。
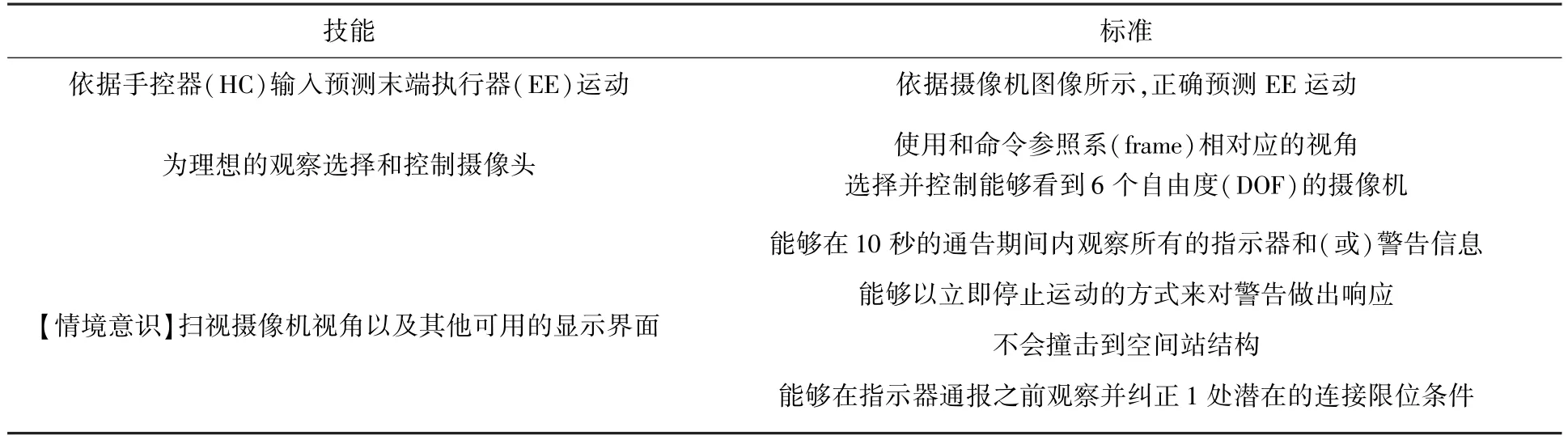
表1 NASA遠程機器人訓練評價手冊(GRT)標準(節選)Table 1 NASA GRT standards (excerpts)
除了NASA的研究,多年來亦有多位研究者對機器臂遙操作的客觀績效指標進行過探索,如Fry等人[10]在旨在向NASA機器人操作訓練提供可靠評價指標的研究中,提出并驗證了平順操作輸入和多軸操作輸入兩種有效指標;Lamb和Owen[11]在空間站機械臂仿真條件下進行了負載運動的操作實驗,選取了任務完成時間、操作失誤數和控制偏移程度幾項績效指標;Akagi等[12]在3自由度單監視器實驗條件下選取了完成時間、正確操作次數、行走距離等6項績效指標。但國外相關研究并未把客觀操作績效本身當作集中分析討論的目標,且其實驗任務多集中在機械臂移動(fly-to)任務,并未針對機械臂末端的精細操作任務進行績效研究。
面向空間站背景,以及其他應用環境下的機械臂遙操作任務,本文結合實驗任務特點,梳理并提出了多項操作績效指標。在機械臂遙操作仿真實驗平臺上進行模擬機械臂末端對接目標物的操作實驗,采集各項指標;通過分析不同實驗條件下各指標差異的顯著性和關鍵指標間的相關性,尋找影響操作成功率和安全性的關鍵要素;并驗證本文提出的指標的有效性。
2 機械臂遙操作任務的績效指標
本文在梳理上述研究的基礎上,面向空間站機械臂手柄遙操作的任務特點,針對機械臂末端對接目標物的操作任務,共提出11項客觀操作績效,見表2。其中,本文提出了8—11四項操作效率指標。
指標8能夠反映操作者觀察攝像機圖像,進行空間坐標系轉換的認知能力,錯誤操作越少,反映操作者對目標方位和機械臂末端方位的認識越準確;9對應機械臂末端在平移三個自由度上行走的效率,這個值越高,說明單位時間內走的距離越多,也就是操作者操作更順暢;10和11對應兩個手柄的操作效率,它們的值越低,說明彌補單位偏差的手柄操作量越少。在實驗研究中將會對這些指標的有效性進行驗證和分析。

表2 機械臂手柄遙操作客觀績效指標(共11項)Table 2 Objective performance metrics of manipulator operation with hand controllers
