汽車尾門電動舉升機(jī)構(gòu)的設(shè)計(jì)研究
2017-10-17 03:41:51于波李超帥李健新林森李瑞生
汽車實(shí)用技術(shù) 2017年18期
于波,李超帥,李健新,林森,李瑞生
(華晨汽車工程研究院 閉合件工程室,遼寧 沈陽 110141)
汽車尾門電動舉升機(jī)構(gòu)的設(shè)計(jì)研究
于波,李超帥,李健新,林森,李瑞生
(華晨汽車工程研究院 閉合件工程室,遼寧 沈陽 110141)
為解決尾門電動機(jī)構(gòu)的布置問題,對擺臂連桿式尾門電動機(jī)構(gòu)建立了開閉過程的輸出力計(jì)算模型,得到了尾門電動機(jī)構(gòu)電機(jī)輸出扭矩的計(jì)算方法,并通過excel軟件建立公式得到了電機(jī)輸出扭矩隨尾門開度的變化曲線,簡化了尾門電動開閉可行性的校核過程。運(yùn)用CATIA DMU Kinematics模塊建立了尾門電動機(jī)構(gòu)的運(yùn)動仿真模型,輸出了空間距離動態(tài)曲線以及運(yùn)動包絡(luò)體作為邊界條件指導(dǎo)設(shè)計(jì)。
尾門;電動舉升機(jī)構(gòu);開閉力;運(yùn)動仿真
Abstract:In order to solve the layout problem of the power lift mechanism of tail door, the calculation model of the output force of the power lift mechanism of tail door was established, and the method for calculating the output torque of the motor was obtained. The curve of the motor torque with tail door opening angle was obtained by Excel software. The procedure of checking the electric feasibility of the tail door was simplified. The kinematic simulation model of the power lift mechanism was established by using CATIA DMU Kinematics module. The dynamic distance curve and the motion envelope were output as the boundary condition to guide the design.
Keywords: Tail gate; Power lift mechanism; Opening and closing force; Kinematic simulation
CLC NO.: U462.1 Document Code: A Article ID: 1671-7988 (2017)18-16-03
前言
