基于線性反饋滑模法實現分數階多渦卷混沌系統同步
2017-09-21 07:04:34于海東岳麗娟
東北師大學報(自然科學版) 2017年3期
關鍵詞:系統
祁 平,于海東,劉 爽,岳麗娟
(東北師范大學物理學院,吉林 長春130024)
基于線性反饋滑模法實現分數階多渦卷混沌系統同步
祁 平,于海東,劉 爽,岳麗娟
(東北師范大學物理學院,吉林 長春130024)
將整數階多渦卷混沌系統推廣到分數階多渦卷混沌系統.利用線性反饋控制理論和滑模控制理論,設計了線性反饋滑模控制器,在僅加一項控制器的條件下不但使該分數階多渦卷混沌系統達到了同步且縮短了達到同步的時間.數值仿真結果表明了該方法的有效性.
分數階多渦卷混沌系統;線性反饋法;線性反饋滑模法;混沌同步
在非線性系統中產生各種不同類型的多渦卷混沌吸引子是近年來物理學和信息科學界所研究的熱點之一.1991年,Suykens等[1]首次提出了多渦卷蔡氏混沌吸引子的概念,之后人們對多渦卷混沌吸引子的產生進行了一些研究;王發強等[2]通過構造分段線性函數在四維系統中產生橫向偶數個多渦卷;陳仕必等[3]用多項式和階躍函數構造出網格多渦卷;諶龍等[4]提出一種基于平移變換的多渦卷混沌系統的構造方法.現有的文獻中大多數都是整數階多渦卷混沌系統的構造方法.而整數階微分是分數階微分的特例,整數階混沌系統是對實際混沌系統的理想化處理.利用分數階微分算子能夠更準確地描述實際系統的動力學特性,由于分數階混沌系統具有更復雜的動力學行為,所以將其用于通信保密具有更高的安全性.人們提出了很多分數階混沌系統的同步方法,如驅動-響應同步法[5]、自適應同步法[6]、主動控制同步法[7]、線性反饋同步法[8]、滑模控制法[9]等.潘光等[10]提出了一種分數階混沌系統同步的自適應滑模控制器的設計方法;孫寧等[11]提出使用新的分數階滑模面的主動控制法,實現了分數階超混沌Chen系統的投影同步.但目前文獻中對分數階多渦卷混沌系統同步研究較少.
本文在蔡氏系統的基礎上進行改進,產生多渦卷混沌吸引子,從而有規律地提高了系統的復雜性,并將整數階多渦卷混沌系統推廣為分數階多渦卷混沌系統,通過線性反饋法對該分數階多渦卷混沌系統同步進行了研究,但同步效果不是十分理想且同步時間較長.因此,提出了線性反饋滑模法,在僅加一項控制器的條件下,對該分數階多渦卷混沌系統進行了同步研究.結果表明,線性反饋滑模法極大地縮短了同步時間.
