城軌供電雙線圈接入式中壓能饋系統研究
2017-10-13 02:04:45林云志
電氣化鐵道 2017年3期
關鍵詞:系統
林云志,羅 金
?
城軌供電雙線圈接入式中壓能饋系統研究
林云志,羅 金
城市軌道交通車輛再生制動能量的有效吸收利用是牽引供電技術發展的一個重要課題。本文提出了一種新型城軌供電雙線圈接入式中壓能饋系統,逆變回饋裝置從整流變壓器1 180 V側雙線圈接入供電系統,制動能量通過整流變壓器回饋到35 kV中壓電網,從而實現節能效果。本文主要從能饋型再生制動裝置方案設計出發,著重介紹了系統的數學模型、控制策略及控制邏輯等內容。為驗證方案可靠有效,利用Matlab/Simulink仿真平臺搭建仿真模型,重點對共用整流變壓器方案時1.8 MW間歇循環峰值時直流母線電壓波形,整流支路電流波形,能饋系統回饋效率,交流側AC 35 kV相電壓、相電流、功率因數及諧波這幾個方面進行分析。仿真結果表明:該方案能可靠穩定的實現能量回饋功能,能饋過程中各性能指標良好,對整流機組的正常運行沒有影響。
城市軌道交通;雙線圈接入;中壓能饋再生制動;逆變;回饋;雙閉環控制;仿真建模
0 引言
隨著社會和科技的進步發展,人們的節能減排和環保意識也在逐漸增強。在城市軌道交通系統中,根據線路條件的差異,牽引負荷的用電量已占到總用電量的40%~70%。由于地鐵站間距較小,車輛運行時啟停頻繁,產生的制動能量較大,約有40%的能量被浪費。因此有效利用城市軌道車輛再生制動所產生的電能以減少運營的用電量對于改善城市軌道交通公共場所的環境是非常重要的。有效吸收電制動產生的能量將緩解因直流母線電壓過高而對相關設備造成損壞的程度。研究再生制動電能吸收裝置,對再生制動所產生的電能進行吸收、儲存和再利用已然成為軌道交通牽引供電技術發展的重要課題[1]。
為了能夠充分吸收利用車輛制動電能,世界上很多軌道交通發達的國家都在積極探討制動能量的利用模式,陸續提出了電阻耗能型、電容儲能型、飛輪儲能型、逆變回饋型等多種方式的再生電能吸收裝置。電阻耗能型再生能量通過發熱消耗,再生能量不能被有效利用,還需增加措施排出熱量,不具備節能效果[2]。電容儲能型對電容器要求較為嚴格,國內技術還尚未成熟,且電容器耐壓不夠,需大量配置,空間利用率低,使用壽命亦受到質疑,不利于推廣[3]。飛輪儲能型由于裝置特性原因,制造成本和維護成本都很高,裝置運行損耗大,影響裝置使用壽命[4]。逆變回饋型可分為逆變至AC 0.4 kV網絡和逆變至AC 35 kV網絡2種形式。逆變至AC 0.4 kV網絡無需配置儲能元件,技術方案成熟,利于國產化,缺點是屬于電阻耗能型和全逆變型的過渡產品,將電能逆變至低壓側,再生電能得不到充分利用,供電質量易受影響;逆變至AC 35 kV網絡沿襲了逆變至AC 0.4 kV網絡方式的優點,同時消除了其缺點,但是目前還缺乏大規模工程應用及運營維護經驗,單柜設備容量限制在2 M以內,提高容量時需增加變流器柜[5~9]。
本文研究一種新型城市軌道交通能饋型再生制動裝置接入方案,將再生制動裝置系統的交流側從整流變壓器1 180 V側的雙線圈接入供電系統,通過整流變壓器將制動能量回饋到35 kV中壓電網,實現車輛再生制動能量的回饋利用,從而達到降低能耗、節約能源、降低運營成本的目的。