隨著汽車電子技術(shù)的發(fā)展與成熟,汽車逐步向舒適化與智能化方向發(fā)展,電動尾門已經(jīng)成為各個主機(jī)廠在汽車產(chǎn)品設(shè)計(jì)、生產(chǎn)和銷售過程中廣泛應(yīng)用和推崇的技術(shù)。目前汽車應(yīng)用的尾門電動機(jī)構(gòu)主要分為兩種類型,一種為電動撐桿式,該結(jié)構(gòu)型式取代尾門氣彈簧,直接布置在車身流水槽內(nèi),具有結(jié)構(gòu)緊湊、外觀美觀、不占用側(cè)圍空間的特點(diǎn),多應(yīng)用于豪華SUV車型[1~2]。另一種為擺臂連桿式,該種結(jié)構(gòu)型式保留尾門氣彈簧,通過在車身側(cè)圍上安裝電動擺臂連桿,同氣彈簧共同作用實(shí)現(xiàn)尾門開閉運(yùn)動,該結(jié)構(gòu)型式占用一定的側(cè)圍空間,美觀程度較電動撐桿差,優(yōu)勢是可適應(yīng)尾門尺寸更大、重量更大,因此多應(yīng)用于尾門質(zhì)量較大的 MPV車型。本文針對擺臂連桿式電動尾門機(jī)構(gòu)進(jìn)行研究,通過建立其開閉過程的力學(xué)模型進(jìn)行力學(xué)性能計(jì)算校核,并基于 excel軟件形成開閉力計(jì)算表格,簡化了電動尾門的布置計(jì)算。并運(yùn)用 CATIA DMU模塊搭建完成尾門電動機(jī)構(gòu)的運(yùn)動仿真模型,為尾門電動舉升機(jī)構(gòu)布置與空間校核提供了理論依據(jù)。
1 尾門電動驅(qū)動機(jī)構(gòu)的開閉力計(jì)算模型
電動尾門系統(tǒng)包括控制模塊、驅(qū)動模塊、電動鎖模塊以及防夾模塊,驅(qū)動模塊與尾門氣彈簧共同作用,實(shí)現(xiàn)尾門的電動開啟與關(guān)閉,如圖1所示,為擺臂連桿式電動尾門驅(qū)動模塊結(jié)構(gòu)示意圖,主要由電機(jī)、擺臂與連桿三部分組成,電機(jī)通過安裝支架固定在車身側(cè)圍上,帶動擺臂旋轉(zhuǎn)運(yùn)動,連桿一端與擺臂連接,另一端與尾門連接,隨擺臂的旋轉(zhuǎn)帶動尾門運(yùn)動。

圖1 電動尾門驅(qū)動模塊示意圖
1.1 尾門電動驅(qū)動機(jī)構(gòu)開啟輸出力計(jì)算
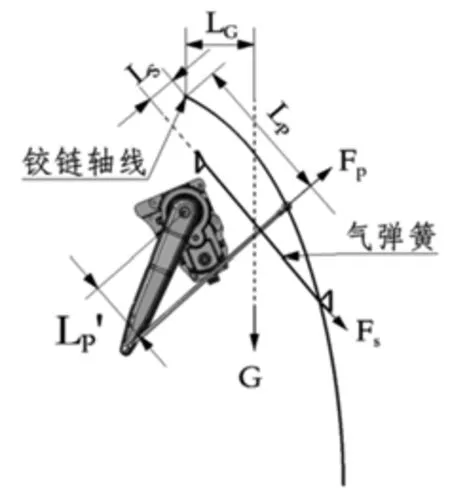
圖2 電動尾門開啟過程受力分析
如圖2所示,為電動尾門開啟過程受力分析,尾門氣彈簧與尾門電動機(jī)構(gòu)提供了尾門開啟的動力,尾門重力提供了尾門開啟的阻力,則尾門可實(shí)現(xiàn)電動開啟的條件為:

式中 FP為尾門電動機(jī)構(gòu)沿連桿方向的輸出力,F(xiàn)S為單根尾門氣彈簧沿氣彈簧軸線方向的輸出力,G為尾門總成的重力,LP、LS、LG分別為輸出力FP、FS、G以尾門鉸鏈軸線為旋轉(zhuǎn)軸的力臂。
1.2 尾門電動驅(qū)動機(jī)構(gòu)關(guān)閉輸出力計(jì)算
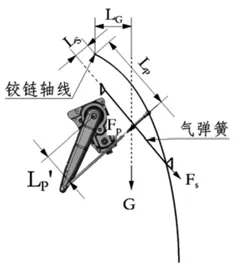
圖3 電動尾門關(guān)閉過程受力分析
如圖3所示,為電動尾門關(guān)閉過程受力分析,尾門重力與尾門電動機(jī)構(gòu)提供了尾門關(guān)閉的動力,尾門氣彈簧提供了尾門關(guān)閉的阻力,則尾門可實(shí)現(xiàn)電動關(guān)閉的條件為:

由公式(1)與公式(2)轉(zhuǎn)換可得尾門實(shí)現(xiàn)電動開閉的電機(jī)輸出扭矩需滿足:

2 基于excel的尾門電動機(jī)構(gòu)開閉力計(jì)算
