基于FFRLS的質(zhì)心位置修正的ESP控制研究?
2017-10-12 10:36:48張榮蕓陳無(wú)畏時(shí)培成趙林峰
汽車工程 2017年9期
關(guān)鍵詞:汽車
張榮蕓,陳無(wú)畏,時(shí)培成,趙林峰,肖 平
基于FFRLS的質(zhì)心位置修正的ESP控制研究?
張榮蕓1,陳無(wú)畏2,時(shí)培成1,趙林峰2,肖 平1
(1.安徽工程大學(xué)機(jī)械與汽車工程學(xué)院,蕪湖 241000; 2.合肥工業(yè)大學(xué)汽車與交通工程學(xué)院,合肥 230009)
建立了描述汽車橫擺、側(cè)向、縱向、垂向、側(cè)傾和4個(gè)車輪運(yùn)動(dòng)的汽車模型,利用卡爾曼濾波狀態(tài)觀測(cè)器對(duì)前后軸懸架力進(jìn)行估計(jì),采用遺忘因子的遞推最小二乘估算法對(duì)質(zhì)心位置進(jìn)行估計(jì),并用估計(jì)的質(zhì)心位置來(lái)修正參考模型得到的橫擺角速度和質(zhì)心側(cè)偏角的期望值,最后設(shè)計(jì)了ESP系統(tǒng)的參數(shù)自整定模糊PID控制器,并進(jìn)行了仿真和硬件在環(huán)試驗(yàn),結(jié)果表明,考慮質(zhì)心位置變化的ESP控制器的效果比未考慮的控制器好,使汽車在高速轉(zhuǎn)向制動(dòng)行駛時(shí)具有更好的橫向穩(wěn)定性。
汽車;質(zhì)心位置;遺忘因子遞推最小二乘估計(jì);參數(shù)自整定模糊PID控制;穩(wěn)定性控制
Keywords:vehicle; mass center position; forgetting-factor recursive least square; parameter self-tuning fuzzy PID control;stability control
前言
汽車轉(zhuǎn)向行駛時(shí)的橫向穩(wěn)定性非常重要。為使汽車在高速轉(zhuǎn)向時(shí)具有良好的橫向穩(wěn)定性,許多學(xué)者進(jìn)行了大量的研究。文獻(xiàn)[1]中運(yùn)用H∞控制理論設(shè)計(jì)了控制器,通過(guò)對(duì)主動(dòng)懸架執(zhí)行器時(shí)滯和懸掛質(zhì)量變化進(jìn)行控制,使汽車同時(shí)達(dá)到較好的舒適性和操縱穩(wěn)定性;文獻(xiàn)[2]中利用模型預(yù)測(cè)控制方法設(shè)計(jì)了控制器,在考慮電子限滑差速器作用的基礎(chǔ)上,提高了跟蹤期望橫擺角速度和質(zhì)心側(cè)偏角的性能,改善了汽車的橫向穩(wěn)定性。另外,還有學(xué)者通過(guò)對(duì)汽車參數(shù)的估計(jì)來(lái)對(duì)橫向穩(wěn)定性控制進(jìn)行優(yōu)化。例如,有利用實(shí)驗(yàn)數(shù)據(jù)在線運(yùn)用帶有多重遺忘因子的遞推最小二乘法來(lái)估計(jì)汽車的質(zhì)量和路面等級(jí)[3],或利用卡爾曼濾波器來(lái)估計(jì)反饋控制器中的狀態(tài)參數(shù),通過(guò)對(duì)主動(dòng)懸架的控制,以達(dá)到有效改善汽車舒適性和橫向穩(wěn)定性的目的[4-5]。文獻(xiàn)[6]中還對(duì)與汽車操縱特性聯(lián)系緊密的側(cè)偏剛度和側(cè)向速度進(jìn)行了估計(jì),達(dá)到了較好的效果。
綜上所述,目前在對(duì)汽車高速轉(zhuǎn)向行駛中的橫向穩(wěn)定性研究方面,主要通過(guò)對(duì)控制算法的優(yōu)化和汽車相關(guān)參數(shù)的精確估計(jì)來(lái)達(dá)到改善汽車橫向穩(wěn)定性的目的,但仍存在一些不足,主要是在設(shè)計(jì)控制系統(tǒng)參考模型時(shí),均將汽車參數(shù)作不變處理。但實(shí)際行駛工況中,像質(zhì)量、質(zhì)心位置和輪胎側(cè)偏剛度等參數(shù)會(huì)隨工況而變化,這就導(dǎo)致采用固定參數(shù)的參考模型計(jì)算得到的期望值與汽車實(shí)際參數(shù)所對(duì)應(yīng)的期望值存有偏差,會(huì)影響橫向穩(wěn)定性的控制效果。
針對(duì)上面分析得出的不足,本文中首先建立了包括懸架的整車模型;運(yùn)用FFRLS方法完成了對(duì)汽車質(zhì)心到前后軸距離的估計(jì);在該估計(jì)的參數(shù)基礎(chǔ)之上,以2自由度汽車模型為參考模型,設(shè)計(jì)了ESP的參數(shù)自整定模糊PID控制器;仿真和硬件在環(huán)試驗(yàn)驗(yàn)證了該方法的有效性。
1 汽車系統(tǒng)模型
1.1 整車模型
假設(shè)汽車在水平路面上行駛,忽略空氣阻力,建立描述汽車橫擺、側(cè)向、縱向、垂向、側(cè)傾和包括4個(gè)輪胎運(yùn)動(dòng)的汽車模型,對(duì)汽車的轉(zhuǎn)向運(yùn)動(dòng)和側(cè)傾運(yùn)動(dòng)的描述分別如圖1和圖2所示。