1 分數階多渦卷混沌系統
在Chua系統的基礎上,通過增加非線性項構造單方向多渦卷混沌系統,其無量綱狀態方程為

(1)
其中α=15.2,β=18.9,ε=0.7為系統參數,即非線性函數為
(2)
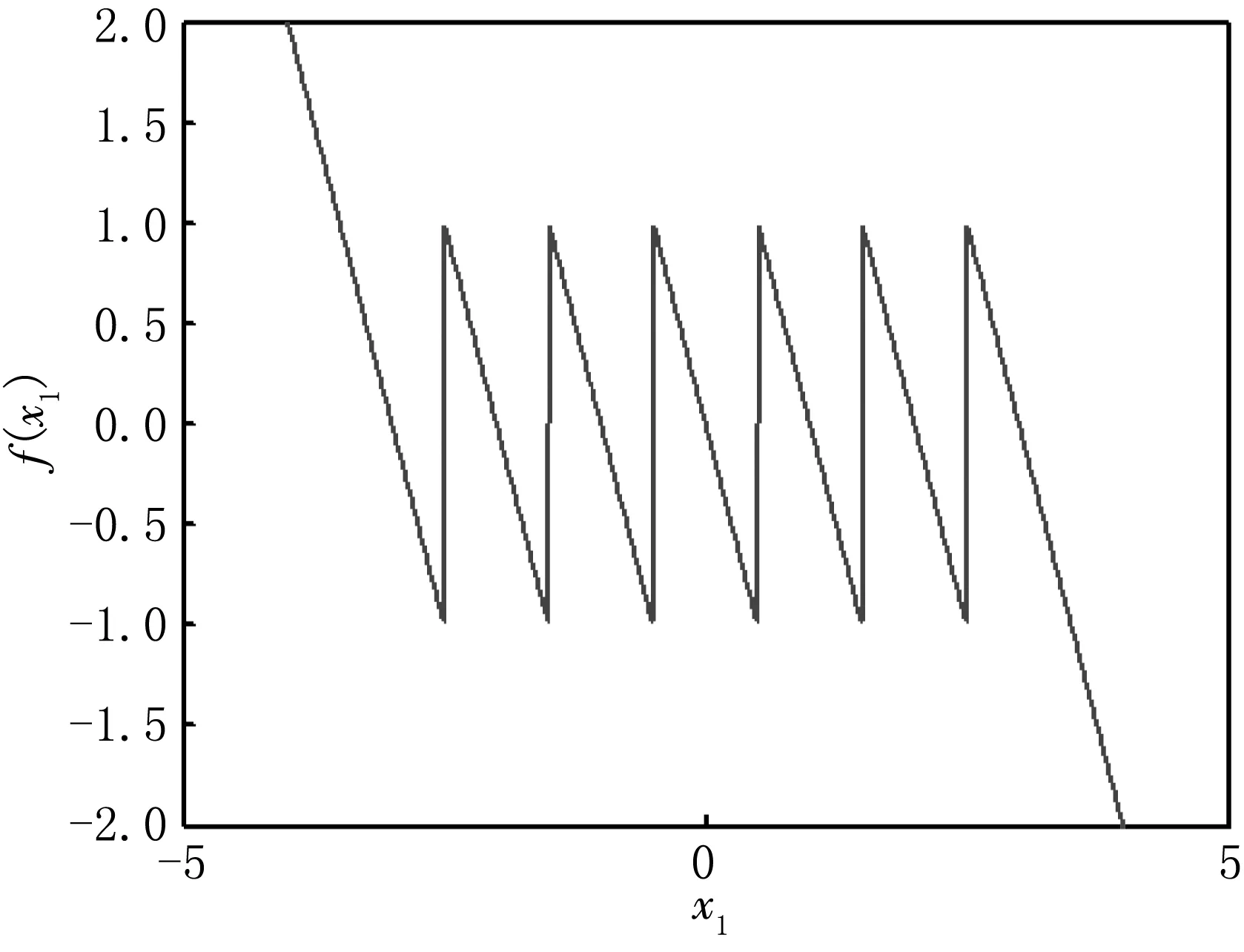
圖1 非線性函數f(x1)圖像
當λ=1,k=1,n=2時,非線性函數f(x1)的圖像如圖1所示.該非線性函數由斜率為∞的鍵波所隔開的6個分段線性函數組成,相應的線性函數區即為渦卷區,在該非線性函數的作用下可產生由鍵波運動所聯系的六渦卷運動.經分析可知,當λ,k值一定時,改變參數n的數值即可產生2n+2個渦卷吸引子.
當λ=1,k=1,n=2和n=3時仿真結果如圖2所示.
將整數階多渦卷混沌系統推廣到分數階多渦卷混沌系統,分數階多渦卷混沌系統的方程為:
其中f(x1)為非線性函數,即
(4)
其中α,β,ε,λ,k為系統參數,其取值與整數階系統中參數取值相同.選取系統的階次q1=q2=q3=0.98,取不同的n值可以得到2n+2個多渦卷混沌吸引子.
