基于STM32F103的風力擺控制系統(tǒng)設計
2017-09-18 07:43:44賀婭莉郭艷花高榮登
智能計算機與應用 2017年4期
賀婭莉++郭艷花++高榮登

摘要: 本系統(tǒng)采用STM32F103單片機為核心控制系統(tǒng),采用模塊化設計方案,整個系統(tǒng)包含控制系統(tǒng)模塊、電機驅動模塊、角位移傳感器模塊、電源模塊等。用角位移傳感器MPU6050采集風力擺擺頭的角度及位置,通過I2C總線傳輸發(fā)送到主控系統(tǒng)中,采用LCD12864顯示采集到的信息,通過PID算法進行數(shù)據(jù)處理,產生相應的PWM信號,發(fā)送給相應的直流風機,控制直流風機實現(xiàn)自由擺動,從而畫出直線、圓等軌跡。測試結果表明,該系統(tǒng)運算速度快,抗干擾能力強。
關鍵詞: 風力擺; 角位移傳感器MPU6050; PID算法
中圖分類號:TP273
文獻標志碼:A
文章編號:2095-2163(2017)04-0076-03
0引言
風力擺系統(tǒng)是一個典型非線性、不穩(wěn)定的系統(tǒng)。在經典控制理論和現(xiàn)代控制理論中的應用也是該領域具有代表性的基礎研究課題之一。而將其作為實驗裝置時可以測試控制理論,檢驗控制方法和思路。這些控制研究成果都能廣泛應用于一般工業(yè)與工程控制,所以對于風力擺控制系統(tǒng)的研討設計則將呈現(xiàn)重要的理論探索意義和實際應用價值。本文即針對這一項目內容給出如下分析論述。
1系統(tǒng)硬件設計
1.1控制器模塊比較與選擇
1)方案一:采用STC89C51單片機作為控制器。STC89C51價格低廉,結構簡單,且資料豐富;但是51單片機系統(tǒng)資源有限,8位控制器,運算能力有限,無法達到較高的精度,需要外接大量外圍電路,增加了系統(tǒng)復雜度,達不到系統(tǒng)要求。
2)方案二:采用MSP430G2553單片機作為系統(tǒng)控制器。MSP430G2553單片機內部集成精度高,是16位單片機,但其外部接口較少,運算速度相對較慢,達不到要求。
3)方案三:采用STM32F103單片機作為系統(tǒng)控制器。STM32F103單片機是32位單片機,內部集成度高,擁有大量外部接口,運算速度高,能夠滿足問題中對數(shù)據(jù)的快速采集和處理需求。
綜合以上3種方案,研究中選擇方案三中的STM32F103單片機。
1.2角度傳感器模塊比較與選擇
1)方案一:采用編碼器根據(jù)脈沖數(shù)計算出角度,但是編碼器體積較大,安裝不方便,有突變現(xiàn)象,容易導致計算錯誤,故不能滿足題目要求。
2)方案二:采用ENC陀螺儀,ENC陀螺儀能輸出一個和角速度成正比的模擬電壓信號,響應速度快,驅動電壓和功耗較低。但是容易發(fā)生溫漂,噪聲較大,穩(wěn)定性較差。
3)方案三:采用MPU6050三維角度傳感器,MPU6050集成了3軸陀螺儀,3軸加速度計,以及一個可擴展的數(shù)字運動處理器DMP,可輸出數(shù)字量,穩(wěn)定性極佳,測量精度高。
綜合比較以上方案,研究中選擇方案三中的MPU6050傳感器作為系統(tǒng)的角度傳感器。
1.3驅動模塊的比較與選擇
1)方案一:采用L298驅動,L298是專用驅動集成電路,屬于H橋集成電路,內部包含4通道邏輯驅動電路。但其輸出電流不能超過4A,比較容易發(fā)熱,不能符合題目的較大電流。
