基于Kinect控制的類人機器人的運動研究
2017-09-18 03:14:50楊大勇
淮北職業技術學院學報 2017年5期
楊大勇
(淮北工業與藝術學校 教務處,安徽 淮北 235000)
基于Kinect控制的類人機器人的運動研究
楊大勇
(淮北工業與藝術學校 教務處,安徽 淮北 235000)
基于 Kinect 控制技術分析了類人機器人的運動狀況:整個過程包括硬件機器人運動分層控制平臺的搭建、基于分層控制理論下機器人運動建模、基于機器人運動研究的體感人機交互系統的設計。根據現已存在的仿真平臺驗證了該理論的可行性。
類人機器人;機器人運動建模;分級控制;人機交互系統
一、導言
仿人機器人一般指具有雙手、雙腿、雙足等人類特征可自由移動的機器人,它集多種高尖端技能和前沿學科于一體,一定程度上表征一個國家的創新實力與科技水平。日本本田公司于1997 年 10 月推出了仿人形機器人 P3,美國麻省理工學院研制出仿人形機器人科戈(COG)。雖然目前仿人機器人可用于軍事、醫療、勘探等多個領域,但對仿人機器人的研究大多仍停留在實驗室內,現在研發的仿人機器人對周設環境的感知與適應等多種能力仍待提高。可見,仿人機器人發展前景十分廣闊。
二、硬件機器人運動分層控制平臺的搭建