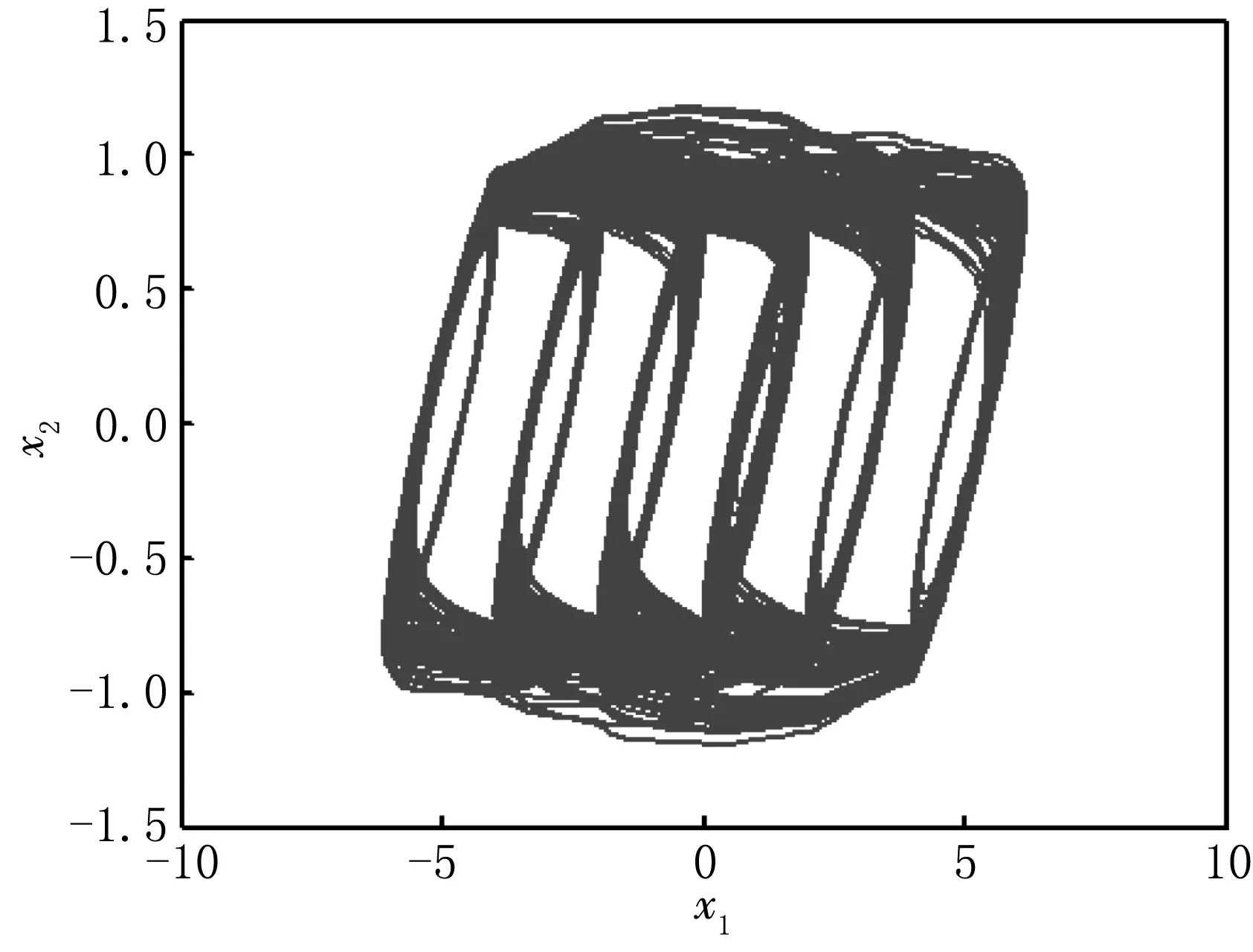
(a)n=2六渦卷混沌吸引子

(b)n=3八渦卷混沌吸引子
當n=2時分數階六渦卷混沌吸引子和當n=3時分數階八渦卷混沌吸引子如圖3所示.
