基于MATLAB的某越野車懸架系統參數計算與仿真分析研究
2017-10-11 07:06:21王紅鋼徐磊周喻陳曉
汽車零部件 2017年9期
王紅鋼,徐磊,周喻,陳曉
(1.中國汽車工程研究院股份有限公司,重慶 401122;2.重慶長安工業(集團)有限公司,重慶 401120)
基于MATLAB的某越野車懸架系統參數計算與仿真分析研究
王紅鋼1,徐磊1,周喻2,陳曉1
(1.中國汽車工程研究院股份有限公司,重慶 401122;2.重慶長安工業(集團)有限公司,重慶 401120)
根據車輛參數進行懸架系統受力分析,得到螺旋彈簧所受壓縮力;然后結合懸架系統關鍵參數計算公式和MATLAB/Guide模塊,完成GUI界面創建和回調函數程序編寫,運行得到剛度、阻尼系數和偏頻等參數;最后借助Simulink建立1/2車輛五自由度動力學模型,從車輛垂直振動加速度、懸架動擾度和車輪動載荷3個方面對懸架系統進行仿真分析。引入MATLAB實現了多軸越野車懸架系統參數計算和仿真分析程序化、模塊化,對提高設計效率和懸架系統性能分析具有重要意義。
越野車;懸架系統;參數計算;仿真分析
0 引言