本論文描述的機器人系統采用分級控制方式。下層運動控制采用實時性比較好的運動控制板控,以實時控制機器人的位置與速度,上層采用裝有操作系統的主控制板。上層主要負責圖像信息采集處理、路徑規劃以及信息集成等工作。機器人的硬件結構如圖所示:
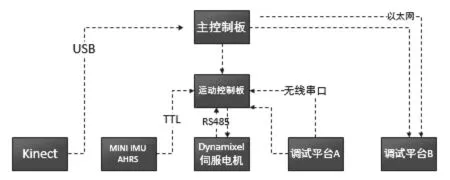
圖1 硬件架構
三、基于分層控制理論下機器人運動建模
(一)ZMP移動軌跡設計
根據ZMP穩定理論,當零力矩點落在機器人腳掌范圍內,機器人可以較為穩定地行走。因此最簡單的思路就是直接設計ZMP在每個步行單元都處在支撐點,即每個步行單元的原點位置,因此有
(1)
(2)
其中Zc是身體質心與運動約束平面的截距。
其中該次運動的起點與終點一般情況下是較為確定的。這就為運動方程的得出提供了約束條件。
在步行單元[0,T]內,設身體的初始值為(x0,y0),終止值為(x1,y1),則可解得身體的運動軌跡如下:
(3)
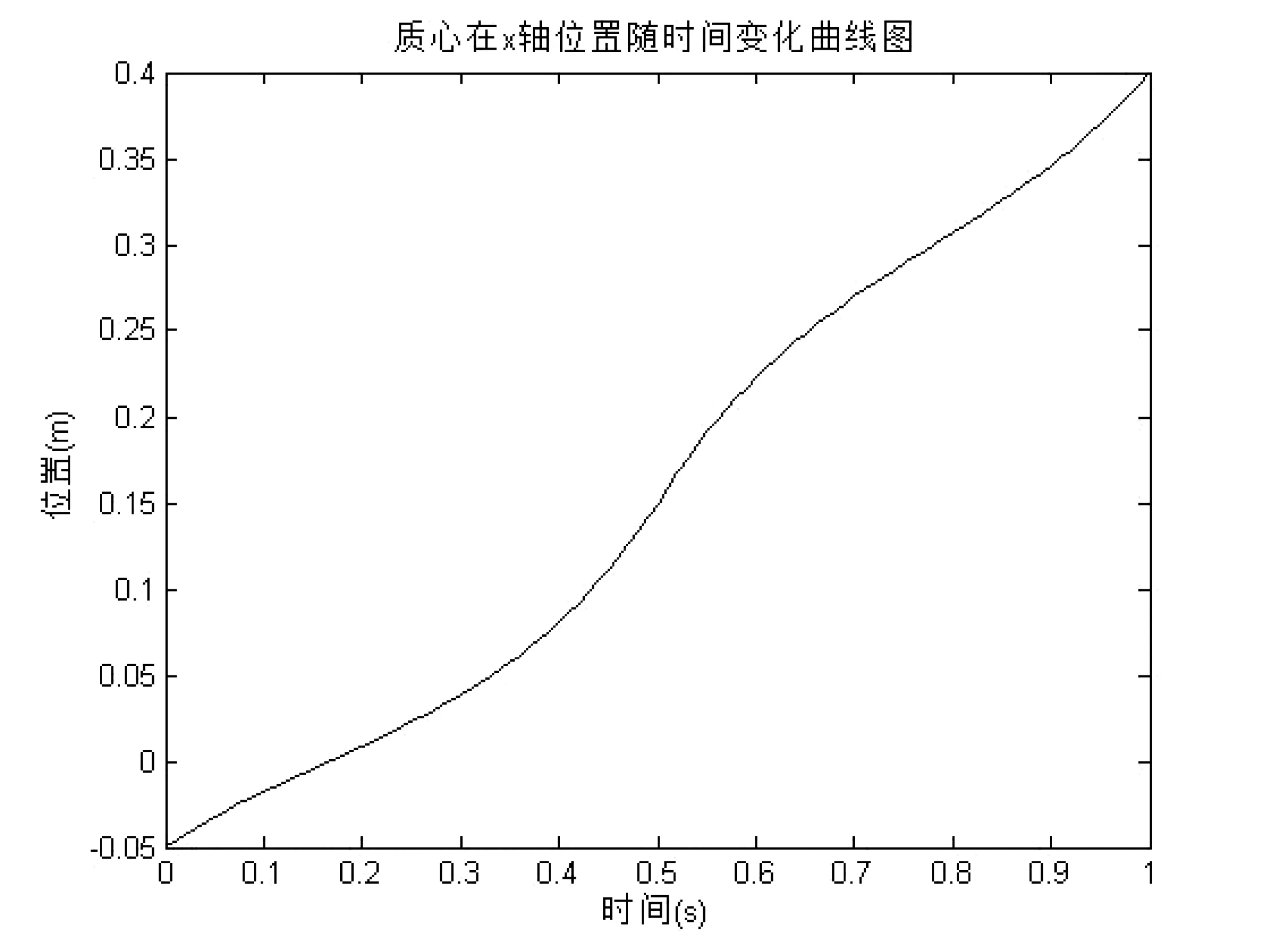
圖2 質心在x軸位置隨時間變化曲線
(4)
質心在x軸位置隨時間變化曲線如圖2所示,而下一步身體的起始位置即為上一步行單元的終止位置,即
(5)
(二)雙腳的運動軌跡