1 能饋型再生制動裝置系統方案
1.1 系統接入方案介紹
能饋型再生制動裝置系統增加了回饋變流器的設計容量,利用2臺相角差30°的雙線圈隔離變壓器并聯,分別接至整流變壓器的2個低壓繞組(1 180 V)上,將制動能量通過整流變壓器回饋到35 kV中壓電網實現節能目的,隔離變壓器與整流變壓器對應雙分裂繞組保持同相位。能饋型再生制動裝置支持四象限運行,除回饋功能外還具備牽引及無功補償運行功能。系統接入方案如圖1所示。
1.2 能饋型再生制動裝置的設計及工作原理
能饋型再生制動裝置主要由并網開關柜、隔離變壓器、逆變柜、直流控制柜4部分組成,其結構如圖2所示。在變電所內設置1面并網開關柜,將再生制動裝置系統的交流側接入到整流變壓器二次側。所內1 500 V直流開關柜系統中擴展一路饋線,即1面1 500 V直流開關柜連接再生制動裝置系統的直流側。再生制動裝置系統的負極與變電所負母線相連。
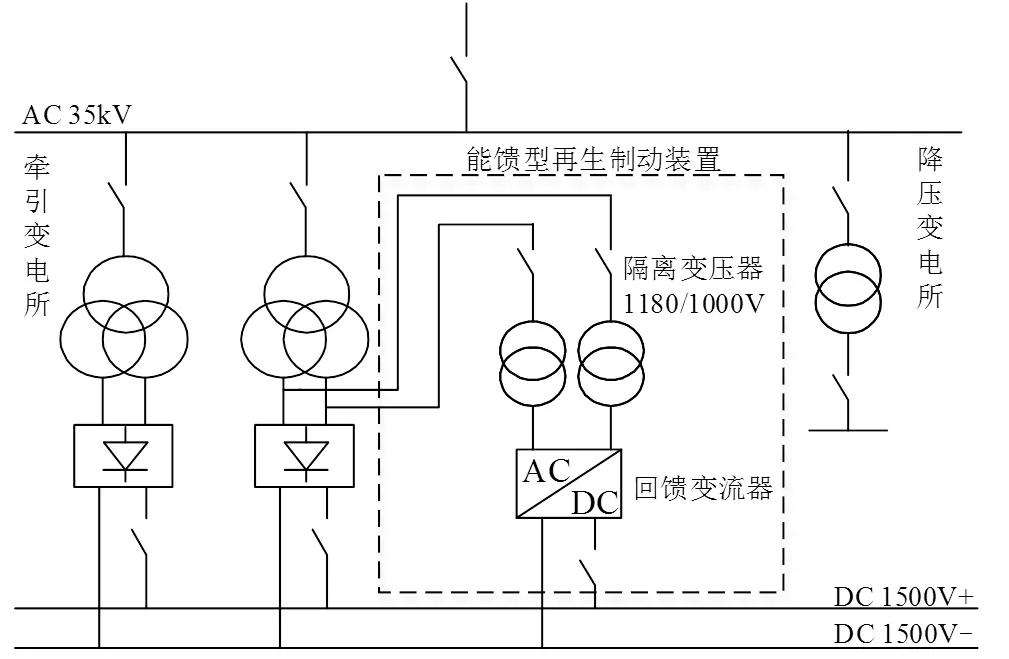
圖1 1 180 V側接入式(雙線圈)能饋型再生制動裝置系統接入方案圖
能饋型再生制動裝置的工作原理如下:
(1)列車正常發車啟動及運行時,再生能量回饋裝置不工作,二極管整流機組工作,向直流 1 500 V牽引電網饋能,為車輛提供牽引電能,此時電能轉化為車輛的動能。
(2)當車輛采取電制動時,列車的動能轉化為電能,回饋到直流1 500 V牽引電網,引起直流電網電壓升高。再生能量回饋裝置檢測到直流網壓升高到設定值,并確定列車處于制動狀態,回饋功能開始啟動,將這部分制動能量回饋到35 kV交流電網中,該過程中二極管整流機組反向截止,停止工作。
(3)當制動能量回饋完畢,直流網壓降到設定值時,再生能量回饋裝置停止回饋功能而轉入待機態,等待執行下一次回饋任務。
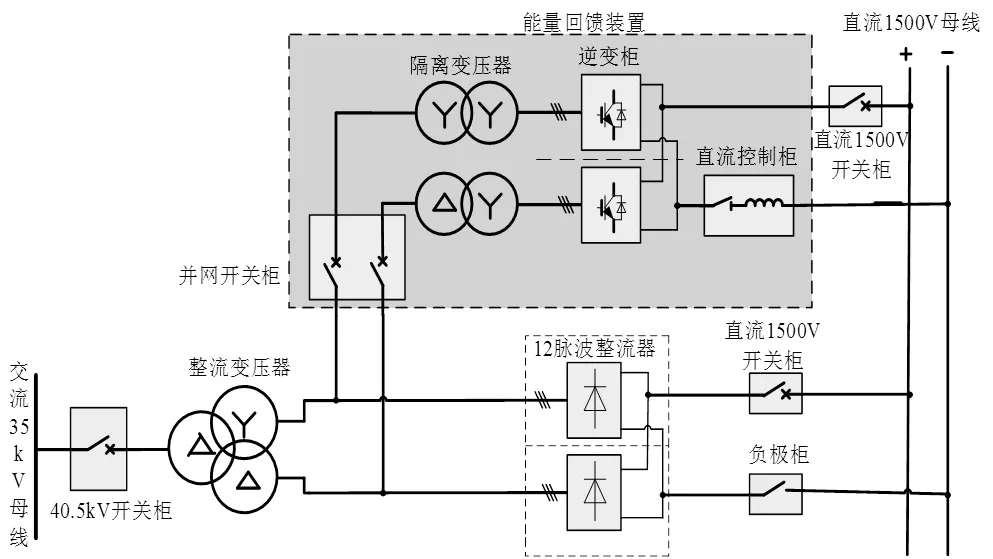
圖2 能饋型再生制動裝置結構圖
1.3 變流器模型研究
能饋型再生制動裝置中使用的變流器為多重化四象限電壓源型PWM變流器,該類型變流器具有功率雙向流動和功率因數可控的特性,當變流器從電網吸取電能時,其運行于整流狀態;當變流器向電網回饋電能時,系統運行于有源逆變狀態。正是由于這些良好的特性,該類變流器成為高鐵車輛、磁懸浮車輛牽引、柔性高壓直流輸電等領域的主拓撲方案采用的主要設備。
由于本文所述系統需要將直流側過多的再生制動能量回饋到三相交流電網,因此選用三相橋式拓撲結構的四象限電壓源型PWM變流器作為能饋型再生制動裝置中使用的變流器,如圖3所示。
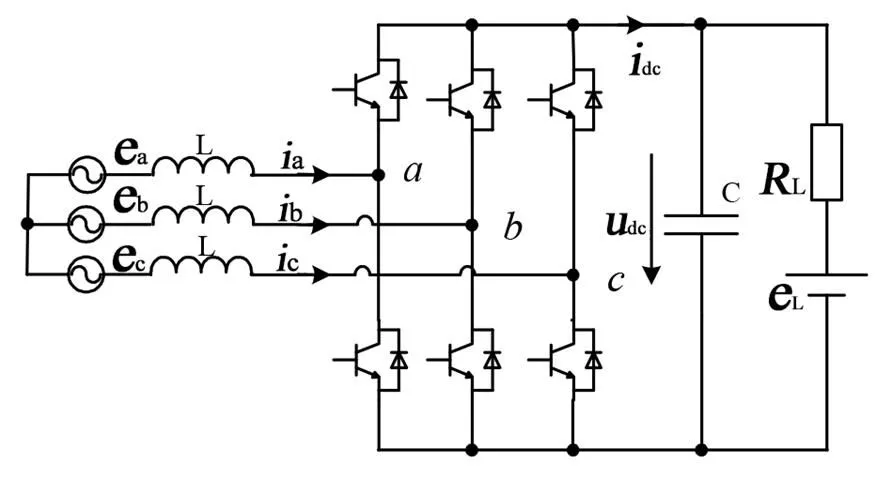
圖3 三相橋式PWM變流器拓撲圖
對于三相電壓源型四象限PWM變流器,其控制算法有多種,但最為穩定、使用最廣泛的是電壓外環、電流內環的直接電流控制算法。該控制算法通過測量變流器直流側電壓和交流側電流,矢量變換控制變流器閥側電壓,使交流側輸出電流與電網電壓反相,從而將多余的再生制動能量從直流側回饋到交流側,實現單位功率因數控制。調制方式采用兩電平雙模式空間矢量過調制方法,在滿足其可擴展性的同時,可以最大程度地提高直流母線電壓的利用率。此外,考慮到制動能量比較大,且系統諧波特性需滿足國家相關標準,因此主回路拓撲采用載波移相多重化方案。