圖1 整車轉(zhuǎn)向模型
汽車動(dòng)力學(xué)方程如下,包括縱向、側(cè)向和橫擺運(yùn)動(dòng):


圖2 整車側(cè)傾模型
式中:m和ms為汽車總質(zhì)量和懸掛質(zhì)量;hr為質(zhì)心到側(cè)傾軸的距離;Iz為繞 z軸的轉(zhuǎn)動(dòng)慣量;vx,vy,ωr和φ為汽車的縱向、側(cè)向速度、橫擺角速度和側(cè)傾角;Fx,F(xiàn)y和 Mz為汽車沿x,y軸的合力和關(guān)于z軸的橫擺轉(zhuǎn)矩。
汽車的側(cè)傾運(yùn)動(dòng)方程可表示為

式中:Ix為繞x軸的轉(zhuǎn)動(dòng)慣量;Mx為汽車關(guān)于x軸的側(cè)傾轉(zhuǎn)矩。
∑Fx,∑Fy,∑Mz和∑Mx可具體表示為

式中:B為汽車輪距,假設(shè)前后輪距相等;qf和qr為前、后軸懸架上支點(diǎn)到汽車縱對(duì)稱面的距離(因?qū)ΨQ,左右懸架相同);Fsi為懸架力(i= fl,fr,rl,rr);lf和lr為質(zhì)心到前軸和后軸的距離;δfl和δfr為汽車左前輪和右前輪的轉(zhuǎn)角,假設(shè)左右輪轉(zhuǎn)向角相等。
輪胎的運(yùn)動(dòng)方程為

式中:Iw和ωi為車輪的轉(zhuǎn)動(dòng)慣量和角速度;Ti和Re為驅(qū)動(dòng)或制動(dòng)力矩和車輪有效半徑。
輪胎所受垂直載荷為

式中h為質(zhì)心高度。
車輪中心速度為

車輪的側(cè)偏角為

由此可以推導(dǎo)出每個(gè)輪胎的滑移率為

1.2 整車垂向運(yùn)動(dòng)模型
在研究汽車垂向運(yùn)動(dòng)時(shí),作如下假設(shè):4個(gè)懸架的參數(shù)和路面輸入相同;汽車側(cè)傾較小,縱向速度變化不大。經(jīng)過(guò)簡(jiǎn)化后的垂向運(yùn)動(dòng)如圖3所示。

圖3 整車垂向運(yùn)動(dòng)模型
對(duì)汽車垂向運(yùn)動(dòng)分析后,得懸掛質(zhì)量運(yùn)動(dòng)方程為

式中:zc為質(zhì)心的垂向位移;ψ為汽車俯仰角;Fsf和Fsr為前后軸左右懸架力之和;ms和Iy為汽車的懸掛質(zhì)量和繞y軸的轉(zhuǎn)動(dòng)慣量;hp和ay為質(zhì)心到俯仰中心的距離和汽車的縱向加速度。
非懸掛質(zhì)量運(yùn)動(dòng)方程為

其中

式中:mufj和 murj為前后軸的非懸掛質(zhì)量;zufj和 zurj為前后軸非懸掛質(zhì)量垂向位移;zsfj和zsrj為前后軸懸掛上支點(diǎn)處位移;zfj和zrj為前后軸路面的激勵(lì)輸入;ufj和 urj為前后軸懸掛的力輸入;ksfj,ksrj,csfj和 csrj為前后軸懸掛剛度和阻尼;ktfj和ktrj為前后軸輪胎的剛度。
1.3 輪胎模型
采用“魔術(shù)公式”[7]描述輪胎力與側(cè)偏角和滑移率之間的關(guān)系:

式中各符號(hào)的含義見(jiàn)文獻(xiàn)[7]。其中:d=a1Fz2+a2Fz;b=bcd/cd;e=a6Fz2+a7Fz+a8。 當(dāng)所求為側(cè)向力時(shí),c=1.30,bcd=a3sin(a4arctan(a5Fz));當(dāng)所求為縱向力時(shí),c=1.65,bcd=a3Fz2+a4Fz/ea5Fz。
由于本文中主要研究汽車在高速轉(zhuǎn)向制動(dòng)工況下的橫向穩(wěn)定性問(wèn)題,故輪胎主要是在轉(zhuǎn)向制動(dòng)聯(lián)合工況下工作。根據(jù)“魔術(shù)公式”模型可以求出該聯(lián)合工況下每個(gè)輪胎的側(cè)偏力Fy、縱向力Fx與側(cè)偏角α、滑移率s和相應(yīng)輪胎垂直載荷 Fz之間的關(guān)系為

其中

式中:Fx0和Fy0為利用式(13)所求得的純制動(dòng)工況下的縱向力和純轉(zhuǎn)向工況下的側(cè)向力;輪胎模型中的參數(shù)ai(i=1,…,8)可由實(shí)驗(yàn)數(shù)據(jù)來(lái)確定,所采用的數(shù)值如表1所示。
1.4 路面輸入模型
采用一個(gè)濾波白噪聲作為路面輸入模型:

表1 輪胎模型參數(shù)

式中:G0為路面不平度系數(shù);v為汽車行駛速度;wi為均值為零的高斯白噪聲;f0為下截止頻率;zi為路面位移。
2 基于FFRLS的質(zhì)心位置估計(jì)方法
利用式(10)運(yùn)用FFRLS方法來(lái)進(jìn)行質(zhì)心至前后軸距離lf和lr的動(dòng)態(tài)估計(jì)。式(10)中的俯仰角加速度可通過(guò)陀螺儀測(cè)量得到,縱向加速度也可通過(guò)加速度傳感器或油門(mén)和制動(dòng)踏板行程得到。因此,僅需對(duì)前后懸架力Fsf和Fsr進(jìn)行觀測(cè)。
2.1 基于Kalman濾波的懸架力觀測(cè)器設(shè)計(jì)