多軸越野車具有整車質量大、離地間隙高和行駛路況復雜等特點,因此,設計安全可靠的懸架系統對于多軸越野車具有重要意義。螺旋彈簧為彈性元件、雙筒式液壓減振器為阻尼元件、不等長叉臂為導向和傳力機構的獨立懸架是高機動越野車懸架系統的首選。在懸架系統的設計過程中,存在螺旋彈簧和減振器設計計算復雜、懸架系統整車性能匹配分析困難。MATLAB集科學計算、程序編寫(Editor)、可視化(Guide)和仿真(Simulink)于一體,對懸架系統參數計算和仿真分析具有快速、準確的特點。作者借助MATLAB工具完成某6×6越野車懸架系統螺旋彈簧、減振器、懸架的參數計算,并對整車行駛性能進行仿真分析。
1 懸架參數計算
某6×6越野車質量為15 776 kg,一橋軸荷為5 008.5×9.8 N,二橋軸荷為5 160×9.8 N,三橋軸荷為5 292.9×9.8 N。將雙橫臂懸架簡化為四連桿機構,如圖1所示。
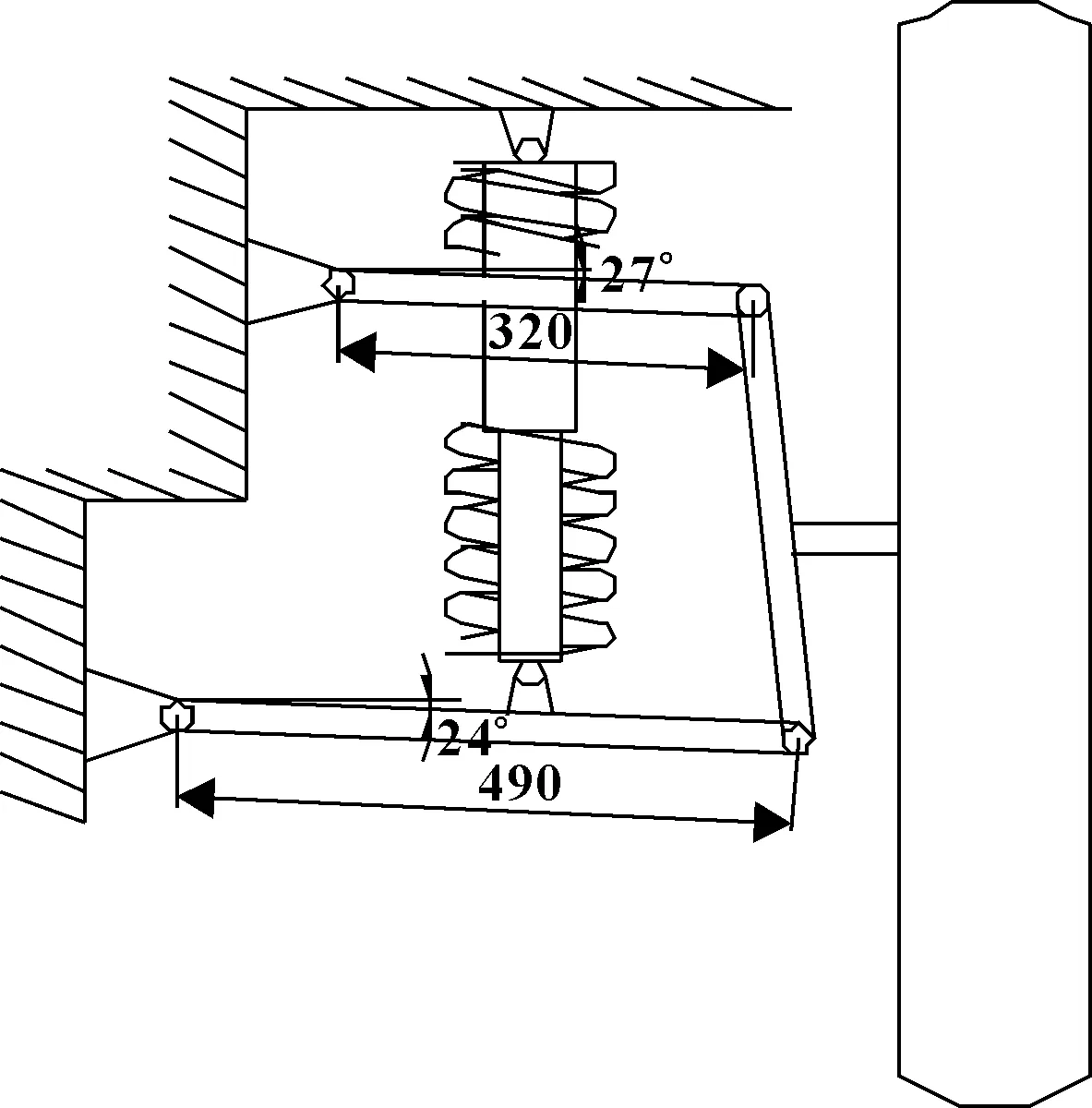
圖1 雙橫臂式獨立懸架簡圖
對圖1所示機構簡圖進行受力分析,可分別得到各橋螺旋彈簧所受壓力的大小:一橋為FS1=21 325 N;二橋為FS2=21 876 N;三橋為FS3=22 496 N。結合越野車行駛情況和車輛布置,考慮選取彈簧行程為s=±70 mm,自由高度H0=520 mm。螺旋彈簧材料選擇60Si2CrVA彈簧鋼,其許用應力為σb=1 863 MPa,彈性模量G=80 000 N/mm2。