1.4 數學模型和控制策略
雙閉環控制策略的基本原理:電流內環、電壓外環控制技術選擇基于同步旋轉坐標系的坐標變換,將三相電壓型PWM變流器的表達式轉換到同步旋轉坐標系下可得式(1)。
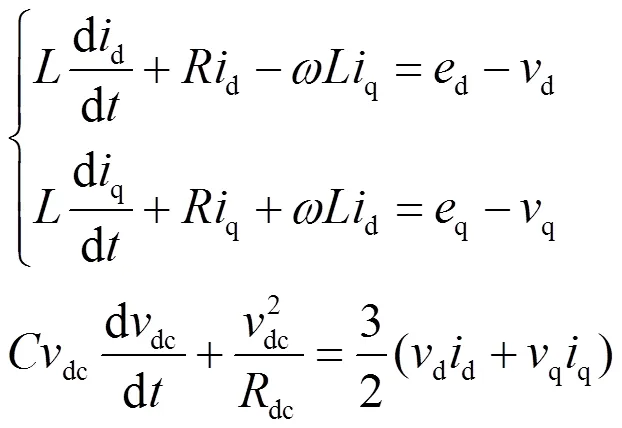
式中,d、q為同步旋轉坐標系下網側電流;d、q為同步旋轉坐標系下電網電壓;d、q為同步旋轉坐標系下整流器網側電壓;dc為直流側電壓。
由式(1)可知,整流器軸和軸存在耦合分量q和d,給控制系統的設計帶來不便,如若把這2個耦合分量視為2個電流控制的受控電壓源,那么適當的調節控制d、q便可實現系統的解耦。系統控制框圖見圖4[10~12]。
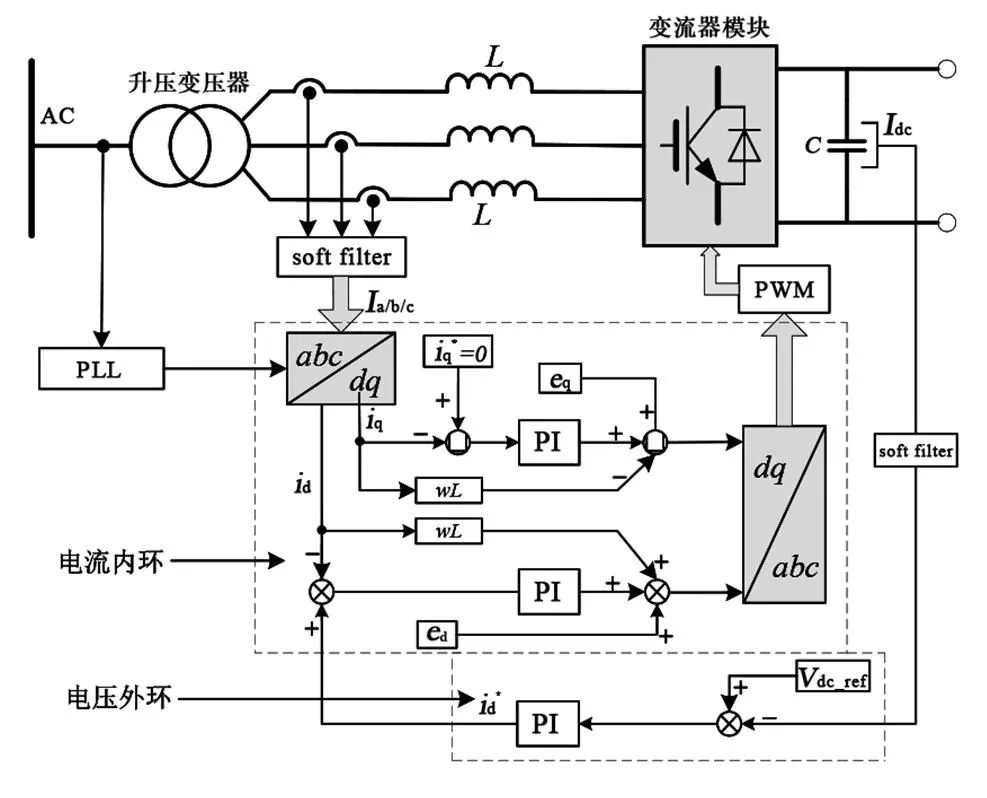
圖4 電壓外環,電流內環控制框圖
對于多重化變流器的協同控制,系統采用經典的共用電壓外環、獨立電流內環結構,如圖5所示。
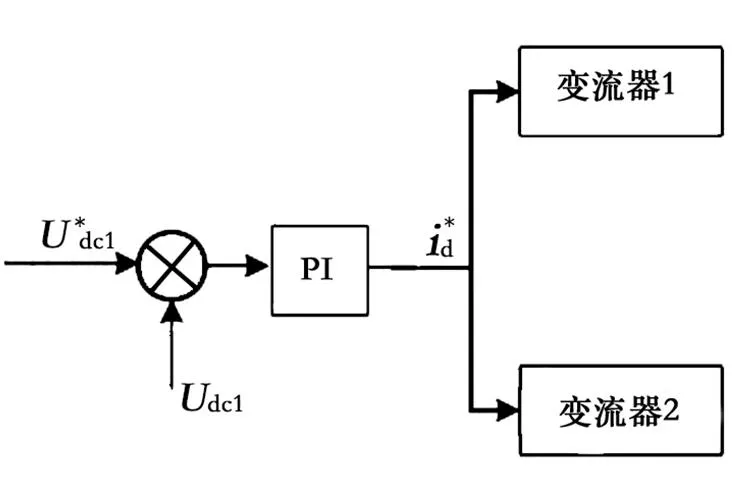
圖5 兩重化外層控制結構示意圖
1.5 能饋型再生制動裝置系統邏輯控制
系統邏輯控制主要是指結合系統所處狀態及預先設定的開關動作邏輯,對裝置中使用的接觸器、斷路器、中間繼電器等開關的通斷控制。
再生能量回饋系統工作狀態分為3種:待機態、運行態和故障態。裝置投入邏輯控制如圖6所示,系統上電后,DCU首先自檢(包括通訊等),并發出分自身主斷的命令,隨后進入待機狀態。在待機狀態時,DCU保持對整個系統的監視,如果發現異常,則報系統故障,裝置運行邏輯控制如圖7所示。回饋功能啟動條件:直流母線電壓檢測值大于直流母線空載電壓歸算值+30 V;回饋停止條件:裝置直流側電流呈下降態,且平均值小于20 A。

圖6 裝置投入邏輯控制圖
故障態指裝置在待機或運行過程中,被監控參量超出要求范圍或被監控設備不按要求動作或其他設備發生故障時,裝置進入一種保護自身及牽引所內其他關聯設備的狀態。裝置在故障態或收到正常退出指令后執行退出邏輯,裝置退出邏輯控制圖見圖8。

圖7 裝置運行邏輯控制圖

圖8 裝置退出邏輯控制圖
1.6 穩定直流母線電壓及單位功率因數控制
本文所述能饋系統具有穩定直流母線電壓的功能,通過逆變柜的逆變回饋功能及控制軟件中的穩壓控制環節實現。直流電壓波動小及直流側的濾波電感的存在,將極大減少逆變時從直流牽引網流入能饋裝置的高頻諧波含量。單位功率因數控制功能則通過控制軟件中的電流環流實現,可基本消除無功功率。
能饋裝置采用經典的電壓、電流雙閉環PWM四象限變流器控制策略。電壓外環作為控制外環,通過測量逆變器實際輸出的直流電壓,與設定的穩定電壓值比較,進行閉環控制,并給出電流內環的有功電流給定值,使得整套裝置能夠按照設定的穩壓值進行輸出,在額定功率范圍內,達到穩定直流母線電壓的目的,如圖4、圖5系統電壓外環控制框圖所示。
電流內環作為控制內環的底層,通過對逆變器直流側電壓和交流側電流進行測量,并采用基于同步旋轉坐標變化的控制方式,將交流電流轉換成直流電流,從而實現有功電流、無功電流的獨立閉環控制,并通過將無功電流設置為零的方式,使得逆變器輸出的功率因數達到-1,實現系統單位功率因數控制,見圖4。