上面討論了身體的運動軌跡,然后還要獲得腳的運動軌跡,才能通過逆運動學得到下肢關節的運動角度。對于一個步行單元[0,T],設在[0,t1],[T-t,1T]時間內為雙腳支撐階段。
對于支撐腳,在[0,T]內有:
(6)
由于在[0,t1],[T-t,1T]時間內為雙腳支撐階段,故這段時間內擺動腿也是靜止的:
(7)
(8)
因此可以設計如下曲線:
(9)
計算該曲線在t=0,t=T時刻的位置,速度,加速度得:f(0)=ps,f(T)=pe,f′(0)=0,f′(T)=0,f″(0)=0,f″(T)=0符合要求。因此對于時間段[t1,T-t1],可以使用該曲線生成x,y兩個方向的運動曲線如下:
(10)
取S(n)=0.02,S(n-1)=-0.02,T=40,用MATLAB畫出雙足步行x方向運動仿真曲線如圖3所示:
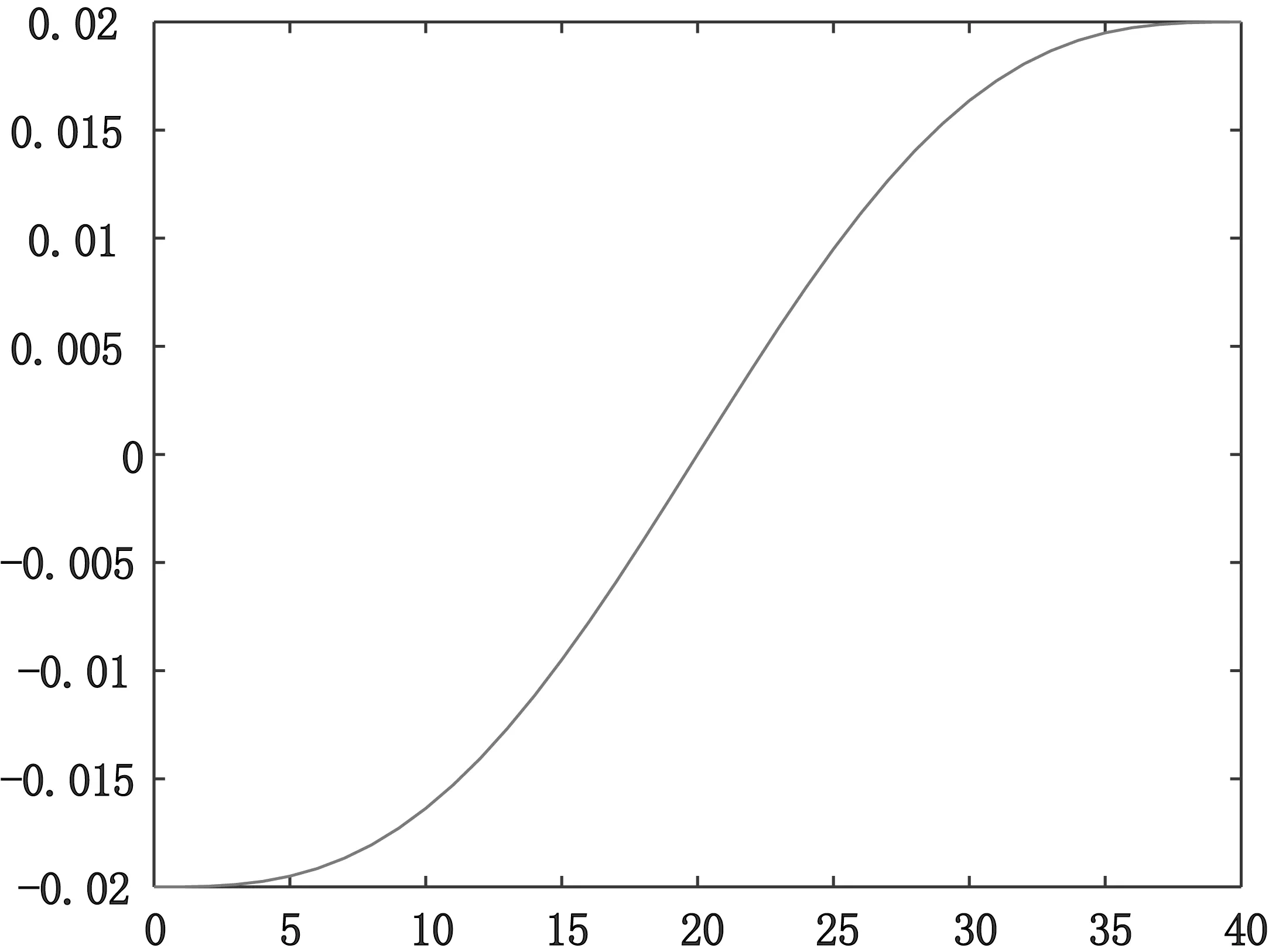
圖3 雙足步行x方向運動仿真曲線
由圖3可以看出,該曲線隨時間的變化率和所期望的值是相同的。
對于擺動腿在z軸方向上的運動軌跡,需要指定抬腳高度h,并將時間分為抬腳階段[t1,t1+(T-2t1)ρ]和落腳階段[t1+(T-2t1)ρ,T-t1],其中0<ρ<1。根據式(6-11)設計運動曲線如下:
(11)