3 方法
3.1 實驗平臺
在V-REP PRO仿真機器人軟件平臺上,構建如圖1所示的實驗場景。機械臂基于沈陽新松SR6C型工業機器人進行仿真建模,該機械臂共有6關節,保證機械臂末端能以6自由度(3個平移自由度和3個姿態自由度)在工作空間內進行運動,這和空間站機械臂主要人控操作模式是類似的。實驗中被試操作者需要觀察虛擬攝像頭提供的圖像信息,通過控制左右手兩個操作手柄(萊仕達PNX-2103型),以機械臂末端坐標系為控制坐標系,進行仿真遙操作。
3.2 受試者
選擇16位受試者進行實驗操作。受試者均為男性,右利手,平均年齡24.4(標準差s=±1.5)歲,在實驗之前均無機械臂遙操作經驗,需要進行同質的試前培訓。
3.3 實驗任務
通過對空間站機械臂遙操作任務模式分析,本文設置操作任務如下:如圖1所示,在仿真實驗場景中機械臂末端上安置了1個十字形對接機構(用顏色標記其方向),在機械臂工作可達域內設置了兩個立方體對接目標塊,目標塊上各開設了3個十字槽;每次操作任務,系統會在6個十字槽對接面上隨機選取一個,并用顏色標記,即為當前操作任務對接目標;操作者需要在規定時間內(240 s)操作機械臂,使末端十字機構以顏色標記相對應的姿態插入選定的對接槽(對接成功條件是平移相對偏差小于0.004 m,姿態偏差小于4°),則操作成功,否則視為失敗。如果在操作中出現機械臂關節到達限位位置,或機械臂與外界產生碰撞,系統會彈出警告,要求操作者將機械臂調整到合理位置,再繼續進行操作。
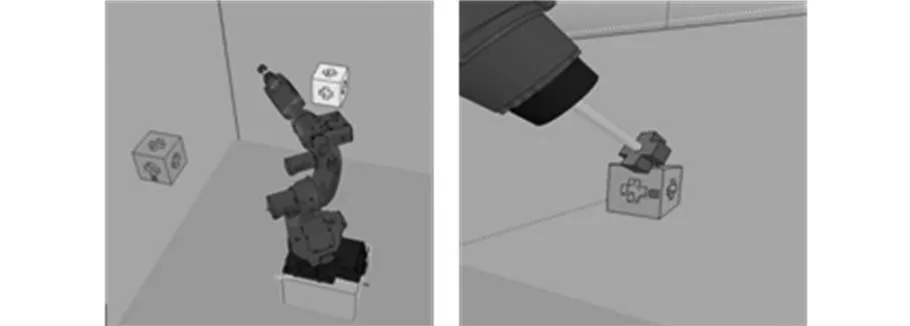
圖1 仿真實驗場景Fig.1 The simulated experimental scene
在受試者操作手柄控制機械臂執行本實驗設定的對接任務時,實際上經過兩個操作階段:第一階段是監視攝像機圖像(主要是全局攝像機),操作機械臂使對接目標面出現在末端局部攝像機的視野中;第二階段是主要依靠局部攝像機圖像,以及數值信息的輔助(當提供時),調整末端的位置和姿態,完成對接的精細操作。
實驗設置中末端運動速度保持勻速,難度(表現為初始距離和角度偏差)設置大體均等。
3.4 實驗設計
每位受試者在正式實驗前接受同等水平和流程的培訓。