1.7 消諧控制方法
本文所述方案采用兩重功率模塊,為降低注入到交流電網的諧波含量,可通過載波移相控制算法來實現。
載波移相技術通過將載波均勻平移一定的相位來對PWM變換器進行調制,在實際應用中,采用移相360o/方式,如重數為8重,每重間的載波均勻移相45o,構成8路移相載波波形,進而對SVPWM生成波形進行調制,移相波形如圖9所示。

圖9 移相載波(移相45°)波形圖
圖10、圖11分別為兩重功率模塊間采用載波移相與不采用載波移相技術時注入中壓網側諧波電流THD圖。可以看出,采用載波移相時電流中壓網側諧波畸變率為3.18%,未采用載波移相技術時中壓網側諧波畸變率為7.95%。

圖10 采用載波移相時中壓網側的電流THD圖

圖11 未采用載波移相時中壓網側的電流THD圖
圖12、圖13分別為2種模式下兩重模塊間A相電流波形圖,從圖中可以看出,采用載波移相時,兩重電流相互疊加,可以消除10 kV側電流波形中的尖峰(圖12中,10 kV側電流被放大了);未采用載波移相時,兩重電流相互疊加,導致10 kV側電流波形中的尖峰成倍增加。
由以上分析可以得出結論,多重間載波移相技術是消除網側電流及電壓諧波的有效手段。
2 方案仿真模擬計算
由于該方案裝置接入整流變壓器2個低壓端共同回饋,因此可以將回饋變流器的容量提高到整流變壓器容量附近(2 000~2 500 kW),這樣變電所內的回饋裝置可基本將進站車輛制動功率全部吸收利用,基本不需要鄰所回饋裝置輔助吸收,節能效果更優。
為了驗證該方案的可行性,本文對方案進行了基于Matlab/Simulink仿真平臺的仿真模型搭建,對其功能和性能進行了仿真驗證,并對該系統的功能實現進行理論驗證,觀察系統內各部件工作狀態是否滿足要求,以便優化設計系統參數,并對系統運行過程中可能出現的問題進行前期預判。
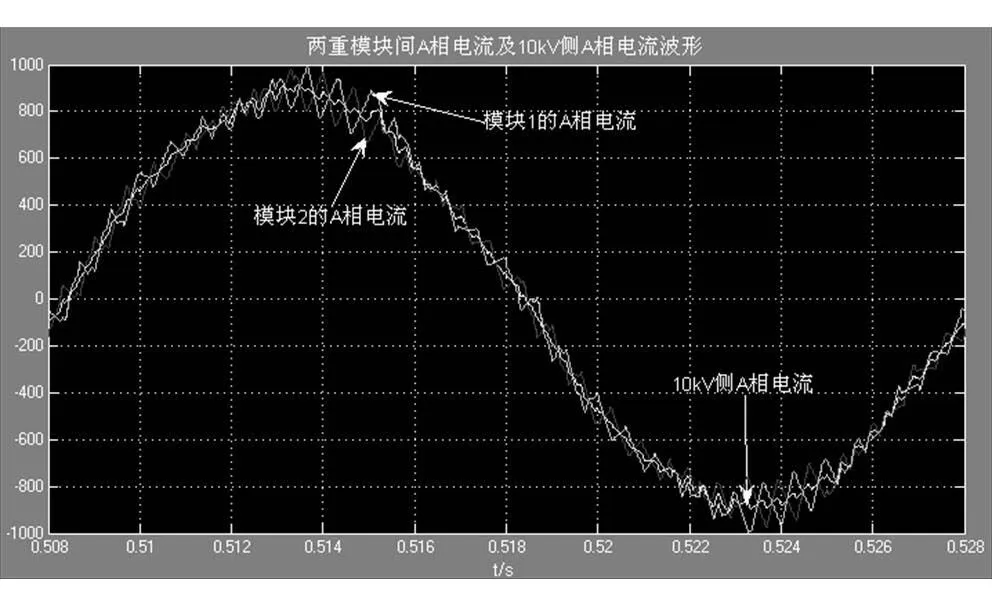
圖12 采用載波移相時兩重模塊間A相電流波形圖

圖13 未采用載波移相時兩重模塊間A相電流波形圖
2.1 仿真模型搭建
驗證方案的仿真模型如圖14所示,其中深色部分為各部件輸入輸出信號和PWM逆變器模塊。系統設置能量回饋電壓啟動值為1 720 V,能饋裝置啟動后,系統通過雙閉環控制將直流母線電壓穩定在1 720 V,回饋能量的間歇循環功率(峰值功率)為1.8 MW。
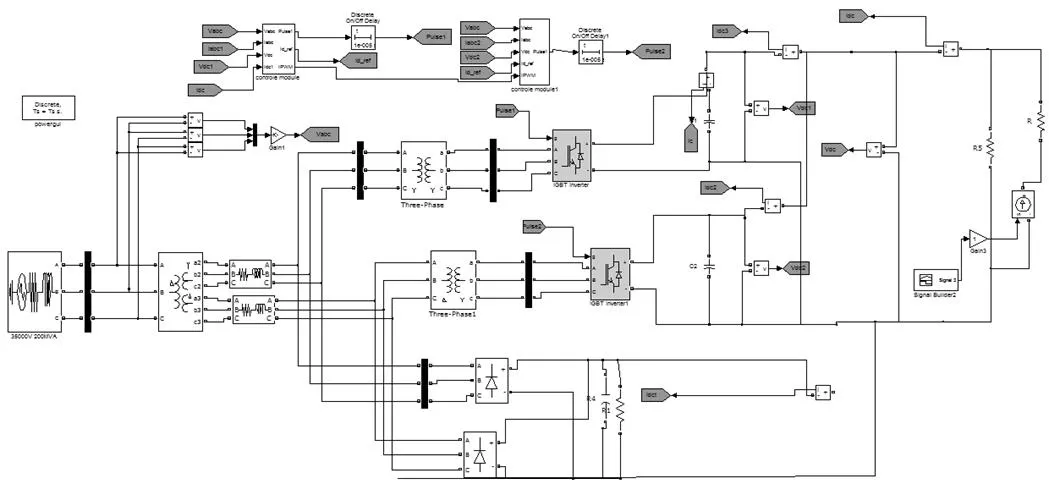
圖14 共用整流變壓器型能量回饋系統仿真模型圖
仿真過程:仿真步長為10-5s,仿真時長為1 s,0—0.15 s模擬空載狀態;0.15—0.55 s模擬列車制動,能饋系統工作過程,在0.15 s時列車開始制動,0.2 s時達到回饋峰值功率,0.5 s時回饋功率開始下降,0.55 s時回饋功率降為0;0.55—0.65 s列車停止運行,仿真中設列車停止運行時直流電流為0;0.65—1 s模擬列車運行,二極管整流機組工作過程。整個仿真運行過程如圖15所示,仿真過程中設能量回饋時的直流電流為正,整流時的直流電流為負。