2)方案二:采用互補硅功率達林頓管驅動,采用該方法電路連接比較簡單,穩(wěn)定性好,成本低廉,但不足之處是由于使用分立元件,反應速度較慢,不能符合題目對軸流風機快速反應的要求。
3)方案三:采用電子調速器驅動,可根據(jù)控制信號調節(jié)電動機的轉速,操作方便,具有過溫、過壓、欠壓、過流及短路保護的功能。具有極好的驅動能力,反應靈敏,能夠很好地滿足題目的要求。
綜合以上3種方案,研究中選擇方案三中的電子調速器驅動。至此可得,系統(tǒng)整體框圖如圖1所示。
2控制原理
PID控制算法中,微分作用是控制器的輸出與偏差變化的速度成比例,能對克服對象的容量滯后有顯著效果,在比例基礎上加入微分作用,使穩(wěn)定性提高,再加上積分作用,可以消除余差,因此PID控制算法適用于控制質量要求很高的控制系統(tǒng)。使用PWM(脈寬調制)方法,可以方便地改變加給電機電樞的平均電壓的大小。改變控制信號的占空比就可以改變電機的轉速。具體分析如下:
error=set_angle-anggle_one[JY](1)
其中,error為擺桿的角度差,set_angle對應擺桿平衡時的角度值,anggle_one對應擺桿當前的角度值。在此基礎上,可進一步得到:
up=kp×error[JY] (2)
其中, kp為比例調節(jié)系數(shù),通過公式可以看出,增大kp即可增強角度差的作用,從而提升系統(tǒng)的強硬速度,使擺桿迅速達到直立的狀態(tài)。由此,研究求得ud的數(shù)學表述如下:
ud=kd×(angleone-anggle_one_old)[JY](3)
其中,anggle_one_old對應擺桿上一次采集到的角度值,kd為微分調節(jié)系數(shù),angleone-anggle_one_old對應角度的變化值,因此可知,調節(jié)kd可以改善系統(tǒng)的動態(tài)性能。聯(lián)立上式,可得pwm的運算公式為:
pwm=up-ud[JY](4)
把pwm的值給電機即可改變電機的轉速,使擺桿的角度改變。最終實現(xiàn)擺桿的站直并穩(wěn)定。
3系統(tǒng)軟件設計
3.1程序功能描述
主要是通過STM32F103單片機控制系統(tǒng)實現(xiàn)。
3.2主體程序設計
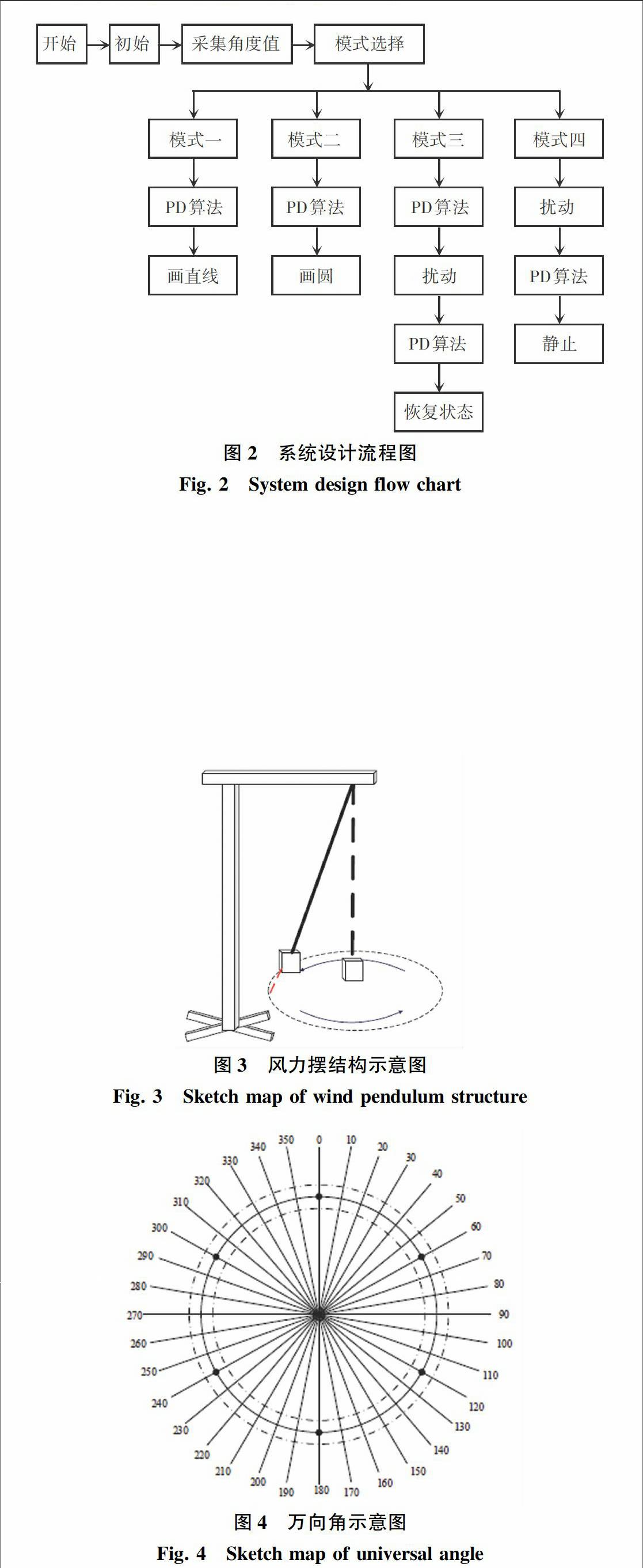
本測量裝置主要指標是通過MPU6050采集數(shù)據(jù),單片機STM32F103進行數(shù)據(jù)處理,通過按鍵來提供參數(shù)整定,從而調控各個風機的轉速,使激光筆能夠滿足畫出直線和圓形等各類要求。程序設計流程則如圖2所示。
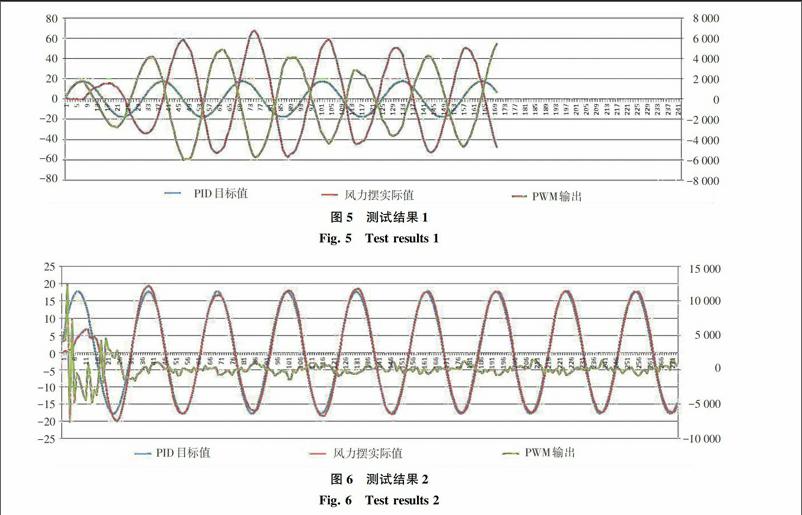
4實驗測試與分析endprint
本次系統(tǒng)結構示意如圖3所示。在系統(tǒng)測試中,采用的是萬向節(jié)為軸轉中心,具體如圖4所示,同時,以角度傳感器為反饋模塊,以10°為一個分度值,進行角度的測量,從而察證最終畫得的直線、圓圈的處理結果。
5結束語
綜上分析,采用PID控制算法,簡單,響應速度快,選用合適的PID值,可以在一個周期內快速跟蹤正弦波運動。但由于測試工具和機械結構不均勻,會使擺角計算的角度與實際的角度存在偏差,造成系統(tǒng)結果呈現(xiàn)一定誤差。
參考文獻:
[1]侯祥林,顧立忠,徐心和. 圓軌單級倒立擺擺起過程控制[J]. 控制與決策,2003,18(4):483-486.
