環境感知自動巡航無人車設計
2017-09-28 11:36:29趙甜甜陳萬培顧益飛
無線電工程 2017年10期
趙甜甜,陳萬培,顧益飛,張 雷,周 磊
(揚州大學 信息工程學院,江蘇 揚州225127)
環境感知自動巡航無人車設計
趙甜甜,陳萬培,顧益飛,張 雷,周 磊
(揚州大學 信息工程學院,江蘇 揚州225127)
針對自然保護區的生態監測問題,以彌補無人機監控空白與提高監測數據多樣性為目標,設計了自動巡航機器人。機器人采用百度地圖規劃作業路徑,巡航依賴慣性導航,并且支持地圖定位;設計侵入式雷達傳感系統,通過ZigBee節點傳輸信息,以機器人為中繼節點,傳回移動監控端后,匯至云平臺供用戶查看;通過智能手套控制機械臂,實現對傳感器節點的回收和放置;通過虛擬控制手柄遠程控制攝像頭,并將視頻信息至移動終端。測試結果表明,系統各項測試可靠率均在90%以上,該系統可實現高效的環境檢測和科學的環境管理。
野外環境;機器人;機械臂;慣性導航;虛擬現實
0 引言
隨著工業發展,環境問題已嚴重影響社會的可持續發展,特別是長期以來粗放型經濟增長方式,使環境遭到很大破壞,已經影響到人類健康。但是目前社會上的環境監測存在較多缺陷:① 監測設備大多依靠進口,且工作條件要求高,需安裝于實驗室,尤其不適應于生產現場、野外和邊遠地區等環境的應急監測;② 較多環境監測系統采用的是有線或有線加調制解調器或光纖等通訊方式,但是在環境監控系統中,很多監控點必須是野外、企業排污點等無人值守的搭建有線網絡困難的環境;③ 環境監測領域的熱點:基于無人機的環境監測系統,其對于復雜的野外環境的內部具體情況監測不夠細致。針對上述問題,本文提出一種新的環境監測方式——基于環境感知自動巡航無人車。
無人車指的是能夠在野外環境以及各種路面行駛并執行某些任務但車內沒有操縱者的車輛[1]。其中自主車輛具有初步的人工智能,能夠自主行駛、自動執行巡邏和監視等任務[2]。
目前無人車裝備導航系統有GPS導航系統、北斗導航系統、慣性導航系統和GLONASS導航系統等[3]。其中GPS導航系統直接受控于美國國防部,不是自主式導航,使用權受制于人,并且信號易被遮擋,動態響應能力差,易受電子干擾[4]。現如今應用越來越廣泛的捷聯慣導系統具有完全自主、快速、動態性能好和短期精度高等優點。
隨著傳感器的發展,環境感知能夠實現的功能也越來越豐富,包括障礙物檢測、車輛行人檢測[5]、道路跟蹤[6]、路標識別[7]、同時定位與地圖構建[8]等。而越來越多復雜場景下的自主導航要求也給環境感知問題帶來了更大的挑戰[9-10]。