MATLAB/GUI可根據設計要求創建GUI應用程序,并且自動生成M文件框架,用戶根據M文件框架編制應用程序。根據參數輸入輸出要求,完成GUI界面布局見圖2。
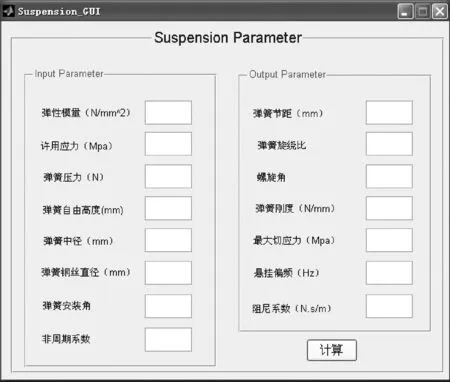
圖2 GUI界面布局
運行圖2所示的GUI界面,可得一橋彈簧剛度k1=3×105N/m,阻尼系數c1=3.5×104N·s/m;二橋彈簧剛度k2=3.1×105N/m, 阻尼系數c2=3.65×104N·s/m;三橋彈簧剛度k3=3.2×105N/m,阻尼系數c1=3.71×104N·s/m。
2 整車仿真分析
越野車輛懸架要求保證車輛具有良好的行駛平順性和穩定的輪胎動擾度,因此,基于MATLAB/Simulink建立1/2車輛五自由度模型,從車輛垂直振動加速度、懸架動擾度和車輪動載荷3個方面對懸架系統進行仿真分析。

表1 動力學模型參數表
2.1 路面白噪聲模型
路面不平度模型隨路面等級和車輛行駛速度變化而變化,且后輪不平度模型相對于前輪不平度模型存在延時效應。依據Laplace變換及傳遞函數qf、qm和qr,推導路面模型為:
(1)