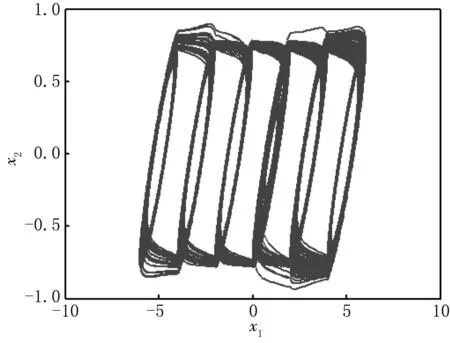
(a)n=2六渦卷混沌吸引子
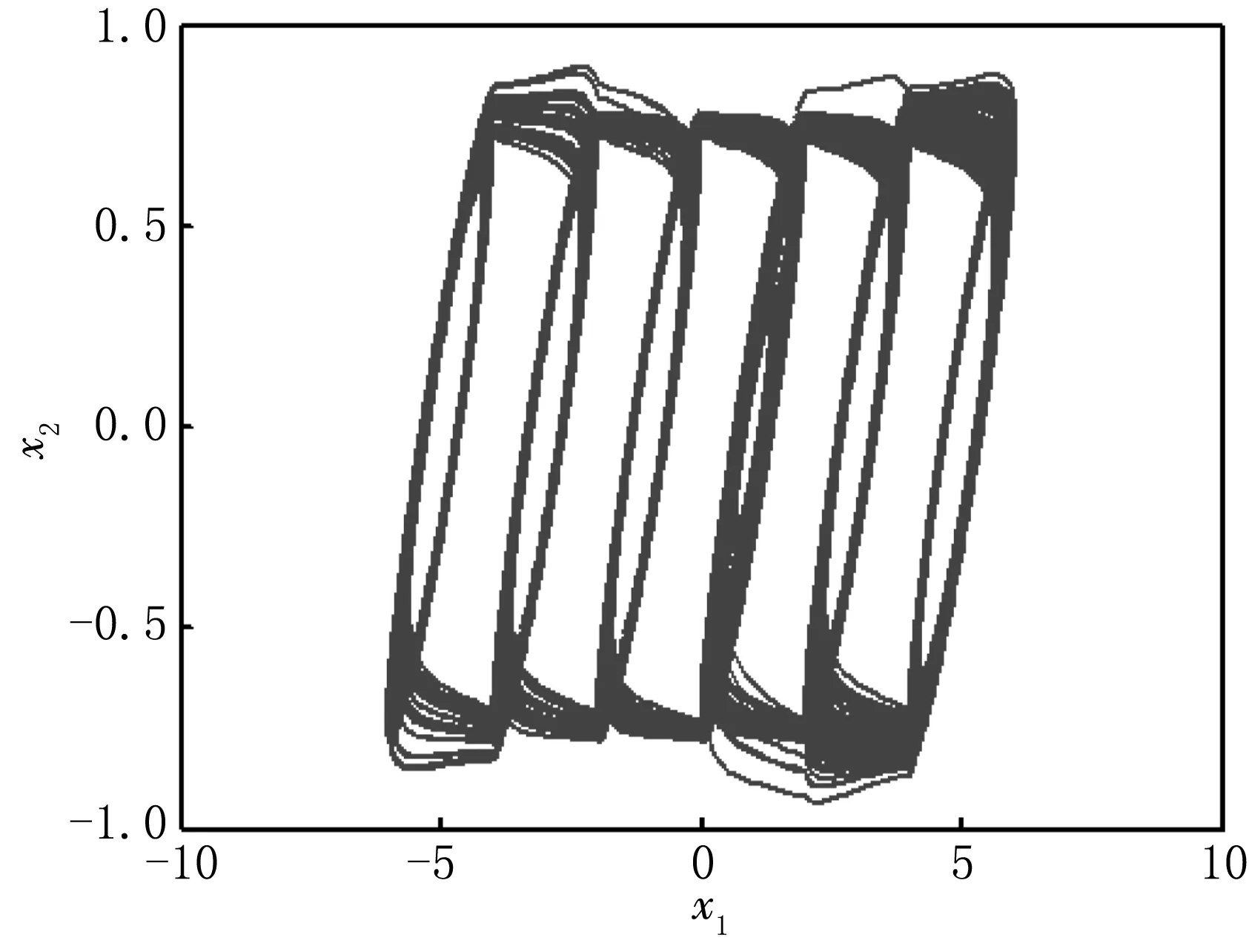
(b)n=3八渦卷混沌吸引子
由數值仿真結果可見,分數階混沌系統可得到多渦卷混沌吸引子,拓寬了其在通信保密中的應用.