實驗設計為兩因素兩水平組內實驗,兩種因素分別為是否有數值信息輔助和虛擬攝像機的安置數量(2或4),具體界面布局如圖2所示。
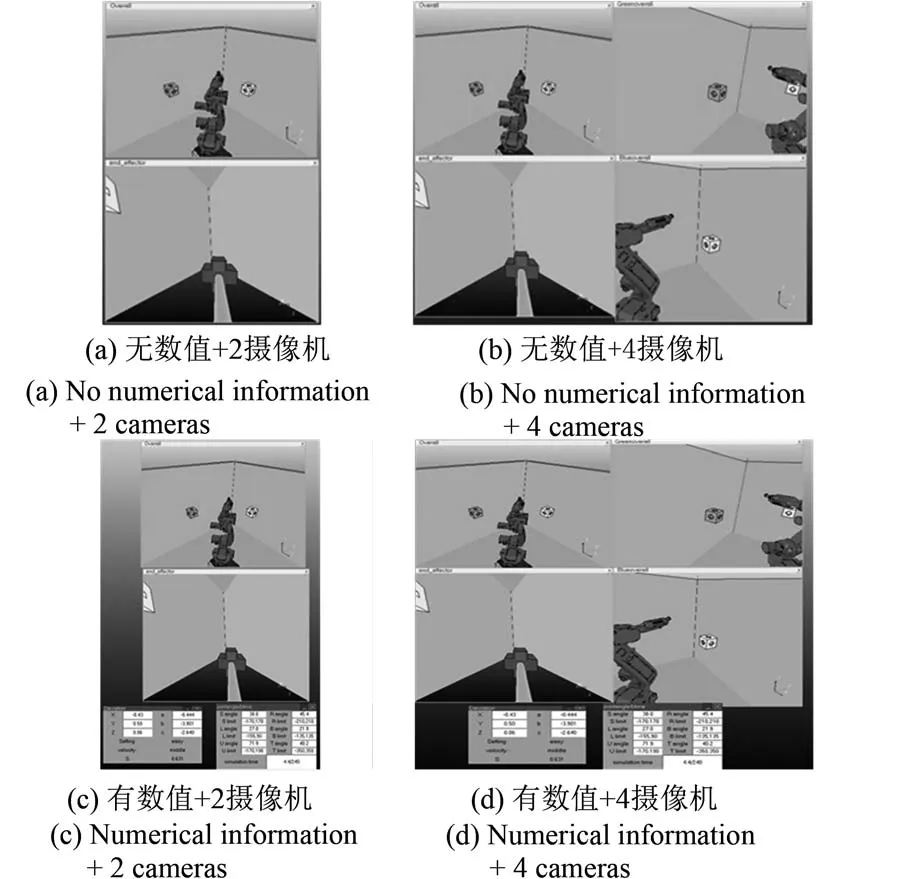
圖2 四種不同的HCI方案設置Fig.2 Four layout plans of HCI
其中數值信息提供末端與目標的6自由度相對偏差、六個關節各自當前所處的角度和角度位限、任務進行時間以及其他次要信息。在2攝像機的條件下,1個為末端的隨動(局部)攝像機,1個為能夠觀察到全部6個對接面的固定(全局)攝像機;4攝像機條件下,除了前面2個,再提供能分別從另一個角度觀察兩個對接目標立方體的全局攝像機,由于每次任務的對接目標只有一個,在4攝像機設置中,實際上只有3個攝像機起作用。
根據吳旭等人的注意力分配理論[13],操作者在操作中關注的信息不宜超過4項,在有數值+4攝像機實驗條件下,由于只有3攝像機起作用,達到了這個臨界值。
實驗假設認為提供數值信息和3有效攝像機的方案能夠幫助操作者提高操作績效。
16位受試者在4種界面設置條件下各進行2次對接操作。為避免學習效應,實驗順序采用拉丁方平衡設計。實驗平臺記錄受試者的操作數據,后期按照表2的要求整理成相應績效指標。
4 結果
對11項指標進行多因素方差分析的明,有數值疊加輔助信息條件下的實驗績效(除末端運動效率一項外)普遍優于無數值疊加的實驗績效,其中是否成功、碰撞次數、對接時間、平移手柄操作效率、姿態手柄操作效率等5項指標有顯著性差異(p<0.05)。4攝像機條件下的多數績效指標均優于2攝像機條件,但除了到達關節限位次數(方差分析F值及顯著度F=4.299,p=0.040)一項外,總體上各績效指標間沒有表現出統計學意義上的顯著性差異。分析兩種因素間交互作用的結果表明,交互作用對末端運動效率產生了顯著影響(F=4.690,p=0.032)。在分析中產生了顯著性差異的7項指標見表3。

表3 4種實驗條件下有顯著性差異操作績效指標的比較Table 3 Comparison of performance metrics(with significant difference) under 4 different experimental conditions.