綜上,無人車可改變當前滯后的環境監測技術,解決環境監測遇到的困難和難題,并特有的無線化、智能化、集成化以及網絡化屬性,現已成為環境監測領域研究的熱點。
1 系統總體設計
本機器人用于野外無人環境的巡航,以百度地圖規劃的線路為作業路徑,通過慣性導航實現巡航,并實時傳輸自身定位信息至移動監控端以實現地圖定位;設計侵入傳感系統,通過ZigBee節點傳輸感知信息,以機器人為中繼節點,傳回移動監控端后,匯至云平臺供用戶查看;通過智能手套控制機器人,配合地圖預置作業任務實現對傳感器節點的回收和放置;在巡航時,可通過虛擬控制手柄遠程控制攝像頭,并傳回視頻信息至移動終端。系統結構如圖1所示。
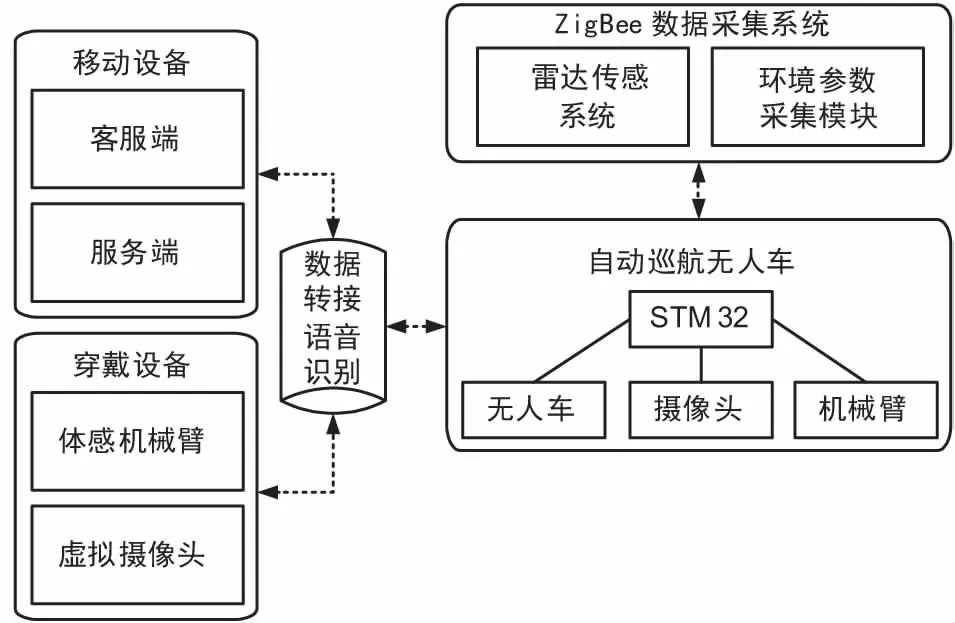
圖1 系統結構
系統主要分為3部分:① 系統前端由ZigBee數據采集模塊和雷達侵入傳感器模塊構成數據采集子系統;② 系統中端是自動巡航無人車;③ 系統后端是數據轉接子系統、穿戴設備和終端設備。
2 硬件設計
2.1 環境參數采集子系統
環境參數采集子系統包括2個部分:雷達侵入傳感系統和ZigBee數據采集模塊。其中雷達侵入傳感系統是以Micro Blaze為核心的片上系統(SoC),其核心控制單元為FPGA的Artix-7,步進電機通過GPIO接口與其連接,雷達模塊和ZigBee節點均通過UART接口與其通信,可完成侵入信息的采集,面積功耗小于CPU實現的同類系統。ZigBee數據采集模塊中溫度、濕度,光照傳感器與ZigBee終端節點通過GPIO口通信,采集所需的環境參數數據。
2.2 自動巡航機器人子系統
2.2.1 無人車模塊
無人車模塊包括坦克車模、MPU6050和光電傳感器,其中主控板STM32借助脈沖寬度調制控制坦克車模,通過IIC接口與MPU6050,通過GPIO與光電傳感器的信號輸出線相連。
2.2.2 機器臂模塊
機器臂模塊采用STC12C5A作為核心控制板,主要用于處理體感機械臂的數據和控制實體六軸機械臂。核心控制板STC12C5A通過UART接口與主控板STM32通信,此外6個舵機分別與其舵機控制口相連。
2.2.3 攝像頭模塊
攝象頭模塊硬件設備有二自由度云臺、CC3200和攝像頭MT9D111,其中主控板STM32通過GPIO接口控制二自由度云臺,攝像頭MT9D111與CC3200置于云臺之上,且通過IIC和并行接口與CC3200通信,完成可調拍攝方向的視頻監控功能。
2.3 數據轉接子系統