2 線性反饋法實現分數階多渦卷混沌系統同步
系統(3)為驅動系統,響應系統為:
其中u為控制器,通過選擇合適的控制器u可使初值不同的響應系統與驅動系統達到同步.
誤差為
ei=yi-xi.
(6)
則誤差系統為:


(7)
設控制器為
u=-ke1.
(8)
證明構造Lyapunov函數為:
(9)

(10)
根據混沌系統的有界性
(11)
其中
(12)
當k>0時,則Q為正定的,響應系統與驅動系統達到同步.
選取驅動系統的初值為(x1(0),x2(0),x3(0))=(0.9,0.1,0.1),響應系統的初值為(y1(0),y2(0),y3(0))=(0.8,0.5,0.6),系統階數為q1=q2=q3=0.98,k=50,同步結果如圖4所示.
(a)e1隨時間t變化圖像
(b)e2隨時間t變化圖像

(c)e3隨時間t變化圖像
數值仿真結果表明,線性反饋法實現了分數階多渦卷混沌系統同步,但同步效果不是十分理想,較長時間之后才可使驅動系統與響應系統達到同步.
3 線性反饋滑模法實現分數階多渦卷混沌系統同步
線性反饋滑模控制器為
u=u1+u2.
(13)
其中u1為線性反饋控制器,u2為滑模控制器.線性反饋控制器為
u1=-ke1=-k(y1-x1).
(14)
選取分數階滑模面為
s(e)=CDα-1e(t).
(15)
則

(16)
設滑模控制律為

(17)
其中p,r為增益,且p>0,r>0,sgn(s)為符號函數,即
(18)
u2=-C-1(psgn(s)+rs)+α(εf(y1)-εf(x1))-αe2.
(19)
線性反饋滑模控制器為
u=u1+u2=-ke1-C-1(psgn(s)+rs)+α(εf(y1)-εf(x1))-αe2.
(20)
證明考慮如下的Lyapunov函數為

(21)
則
(22)
當pmin>0,rmin>0時,系統的軌跡在控制律作用下達到滑模面,此時誤差系統為:
(23)
構造Lyapunov函數為:
(24)
(25)
其中
(26)
當k>0時,則Q為正定的,響應系統與驅動系統達到同步,根據混沌的有界性,在線性反饋滑模控制器的作用下驅動系統與響應系統可以達到同步.