所有操作的總體成功率為73.17%。分別比較成功組和失敗組之間其余的10項績效數據,通過顯著性分析發現,除了碰撞次數、多軸操作比率和末端運動效率外,成功組各項指標均顯著優于(p<0.003)失敗組。分別對操作成功和失敗的樣本進行組內2×2的多因素方差分析,發現在對接成功的操作中,是否有數值對碰撞次數、角度精度和姿態手柄操作效率產生了顯著影響(p<0.026),成功和失敗條件下的這3項指標對比條形圖見圖3;而攝像機布置僅對碰撞次數產生顯著影響(F=5.417,p=0.022)。在對接失敗的操 作中,實驗因素對操作績效的影響都不顯著。
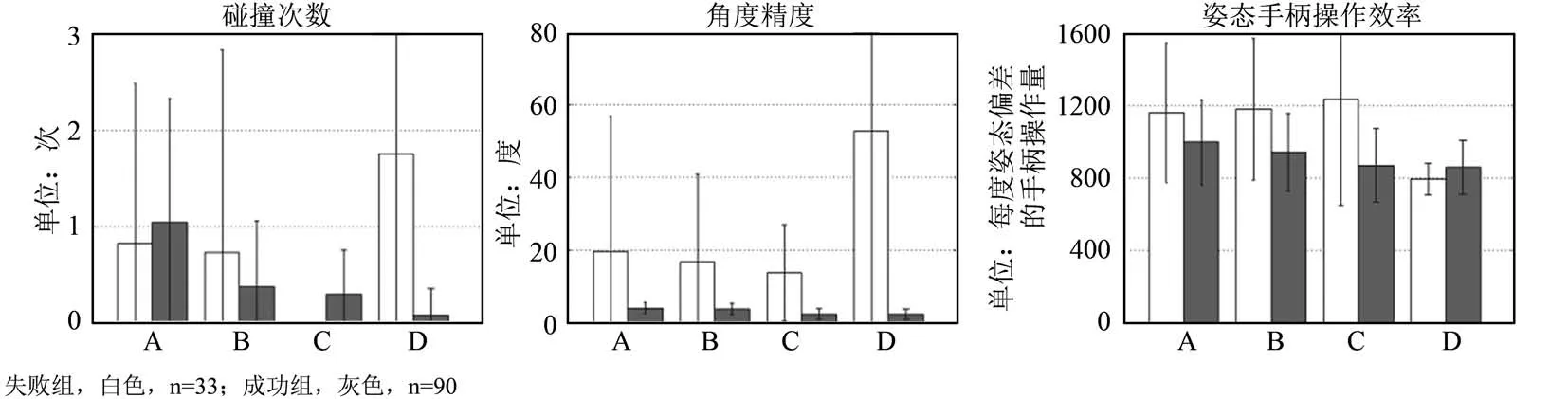
圖3 四種實驗條件下3項績效指標水平(碰撞次數、角度精度、姿態手柄操作效率)的比較Fig.3 Comparison of the metrics (times of collision, angle accuracy, efficiency of attitude hand controller operation)under 4 experimental conditions
對是否對接成功、碰撞次數、關節限位次數、對接時間等4項重要的績效指標,用其他的對接效率指標與它們做相關分析,以此找到對重要指標影響最大、相關性最密切的效率指標,其結果如表4所示。觀察表中相關性分析的具體結果可以發現,對于成功與否這項在本實驗中最為重要的績效指標,各指標都與其顯著相關;對兩項安全性指標(碰撞次數與關節限位次數,見表2),效率指標并不能很好預測碰撞次數,說明這項指標相對獨立,但末端運動效率和姿態操作效率兩項指標與到達關節限位次數相關性顯著;而對本實驗中較為重要的對接時間指標,各項效率指標都與其顯著相關。

表4 與關鍵績效指標相關性最顯著的其他指標Table 4 The most correlated other indexes to the key performance metrics
5 討論
5.1 實驗因素影響
受試者主要關注的數值信息是相對位姿偏差信息。對提供數值信息的操作,受試者一般在進入第二操作階段(見實驗任務)后會開始關注數值,控制機械臂末端位姿使之滿足預設的對接條件,即可對接成功,故有數值情況下的對接成功率顯著較優(F=4.545,p=0.035)。而本實驗中的碰撞基本全部發生在精細對接階段,在位姿偏差信息的輔助下,受試者能夠判斷是否有碰撞風險并進行規避,所以有數值的情況使碰撞次數出現顯著減小(F=5.214,p=0.024);偏差數值信息也能幫助受試者判斷當前手柄操作的正誤,即如果相對偏差的絕對值在減小,一般說明當前手柄操作的方向是正確的,所以手柄操作績效指標顯著較優(F=4.043,p=0.047;F=7.015,p=0.009)。