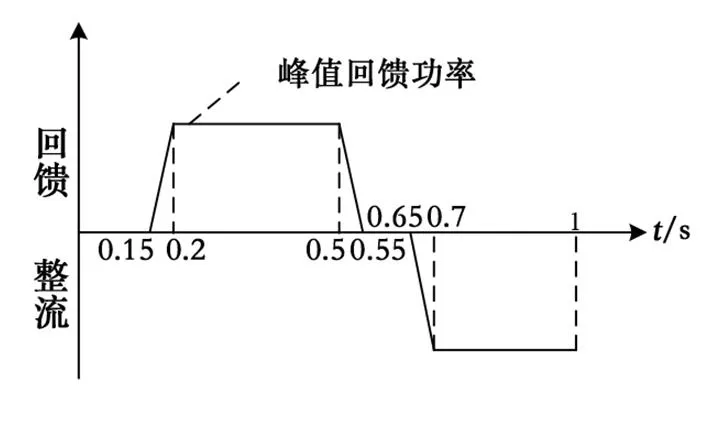
圖15 仿真運行過程示意圖
2.2 仿真結果及分析
2.2.1 直流母線電壓變化波形
直流母線電壓是判斷能饋系統能否可靠運行的一個重要因素,圖16為1.8 MW間歇循環峰值回饋功率下的直流母線電壓波形圖。圖中縱坐標dc表示直流母線電壓,其中支撐電壓初始值為 1 650 V。在0.15 s前系統處于空載狀態,直流母線空載電壓約為1 652 V。0.15 s時列車進入制動狀態,直流母線電壓開始抬升,升至1 720 V時達到能饋系統啟動門檻值,能饋裝置開始運行。
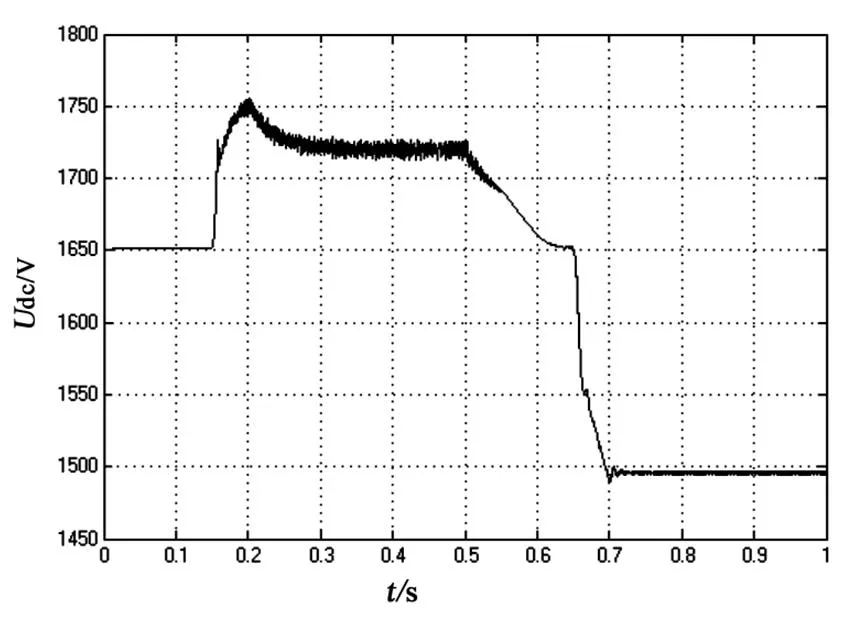
圖16 直流母線電壓波形圖
從圖16中可以看到,在1.8 MW間歇循環峰值回饋功率時,能饋裝置投入瞬間,直流母線電壓在控制系統的作用下快速響應,有35 V左右的超調量,并在0.15 s內迅速恢復穩定,維持在1 720 V左右,直流母線電壓穩定后有10 V左右的震蕩。可見能饋系統在列車制動引起直流母線電壓抬升時能快速響應,并能很好地維持直流母線電壓穩定。0.5 s時回饋功率開始下降,并在0.55 s時降至0,0.55—0.65 s列車處于停車狀態,該過程中直流母線電壓開始下降。0.65 s時列車開始啟動運行,二極管整流機組開始工作,直流母線電壓有較大下降,最終穩定在1 500 V左右。
2.2.2 整流支路電流
圖17為共用整流變壓器方案在1.8 MW間歇循環峰值回饋功率時仿真得到的整流支路電流d的波形圖,可以看到在能量回饋過程中(0.15—0.55 s),整流支路上均有10 A左右的環流,在 0.65 s后,二極管整流支路電流迅速增大,達到設定值輸出。
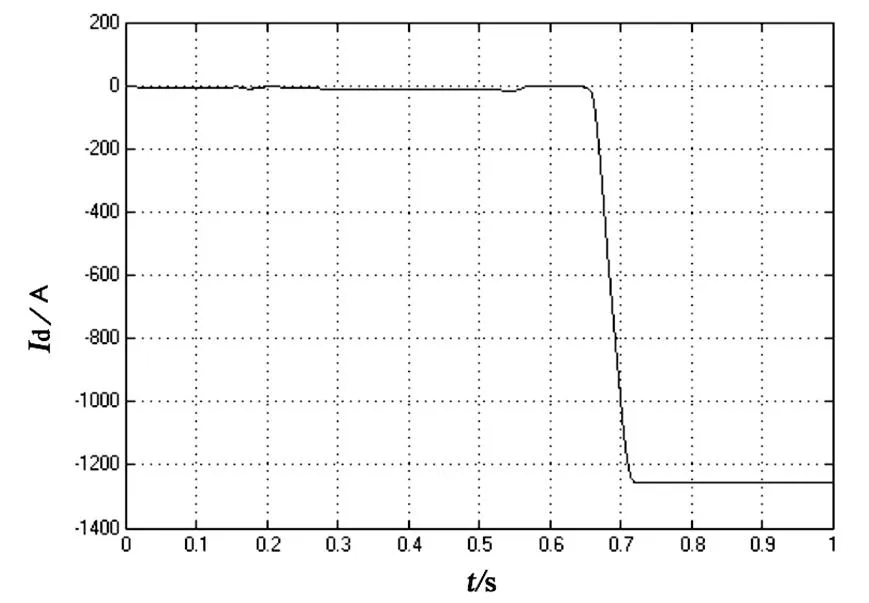
圖17 整流支路電流波形圖
2.2.3 能饋系統回饋效率
能量回饋效率是能饋系統的一個重要指標,圖18為共用整流變壓器方案在1.8 MW間歇循環峰值回饋功率時的回饋效率圖。由圖可以看出,當系統處于能量回饋狀態時,在1.8 MW間歇循環峰值回饋功率情況下,能饋系統的能量回饋效率均能達到96%,回饋效率較高。
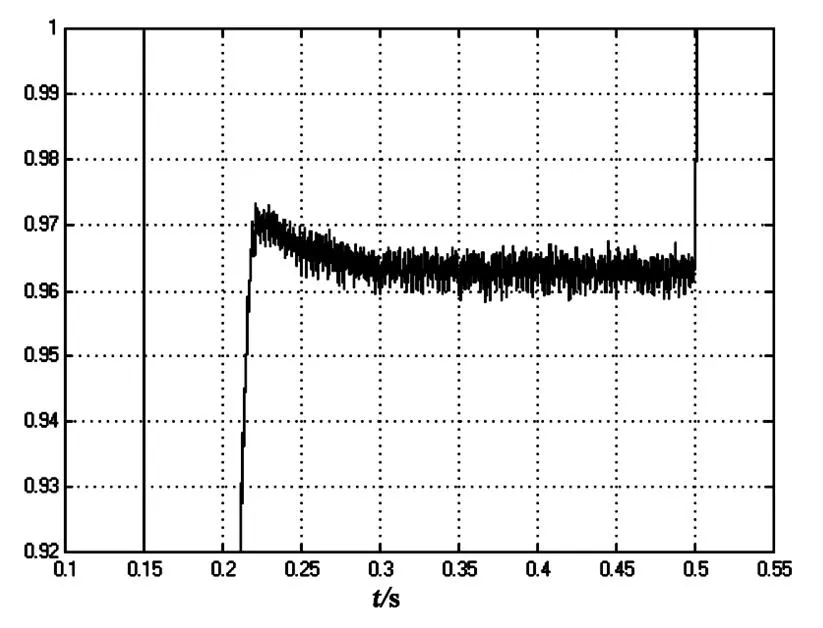
圖18 能量回饋效率波形圖
2.2.4 AC 35 kV網側相電壓、相電流及功率因數
圖19—圖21為1.8 MW間歇循環峰值回饋功率時的AC 35 kV網側相電壓、相電流波形圖,為了方便在示波器中同時觀測電壓、電流,圖中顯示的交流電壓波形為實際交流電壓乘以0.002的增益后的波形。圖19為整個仿真過程的相電壓、相電流波形,圖20為能饋裝置工作過程的AC 35 kV網側相電壓、相電流波形,可以看到在能饋過程中,AC 35 kV網側相電壓、相電流波形正弦性好,AC 35 kV網側相電壓、相電流的相位相反,此時處于逆變狀態。圖21為二極管整流機組工作時的AC 35 kV網側相電壓、相電流波形,此時處于整流狀態。
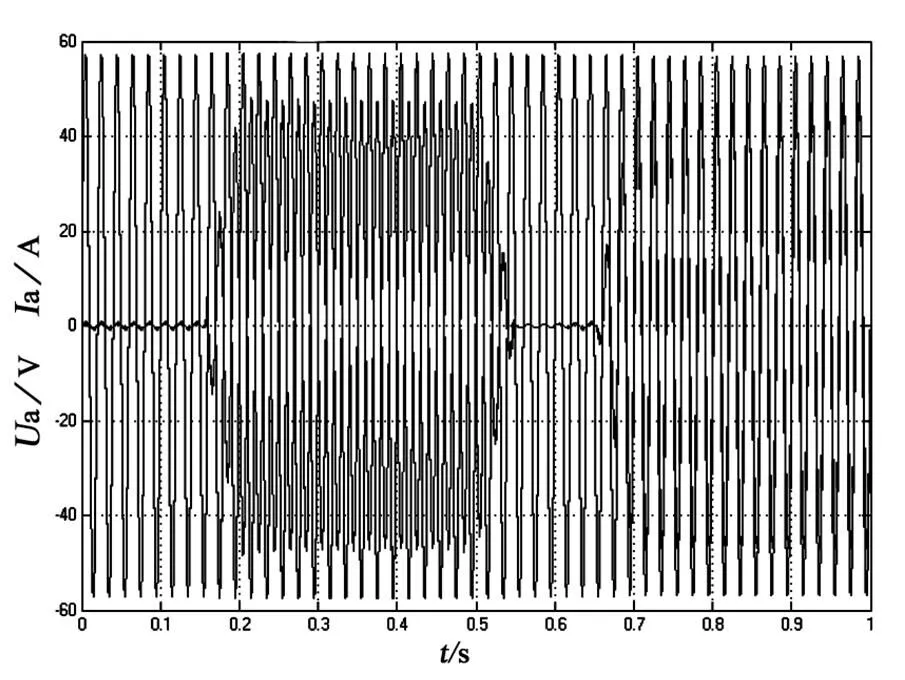