數據轉接子系統包括3部分:語音模塊、藍牙數據傳輸模塊和2401數據傳輸模塊。其中藍牙數據傳輸模塊用于實現本子系統和穿戴設備與終端設備之間的數據傳輸功能,2401數據傳輸模塊用于實現與自動巡航機器人子系統之間的數據傳輸功能。語音模塊用于實現語音識別、控制和人機交互的功能。
2.4 穿戴設備
2.4.1 智能手套
智能手套硬件包括2個MPU6050和1個航姿參考系統(AHRS),主要用于捕捉操作者手臂真實的運動狀態。2個MPU6050通過IIC接口與穿戴設備的主控板STM32相連,并分別固定于指尖處和手腕處;航姿參考系統(AHRS)通過UART接口與穿戴設備的主控板STM32通信,并固定于手臂處。
航姿參考系統(AHRS)是一種主要采用慣性傳感器以數據融和算法精確測量空間姿態的傳感系統,一般由相互正交的三軸陀螺儀、三軸加速度計以及三軸磁強計組成,其可通過算法估算出捷聯物體在重力場方向以及地磁場水平分量方向構成的坐標系下的三維姿態[11-14],廣泛應用于航空航天[15]、機器人[16-17]以及生物運動分析[18]。
2.4.2 虛擬控制手柄
虛擬控制手柄包括一個航姿參考系統(AHRS),通過IIC接口與穿戴設備的主控板STM32相連,經過主控板處理后,發送至自動巡航機器人子系統,控制攝像頭的拍攝方向。
3 關鍵軟件設計
系統軟件包括5部分:ZigBee數據采集、自動巡航機器人、數據轉接、穿戴設備軟件與終端設備軟件,其中ZigBee數據采集、自動巡航機器人、數據轉接和穿戴設備軟件采用C語言開發,終端設備軟件采用Java和C#開發。
3.1 語音模塊
語音模塊的主要用途為語音識別、語音指令與人與機器的友好交流。工作流程:模塊初始化,包括延時函數初始化、串口初始化以及內部內存池初始化;緊接著檢測是否有SD卡,若有,則為文件系統的相關變量申請內存,否則繼續檢測;然后掛載SD卡,最后,轉至LD3320的執行函數。
在LD3320執行函數的具體設計過程中,采用狀態機方式實現,其狀態機如圖2所示。
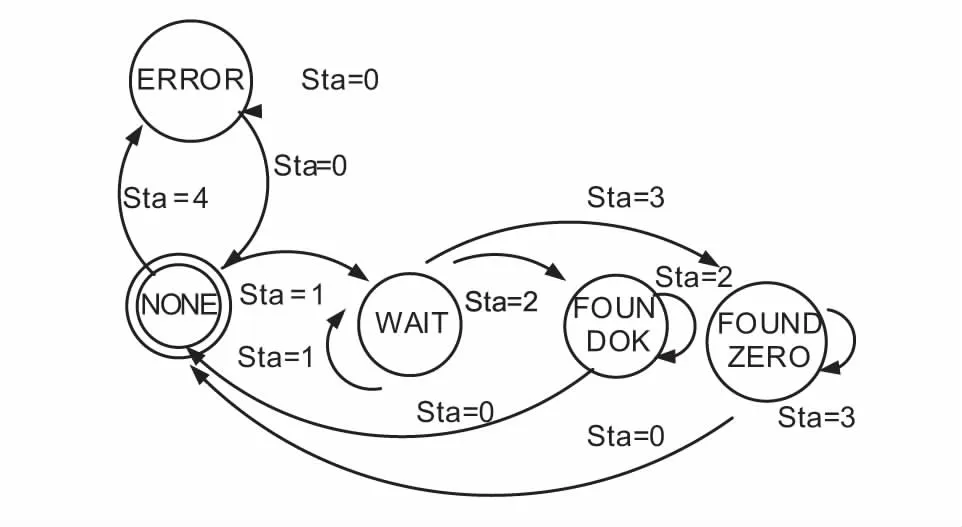
圖2 LD3320工作流程
首先,開始一次自動語音識別過程(包括自動語音識別的初始化,自動語音識別增添關鍵字和開始自動語音識別的運算),等待自動語音識別過程結束后,若存在語音識別的結果,則讀取該結果;否則轉到初始化狀態,重復一次上述操作。
在取自動語音識別結果的過程中,支持對結果執行相關的Mp3語音播放操作,其工作流程如圖3所示。
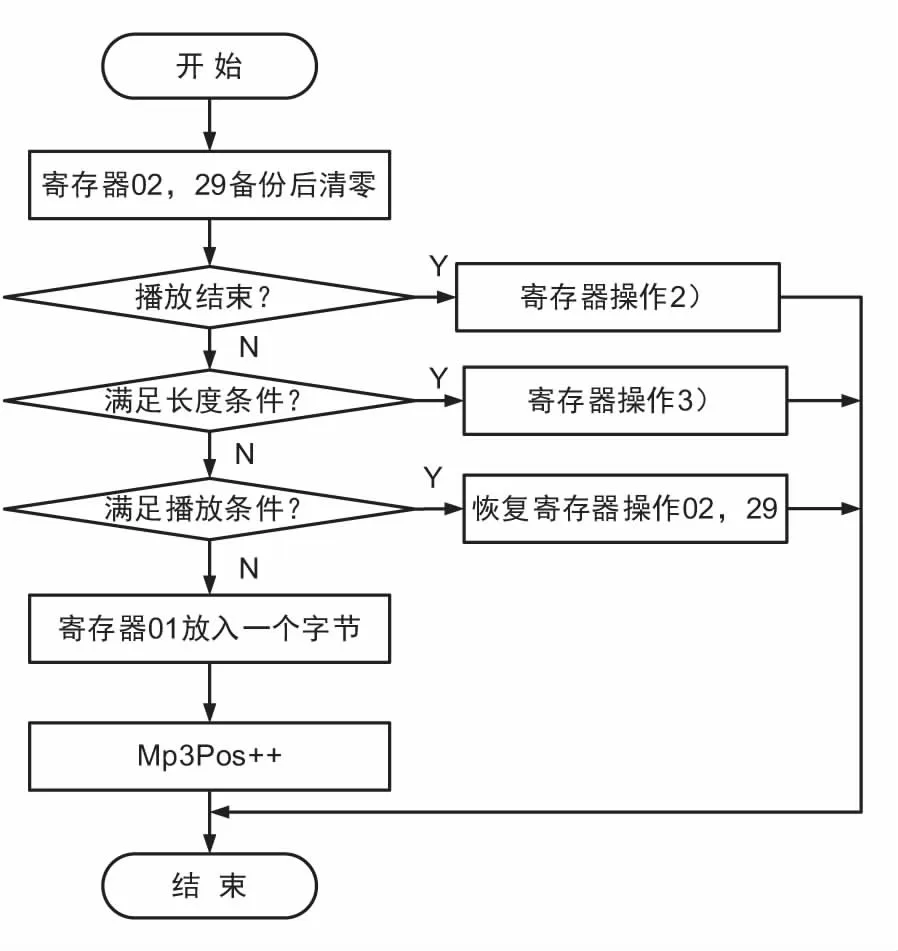
圖3 ASR取識別結果工作流程
3.2 無人車