式中A,B和F為參數(shù)矩陣,可通過(guò)式(11)、式(12)和式(15)推導(dǎo)出,在此不再列出。
由式(12)可見(jiàn),為觀測(cè)到前后軸對(duì)應(yīng)的懸架力,可選擇系統(tǒng)輸出為y=[,zuf,,zur,zsf,zsr],故其中系統(tǒng)狀態(tài)觀測(cè)矩陣C可表示為

另外,u=[usf,uur,ax]T,w=[wfwr]T,υ(t)為觀測(cè)白噪聲。
將式(16)通過(guò)歐拉積分離散化得到卡爾曼濾波器的系統(tǒng)方程:

假設(shè)w(k)和υ(k)都是零均值的高斯白噪聲,且w(k)和υ(k)相互獨(dú)立,則有

式中:Q(k)為過(guò)程噪聲的協(xié)方差矩陣;R(k)為觀測(cè)噪聲的協(xié)方差矩陣。
假設(shè)系統(tǒng)狀態(tài)初值x(0)與w(k)和υ(k)均不相關(guān),線性離散系統(tǒng)卡爾曼濾波估計(jì)算法的具體推導(dǎo)過(guò)程[8-9]如下。
(1)預(yù)測(cè)估計(jì)

(2)預(yù)測(cè)估計(jì)的誤差協(xié)方差矩陣

(3)卡爾曼濾波增益矩陣

(4)卡爾曼濾波估計(jì)

(5)卡爾曼濾波估計(jì)的誤差協(xié)方差矩陣

式(21)~式(25)構(gòu)成了卡爾曼濾波估計(jì)算法。通過(guò)建立系統(tǒng)初始時(shí)刻的狀態(tài)x(0)和P(0),就可逐步遞推出之后所有時(shí)刻的系統(tǒng)狀態(tài)。在式(17)基礎(chǔ)上應(yīng)用卡爾曼濾波方法可對(duì)zsr進(jìn)行觀測(cè)并運(yùn)用式(12)計(jì)算出前后懸架力估算值F^sf和 F^sr,代入式(10)就可得到質(zhì)心到前后軸的距離估算值 l^f和 l^r(nóng)。
2.2 基于FFRLS的估計(jì)算法與仿真
2.2.1 基于FFRLS的估計(jì)算法
對(duì)質(zhì)心位置估計(jì)的算法流程為:由汽車靜態(tài)下質(zhì)心到前后軸的距離作為初始值,利用式(17)采用卡爾曼濾波的方法建立狀態(tài)觀測(cè)器,對(duì)系統(tǒng)的狀態(tài),z,,z,z,z進(jìn)行觀測(cè),將觀測(cè)得到的狀態(tài)值ufursfsr代入式(12)計(jì)算 F^sf和 F^sr,再將它們和加速度傳感器得到的俯仰角加速度和側(cè)向加速度值代入式(10)中,利用FFRLS方法對(duì)質(zhì)心位置進(jìn)行估計(jì),得到 l^f和 l^r(nóng),最后再將它們代入式(17)中,重復(fù)上述估計(jì)流程就可實(shí)現(xiàn)對(duì)汽車質(zhì)心位置的動(dòng)態(tài)估計(jì)。質(zhì)心位置FFRLS估計(jì)算法的流程圖如圖4所示。

圖4 質(zhì)心位置FFRLS估計(jì)算法的流程圖
駕駛員在駕駛汽車時(shí),會(huì)根據(jù)道路前方情況適時(shí)做出相應(yīng)的加減速操作,使汽車縱向加速度發(fā)生變化。在對(duì)質(zhì)心位置進(jìn)行估計(jì)時(shí),可將縱向加速度的變化看成是一系列疊加在一起的脈沖噪聲所構(gòu)成的干擾信號(hào)。因此,式(10)可改寫(xiě)為

假設(shè)進(jìn)行了N次觀測(cè),可將上式寫(xiě)成矩陣形式:
FFRLS方法的遞推公式[10-11]為

式中:G(N+1)為遞推增益;P(N+1)為協(xié)方差;λ為遺忘因子。λ越小對(duì)新數(shù)據(jù)加權(quán)越重,算法越能更好地跟蹤參數(shù)的變化,但其值過(guò)小又會(huì)增加估計(jì)參數(shù)對(duì)干擾信號(hào)的敏感度,因此,一般在0.95~0.99范圍內(nèi)取值。
2.2.2 質(zhì)心位置估計(jì)的仿真計(jì)算
將FFRLS方法在Matlab/Simulink環(huán)境中進(jìn)行仿真,仿真時(shí)部分參數(shù)見(jiàn)文獻(xiàn)[15]。為驗(yàn)證汽車在加減速行駛時(shí)質(zhì)心位置的變化,仿真在式(15)的平坦路面模型上進(jìn)行,車輪的輪缸壓力變化如圖5所示,在第3與第4s之間進(jìn)行制動(dòng)操作。遺忘因子λ取為 0.97,汽車模型靜態(tài)時(shí)的 lf=1.26,lr=1.70。仿真結(jié)果與卡爾曼濾波方法所得結(jié)果的對(duì)比如圖6和圖7所示。
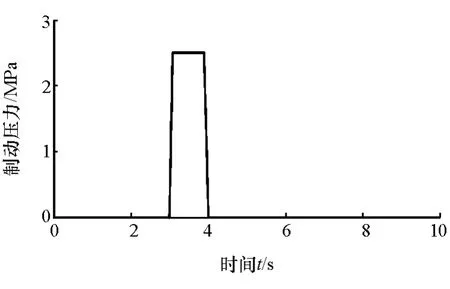
圖5 輪缸制動(dòng)壓力曲線