圖19 AC 35 kV網側整體相電壓、相電流波形圖

圖20 AC 35 kV網側回饋相電壓、相電流波形圖

圖21 AC 35 kV網側整流相電壓、相電流波形圖
圖22—圖24為1.8 MW間歇循環峰值回饋功率時的功率因數波形圖,從圖中可以看到,在能饋過程中功率因數接近-1,為單位功率因數;在二極管整流機組牽引供電過程中,功率因數為0.972。
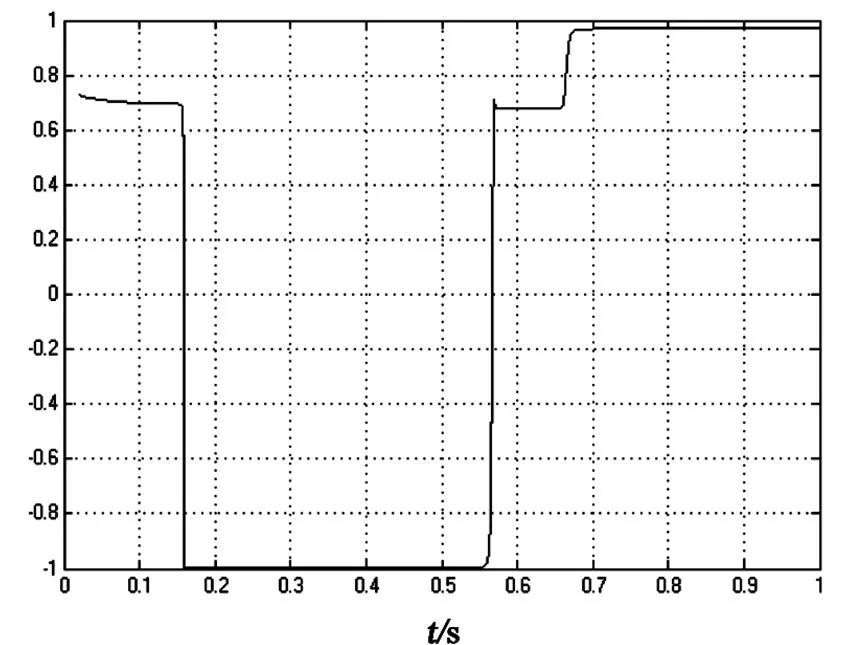
圖22 1.8 MW間歇循環峰值回饋功率時整體功率因數波形圖
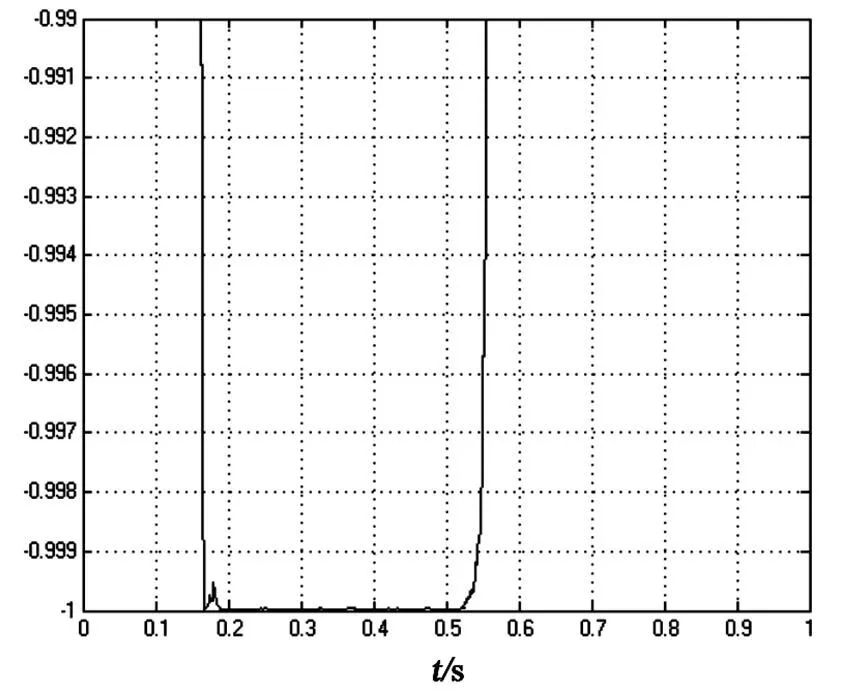
圖23 1.8 MW間歇循環峰值回饋功率時能饋功率因數波形圖
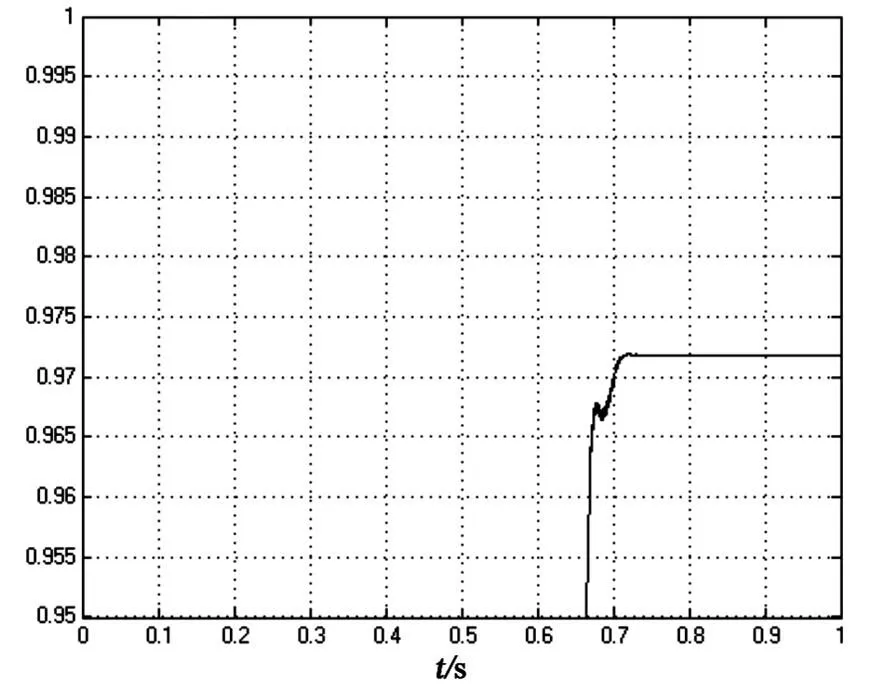
圖24 1.8 MW間歇循環峰值回饋功率時整流功率因數波形圖
2.2.5 諧波分析
圖25、圖26為共用整流變壓器方案1.8 MW間歇循環峰值回饋功率時的AC 35 kV網側電流諧波、電壓諧波分析圖,可以看到在1.8 MW間歇循環峰值回饋功率時,AC 35 kV網側電流諧波畸變率為1.57%,電壓諧波畸變率為0.66%,符合國家標準及項目技術指標。
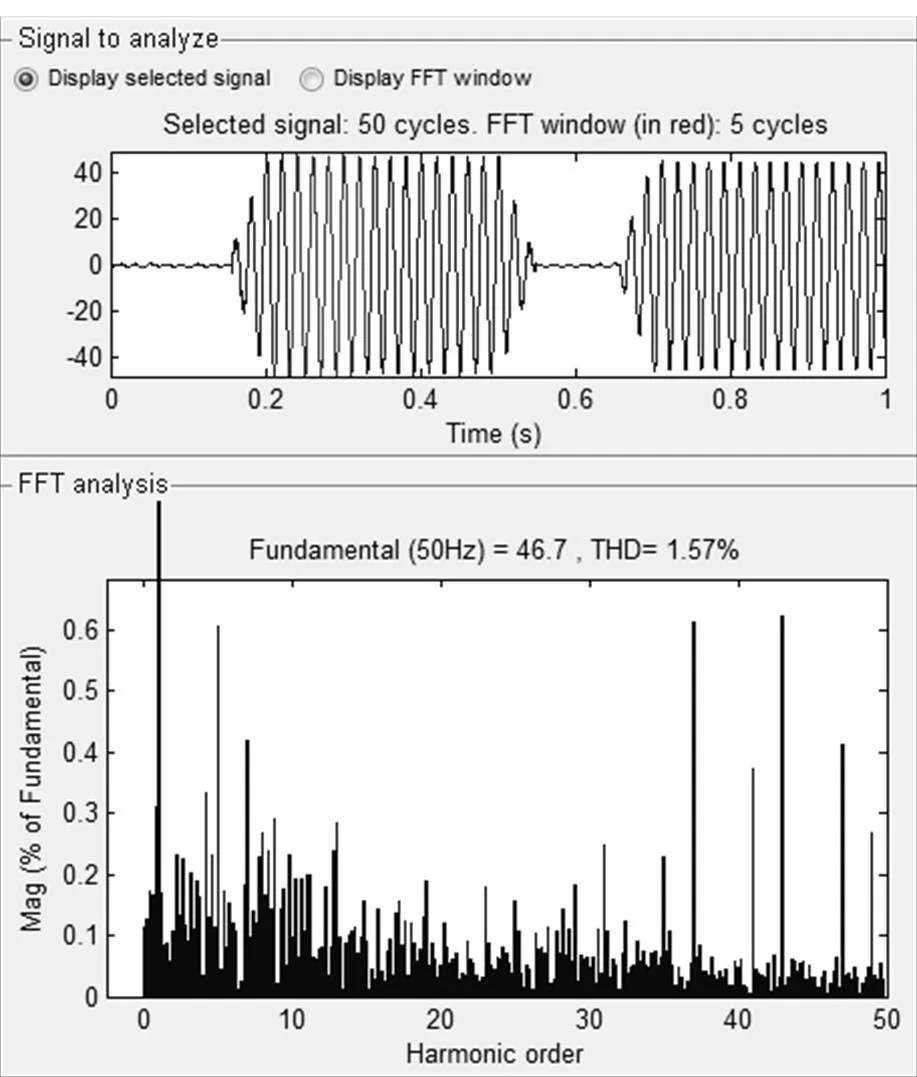
圖25 1.8 MW間歇循環峰值回饋功率時AC 35 kV網側電流諧波圖
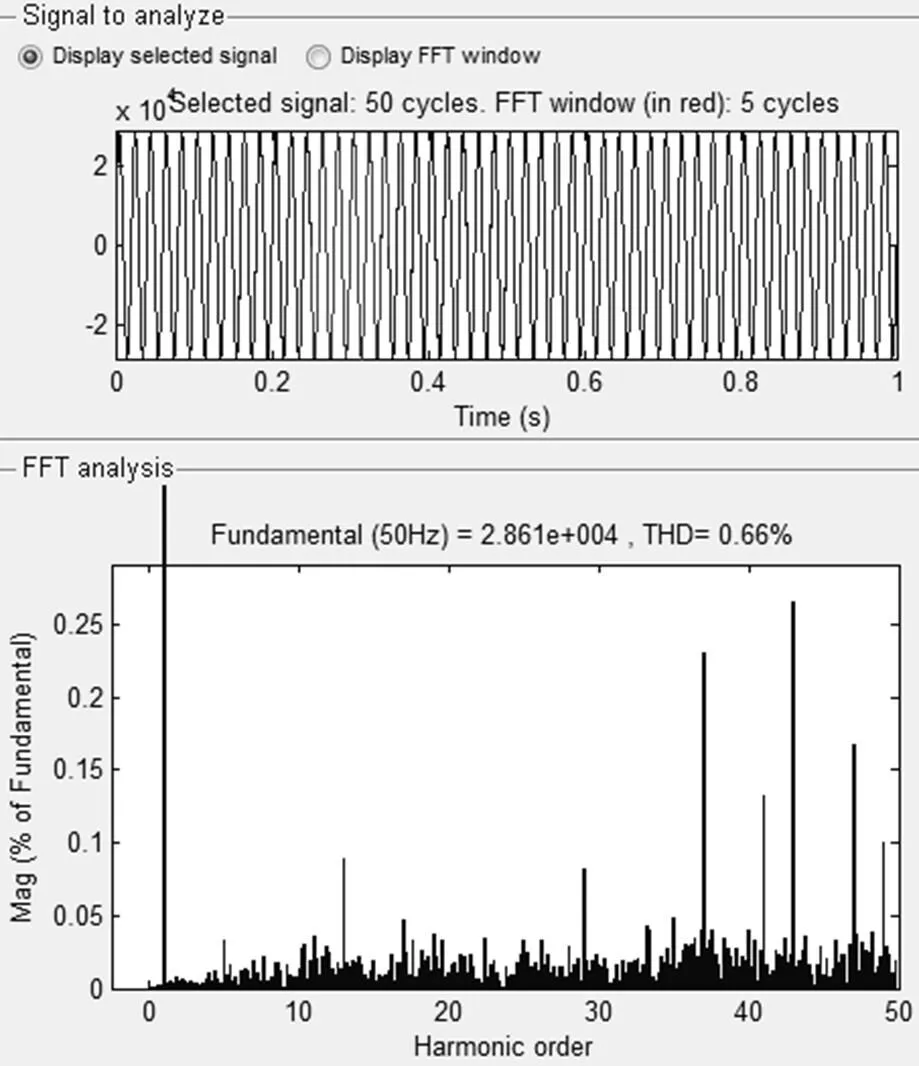
圖26 1.8 MW間歇循環峰值回饋功率時AC 35 kV網側電壓諧波圖
根據國家公用電網諧波標準,35 kV電網電壓、250 MV·A短路容量的AC 35 kV網側電流諧波含量標準及通過仿真計算得到的1.8 MW能饋系統的AC 35 kV網側電流諧波含量如表1所示。由表1可以看出,在1.8 MW間歇循環峰值功率輸出時,能饋系統注入到AC 35 kV電網的網側電流的各次諧波含量均符合國家標準,總諧波含量也符合國家標準。
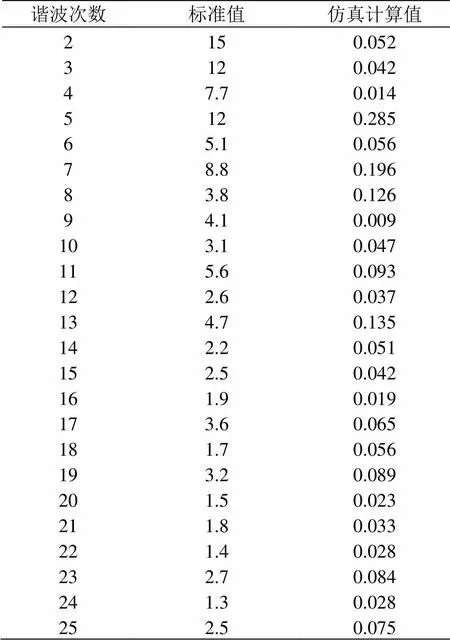
表1 1.8 MW能饋系統AC 35 kV網側電流諧波含量分析表 A
2.2.6 結果分析
從仿真結果可以看出,在共用整流變壓器的能饋系統中,能量回饋裝置工作在間歇循環峰值回饋功率1.8 MW情況下,能饋啟動電壓為1 720 V,回饋電流為1 060 A,能饋過程中直流母線電壓穩定在1 720 V;當列車制動過程結束,二極管整流機組開始工作,直流母線電壓能穩定在1 500 V,電流為-1 200 A左右,輸出2 MW有功功率。在能量回饋過程中,AC 35 kV網側電壓、電流均能保持穩定,功率因數為單位功率因數,AC 35 kV網側電流、電壓諧波率較小,系統的回饋效率達到96%~97%。
3 結語
本文所述方案使能饋型再生制動裝置通過整流變壓器二次側接入供電系統,再生制動能量通過整流變壓器回饋至AC 35 kV中壓網絡。該方案能夠節省土建面積和中壓GIS開關柜;保護方案較獨立,容易設置。同時由仿真結果表明,共用整流變壓器的中壓型能饋系統,在1.8 MW間歇循環峰值回饋功率情況下工作,能可靠穩定地實現能量回饋功能,能饋過程中能很好地維持直流母線電壓穩定,整流直流環流較小,回饋電流質量好,功率因數高,能量回饋效率高,并且不影響二極管整流機組的正常工作。因此本文設計方案滿足地鐵車輛再生制動能量吸收利用及穩定牽引網壓的要求,可以解決實際工程問題。