無人車支持路徑規劃和遙控2種控制方式。無人車的作業路線依賴百度地圖在線規劃,然后借助慣性導航系統,完成自動巡航的功能,并實時傳輸自身定位信息至移動監控端以實現無人車在地圖界面的定位和3D虛擬場景漫游。
通常慣性導航利用慣性器件測量角速度和加速度信息,然后使用牛頓運動定律計算載體時速度和位置,而且可以連續提供載體位置、線速度、角速度和姿態角等參數,因此慣導具備不依賴外界信息、不向外界輻射能量、不受干擾和隱蔽性好的優點,這是無線電定位技術和衛星定位技術等技術無法達到的,在戰場等無線信號微弱的惡劣環境都有較大的應用價值。
在本模塊中,MPU6050提供無人車導航所需的加速度值和角度信息,其被直接安裝在無人車上,因此無人車的導航方式為捷聯式慣導系統。
因為制作技術不足和嘈雜環境干擾,傳感器一般需要進行數據融合來減小誤差[19]。車體震動會影響加速度計,而由于車體運動產生的噪聲會隨著運動速率的增加而增大,因此長時間工作對加速度測量的影響更大。陀螺儀屬于測量旋轉運動的磁通傳感器,其輸出數據呈現明顯的非線性特質[20],輸出值是圍繞某個軸向的旋轉角速率,其可通過角速率對時間積分得到角度值,所以受到積累漂移誤差影響,不便于單獨地較長時間的工作[21]。
自動巡航機器人運用了采用AHRS的慣性導航系統算法,其可依據觀測數據,自適應修正信號的噪聲,與卡爾曼濾波相輔相成,提高系統的穩定性和魯棒性。
采用四元數表示b系~n系的坐標變換矩陣:
在東北天坐標系中,采用歐拉角的形式表示b系~n系的坐標變換矩陣:

MARG(Magnetic,Angular,Rate,Gravity)算法:在靜態情況下,通過采集加速度計和磁力計的測量數據來得到載體的絕對姿態。



在每一個卡爾曼濾波周期中,包括狀態預測、狀態估計和增益矩陣、誤差自相關矩陣計算流程。卡爾曼濾波的詳細操作如下:
步驟1:狀態向量x(^)0|0以及誤差自相關矩陣P0初始化;
步驟2: 由觀測信號z(n)計算新息過程,αn=zn-Cnx(^)n|n-1;
步驟3:一步預測誤差自相關矩陣,Pn|n-1=Fn|n-1Pn-1Fn|n-1+Wn-1;
步驟6:狀態估計,x(^)n=x(^)n|n-1+Knαn;
步驟7:狀態估計誤差自相關矩陣,Pn=[1-KnCn]Pn|n-1。
在卡爾曼濾波過程中,αK定義為殘差向量,其可表征濾波模型的準確度。
按照卡爾曼濾波的原理,本系統在此基礎上提出了適用于自身的卡爾曼濾波器。自適應濾波的工作原理:經過殘差的測量方程和理論方差兩者比值的監測,實時估計測量方差。當模型準確時,比值應在1附近;在檢測到噪聲改變的情況下,兩者比值偏離1,系統此時需修正觀測噪聲。