式中:δ為由空間頻率和路面等級決定的常值;v為汽車的行駛速度;w(t)為零均值白噪聲隨機信號,其強度T=2δvρ2;qf、qm、qr分別為一橋、二橋和三橋的路面激勵位移。
鑒于越野車輛路面情況惡劣,擬選擇D級路面譜作為激勵,將參數帶入路面模型,借助Simulink搭建三軸車輛路面仿真模型,如圖3所示。
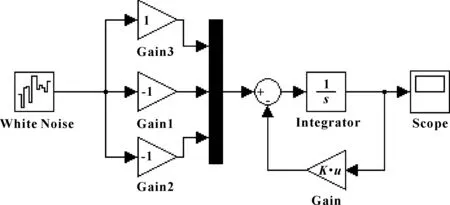
圖3 路面激勵的Simulink模型
運行圖3所示的路面激勵模型,可得各輪胎路面激勵譜,見圖4。
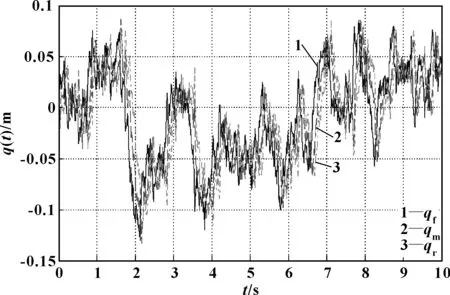
圖4 各輪胎路面譜曲線
2.2 車輛仿真分析
文中主要研究越野車車身的垂直振動特性和俯仰特性,因此建立1/2車輛五自由度模型,見圖5。
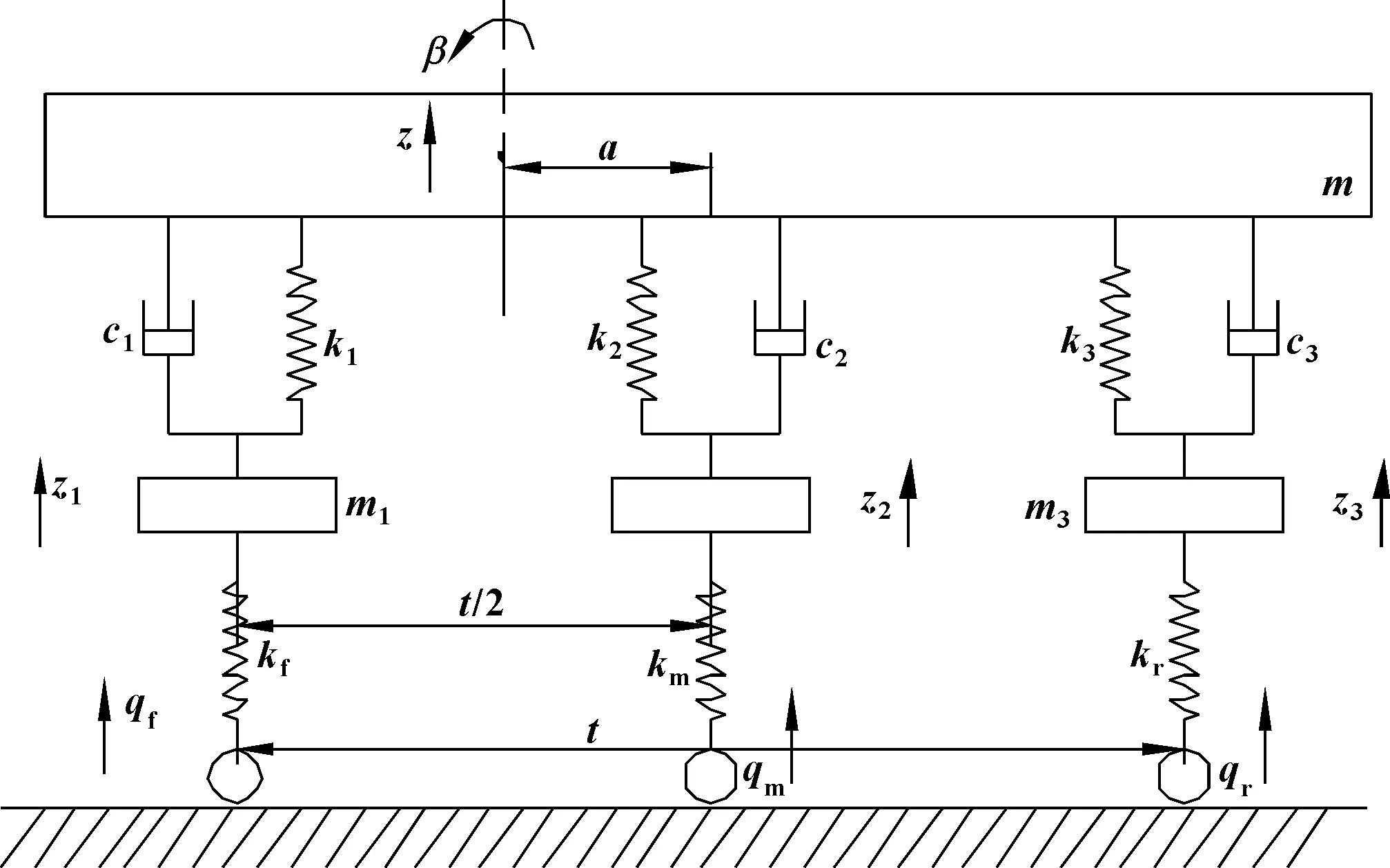
圖5 1/2車輛五自由度模型
根據圖5所示的越野車模型,可得到下式:
公司將秉承“礦業報國,振興民族經濟”的核心價值觀努力發展,將成為世界500強的國際化大型礦業資源跨國公司作為企業目標。

(2)

(3)

(4)

(5)

kr(z3-qr)=0
(6)
將動力學方程寫成矩陣形式為:

