基于單軸陀螺儀和伺服電機的交通繪制機器人在生產生活中的應用
2017-10-10 08:43:56李敖
未來英才 2017年16期
李敖
摘要:本文以研究機器人的路徑規劃為主要目標,研究一種基于單軸陀螺儀和伺服電機的路徑規劃機器人在交通領域中的應用技術。陀螺儀能提供實時角度信號,再結合伺服電機精確控制機器人的移動和動作,對機器人進行路徑規劃,并在生產生活中得到應用。目前生活中的很多領域涉及到路徑規劃的運用,如智能農機、保安機器人、家庭吸塵器等。
關鍵詞:機器人;路徑規劃;伺服電機;陀螺儀;交通標識
本文提出的基于單軸陀螺儀和伺服電機的路徑規劃機器人在交通領域具有廣泛應用前景,通過此機器人從事斑馬線、行轉標志、警戒線等交通標識的繪制工作具有可行性。
一、單軸陀螺儀
陀螺儀(gyroscope)是指敏感角速率和角偏差的一種傳感器,其原理為角動量不滅的理論。陀螺儀主要是由一個位于軸心可以旋轉的輪子構成,在動態中能保持相對跟蹤狀態。陀螺儀一旦開始旋轉,由于輪子的角動量,陀螺儀有抗拒方向改變的趨向,能夠用來感測與維持方向。所以陀螺儀常用作信號傳感器,用于導航、定位等系統。
如圖所示,軸的底部被托住靜止但是能夠各個方向旋轉。當一個傾斜力作用在頂部的軸上的時候,質點A向上運動,質點C則向下運動,如其中的子圖2。因為陀螺儀是順時針旋轉,在旋轉90度角之后,質點A將會到達質點B的位置。CD兩個質點的情況也是一樣的。子圖2中質點A當處于如圖的90度位置的時候會繼續向上運動,質點C也繼續向下。AC質點的組合將導致軸在子圖3所示的運動平面內運動。一個陀螺儀的軸在一個合適的角度上旋轉,在這種情況下,如果陀螺儀逆時針旋轉,軸將會在運動平面上向左運動。如果在順時針的情況中,傾斜力是一個推力而不是拉力的話,運動將會向左發生。在子圖4中,當陀螺儀旋轉了另一個90度的時候,質點C在質點A受力之前的位置。C質點的向下運動現在受到了傾斜力的阻礙并且軸不能在傾斜力平面上運動。傾斜力推軸的力量越大,當邊緣旋轉大約180度時,另一側的邊緣推動軸向回運動。
實際上,軸在這個情況下將會在傾斜力的平面上旋轉。軸之所以會旋轉是因為質點AC在向上和向下運動的一些能量用盡導致軸在運動平面內運動。當質點AC最后旋轉到大致上相反的位置上時,傾斜力比向上和向下的阻礙運動的力要大。
高速旋轉的物體的旋轉軸,對于改變其方向的外力作用有趨向于垂直方向的傾向。而且,旋轉物體在橫向傾斜時,重力會向增加傾斜的方向作用,而軸則向垂直方向運動,就產生了搖頭的運動(歲差運動)。當陀螺經緯儀的陀螺旋轉軸以水平軸旋轉時,由于地球的旋轉而受到鉛直方向旋轉力,陀螺的旋轉體向水平面內的子午線方向產生歲差運動。當軸平行于子午線而靜止時可加以應用。
1、伺服電機。伺服電機(servo motor)是指在伺服系統中控制機械元件運轉的發動機,是一種補助馬達間接變速裝置。伺服電機可使控制速度,位置精度非常準確,可以將電壓信號轉化為轉矩和轉速以驅動控制對象。