圖6 lf的估計(jì)值曲線

圖7 lr的估計(jì)值曲線
由圖可見(jiàn),兩種方法對(duì)lf和lr估計(jì)結(jié)果都能與參考值1.26和1.70很好吻合,但卡爾曼估計(jì)對(duì)3到4s時(shí)的制動(dòng)基本上沒(méi)有反應(yīng),說(shuō)明基于FFRLS的方法具有更好的實(shí)時(shí)性,并且在制動(dòng)時(shí)lf值減小,lr值增大符合質(zhì)心前移的客觀事實(shí)。從圖中還可看出,制動(dòng)時(shí)質(zhì)心的前移量能達(dá)到0.1m左右,質(zhì)心轉(zhuǎn)移較大則會(huì)削弱汽車的操縱穩(wěn)定性[12],因此,在研究汽車橫向穩(wěn)定性時(shí),質(zhì)心位置的變化不能忽略。
3 ESP參數(shù)自整定模糊PID控制器設(shè)計(jì)
為便于算法實(shí)現(xiàn)和保證實(shí)時(shí)性,采用計(jì)算量較小、易于微機(jī)實(shí)現(xiàn)的參數(shù)自整定模糊PID控制方法來(lái)設(shè)計(jì)ESP控制器。其設(shè)計(jì)思想是:找出PID 3個(gè)參數(shù)與偏差|e|及其變化率|ec|之間的模糊關(guān)系,通過(guò)測(cè)量計(jì)算|e|和|ec|,實(shí)現(xiàn)對(duì)PID參數(shù)進(jìn)行在線調(diào)整,使被控對(duì)象具有良好的動(dòng)態(tài)性能。
以橫擺角速度和質(zhì)心側(cè)偏角作為汽車ESP控制器的控制參數(shù),在質(zhì)心側(cè)偏角較小時(shí),橫擺角速度能很好反映汽車的行駛穩(wěn)定性,而當(dāng)車輛出現(xiàn)嚴(yán)重甩尾等側(cè)滑現(xiàn)象時(shí),車輛質(zhì)心側(cè)偏角較大且將會(huì)喪失轉(zhuǎn)向能力,這時(shí)橫擺角速度就不能較好表征行駛穩(wěn)定性了。因此,當(dāng)實(shí)際質(zhì)心側(cè)偏角低于其門(mén)限值時(shí),執(zhí)行橫擺角速度控制算法,即以傳感器測(cè)得的實(shí)際橫擺角速度與理想橫擺角速度的偏差絕對(duì)值|eωr|及其變化率絕對(duì)值|ecωr|作為模糊控制器的輸入,將其3個(gè)輸出作為PID控制器的參數(shù),并將PID控制器的輸出通過(guò)制動(dòng)力分配方案作用在相應(yīng)的車輪上,實(shí)現(xiàn)汽車的橫向穩(wěn)定性控制;反之,當(dāng)實(shí)際質(zhì)心側(cè)偏角大于其門(mén)限值時(shí),切換為質(zhì)心側(cè)偏角控制算法。ESP參數(shù)自整定模糊 PID控制系統(tǒng)如圖8所示。