航姿參考系統的觀測向量——加速度和地磁信息,兩者是完全獨立。
殘差向量的測量方差CK為:
理論方差SK為:
式中,CA為加速度信息的測量方程;SA為理論方差;加速度信息與地磁信息的測量協方差為CAM、CMA,理論協方差為SAM、SMA;CM、SM為地磁信息的測量方差和理論方差。
4 系統測試分析
4.1 語音識別測試
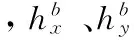
本系統加入了語音模塊,其主要功能為語音識別、語音指令和人機的友好交流。在實驗室測試階段,選擇多個不同音色的人在實驗室環境下分別進行測試,對識別率進行了多達700多次的測試和統計。部分非特定人的語音命令測試的正確識別數據比例如表1所示。
通過最后的穩定性測試和統計,語音識別成功率可高達90.69%,達到了預期的功能性目的的同時,也達到了穩定性的要求。本語音識別部分性能良好,成本低廉,且便于在未來繼續完善并拓展其功能,將具有廣闊的應用前景。
表1 語音命令測試的正確識別數據表
語音命令人聲1(男)人聲2(女)人聲3(男)人聲4(女)你好26/3025/3025/3024/30你的名字27/3028/3029/3026/30開始啟動29/3027/3026/3028/30停止運行26/3029/3027/3029/30讀取數據30/3026/3029/3028/30運行現狀25/3028/3030/3026/30
4.2 通信距離測試
無人車與固定基站之間有效的通信距離,是衡量本系統性能好壞的重要標志之一。
4.2.1 無人車數據發送至手機端的測試方案
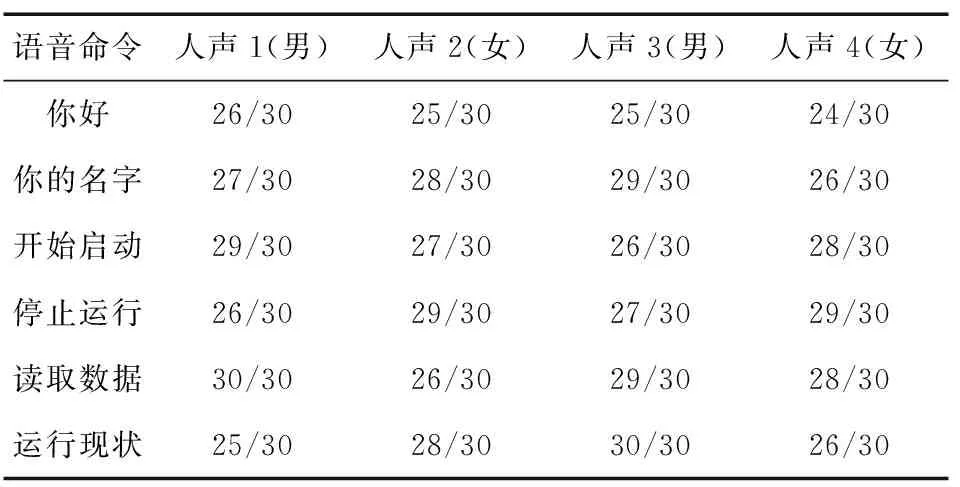
無人車每個1S向手機端發送固定長度的測試包,數據包的數量為1 000個,手機端計算接收到測試包的數量,計算通信丟包率,其測試結果如表2所示。
表2 通信距離及丟包率測試
通信距離/m室內丟包率/%室外丟包率/%100002005050010110002021500303200058625009010
4.2.2 手機端指令發送至無人車的測試方案
在空曠環境下,手機端與無人車相距1 000 m。手機端向無人車發送控制指令,控制指令總數為100個,觀察無人車的狀態,記錄無人車識別指令的次數,其測試結果如表3所示。
表3 控制命令測試的正確識別數據表
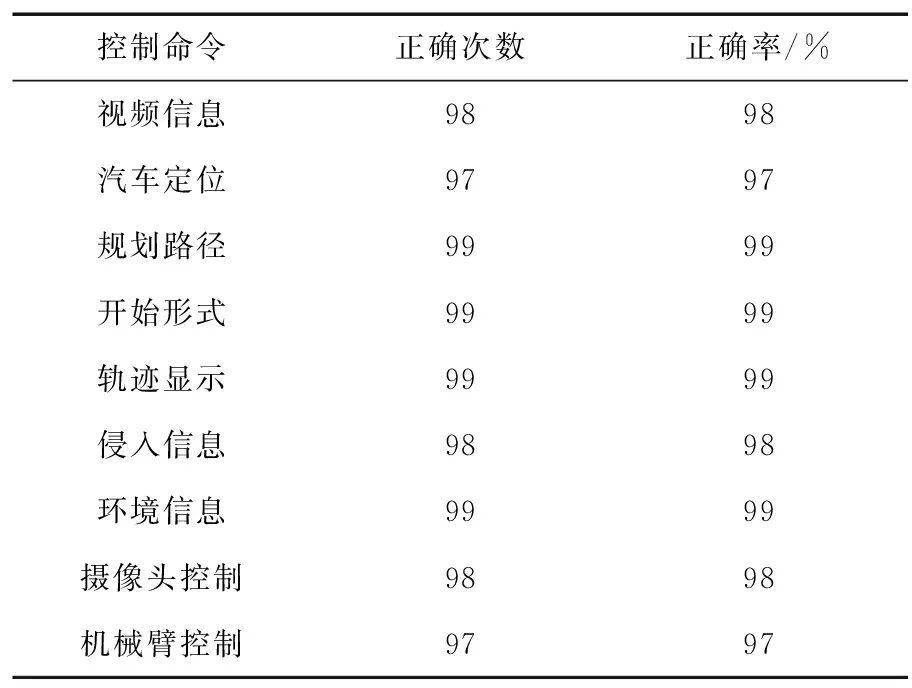
控制命令正確次數正確率/%視頻信息9898汽車定位9797規劃路徑9999開始形式9999軌跡顯示9999侵入信息9898環境信息9999攝像頭控制9898機械臂控制9797