如前文所述,攝像頭布置主要起作用于第一操作階段。4攝像機(3有效攝像機)的設置方案中,受試者能夠(比數值)更直觀地判斷機械臂幾個關節是否有到達限位位置的風險,所以使這項指標出現了顯著(F=4.299,p=0.040)優化。但在本實驗任務中,同2攝像頭布置方案相比,4攝像機方案雖然在多數績效指標相對較優,但并沒有產生統計學意義上的顯著影響;說明在本實驗設置下,多攝像機觀察并未對績效指標產生決定性的影響,這可能是由于末端攝像機視角在末端坐標系控制模式中起到了極為關鍵的作用,而增加的輔助攝像機相對的重要性就出現了下降,從而對任務績效的影響也相對降低[14]。
在數值和攝像頭兩種因素的交互作用下,末端運動效率指標出現了顯著差異(F=4.690,p=0.032)。這說明在操作的第一階段,對相對偏差信息的理解和對多攝像頭協同觀察的理解產生了相互作用;兩種信息同時給出會造成某種程度的信息過剩,造成受試者注意力分配的困難[13],導致認知負擔增加,績效出現下降。
5.2 績效指標分析
根據任務分析,實驗因素分析,以及績效指標間相互關系分析的結果,分別討論各項(各組)績效指標。
1)對接成功以及對接時間。對接是否成功,不僅是本實驗,也是包括空間站以及其他應用背景下的機械臂遙操作任務的核心指標。在本實驗中對接時間的長短和對接精度只有在任務成功的條件下才有意義,所以沒有考慮這3項指標對成功與否的相關性。關節限位次數對是否能成功產生了顯著影響(見表3),這是由于到達限位需要受試者做復雜的操作判斷,以解除不安全狀態,這將耗費較長的操作時間。而本文提出的操作效率指標,尤其是錯誤操作次數,以及兩項手柄操作效率指標,能夠反映受試者高效的操作,故對成功與否,以及操作用時長短有明顯的預測作用。
2)安全性指標。在實際機械臂操作中產生與目標或障礙物的碰撞都是不可接受的危險行為,在本實驗中各效率指標與碰撞相關關系較弱(見表3),說明碰撞要作為相對獨立的指標加以考察。另一項指標關節限位次數也是機械臂操作中的重要考察指標[9],到達限位位置次數越多,越容易對硬件系統造成潛在損傷。避免這一不良狀態,主要依靠操作者保持良好的情境意識[15],而這也間接體現到良好的操作效率上(見表3),末端運動效率以及手柄操作效率都同關節限位次數顯著相關。
3)錯誤操作次數與多軸操作比率。這兩項指標是較為經典的機械臂遙操作效率指標,在GRT 和相關研究[9,11-12,15]中已有體現,在不同操作任務的背景和指標定義下起到了評價操作效率的作用。在本實驗任務中,錯誤操作次數可以有效預測是否成功、對接時間、關節限位次數等重要指標,體現了操作者對手柄操作的熟練程度,以及對情境信息理解的正確程度。而多軸操作效率并沒有表現出顯著的預測性,說明在本實驗的任務設置下這項績效指標效用較低。
4)末端運動效率。該指標主要在任務的第一階段起作用,受實驗2個因素交互作用的影響。該指標體現了受試者進行手柄操作的流暢性,也就反映了操作者進行判斷決策的連續性,故該指標對兩項安全性指標和對接時間的長短有著顯著的預測效果(見表4)。