圖8 ESP參數(shù)自整定模糊PID控制系統(tǒng)
期望橫擺角速度和質(zhì)心側(cè)偏角由2自由度模型計(jì)算得到,該2自由度汽車模型中質(zhì)心到前后軸的距離通過(guò)FFRLS方法估計(jì)得到,并考慮了路面附著情況對(duì)期望值的影響,使得到的期望橫擺角速度和質(zhì)心側(cè)偏角的值更加符合實(shí)際情況。期望橫擺角速度和質(zhì)心側(cè)偏角的求解方法見(jiàn)文獻(xiàn)[15],在此不再贅述。其中進(jìn)行橫擺角速度控制所對(duì)應(yīng)的PID控制器為 PID 調(diào)節(jié)器Ⅰ,KpΙ,KiΙ和 KdΙ為其對(duì)應(yīng)參數(shù);質(zhì)心側(cè)偏角控制時(shí)為 PID 調(diào)節(jié)器Ⅱ,KpΙΙ,KiΙΙ和 KdΙΙ為其對(duì)應(yīng)參數(shù)。
在不同的偏差|e|及其變化率|ec|下,對(duì)PID控制器3參數(shù)的自整定規(guī)則總結(jié)如下:
(1)當(dāng)|e|較大時(shí),為具有較好的快速跟蹤性能,應(yīng)取較大的kp和較小的kd;同時(shí)為避免出現(xiàn)較大的超調(diào),一般取ki為零;
(2)當(dāng)|e|中等大小時(shí),為具有較小的超調(diào)和較快的響應(yīng)速度,應(yīng)取較大的kp、適中的ki和kd;
(3)當(dāng)|e|較小時(shí),為具有良好穩(wěn)態(tài)性能和避免在穩(wěn)態(tài)值附近出現(xiàn)振蕩,應(yīng)取較大kp和ki;當(dāng)|ec|較小時(shí),kd一般取中等大小;當(dāng)|ec|較大時(shí),kd應(yīng)取較小值。
對(duì)于橫擺角速度控制算法,取實(shí)際與期望橫擺角速度的偏差絕對(duì)值|eωr|及其變化率絕對(duì)值|ecωr|作為輸入語(yǔ)言變量,每個(gè)語(yǔ)言變量的語(yǔ)言值模糊子集為{小,中,大},記為{S,M,B},且均采用三角隸屬函數(shù)。
對(duì)模糊輸入量,根據(jù)PID 自整定規(guī)則,將|eωr|與|ecωr|進(jìn)行狀態(tài)組合,記每種狀態(tài)的隸屬函數(shù)為μj( |eωr|,|ecωr|),j= 1,…,5。 根據(jù)測(cè)量計(jì)算得到的|eωr|和|ecωr|值計(jì)算 3 個(gè) PID 參數(shù)[13-14]:
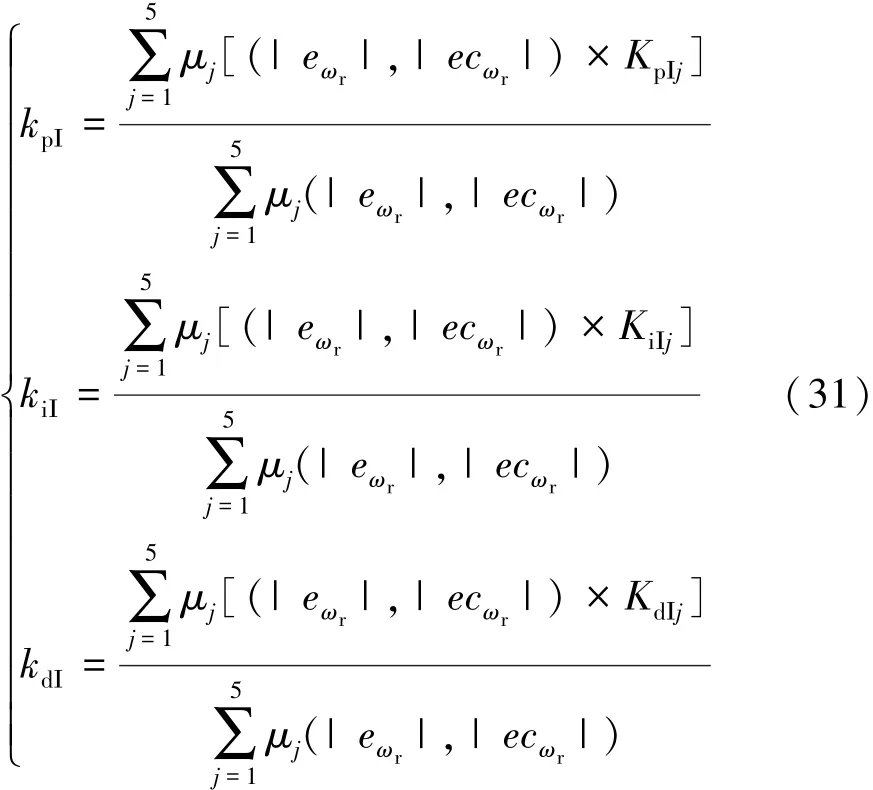
式中 KpΙj,KiΙj和 KdΙj(j= 1,…,5)為參數(shù) kpΙ,kiΙ和 kdΙ在不同狀態(tài)下的加權(quán)。
用在線自整定的 PID 參數(shù) kpΙ,kiΙ和 kdΙ,就可按PID控制算法的離散差分公式計(jì)算輸出控制uωr,即汽車穩(wěn)定所需的附加橫擺力矩:

質(zhì)心側(cè)偏角控制算法推導(dǎo)過(guò)程與橫擺角速度控制算法相同,在此不再贅述。
4 仿真分析
將上述系統(tǒng)在Matlab/Simulink環(huán)境中進(jìn)行仿真,其中部分參數(shù)見(jiàn)文獻(xiàn)[15]。在Matlab/Simulink中建立汽車模型、ESP的參數(shù)自整定模糊PID控制器(圖中記為PID控制)和基于FFRLS質(zhì)心位置估計(jì)的參數(shù)自整定模糊PID控制器(圖中記為修正后PID控制),該控制器能根據(jù)汽車的加減速運(yùn)動(dòng)來(lái)修正質(zhì)心位置。
利用汽車在實(shí)際運(yùn)動(dòng)中容易失穩(wěn)的急劇雙移線工況作為仿真工況,并采用未控制、參數(shù)自整定模糊PID控制和進(jìn)行質(zhì)心位置修正的參數(shù)自整定模糊PID控制3種情況對(duì)比來(lái)驗(yàn)證該控制策略的效果。仿真車速為80km/h、路面附著系數(shù)為0.8高附著路面的仿真結(jié)果如圖9~圖11所示,路面附著系數(shù)為0.3的低附著路面的仿真結(jié)果如圖12~圖14所示。

圖9 高附著路面橫擺角速度仿真曲線

圖10 高附著路面質(zhì)心側(cè)偏角仿真曲線

圖11 高附著路面?zhèn)认蚣铀俣确抡媲€
圖9 和圖10分別為3種情況下高附著系數(shù)路面雙移線工況下橫擺角速度和質(zhì)心側(cè)偏角的對(duì)比曲線。由圖可見(jiàn),在對(duì)質(zhì)心位置未修正與修正之后的PID控制中,橫擺角速度的最大值分別為0.172和0.154rad/s,質(zhì)心側(cè)偏角的最大值分別為0.025和0.023rad,即與未對(duì)質(zhì)心位置進(jìn)行修正相比較,修正后的最大值減小,說(shuō)明考慮質(zhì)心位置變化的參數(shù)自整定模糊PID控制算法具有更好的控制效果。圖11為高附著系數(shù)路面雙移線工況下汽車側(cè)向加速度的對(duì)比曲線。由圖可見(jiàn),未修正與修正后PID控制的最大值分別為3.41和2.83m/s2,即修正后PID控制的側(cè)向加速度比未修正的PID控制有所減小,能明顯減小汽車在高速轉(zhuǎn)向時(shí)出現(xiàn)側(cè)滑以至側(cè)翻等極端失穩(wěn)情況的可能性。通過(guò)上述仿真,說(shuō)明了文中提供的控制算法是有效的,能改善汽車在高附著路面上以較高車速轉(zhuǎn)向時(shí)的橫向穩(wěn)定性。
圖12~圖14分別為3種情況下低附著系數(shù)路面雙移線工況下橫擺角速度、質(zhì)心側(cè)偏角和側(cè)向加速度的對(duì)比曲線。由圖可見(jiàn):在未進(jìn)行汽車穩(wěn)定性控制時(shí),汽車因?yàn)閭?cè)滑而失去了穩(wěn)定;而在對(duì)汽車進(jìn)行控制時(shí),未修正和修正后PID控制所對(duì)應(yīng)的橫擺角速度最大值分別為0.157和0.104rad/s,質(zhì)心側(cè)偏角最大值分別為0.029和0.020rad,側(cè)向加速度最大值分別為2.58和2.19m/s2,即修正后PID控制的曲線最大值比未修正后PID控制的最大值均有所減小,說(shuō)明考慮質(zhì)心位置變化的參數(shù)自整定模糊PID控制算法具有更好的控制效果,能夠有效提高汽車在低附著路面上以較高速轉(zhuǎn)向時(shí)的橫向穩(wěn)定性。