取h=0.06,T=40,ρ=0.5,用MATLAB畫出抬腳運動仿真曲線如圖4所示:
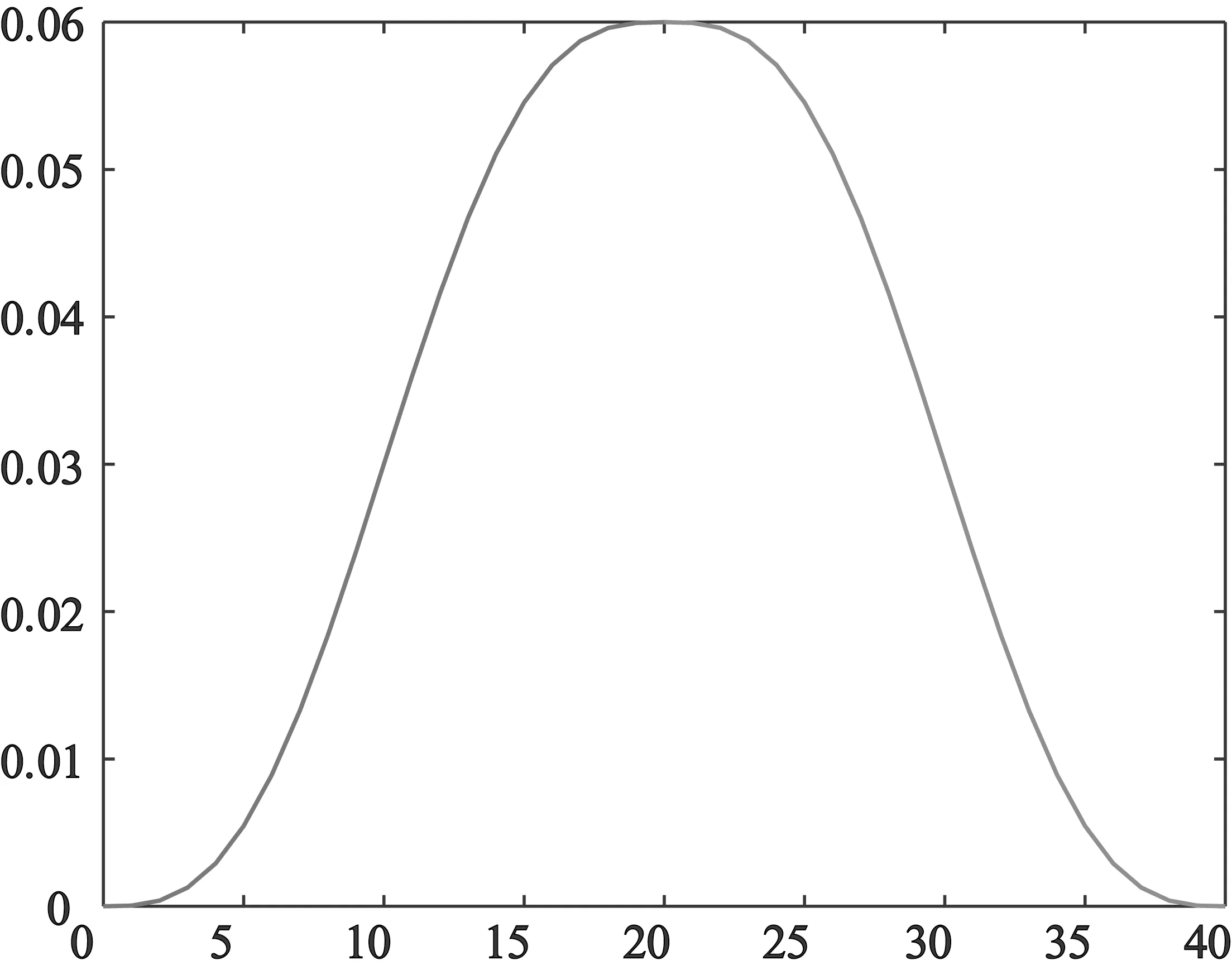
圖4 抬腳運動仿真曲線
由圖4可以看出,該曲線隨時間的變化率和所期望的值是相同的。
這樣便得到了一個步行單元內的雙腳軌跡,再結合身體軌跡,就可以由逆運動學計算出下肢每個關節的運動角度。
四、基于類人機器人運動研究的體感人機交互系統設計
(一)系統結構
本論文中研究的體感人機交互系統更主要包含三個部分,一開始的是基于Kinect的人體姿態采集部分,姿態采集部分將包含了人體骨骼點信息的數據發送到數據處理端;第二個部分,稱為姿態識別。在數據處理端進行濾波,計算和姿態識別工作。第三部分,稱為動作控制。經過數據轉換處理,將姿態數據轉換成機器人控制數據,然后將數據送到仿真平臺和機器人身上,整個系統結構如圖5所示:
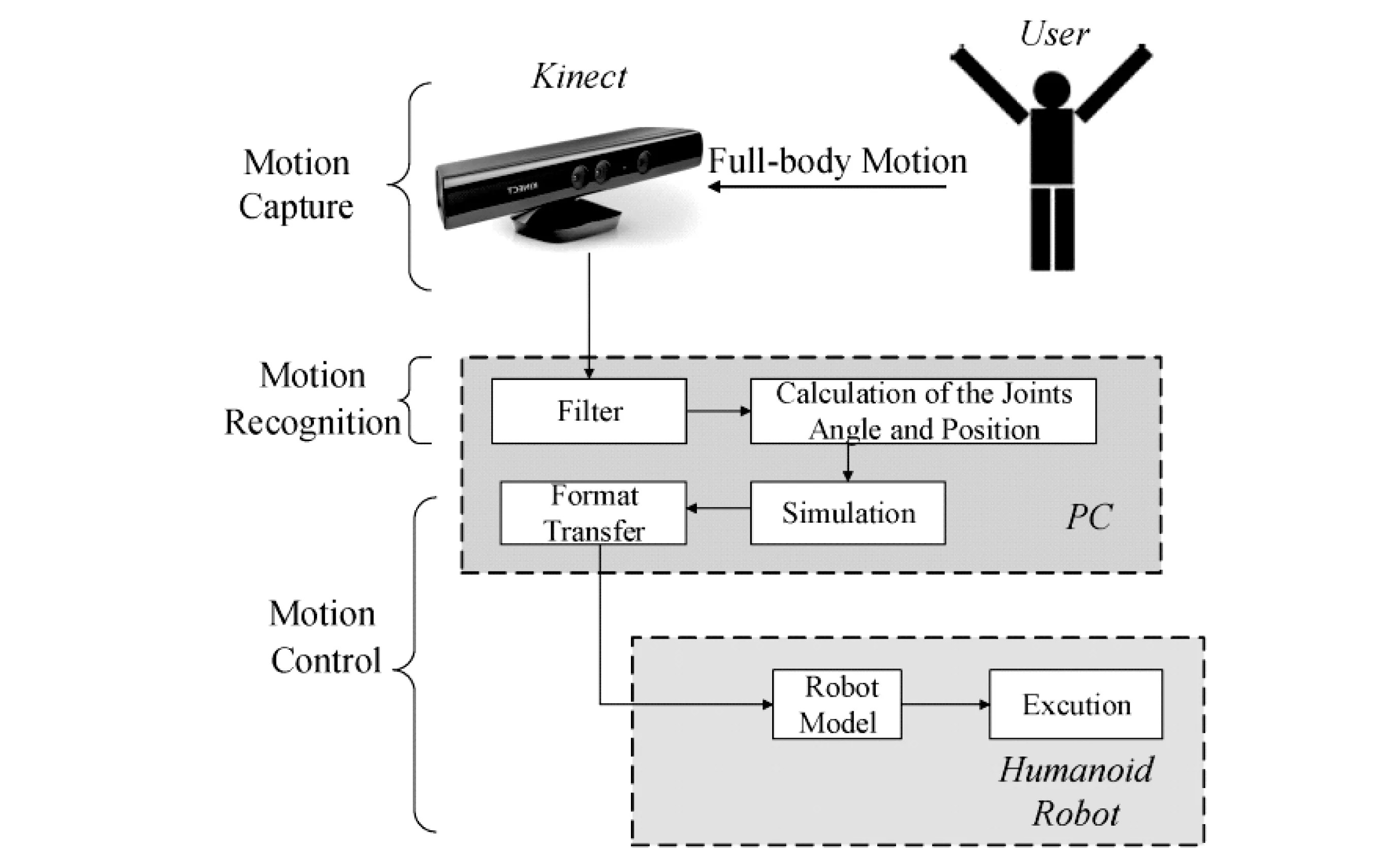
圖5 系統結構注:motion capture:動作捕捉;motion recognition:動作識別;filter:過濾;calcuation of the joints angle and position:同時計算角度和位置;format transfer:格式轉換;simulation:仿真;Robot model:機器人模型;excution:執行;humanoid robot:類人機器人