伺服主要靠脈沖來定位,伺服電機接收到1個脈沖,就會旋轉1個脈沖對應的角度,從而實現位移。因伺服電機本身具備發出脈沖的功能,所以伺服電機每旋轉一個角度,都會發出對應數量的脈沖,這樣,和伺服電機接受的脈沖形成了呼應,或者叫閉環,如此一來,系統就會知道發了多少脈沖給伺服電機,同時又收了多少脈沖回來,這樣,就能夠很精確的控制電機的轉動,從而實現精確的定位,可以達到0.001mm。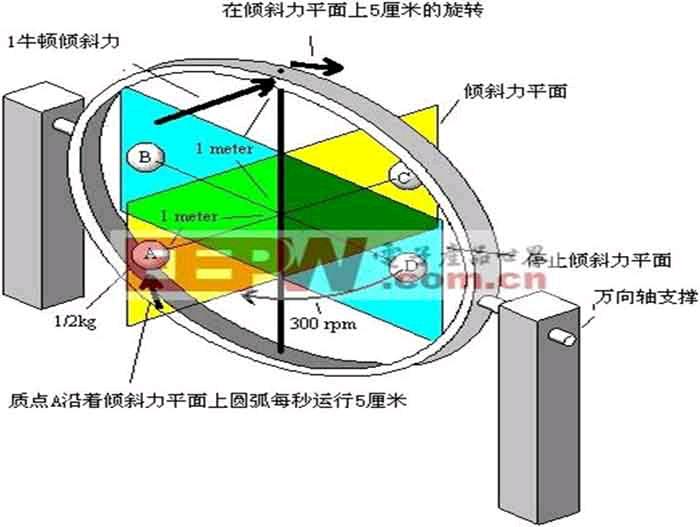
伺服電機的優點有:一、精度上實現了位置,速度和力矩的閉環控制;克服了步進電機失步的問題;二、抗過載能力強,能承受三倍于額定轉矩的負載,對有瞬間負載波動和要求快速起動的場合特別適用;三、低速狀態下運行平穩,低速運行時不會產生類似于步進電機的步進運行現象。適用于有高速響應要求的場合;四、電機加減速的動態相應時間短,一般在幾十毫秒之內。還有,與其他電機相比較,伺服電機發熱和噪音明顯降低。
伺服電機主要運用于具有有動力源,而且對精度有要求的設備。如機床、印刷設備、包裝設備、紡織設備、激光加工設備、機器人、自動化生產線等對工藝精度、加工效率和工作可靠性等要求相對較高的設備。
2、路徑規劃。路徑規劃(Path Planning)指移動機器人為實現某一功能搜尋一條從起始狀態到目標狀態的最優或次優路徑,該技術是很多技術領域研究的熱點,具有廣闊的應用前景和科研價值。
二、機器人功能設計
此機器人的繪制功能主要體現在筆的移動。通過螺旋傳動電機的運行使筆升降達到提落筆的功能,并通過編程對機器人進行路徑規劃,完成繪制交通標識的功能。多次實驗證明:只要編程程序完整準確,該機器人能夠在非極端環境下勝任繪制任何二維圖形的工作。
1、機器人結構設計。該機器人主要由伺服電機、絲杠傳動裝置、移動底盤、單軸陀螺儀及萬向輪組成。主要由行走、起落筆結構兩部分組成。
第一,行走結構。該機器人的移動底盤為雙驅動輪三點式行走結構,通過編程控制兩驅動電機的轉向及轉速(轉速差),使機器人沿著既定路線移動。此種結構穩定性好,而且節省空間,方便使用。
第二,起落筆結構。通過螺旋傳動裝置完成筆的提升下落功能,再加裝彈簧使之適應地面,用如圖示的夾持機構固定繪制工具(筆)。再由伺服電機控制精確,達到行駛既定路線完成繪制的功能。
第三,總體結構說明。交通繪制機器人主要由加裝陀螺儀的雙伺服電機行走底盤與伺服電機起落筆機構的配合完成繪制功能,總體在空間上呈三角形,結構堅固穩定,占地面積較少。
為了簡代控制模型,我設計了繪制工具的軸線與兩驅動輪軸線重點相交于一點的結構,使得機器人在繪制過程中的動作簡單連貫,同時簡化了路徑規劃算法和編程難度。
希望在不久的將來,該機器人出現在人們生活的方方面面,幫助人們解決許多問題。
參考文獻
[1] 呂學詩.工業機器人在生產和生活中的應用[J].上海機械,1980(07):19-21.
[2] 郭磊,廖啟征,魏世民.用速率陀螺儀實現基于單片機的角度隨動系統研究——在自行車機器人的平衡控制中的應用[J].機電產品開發與創新,2005(02):11-13.endprint