圖12 低附著路面橫擺角速度仿真曲線
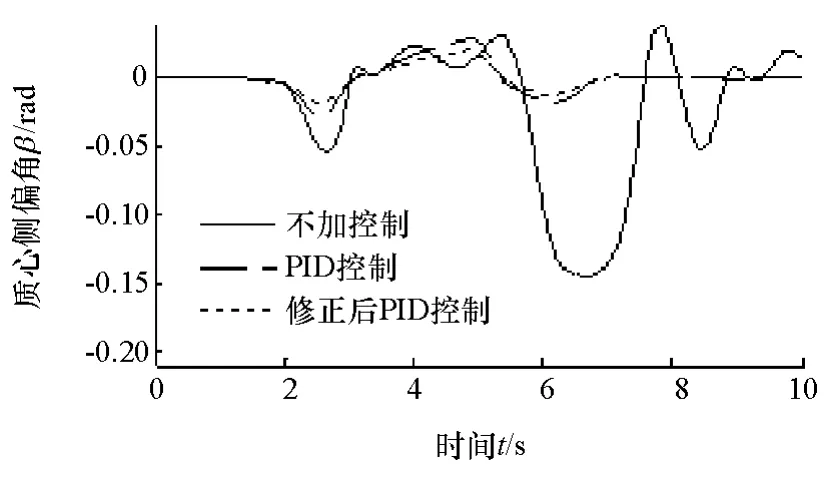
圖13 低附著路面質(zhì)心側(cè)偏角仿真曲線

圖14 低附著路面?zhèn)认蚣铀俣确抡媲€
5 硬件在環(huán)(HIL)試驗(yàn)
為驗(yàn)證本文中提出的ESP控制策略,建立了HIL試驗(yàn)系統(tǒng),如圖15所示。該系統(tǒng)由ESP控制器、實(shí)時(shí)仿真系統(tǒng)、試驗(yàn)用車和接口系統(tǒng)組成。

圖15 HIL仿真試驗(yàn)系統(tǒng)
ESP控制器:硬件部分主要包括電源、輪速信號(hào)采集、ECU芯片、CAN信號(hào)采集、踏板信號(hào)采集、電磁閥和泵電機(jī)驅(qū)動(dòng)等模塊;軟件部分的控制程序通過(guò)代碼快速生成功能得到,在使用時(shí)對(duì)其進(jìn)行了相應(yīng)優(yōu)化。
實(shí)時(shí)仿真系統(tǒng):該系統(tǒng)基于 NI PXI與TESIS DYNAware軟件,利用 TESIS DYNAware軟件中的veDYNA模塊,可建立精確的參數(shù)化車輛模型;NI PXI主機(jī)是一款高性能嵌入式控制器,性能相當(dāng)于3.0GHz Pentium 4系統(tǒng),能使在veDYNA中建立的車輛模型實(shí)時(shí)運(yùn)行,從而構(gòu)成HIL試驗(yàn)系統(tǒng)的實(shí)時(shí)仿真系統(tǒng)。
試驗(yàn)用車:一款裝備有ESP系統(tǒng)的汽車,主要功能是將其液壓系統(tǒng)和各種車載傳感器作為HIL試驗(yàn)系統(tǒng)的硬件系統(tǒng)。
接口系統(tǒng):采用SCB-68接線板,上有高速I(mǎi)/O口,能接受各種傳感器信號(hào),并將其傳輸給實(shí)時(shí)仿真系統(tǒng)中的車輛模型。
HIL試驗(yàn)方案:將開(kāi)發(fā)的ESP控制器安裝到HIL試驗(yàn)系統(tǒng)上,在虛擬試驗(yàn)場(chǎng)中進(jìn)行雙移線試驗(yàn),試驗(yàn)過(guò)程中ESP控制器通過(guò)接口系統(tǒng)接收各種車載傳感器信號(hào)來(lái)判斷汽車運(yùn)行狀態(tài),并根據(jù)相應(yīng)的穩(wěn)定性控制策略來(lái)對(duì)試驗(yàn)車進(jìn)行控制。
試驗(yàn)首先對(duì)質(zhì)心位置估計(jì)算法進(jìn)行了驗(yàn)證,試驗(yàn)在虛擬平坦高附著路面上進(jìn)行,汽車勻速行駛一段時(shí)間,踩下制動(dòng)踏板,穩(wěn)定一段時(shí)間,再迅速松開(kāi)。將采集到的數(shù)據(jù)進(jìn)行處理,得到的估計(jì)結(jié)果如圖16和圖17所示。