在尾門開閉過程中,氣彈簧輸出力 FS與力臂 LG、LS、LP以及均隨尾門開閉角度的變化而變化,因此尾門電動機(jī)構(gòu)電機(jī)輸出扭矩M也隨尾門開閉角度的變化而變化,為簡化計(jì)算并準(zhǔn)確得出尾門在不同開度狀態(tài)下所需的電機(jī)輸出扭矩,以圖4所示的尾門關(guān)閉狀態(tài)下各點(diǎn)的坐標(biāo)為輸入條件,在 excel軟件中建立 FS、LG、LS、LP以及與尾門開閉角度的關(guān)系式,輸出尾門不同開度下實(shí)現(xiàn)開閉運(yùn)動所需電機(jī)扭矩M,與電機(jī)固有扭矩進(jìn)行對比曲線如圖5所示。
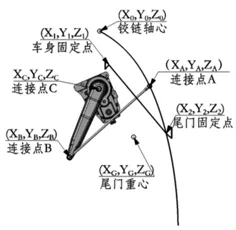
圖4 計(jì)算輸入點(diǎn)坐標(biāo)示意圖
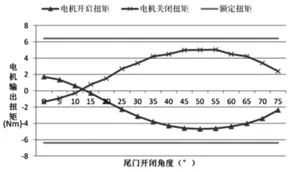
圖5 電機(jī)輸出扭矩隨尾門開度變化曲線
若尾門開閉全行程內(nèi)所需電機(jī)輸出扭矩均小于電機(jī)額定輸出扭矩,則機(jī)構(gòu)可實(shí)現(xiàn)尾門電動開閉,若尾門開閉全行程內(nèi)存在所需電機(jī)輸出扭矩大于電機(jī)額定輸出扭矩的位置,則該位置機(jī)構(gòu)不可實(shí)現(xiàn)尾門電動開閉,需重新調(diào)整電動機(jī)構(gòu)連接點(diǎn) A、B、C的布置位置或調(diào)整電機(jī)額定扭矩,以滿足功能要求。
3 基于CATIA DMU Kinematics的尾門電動機(jī)構(gòu)運(yùn)動仿真與空間校核
3.1 尾門電動機(jī)構(gòu)開閉系統(tǒng)數(shù)字模型建立
在CATIA DMU Kinematics模塊中建立尾門電動機(jī)構(gòu)的裝配體文件,并按照尾門電動機(jī)構(gòu)各構(gòu)件的實(shí)際空間位置建立位置約束,為下一步進(jìn)行運(yùn)動仿真做準(zhǔn)備,按照尾門電動機(jī)構(gòu)各構(gòu)件的相對運(yùn)動關(guān)系,建立裝配體結(jié)構(gòu)樹如圖6所示。
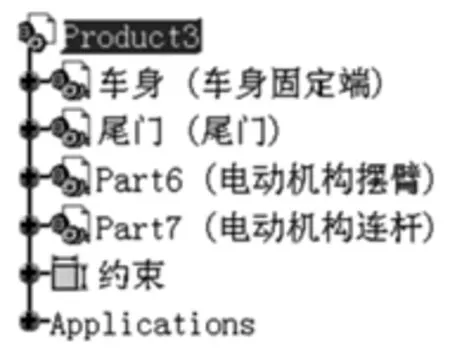
圖6 尾門電動機(jī)構(gòu)DMU構(gòu)件結(jié)構(gòu)樹
3.2 尾門電動機(jī)構(gòu)開閉系統(tǒng)運(yùn)動副建立
在尾門開閉過程中,尾門以鉸鏈為軸線繞車身進(jìn)行旋轉(zhuǎn)運(yùn)動,電動機(jī)構(gòu)擺臂以電機(jī)輸出軸為軸線進(jìn)行旋轉(zhuǎn)運(yùn)動,電動機(jī)構(gòu)連桿一端與尾門進(jìn)行連接,一端與電動機(jī)構(gòu)擺臂連接帶動尾門運(yùn)動。針對此運(yùn)動特征,對裝配體內(nèi)四個構(gòu)件建立圖7所示四個位置的運(yùn)動副,各運(yùn)動副的詳細(xì)信息如表1所示。
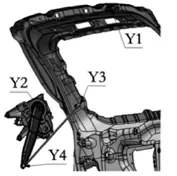
圖7 尾門電動機(jī)構(gòu)DMU運(yùn)動副約束位置
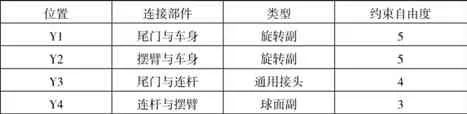
表1 尾門電動舉升機(jī)構(gòu)運(yùn)動副詳細(xì)信息
運(yùn)動副添加完成后,定義車身為固定構(gòu)件,并添加 Y1位置的旋轉(zhuǎn)副為驅(qū)動條件,最大驅(qū)動角度定義為尾門的最大開啟角度,至此尾門電動機(jī)構(gòu)運(yùn)動仿真模型建立完成,可進(jìn)行運(yùn)動仿真分析。