5)手柄操作效率指標。本文提出的兩項手柄控制指標(見表2)反映了操作者在任務的整個階段通過圖像進行情境感知、操作手柄和完成任務的能力水平。在相對同等的難度下,操作量越少,說明效率越高,操作越準確。這兩項績效也同對接是否成功、對接時間長短、以及關節限位次數等重要指標顯著相關(見表4),說明通過對該項手柄操作客觀績效指標的針對性訓練能提高任務表現,在今后的機械臂遙操作人員訓練中,可以作為參考標準。
6 結論
面向空間站機械臂遙操作應用背景,本文通過對已有操作績效的歸納梳理和對實驗任務的分析,分析并提煉了11項有針對性的機械臂遙操作績效指標。通過是否有數值、2或4個攝像機布置的仿真操作實驗,收集了這些績效指標,通過績效數據分析,在本實驗任務條件下,得到如下結論:
1)有數值輔助信息對是否能夠對接成功、碰撞次數,以及多項操作效率績效指標有提升作用;4攝像機圖像條件下,能有效減少機械臂到達關節限位位置的次數。故本實驗條件下帶數值信息輔助的4攝像機布置界面是較優的HCI設計方案。
2)關節限位次數、錯誤操作次數、手柄控制效率等幾項指標,可有效預測是否能夠成功完成對接任務;碰撞次數指標相對獨立于各項效率指標,應單獨考察。
3)本文提出的3項操作效率績效指標(末端運動效率和平移、姿態手柄操作效率),能夠預測是否成功、到達限位位置風險以及對接時間等核心指標,可以用于綜合評價實驗任務中人的操作效率,指導操作訓練。
后續研究可以在本文基礎上通過已有的客觀指標,建立評價面向空間站機械臂遙操作績效的定量計算模型;可以進一步分析績效指標背后操作者的情境意識,以及情境意識與績效間的相互關系。
(References)
[1] 薛書騏,姜國華,田志強,等.空間遙操作任務中顯控界面關鍵技術研究進展[J].載人航天,2014,20(5):497-502.Xue Shuqi, Jiang Guohua, Tian Zhiqiang, et al.Progress of the key technologies in human-computer interface in space teleoperation[J].Manned Spaceflight, 2014, 20(5): 497-502(in Chinese).
[2] Lapointe J F, Dupuis E, Hartman L, et al.An analysis of low-earth orbit space operations[C] //2002.Joint Association of Canadian Ergonomists/Applied Ergonomics (ACE-AE)Conference, October 21-23, 2002.Banff, Alberta, Canada.NRC 44997.