綜合上述測試結果可知,基于虛擬體驗的環境感知無人數據傳輸的可靠性較高,其中室內傳輸距離較短,但是野外空曠環境基本上可以支持1 500 m左右的有效傳輸距離,而且無人車對控制命令識別的正確率也較高,達到了預期的功能性目的的同時,也達到了穩定性的要求。
4.3 慣性導航
在本系統中,慣性導航是為無人車讀取底層數據采集節點服務。由于ZigBee之間的通信距離大概在100 m之內,因此無人車僅需進入讀取的有效距離便可讀取數據,完成系統預設的作業任務;另外,系統中無人車可借助自帶的機械臂完成傳感器節點的回收和放置,除了依賴慣性導航外,還需要視頻信息和遙控方式的配合。無人車執行讀取數據任務時,其路徑的導航狀況如圖4所示。其中各節點周圍的虛線圓形為ZigBee的有效傳輸范圍,虛線為百度地圖規劃的線路,實線部分是無人車真實的巡航路線。
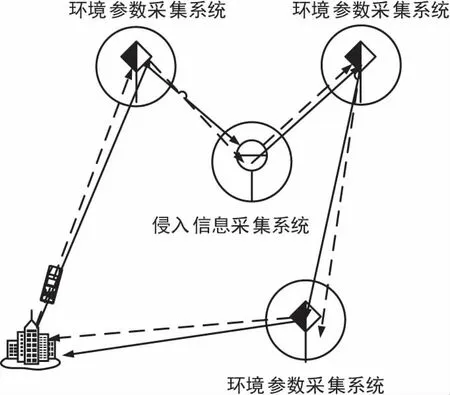
圖4 無人車巡航狀況示意
綜合上述情況,慣性導航的測試可以轉換為無人車在巡航過程中,在作業任務布置所需要收集數據的節點數中,無人車實際正確地收集的節點數據數,其測試統計結果如表4所示。
表4 巡航過程測試數據記錄表
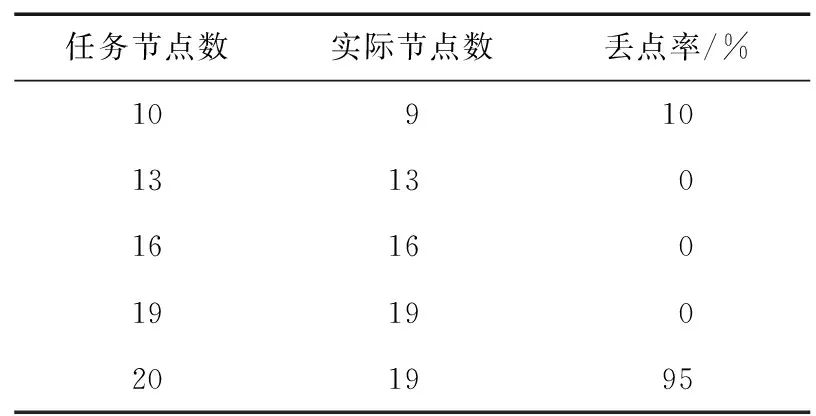
任務節點數實際節點數丟點率/%10910131301616019190201995
5 結束語
隨著科學技術的不斷發展,環境監測設施已經逐步進入人們的視線,并開始廣泛運用于各類復雜環境的監測。但目前環境監測設備依賴進口,價格昂貴,工作環境苛刻,依賴有線網絡。無人機雖能在一定程度上解決上述問題,但是內部具體情況監測不夠細致。以自動巡航機器人為依托,依托各類技術的配合,該機器人能夠準確做到對環境各項數據和區域侵入情況的實時監測,并能夠將監測結果反饋給終端設備并傳輸至云平臺。與無人機相互配合,可改變當前滯后的環境監測技術,解決環境監測中遇到的困難和難題。
[1] 岳松堂,張志杰.外軍無人地面車輛發展分析[J].現代軍事,2007(11):53-56.
[2] 杜穎,丁昆.美軍無人地面車輛概述(三)[J].國防技術基礎,2008(4):49-50
[3] 程鵬飛,蔡艷輝,文漢江,等.全球衛星導航系統 GPS,GLONASS,Galileo 及其他系統[M].北京:測繪出版社,2009.
[4] 劉基余.全球定位原理及其應用[M].北京:測繪出版社,1993.