U=[0 0qfqmqr]T;M=diag[mJm1m2m3]
則可以將上式表示為:

(7)
基于1/2車輛五自由度動力學模型和Simulink模塊建立1/2車輛仿真模型,見圖6。
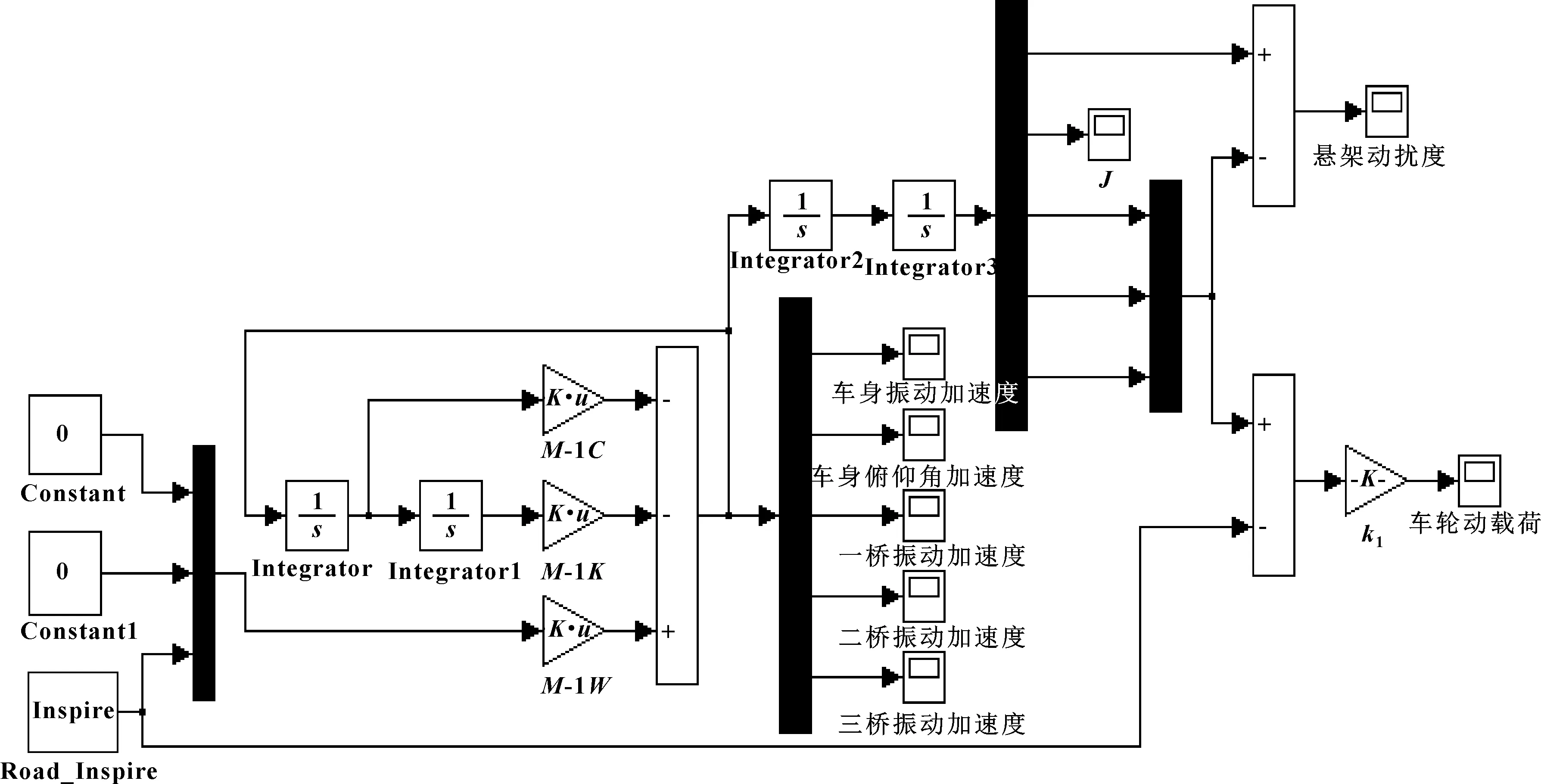
圖6 1/2車輛Simulink仿真模型
將表1中的參數帶入Simulink中,可分別得到車身垂直振動加速度、懸架動擾度和車輪動載荷,見圖7。
由圖7所示:車身最大垂直振動加速度amax<6 m/s2,符合越野車輛D級路面車身振動要求;一橋和二橋懸架動行程Zdi

圖7 車身加速度、懸架動行程、車輪動載荷時間歷程
3 結論
引入MATLAB軟件進行懸架參數計算和仿真分析,對于推進懸架系統設計程序化、模塊化、集成化具有重要意義。
(1)借助GUI界面實現了懸架參數可視化和程序化計算,能有效提高懸架設計效率。
(2)建立了多軸越野車輛1/2車輛五自由度動力學模型,為研究越野車輛振動特性提供理論基礎。
(3)通過搭建Simulink仿真模型,對車輛垂直振動加速度、懸架動擾度和車輪動載荷3個方面進行仿真分析,驗證了懸架系統關鍵參數的合理性。
[1]張英會,劉輝航,王德成,等.彈簧設計手冊[M].北京:機械工業出版社,2006.