[2] 楊光祥. STM32單片機原理與工程實踐[M]. 武漢:武漢理工大學出版社,2013 .
[3] 黃友銳,曲立國. PID控制器參數(shù)整定與實現(xiàn)[M]. 北京:科學出版社,2010.
[4] 譚浩強. C語言程序設計[M]. 3版. 北京:清華大學出版社,2010.
參考文獻:
[1]MA Yingjuan. Independence, cooperation and accountability——Tracing and exploring China's reformation of food safety regulatory system[J]. Journal of Hebei University, 2015,40(1):38-45.
[2] 李金峰. 流通環(huán)節(jié)食品安全追溯體系的構建研究[J]. 企業(yè)導報, 2015(23):132-133.
[3] 劉勝達, 王知強, 徐淑新,等. 智慧城市食品安全追溯系統(tǒng)研究[J]. 智能計算機與應用, 2014, 4(1):85-87.
[4] 王愛晶. 基于供給側的食品安全追溯體系源頭風險防控對策分析[J]. 物流技術, 2016, 35(8):56-58,133.
[5] 鄭火國. 劉世洪, 胡海燕. 食品安全追溯鏈構建研究[J]. 中國農業(yè)科技導報, 2016, 18(1):81-86.
[6] MIEWALD C, HODGSON S, OSTRY A. Tracing the unintended consequences of food safety regulations for community food security and sustainability: Small-scale meat processing in British Columbia[J]. Local Environment, 2015, 20(2):237-255.
[7] 張興華. 基于物聯(lián)網(wǎng)技術的食品安全溯源系統(tǒng)開發(fā)[J]. 北方經貿, 2015(9):71.
[8] 黃全高. 基于RFID技術的蔬菜食品安全溯源系統(tǒng)研究[J]. 科學中國人, 2015(11Z):6-7.
[9] 方華峰. 物聯(lián)網(wǎng)技術在食品安全追溯管理中的應用與發(fā)展[J]. 電子技術與軟件工程, 2014(7):35-36.
[10]DONG X, JIE X, PIN W. Logistics tracings in food safety emergencies based on the RFID technology[J]. Advance Journal of Food Science & Technology, 2015, 7(2):94-98.endprint
猜你喜歡
工業(yè)設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
電子制作(2019年13期)2020-01-14 03:15:28
裝備制造技術(2019年12期)2019-12-25 03:06:46
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
電子制作(2018年12期)2018-08-01 00:48:04
家庭影院技術(2017年9期)2017-09-26 03:41:45