[5] CHENG J,XIANG Z,CAO T,et al.Robust Vehicle Detection Using 3D Lidar under Complex Urban Environment[C]∥IEEE International Conference on Robotics & Automation,2014:691-696.
[6] ALVAREZ J M,GEVERS T,DIEGO F,et al.Road Geometry Classification by Adaptive Shape Models[J].Intelligent Transportation Systems IEEE Transactions on,2013,14(1):459-468.
[7] CHEN L,LI Q,LI M,et al.Traffic Sign Detection and Recognition for Intelligent Vehicle[C]∥Intelligent Vehicles Symposium(IV),2011:908-913.
[8] LEONARD J J,DURRANT-WHYTE H F.Simultaneous Map Building and Localization for an Autonomous Mobile Robot[C]∥IEEE/RSJ International Workshop on Intelligent Robots & Systems,1991:1442-1447.
[9] LUETTEL T,HIMMELSBACH M,WUENSCHE H J.Autonomous Ground Vehicles—Concepts and a Path to the Future[J].Proceedings of the IEEE,2012,100(5):1831-1839.
[10] LEVINSON J,ASKELAND J,BECKER J,et al.Towards Fully Autonomous Driving:Systems and Algorithms[J].Intelligent Vehicles Symposium,1931,32(14):163-168.
[11] 李翔,李智.航姿參考系統三軸磁強計校正的點積不變法[J].儀器儀表學報,2012,33(8):1813-1818.
[12] 張利,秦海春,王文彬,等.超聲波與航跡推算融合的智能輪椅定位方法[J].電子測量與儀器學報,2014,28(1):62-68.
