轎車主動懸架系統級聯式控制策略研究
2017-10-11 07:06:30郭超劉丹丹
汽車零部件 2017年9期
郭超,劉丹丹
(運城職業技術學院,山西運城 044000)
轎車主動懸架系統級聯式控制策略研究
郭超,劉丹丹
(運城職業技術學院,山西運城 044000)
對主動懸架系統控制策略進行深入研究,相比傳統主動懸架模糊PID控制策略,最優控制與滑模控制級聯控制策略有更好的控制效果。研究結果對于提高轎車主動懸架控制性能具有一定的實用價值。
主動懸架;滑模控制;級聯控制策略
0 引言
車輛的運行工況一般比較復雜,因此車輛對懸架系統的性能需求也比較多。人們希望懸架系統可以緩和路面沖擊,衰減車身振動,所以需要懸架系統有較小的懸架剛度。但是懸架系統的剛度還需要同時滿足車輛對于操縱穩定性的需求,傳統的懸架系統設計過程中只能選擇折中方案,因此無法將操縱穩定性和平順性同時做到最好。被動懸架不能自主地根據外界車輛運行工況和外界干擾改變性能參數。為了改變被動懸架的這種缺陷,人們提出多種改善車輛懸架系統的方案,主動懸架是一種提升懸架性能的有效方法[1]。
1 級聯式控制策略的原理和優勢
1.1 級聯式控制的基本原理
級聯式控制策略是指將一個復雜的控制對象模型根據其結構特點,將它分解為多個層次的簡單模型,如頂層模型和底層模型、內環模型和外環模型等,然后根據簡單模型的特點分別使用不同的控制策略進行控制,從而實現對復雜對象模型的最優控制。級聯式控制策略主要針對包含線性、非線性、時變、定常等環節的較復雜的控制對象,見圖1。
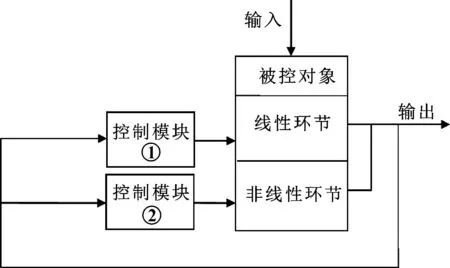
圖1 級聯式控制方法
1.2 級聯式控制優點
級聯式控制策略的優勢在于能夠簡化研究對象模型,將其分解為簡單的控制問題,并可以選擇合適的控制策略對分解后的控制模型進行控制,從而發揮各個控制方法的優點,避免其劣勢,因此級聯式控制策略在整體研究對象層面上能實現更好的控制性能[2],詳見表1。

表1 常見控制算法的優缺點
2 級聯式控制策略模型
2.1 級聯式控制策略模型建立


(1)
設計滑模控制律為:

[-(β/μ)x5-αS(x2-x4)+γx6w0]}
(2)
將式(2)代入式(1)中,得:
(3)