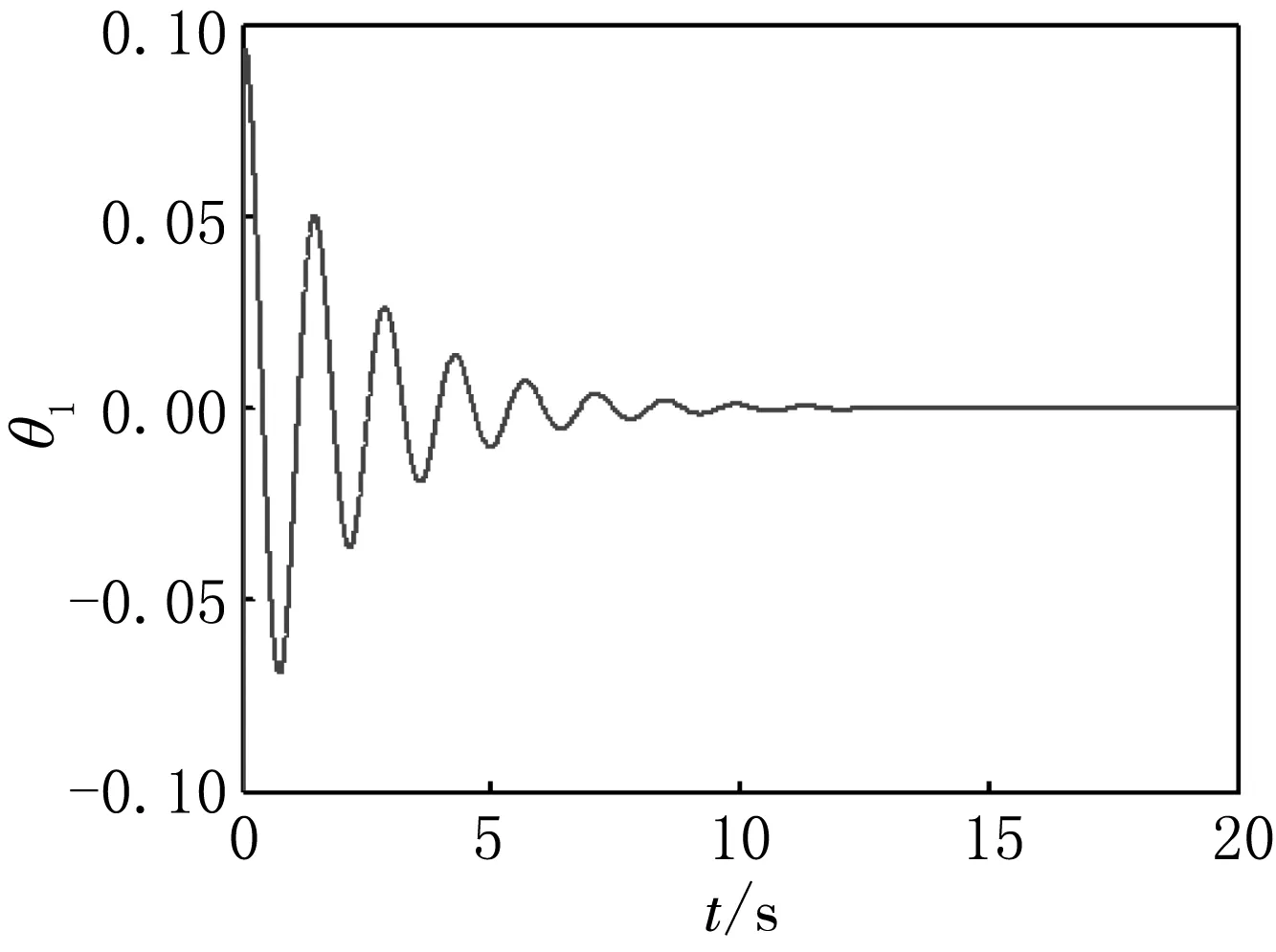
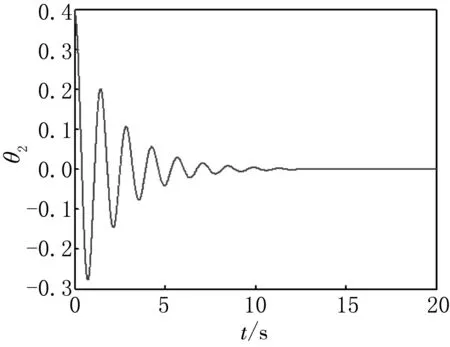
選取驅動系統的初值為(x1(0),x2(0),x3(0))=(0.9,0.1,0.1),響應系統的初值為(y1(0),y2(0),y3(0))=(0.8,0.5,0.6),且k=50,p=0.2,r=26,數值仿真結果如圖5所示.