[13] 秦國慶,賴際舟,陳駔,等.捷聯航姿系統加速度計振動噪聲平滑技術[J].電子測量技術,2013(4):87-91.
[14] 周勝明,徐慶九,曲東才.航向姿態系統綜合檢測儀[J].國外電子測量技術,2006,25(2):20-22.
[15] EUSTON M,COOTE P,MAHONY R,et al.A complementary Filter for Attitude Estimation of a Fixed-wing UAV[C]∥Ieee/rsj International Conference on Intelligent Robots and Systems.IEEE,2008:340-345.
[16] GUPTA G S,BARLOW P,DAVID S.Review of Sensors and Sensor Integration for the Control of a Humanoid Robot[C]∥Conference Record-ieee Instrumentation & Measurement Technology Conference.IEEE,2011:1-5.
[17] YI S J,ZHANG B T,HONG D,et al.Learning Full Body Push Recovery Control for Small Humanoid Robots[J].IEEE International Conference on Robotics and Automation,2011,19(6):2047-2052.
[18] KIM S K,HONG S,KIM D.A Walking Motion Imitation Framework of a Humanoid Robot by Human Walking Recognition from IMU Motion Data[C]∥Ieee-Ras International Conference on Humanoid Robots,2010:343-348.
[19] DONG W,LIM K Y,GOH Y K,et al.A Low-cost Motion Tracker and Its Error Analysis[C]∥IEEE International Conference on Robotics & Automation,2008:311-316.
[20] 劉艷霞,李希勝,馮毅博,等.三軸磁羅盤標定位置分布的研究[J].儀器儀表學報,2013,34(3):684-690.
[21] 郜園園,阮曉鋼,宋洪軍,等.兩輪自平衡機器人慣性傳感器濾波問題的研究[J].傳感技術學報,2010,23(5):696-700.
DesignofAutomaticCruiseUnmannedGroundVehicleBasedonEnvironmentalPerception
ZHAO Tian-tian,CHEN Wan-pei,GU Yi-fei,ZHANG Lei,ZHOU Lei
(InstituteofInformationEngineering,YangzhouUniversity,YangzhouJiangsu225127,China)
Aiming at the problem of ecological monitoring in nature reserves,an automatic cruise robot is designed to make up the blanks of UAVs and improve the diversity of monitoring data.The robot based on inertial navigation uses Baidu map to plan the job path.And it supports map positioning.This project designs an intrusion sensing system that transmits information through a ZigBee node.The robot can serve as a relay node.After reaching back to the mobile monitoring side,the data is converged to the cloud platform for users to view.The operator controls robot arm through the smart glove in order to meet the map preset task to achieve the sensor node recovery and placement.The operator controls camera remotely through the virtual control handle and the camera will send video information to the mobile terminal.In addition,the robot also supports voice recognition,control and human-computer interaction.After testing,the system helps to grasp the characteristics of the field environment in real time.Test results show that the reliability of the system test are more than 90%,the system can achieve efficient environmental testing and scientific environmental management.
wild environment;robot;mechanical arm;inertial navigation;virtual reality
10.3969/j.issn.1003-3106.2017.10.16
趙甜甜,陳萬培,顧益飛,等.環境感知自動巡航無人車設計[J].無線電工程,2017,47(10):73-78.[ZHAO Tiantian,CHEN Wanpei,GU Yifei,et al.Design of Automatic Cruise Unmanned Ground Vehicle Based on Environmental Perception[J].Radio Engineering,2017,47(10):73-78.]
TN919
A
1003-3106(2017)10-0073-06
2017-04-28
國家自然科學基金資助項目(61376025,61301111);江蘇省高校自然科學基金資助項目(13KJB510039);揚州市自然科學青年基金資助項目(SQN20150035)。
趙甜甜女,(1994—),本科生。主要研究方向:電子信息工程。陳萬培男,(1962—),副教授,碩士研究生導師。主要研究方向:信號處理與信息傳輸。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
中老年保健(2021年12期)2021-08-24 03:30:40
中國傳媒大學學報(自然科學版)(2021年1期)2021-06-09 08:43:00
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中國生殖健康(2020年6期)2020-02-01 06:28:50
新世紀智能(英語備考)(2019年12期)2020-01-13 06:07:18
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中國生殖健康(2019年11期)2019-01-07 01:28:02