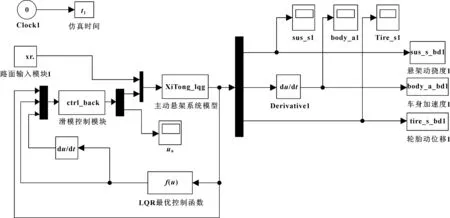
圖2 主動懸架最優控制與滑模控制級聯控制仿真模型
2.2 仿真隨機路面輸入模型
車輛行駛的路面通常可以用路面不平度函數來表示。路表面相對于基準面的距離為q,順著路面走向方向長度I的變動q(I)稱作路面不平度函數。在對不平度進行測繪時,通常使用水準儀或者專業的路面計來獲得道路表面縱向截面上的q(I)值。通過大量測量得到路面q(I)值的隨機性數據,使用計算機進行統計分析處理,可以得出路面不平度的功率譜密度函數Gq(n)或σq2等統計學特征參數,見圖3。
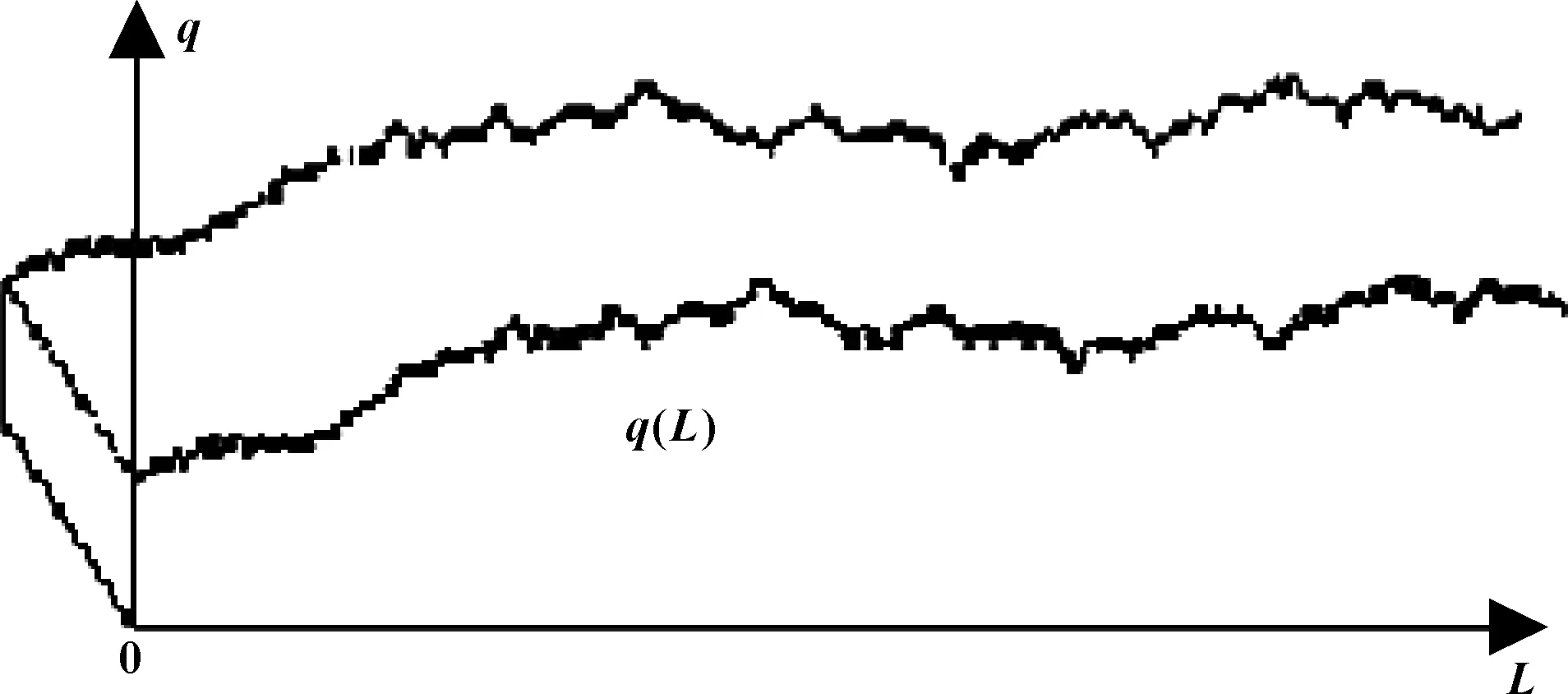
圖3 路面的縱向截面走勢曲線圖
3 模糊PID控制和級聯式控制策略仿真結果對比分析
為了充分研究兩種控制策略的控制效果,將懸架各個性能指標進行對比,可以得到簡單顛簸路面輸入下主動懸架的各項性能響應對比分別如圖4—6所示。

圖4 懸架系統車身加速度響應對比圖

圖5 懸架系統懸架動撓度響應對比圖

圖6 懸架系統輪胎動位移響應對比圖
4 結束語
從仿真結果可以看出:簡單顛簸路面上,最優滑模級聯式控制策略不僅使得車身加速度峰值降低30%,還使系統的調節速度更快,超調量更小,魯棒性能更高;懸架動撓度和輪胎動位移峰值在兩種路面上都下降了20%以上。最優滑模級聯控制采用車身加速度、懸架動撓度、輪胎動位移等多個變量作為反饋,可以調節各個性能指標的權值,從而得到不同工況的最優控制效果。最優滑模級聯式控制策略可以使用需求狀態量較少的輸出調節最優控制代替狀態調節最優控制,減少傳感器數量,降低成本[4]。綜上所述,最優滑模級聯控制策略的效果要優于模糊PID控制策略,綜合懸架的各項性能指標。
[1]王國麗,顧亮,孫逢春.車輛主動懸架技術的現狀和發展趨勢[J].兵工學報,2000,21(S1):80-83. WANG G L,GU L,SUN F C.Current Status and Tendency of Development in Vehicle Active Suspension[J].ACTA Armamentarii,2000,21(S1):80-83.
[2]陳翔,張林燕.汽車可控懸架及其控制策略的研究動態[J].公路與汽運,2005(1):3-5.
[3]寇發榮,方宗德.汽車可控懸架系統的研究進展[J].汽車工程,2007,29(5):426-432. KOU F R,FANG Z D.The Research Trend in Controlled Suspension System of Vehicles[J].Automotive Engineering,2007,29(5):426-432.
[4]寇發榮.車輛電動靜液壓主動懸架系統的設計與試驗研究[J].機械傳動,2009,33(4):86-89,138. KOU F R.Design and Experiment of Vehicle Active Suspension with Electro-hydrostatic Actuator[J].Journal of Mechanical Transmission,2009,33(4):86-89,138.
ResearchonCascadeControlStrategyforAutomobileActiveSuspensionSystem
GUO Chao, LIU Dandan
(Yuncheng Polytechnic College,Yuncheng Shanxi 044000,China)
The control strategy for active suspension system was studied deeply. Compared with traditional active suspension fuzzy PID control strategy, the optimal control and slide control cascade control strategy had better control effect. The research results have certain practical value for improving the control performance of vehicle active suspension.
Active suspension;Sliding mode control; Cascading control strategy
U463.33
A
1674-1986(2017)09-061-03
10.19466/j.cnki.1674-1986.2017.09.015
2017-05-24
郭超(1987—),男,碩士, 高級技師,研究方向為汽車檢修。E-mail:345829320@qq.com。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
能源工程(2020年6期)2021-01-26 00:55:22
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
家庭影院技術(2017年9期)2017-09-26 03:41:45