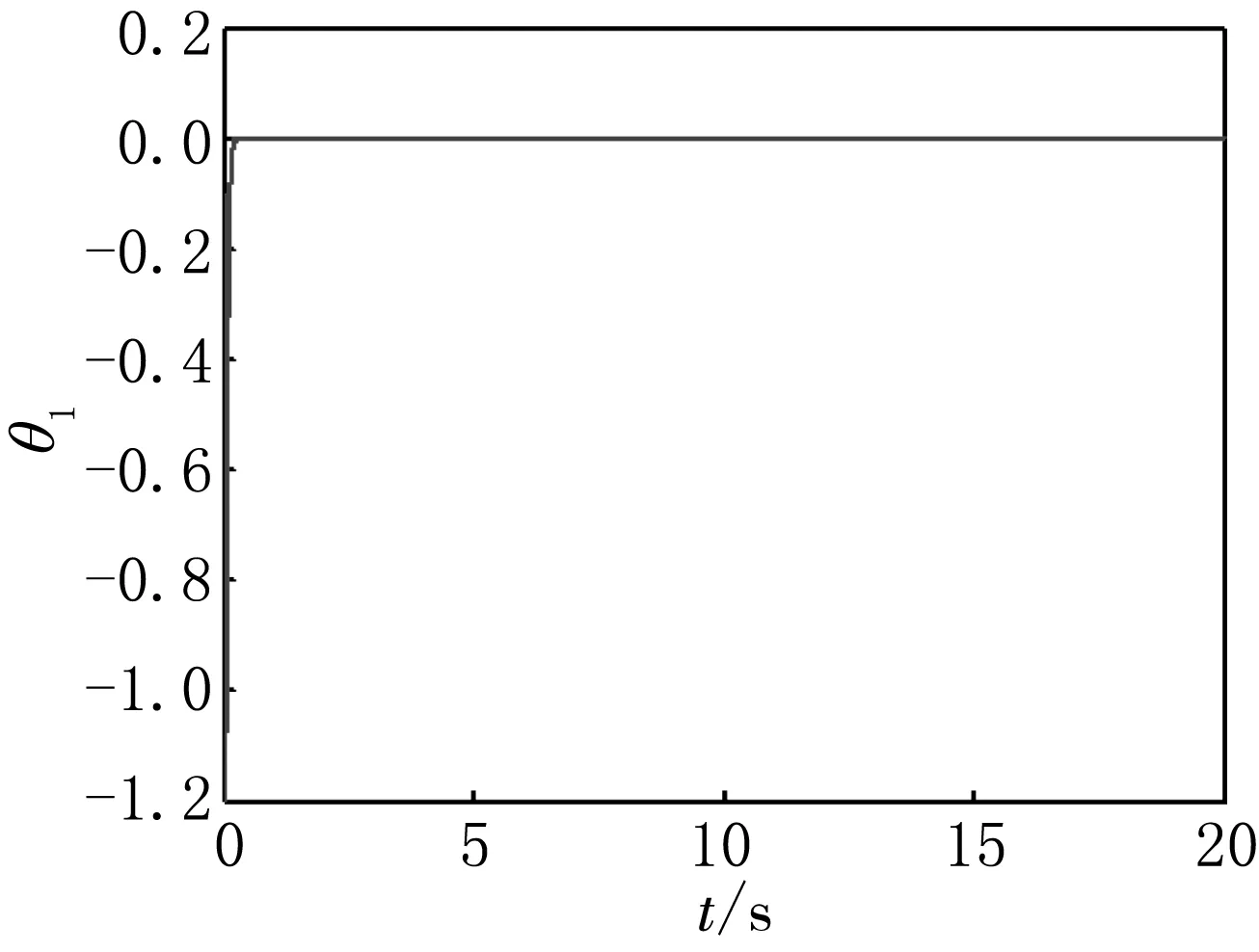
(a)e1隨時間t變化圖像
(b)e2隨時間t變化圖像
(c)e3隨時間t變化圖像
線性反饋滑模法較好地實現了分數階多渦卷混沌系統同步,線性反饋滑模法與線性反饋法對比可知,在僅加一項控制器的條件下線性反饋滑模法縮短了2個系統的同步時間.