(二)姿態識別
1.粒子濾波器
微軟官方提供的Kinect SDK可以捕捉關節和他們的軌跡。官方的Kinect SDK提供和固定的并且黑箱式的姿態追蹤模式。本文論述平臺采用的追蹤模型采用了這個固定的追蹤模式。在這個模式下,Kinect會采集人類身體中的20個骨骼關節點。但是一個很重要的問題是,這些關節點由于圖像處理的誤差原因,他們并不是非常的穩定,所以這些數據的變化并不是一個連續的,也不是一個精確的結果。他們會在正確結果的附近以一個類似高斯分布的方式出現。所以,考慮使用粒子濾波器來解決這個問題。
2.關節角計算和姿態識別
(1)上半身模型: 上身骨骼模型的關節角是一個用來可以正確描述示教者的運動姿態的非常重要的參數。根據基本的線性代數的知識和人體上身模型如圖6所示:
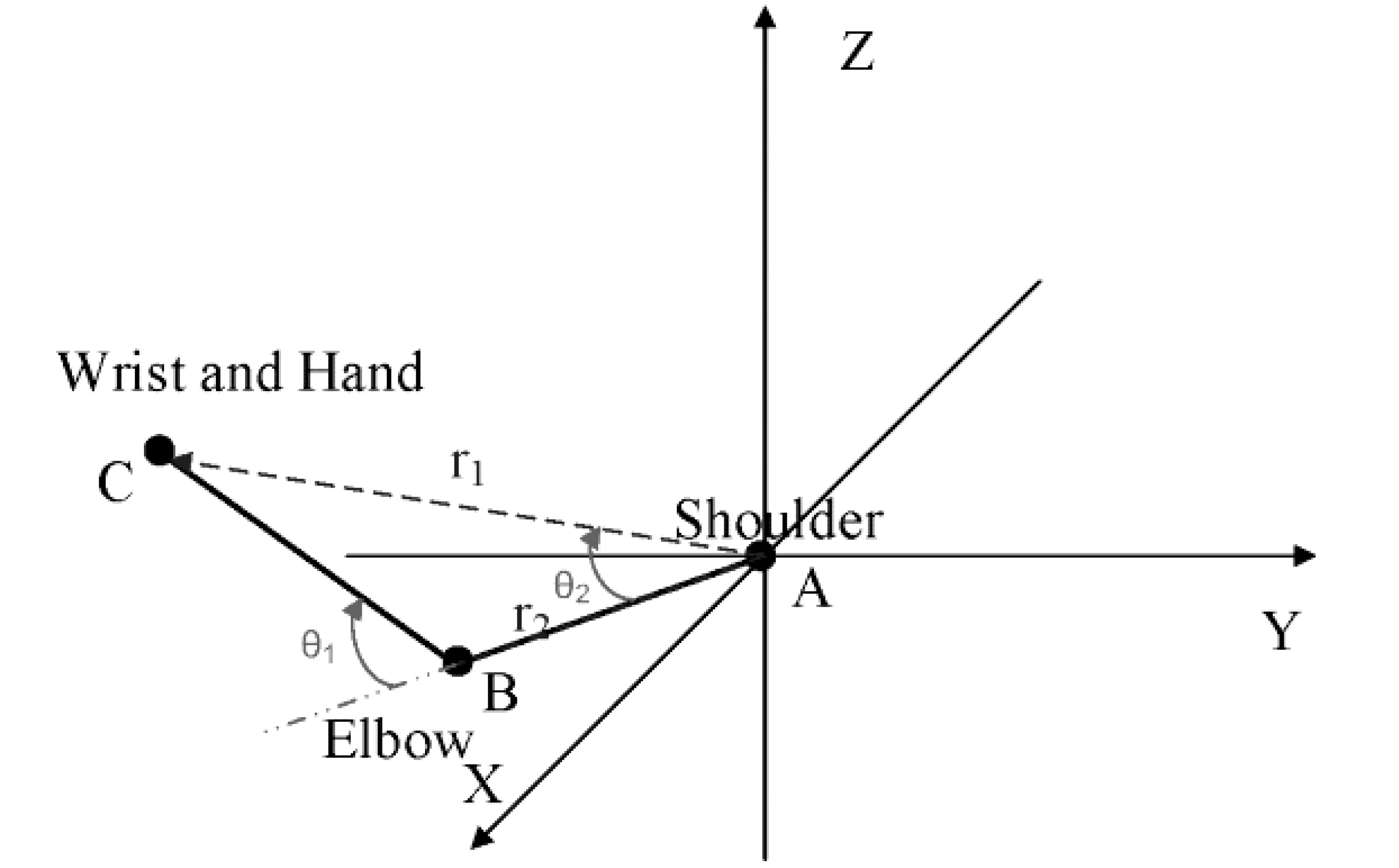
圖6 上半身模型

注:wrist and hand:手腕和手; elbow:肘部
我們能夠容易的計算出上半身的關節的角度,從而識別出上半身的姿態。