圖16 lf的估計(jì)值
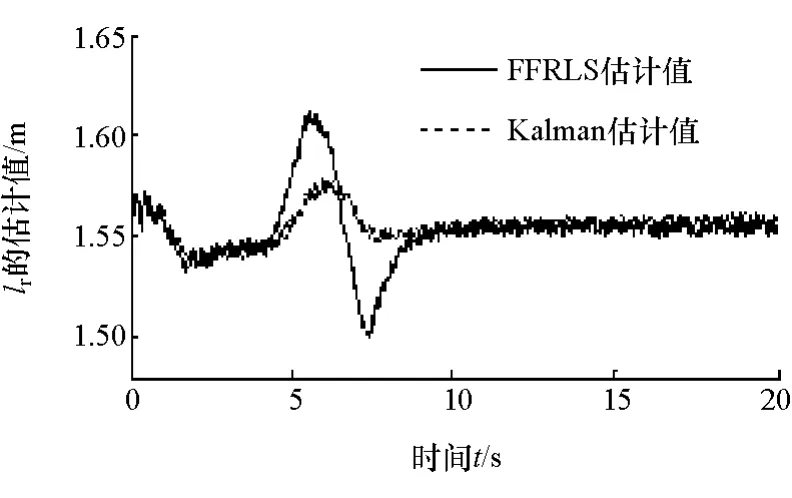
圖17 lr的估計(jì)值
對(duì)穩(wěn)定性控制策略驗(yàn)證試驗(yàn)分為3組:一組為不加控制;另一組為未對(duì)質(zhì)心位置進(jìn)行修正的PID控制;最后一組為對(duì)質(zhì)心位置進(jìn)行修正后的PID控制。
試驗(yàn)在虛擬的平坦路面上進(jìn)行,車速設(shè)定為80km/h,進(jìn)行附著系數(shù)為0.8的高附著路面和附著系數(shù)為0.3的低附著路面上的雙移線試驗(yàn),試驗(yàn)結(jié)果如圖16~圖23所示。
圖16和圖17分別為質(zhì)心位置到前軸和后軸的距離通過(guò)FFRLS和Kalman兩種算法得到的硬件在環(huán)試驗(yàn)估計(jì)值對(duì)比曲線。由圖可見(jiàn),當(dāng)在第4s踩制動(dòng)踏板時(shí),F(xiàn)FRLS和Kalman兩種算法的估計(jì)值由于載荷的前移,使得lf減小,lr增大,這與實(shí)際情況相符,且 FFRLS算法的估計(jì)值變化的更加快速,而Kalman算法的估計(jì)值變化不大,并且變化趨勢(shì)緩慢,因此,硬件在環(huán)試驗(yàn)也說(shuō)明FFRLS算法比Kalman算法具有更好的實(shí)時(shí)性,有助于提高汽車穩(wěn)定性控制的控制性能。
圖18~圖20為高附著路面的試驗(yàn)結(jié)果。由圖可見(jiàn),當(dāng)采用基于質(zhì)心位置修正后的PID控制時(shí),橫擺角速度、質(zhì)心側(cè)偏角和側(cè)向加速度的幅值比未修正的PID控制的幅值要小,說(shuō)明在高速轉(zhuǎn)向過(guò)程中,修正后的PID控制的汽車更能提高汽車的橫向穩(wěn)定性,防止汽車在急速轉(zhuǎn)向時(shí)因失穩(wěn)而產(chǎn)生激轉(zhuǎn)或是偏離跑道。

圖18 高附著路面硬件在環(huán)試驗(yàn)橫擺角速度曲線

圖19 高附著路面硬件在環(huán)試驗(yàn)質(zhì)心側(cè)偏角曲線

圖20 高附著路面硬件在環(huán)試驗(yàn)側(cè)向加速度曲線
圖21 ~圖23為低附著路面的試驗(yàn)結(jié)果。由圖可見(jiàn):未進(jìn)行穩(wěn)定性控制時(shí),汽車同樣失去了橫向穩(wěn)定性,發(fā)生了側(cè)滑而激轉(zhuǎn)的情況;但在對(duì)汽車進(jìn)行穩(wěn)定性控制時(shí),汽車能夠完成雙移線測(cè)試,且基于質(zhì)心估計(jì)的修正后PID控制比PID控制的曲線的幅值要小。說(shuō)明在低附著路面上,本文中提出的穩(wěn)定性控制算法也具有更好的控制效果,使汽車具有較好的橫向穩(wěn)定性。