[1] 陳勇,羅銳鑫. 城市軌道交通再生制動能量吸收方式的研究[J].城市軌道交通研究,2012,(8):157-159.
[2] 葉飛. 城市軌道交通地面制動電阻設置方案[J]. 城市軌道交通研究,2011,(10);75-77.
[3] 張秋瑞,葛寶明,畢大強. 超級電容在地鐵制動能量回收中的應用研究[J]. 電氣化鐵道,2012,(2):40-43.
[4] 徐長勤,宋德銀,董傳海. 城市軌道交通再生制動能量儲存利用[J]. 現代城市軌道交通,2005,(6):18-20.
[5] 林云志,周志宇. 基于DSP的再生制動能量吸收裝置控制器的設計[J]. 電子技術應用,2014,40(3):9-11.
[6] 馬瑜冰,張澤萌,吳越,等. 逆變+電阻混合型再生制動逆變裝置在城市軌道交通中的應用[J].變頻器世界,2014,(11):48-51.
[7] 史麗萍,湯家升,羅明,等. 制動能量吸收裝置的選取及其控制分析[J]. 城市軌道交通研究,2013,(8):92-96.
[8] 楊儉,李發揚,宋瑞剛,等. 城市軌道交通車輛制動能量回收技術現狀及研究進展[J]. 鐵道學報,2011,(2):26-33.
[9] 黃小紅. 城市軌道交通車輛再生制動能量回饋系統PWM整流器容量計算方法[J].城市軌道交通研究,2014,(1):83-85,110.
[10] 陳勇,劉承志,鄭寧,等. 基于逆變回饋的地鐵再生制動能量吸收的研究[J]. 電氣化鐵道,2011,(3):36-39.
[11] 欒桂海,夏猛,蔣海. 城市軌道交通再生制動逆變回饋裝置研究[J]. 變頻器世界,2011,(9):79-82.
[12] 張鐵軍,陳剛,陳雪,等.一種能饋型牽引供電裝置及其控制方法[P]. 湖南:CN102267405A,2011-12-07.
The effective absorption & utilization of regenerative energy of vehicles for urban rail transit is an important subject for development of traction power supply technologies. The paper puts forward a new mode of medium voltage energy feedback system connected with double coil, the inverse feedback device is connected to the power supply system from the double coil at 1 180 V side of rectifying transformer, the braking energy is fed back to 35kV medium voltage network via rectifying transformer to realize energy saving. The paper introduces in details the contents of mathematical models, control strategies and control logics of the system by starting from the scheme design for energy feedback type regenerative braking device. In order to verify the reliability and effectiveness of the scheme, Matlab/Simulink is adopted to set the simulation model to analyze with emphasis in several aspects of voltage waveform of DC bus bar, current waveform of rectifying branch circuit and feedback efficiency of the feedback system as well as the AC side AC 35kV phase voltage, phase current, power factor and harmonics when the scheme of shared rectifying transformer is adopted with the intermittent cyclic peak value of 1.8 MW. The simulation results indicate that the scheme is able to realize the energy feedback function reliably and stably, performance parameters are satisfactory during energy feedback without influences to normal operation of the rectifier sets.
Urban rail transit; double coil connected; medium voltage energy feedback regenerative braking; inversion; feedback; double closed loop control; simulation and modeling
U231.8
A
1007-936X(2017)03-0001-09
2016-09-28
林云志.中鐵電氣化局集團有限公司,教授級高級工程師,電話:010-51872227;羅 金.中鐵電氣化局集團有限公司,工程師。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32