4 結論
本文在Chua氏系統的基礎上構造出整數階多渦卷混沌系統,并將其轉變為分數階多渦卷混沌系統,基于線性反饋法和滑模變結構理論,根據Lyapunov穩定性理論和滑模可達條件設計了一個線性反饋滑模控制器,在僅加一項控制器的條件下,實現了分數階多渦卷混沌系統的同步.數值仿真結果表明,線性反饋滑模法比線性反饋法的控制效果好,實現同步時間短,控制器相對簡單,易于實現,應用前景廣闊.
[1] SUYKENS J,VANDEWALLE A K. Quasilinear system and design ofn-double control (n=1,2,3,4,…)[J].Circuits Devices & Systems Iee Proceedings G,1991,138(5):595-603.
[2] 王發強,劉崇新,逯俊杰.四維系統中多渦卷混沌吸引子的仿真研究[J].物理學報,2003,52:25-33.
[3] 陳仕必,曾以成,徐茂林.用多項式和階躍函數構造網格多渦卷混沌吸引子及其電路實現[J].物理學報,2011,60(2):3071-3077.
[4] 湛龍,彭海軍,王德石.一類多渦卷混沌系統構造方法研究[J].物理學報,2008,57:3337-3341.
[5] 周平,趙鵬. 混沌系統的驅動-響應同步[J].重慶大學學報,2002,15(12):77-79.
[6] SINHA S C , HENRICHS J T ,RAVINDRA B. A general approach in the design of active controllers for nonlinearsystems exhibiting chaos[J] International Journal of Bifurcation and Chaos,2000,10 (1):165-178.
[7] 王興元,朱全龍,張曉鵬.基于三種方法的新Lü混沌系統的同步[J]. 物理學報,2011,60(10):100510-1-9.
[8] PYRAGAS K. Continuous control of chaos by self-controlling feedback [J].Physics Letters A,1992,170(6):421-428.
[9] 曹鶴飛,張若洵. 基于滑模控制的分數階混沌系統的自適應同步[J].物理學報,2011,60(5):050510-1-5
[10] 潘光,魏靜.一種分數階混沌系統同步的自適應滑模控制器設計[J].物理學報,2015,64(4):040505-1-6.
[11] 孫寧,張化光,王智良. 基于分數階滑模面控制的分數階超混沌系統的投影同步[J].物理學報,2011,60(5):050511-1-7.
(責任編輯:石紹慶)
Linearfeedbackslidingmodecontrollerforsynchronizationoffractionalmulti-scrollchaoticsystem
QI Ping,YU Hai Dong,LIU Shuang,YUE Li Juan
(School of Physics,Northeast Normal University,Changchun 130024,China)
In this paper,the fractional chaotic system is extended from integer order chaotic system.We design a linear feedback sliding mode controller based on the theory of learning feedback control and the theory of sliding mode control.The synchronization of the fractional multi-scroll chaotic systems is achieved.The synchronization time of the fractional multi-scroll chaotic systems is shortened by linear feedback sliding mode control law.The result of numerical simulation shows the effectiveness of the proposed controller law.
fractional multi-scroll chaotic system;linear feedback;linear feedback synovial;chaos synchronization
1000-1832(2017)03-0083-05
10.16163/j.cnki.22-1123/n.2017.03.018
2016-09-02
國家自然科學基金資助項目(10847110),吉林省自然科學基金資助項目(201115008).
祁平(1986—),女,碩士研究生;通信作者:岳麗娟(1963—),女,博士,教授,主要從事非線性混沌控制與同步研究.
TP 271 [學科代碼] 120·20
A
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32