[3] 張凱鋒,周暉,溫慶平,等.空間站機械臂研究[J].空間科學學報, 2010,30(6): 612-619.Zhang Kaifeng, Zhou Hui, Wen Qingping, et al.Review of the development of robotic manipulator for international space station[J].Chinese Journal of Space Science, 2010,30(6):612-619.(in Chinese)
[4] Sheridan T B.Telerobotics, Automation, and Human Supervisory Control[M].Cambridge, Massachusetts: MIT Press,1992:145-212.
[5] Zak H,Das H.Towards a training methodology for skilled teleoperation[J].Systems, Man and Cybernetics, IEEE Transactions on, 1995, 25(2): 313-327.
[ 6 ] Sheridan T B.Telerobotics[J].Automatica, 1989, 25(4):487-507.
[7] Menchaca-Brandan M A.Influence of Spatial Orientation and Spatial Visualization on Space Teleoperation Performance[D].Massachusetts Ave, Cambridge: Massachusetts Institute of Technology,2007.
[8] Van Woerkom P T L M,Misra A K.Robotic manipulators in space: a dynamics and control perspective[J].Acta astronautica, 1996, 38(4): 411-421.
[9] Forman R E.Objective Performance Metrics for Improved Space Telerobotics Training[D].Massachusetts Ave, Cambridge: Massachusetts Institute of Technology, 2011.
[10] Fry T L, Schlegel R E, Shehab R L, et al.Developing metrics to evaluate NASA RMS training performance[C]//IIE Annual Conference.Proceedings.Institute of Industrial Engineers-Publisher, 2003: 1.
[11] Lamb P, Owen D.Human performance in space telerobotic manipulation[C]//Proceedings of the ACM symposium on Virtual reality software and technology.ACM,2005:31-37.
[12] Akagi T M, Schlegel R E, Shehab R L, et al.Toward the construction of an efficient set of robot arm operator performance metrics[C] //Proceedings of the Human Factors and Ergonomics Society Annual Meeting.SAGE Publications, 2004,48(10): 1194-1198.
[13] 吳旭,完顏笑如,莊達民.多因素條件下注意力分配建模[J]. 北京航空航天大學學報,2013,39(8):1086-1090.Wu Xu, Wanyan Xiaoru, Zhuang Damin.Attention allocation modeling under multi-factor condition[J].Journal of Beijing University of Aeronautics and Astronautics, 2013, 39(8):1086-1090.(in Chinese)
[14] Li H,Wickens C D,Sarter N,et al.Stages and levels of automation in support of space teleoperations[J].Human Factors:The Journal of the Human Factors and Ergonomics Society, 2014, 56(6): 1050-1061.
[15] Endsley M R.Toward a theory of situation awareness in dynamic systems[J].Human Factors: The Journal of the Human Factors and Ergonomics Society, 1995, 37(1): 32-64.
(責任編輯:龍晉偉)
Analysis of Objective Performance Metrics for Space Manipulator Teleoperation
XUE Shuqi, WANG Chunhui,JIANG Ting, TIAN Zhiqiang,JIANG Guohua?
(China Astronaut Research and Training Center, National Key Laboratory of Human Factors Engineering,Beijing 100094, China)
V7
A
1674-5825(2017)05-0697-07
2016-03-10;
2017-06-12
裝備預研基金(9140C770202150C77317);人因工程國防科技重點實驗室預研基金(9140C770205150C77319);試驗技術研究青年基金項目(2015SY54C0703)
薛書騏,男,碩士,研究實習員,研究方向為航天人因工程、遙操作系統。E-mail:xavierxuper@163.com
?通訊作者:姜國華,男,碩士,研究員,研究方向為航天人因工程、航天器系統工程。E-mail:jgh_isme@sina.com
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
甘肅教育(2020年14期)2020-09-11 07:57:42
當代工人(2020年8期)2020-05-25 09:07:38
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
發明與創新(2016年38期)2016-08-22 03:02:52
科技知識動漫(2016年8期)2016-07-29 20:40:09
太空探索(2016年5期)2016-07-12 15:17:55
兒童故事畫報·發現號趣味百科(2015年12期)2016-01-25 00:41:49
時代英語·高二(2015年1期)2015-03-16 00:08:11