[2]袁涌,蔡靜.Matlab/GUI在鋼板彈簧懸架設計中的應用[J].湖北汽車工業學院學報,2011,25(2):16-19. YUAN Y,CAI J.Application of Matlab/GUI in Leaf Spring Suspension Design[J].Journal of Hubei Automotive Industries Institute,2011,25(2):16-19.
[3]彭佳,何杰,李旭宏,等.路面不平度隨機激勵時域模型的仿真比較與評價[J].解放軍理工大學學報(自然科學版),2009,10(1):78-82. PENG J,HE J,LI X H,et al.Simulation Comparison and Evaluation of Common Time Domain Models under Road Irregularity Excitation[J].Journal of PLA University of Science and Technology(Natural Science Edition),2009,10(1):78-82.
[4]于英.多軸越野車輛油氣懸架系統參數仿真[J].農業機械學報,2005,36(11):25-28. YU Y.Parametric Simulation of Multiaxile Off-road Vehicle with Hydro-pneumatic Suspension[J].Transactions of the Chinese Society of Agricultural Machinery,2005,36(11):25-28.
[5]吳龍,聞霞.6自由度半車懸架解耦及其分層振動控制的研究[J].汽車工程,2010,32(2):148-154. WU L,WEN X.A Research on the Decoupling of 6 DOF Half Vehicle Suspension and Its Hierarchical Vibration Control[J].Automotive Engineering,2010,32(2):148-154.
ResearchonParametersCalculationandSimulationAnalysisoftheSuspensionSystemofaCertainWheeledArmoredVehicleBasedonMATLAB
WANG Honggang1,XU Lei1,ZHOU Yu2,CHEN Xiao1
(1.China Automotive Engineering Research Institute Co., Ltd., Chongqing 401122, China;2.Chongqing Chang’an Industry(Group) Co., Ltd., Chongqing 401120,China)
The compressive strength of the spiral spring was gotten through force analysis of the suspension system based on the parameters of the vehicle.The interface of the Guide was established and the callback function procedure was compiled combining with computational formula of the key parameter of the suspension system and MATLAB/Guide module,and the parameters of the stiffness, damping coefficient and deviation frequency were gotten.Then,the 5-DOF dynamical model of the 1/2 vehicle was established through Simulink,the simulation analysis was carried out on the suspension system from three aspects including the vertical vibration acceleration, suspension dynamic vehicle immunity and wheel dynamic load. The introduction of MATLAB achieved programmed and modularization for the parameter calculation and simulated analysis of the suspension system of multi-axle wheeled armored vehicle;meanwhile, it’s of great significance on improving the design efficiency and performance analysis of the suspension system.
Wheeled armored vehicle; Suspension system;Parameter calculation;Simulated analysis.
TTJ81
A
1674-1986(2017)09-033-04
10.19466/j.cnki.1674-1986.2017.09.007
2017-08-21
王紅鋼(1984—),男,研究生,工程師,研究方向為整車測試評價。E-mail:xuleijy@126.com。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
科學大眾(2023年17期)2023-10-26 07:39:14
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
天天愛科學(2020年6期)2020-09-10 07:22:44
數學物理學報(2020年2期)2020-06-02 11:29:24
電子制作(2018年18期)2018-11-14 01:48:24
數學物理學報(2017年6期)2018-01-22 02:26:40
山東工業技術(2016年15期)2016-12-01 05:31:22
光學精密工程(2016年6期)2016-11-07 09:07:19