圖21 低附著路面硬件在環(huán)試驗(yàn)橫擺角速度曲線

圖22 低附著路面硬件在環(huán)試驗(yàn)質(zhì)心側(cè)偏角曲線

圖23 低附著路面硬件在環(huán)試驗(yàn)側(cè)向加速度曲線
質(zhì)心位置的變化使汽車靜態(tài)儲(chǔ)備系數(shù)變化,最終導(dǎo)致汽車穩(wěn)定性變差[16],由于本文算法中考慮了質(zhì)心位置變化,通過(guò)上述硬件在環(huán)試驗(yàn)與仿真計(jì)算進(jìn)行比較也可知,本文中的穩(wěn)定性控制算法在改善汽車行駛中的橫向穩(wěn)定性有較好作用,能使汽車的橫擺角速度、質(zhì)心側(cè)偏角和側(cè)向加速度的幅值得到較為明顯的降低,從而提高其橫向穩(wěn)定性。
6 結(jié)論
(1)本文中建立了考慮汽車縱向、側(cè)向、橫擺和側(cè)傾的汽車模型和汽車垂向運(yùn)動(dòng)模型;利用傳感器測(cè)得的俯仰角加速度和縱向加速度值由卡爾曼濾波方法得到的前后懸架力的估計(jì)值和運(yùn)用FFRLS方法實(shí)現(xiàn)了對(duì)汽車質(zhì)心位置的動(dòng)態(tài)估計(jì)。
(2)在考慮了質(zhì)心位置變化的基礎(chǔ)上,運(yùn)用2自由度模型計(jì)算期望的橫擺角速度和質(zhì)心側(cè)偏角值,采用參數(shù)自整定的模糊PID控制方法設(shè)計(jì)了ESP控制器;最后對(duì)質(zhì)心位置變化的ESP控制方法進(jìn)行了仿真和硬件在環(huán)試驗(yàn),結(jié)果表明該控制方法能改善汽車在轉(zhuǎn)向行駛過(guò)程中的橫向穩(wěn)定性。
[1] NOURISOLA H,AHMADI B.Robust adaptive H controller based on GA-Wavelet-SVM for nonlinear vehicle suspension with time delay actuator[J].Journal of Vibration & Control,2015,22(20).
[2] RUBIN D,AROGETI SA.Vehicle yaw stability control using active limited-slip differential via model predictive control mthods[J].Vehicle System Dynamics:International Journal of Vehicle Mechanics and Mobility,2015,53:1-16.
[3] VAHIDI A,STEFANOPOULOU A,PENGH.Experiments for online estimation of heavy vehicle's mass and time-varying road grade[C].Proceedings of the 2003 ASME International Mechanical Engineering Congress and Exposition,Washington,2003:451-458.
[4] SADATI S H,et al.Optimal control of an 8-DOF vehicle active suspension system using Kalman observer[J].Shock and Vibration,2008,15(5):493-503.
[5] 包瑞新,賈敏,SABBIONI E,等.基于擴(kuò)展Kalman粒子濾波的汽車行駛狀態(tài)和參數(shù)估計(jì)[J].農(nóng)業(yè)機(jī)械學(xué)報(bào),2015,46(2):301-306.
[6] 王其東,黃鶴,陳無(wú)畏,等.基于自適應(yīng)FFRLS的汽車前后軸側(cè)偏剛度估計(jì)[J].機(jī)械工程學(xué)報(bào),2012,48(12):110-117.
[7] PACEJKA H B.Tyre and vehicle dynamics[M].Oxford:Butterworth Heinemann,2002.
[8] 潘立登,潘仰東.系統(tǒng)辨識(shí)與建模[M].北京:化學(xué)工業(yè)出版社,2004.
[9] HAYKIN S.自適應(yīng)濾波器原理(第四版)[M].鄭寶王,等譯.北京:電子工業(yè)出版社,2003.
[10] LJUNG L.System identification-theory for the user[M].Prentice Hall, Englewood Cliffs, NJ,1999.
[11] ZHOU Z.Characteristic parameters identification of characteristic models of linear time invariant systems[J].Journal of Systems Science & Mathematical Sciences,2010,30(30):6133-6138.
[12] 付江華,巢凱年,丁建明.質(zhì)心轉(zhuǎn)移對(duì)四輪轉(zhuǎn)向汽車轉(zhuǎn)向特性的影響[J].西華大學(xué)學(xué)報(bào),2007,26(4):17-19.
[13] 章衛(wèi)國(guó),楊向東.模糊控制理論與應(yīng)用[M].西安:西北工業(yè)大學(xué)出版社,1999.
[14] 曾光奇.模糊控制理論與工程應(yīng)用[M].武漢:華中科技大學(xué)出版社,2006.
[15] 陳無(wú)畏,張榮蕓,趙林峰,等.運(yùn)用Lyapunov指數(shù)方法的車輛橫向運(yùn)動(dòng)混沌分析及其滑模變結(jié)構(gòu)控制[J].中國(guó)科學(xué):技術(shù)科學(xué),2014(9):979-990.
[16] 余志生.汽車?yán)碚揫M].北京:機(jī)械工業(yè)出版社,2009.
A Research on ESP Control with Mass Center Position Correction Using FFRLSMethod
Zhang Rongyun1, Chen Wuwei2, Shi Peicheng1, Zhao Linfeng2& Xiao Ping1
1.The School of Mechanical and Automotive Engineering, Anhui Polytechnic University, Wuhu 241000;2.The School of Automotive and Traffic Engineering, Hefei University of Technology, Hefei 230009
A vehicle model describing its longitudinal, lateral, vertical, yaw and roll motion as well as the rotation of four wheels is established.Kalman filter state observer is used to estimate the suspension forces of front and rear axles and forgetting-factor recursive least square(FFRLS)method is utilized to estimate the position of mass center,which is then used to correct the desired values of yaw rate and the sideslip angle of mass center obtained from reference model.Finally the parameter self-tuning fuzzy PID controller of ESP system is designed,and both simulation and hardware-in-the loop test are carried out.The results show that the control effects of ESP controller considering the change of mass center position is better than that without consideration,leading to better lateral stability during high-speed steering and braking of vehicle.
10.19562/j.chinasae.qcgc.2017.09.012
?國(guó)家自然科學(xué)基金(51605003,51375131和51575001)、國(guó)家自然科學(xué)基金汽車聯(lián)合基金(U1564201)和安徽工程大學(xué)引進(jìn)人才科研啟動(dòng)基金(2016YQQ002)資助。
原稿收到日期為2016年7月12日,修改稿收到日期為2016年10月23日。
張榮蕓,講師,博士,E-mail:hanfengzhiwei@163.com。
猜你喜歡
人民交通(2020年22期)2020-11-26 07:36:44
小學(xué)生優(yōu)秀作文(低年級(jí))(2020年4期)2020-07-24 08:31:08
汽車與安全(2019年9期)2019-11-22 09:48:03
汽車與安全(2019年8期)2019-09-26 04:49:10
汽車與安全(2019年5期)2019-07-30 02:49:51
汽車觀察(2019年2期)2019-03-15 06:00:06
汽車與新動(dòng)力(2018年2期)2018-05-09 00:31:56
兒童時(shí)代·快樂(lè)苗苗(2017年7期)2018-01-24 18:28:45
作文大王·低年級(jí)(2016年4期)2016-04-18 00:24:37
決策探索(2014年21期)2014-11-25 12:29:50