(2)下半身模型: 因為一邊模仿人類動作的一邊來平衡機器人的下肢運動平衡是一個非常困難的工作。我們采用了有限自動機(FSM)來實現一個類似于上半身模型的姿態識別算法。這個下半身算法如圖7。在下半身,關節的歷史姿態是另一個非常重要的參數。將這個參數和人體關節骨骼角度結合,能夠提供給我們足夠的信息來識別出不同的動作。
根據關節角度信息和關節歷史姿態信息,通過狀態機的相關準則我們可以正確的識別出人體姿態并計算出機器人控制數據。圖8描述了有限狀態機的流程和姿態識別過程。
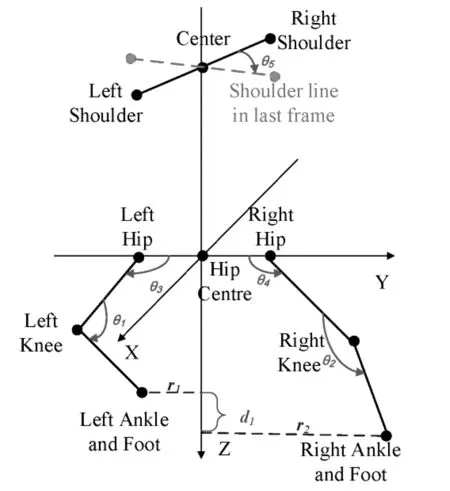
圖7 下半身模型
(注:hip:臀部;ankle:踝關節;knee:膝蓋;shoulder line in last frame:肩線最后一幀;left:左;center(centre):中心;right:右(僅作部分標注))
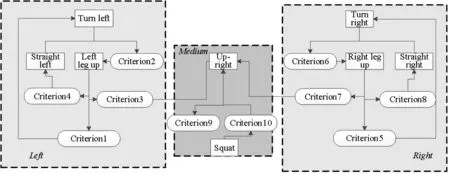
圖8 下半身姿態識別的有限狀態機的結構
(注:criterion:準則,規律;squat:蹲坐)
五、 基于上述理論的機器人仿真模擬及平臺支持
目前機器人仿真軟件有很多,較為專業的有 robotworks、robotcad,還有就是各機器人廠家開發的專用仿真軟件,如 ABB 的 robotstudio,KUKA 的SimPro,MOTOMAN 的 motosim 等等。