3.3 尾門電動機(jī)構(gòu)開閉系統(tǒng)運(yùn)動空間校核
在CATIA DMU Kinematics模塊中定義電動機(jī)構(gòu)擺臂與內(nèi)飾蓋板之間的距離與區(qū)域分析,添加自定義曲線,定義尾門饒車身的旋轉(zhuǎn)為橫坐標(biāo),電動機(jī)構(gòu)擺臂與內(nèi)飾蓋板之間的距離與區(qū)域分析為縱坐標(biāo)后進(jìn)行仿真分析,仿真完成后可輸出二者的關(guān)系曲線如圖8所示。在圖中點(diǎn)擊曲線上任意點(diǎn)位置,即可讀取此位置二者的空間距離數(shù)值,確保尾門全開閉過程中二者的安全間隙均大于6mm。采用同樣的方法,可對電動機(jī)構(gòu)連桿與周邊零件進(jìn)行動態(tài)距離分析。
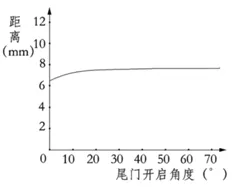
圖8 電動機(jī)構(gòu)擺臂與內(nèi)飾蓋板空間距離動態(tài)曲線
運(yùn)動仿真模型建立完成后,建立運(yùn)動機(jī)構(gòu)的模擬與重放,點(diǎn)擊包絡(luò)體命令,選取電動機(jī)構(gòu)擺臂與連桿作為建立運(yùn)動包絡(luò)體的構(gòu)件,可建立運(yùn)動包絡(luò)體如圖9所示。采用此運(yùn)動包絡(luò)體作為內(nèi)飾蓋板上電動機(jī)構(gòu)的開口輸出,空間位置準(zhǔn)確且設(shè)計(jì)效率高。
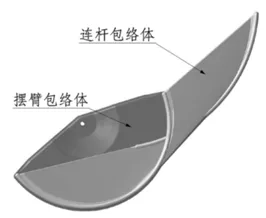
圖9 尾門電動機(jī)構(gòu)擺臂與連桿運(yùn)動包絡(luò)體
4 結(jié)論
通過對擺臂連桿式尾門電動機(jī)構(gòu)建立開閉過程的輸出力計(jì)算模型,得到尾門電動機(jī)構(gòu)電機(jī)輸出扭矩計(jì)算方法,并通過 excel軟件建立了 FS、LG、LS、LP以及與尾門開閉角度的關(guān)系式,得到了電機(jī)輸出扭矩M隨尾門開度的變化曲線,對尾門電動開閉可行性進(jìn)行校核。并運(yùn)用 CATIA DMU Kinematics模塊建立了尾門電動機(jī)構(gòu)的運(yùn)動仿真模型,輸出了空間距離動態(tài)曲線以及運(yùn)動包絡(luò)體作為邊界條件,大幅提高了尾門電動機(jī)構(gòu)空間位置的設(shè)計(jì)準(zhǔn)確度與設(shè)計(jì)效率。
[1] 李仲煒.汽車電動尾門關(guān)閉力問題的分析與改進(jìn)[J].汽車工程師,2016(2):55~56.
[2] 張兆民.基于LIN通信的電動尾門系統(tǒng)[J].汽車零部件,2015 (10):48~50.
Design And Research Of The Power Lift Mechanism Of Tail Door
Yu Bo, Li Chaoshuai, Li Jianxin, Lin Sen, Li Ruisheng
( Brilliance Automotive Engineering Research Institute Closure Section., Liaoning Shenyang 110141 )
U462.1 文獻(xiàn)標(biāo)識碼:A 文章編號:1671-7988 (2017)18-16-03
10.16638/j.cnki.1671-7988.2017.18.006
于波,就職于華晨汽車工程研究院。