考慮到本次模擬對仿真要求不高,擬采用 openGL 進行三維仿真模擬。 OpenGL 是一個開放的三維圖形(二維亦可)軟件包,可跨平臺的編程接口規格的專業的圖形程序接口,是一個功能強大,調用方便的底層圖形庫。而且其可較為方便地移植于不同的平臺之間,提供了復雜三維物體、曲線、曲面等的繪制函數。顯然,這些功能足夠本平臺使用,具有較高可實施性。
六、仿真機器人相關研究成果
本文通過對類人機器人的運動建模,從而達到研究基于Kinect 控制的類人機器人運動情況的目
的。從對人體數據采集、機器人架構設計、運動學分析、步態規劃和穩定性控制進行了較為深入的研究,主要研究結果包括:
(一)通過對類人機器人的仿人程度進行分析,針對機器人的功能需求,提出了分層模塊化的軟硬件設計思路。在軟件結構上,由上至下將其分為上層機、下層機,并著重搭建了下層機的動作規劃層和穩定控制層的軟件平臺和程序整體架構。配合軟件結構分層,將硬件結構上劃分為圖像采集器,主控制板,運動控制板,以及其他機器人硬件。
(二)將圖像采集的數據進行處理,并在此基礎上進行了機器人的運動學建模。
(三)基于ZMP穩定性理論,對機器人的步行進行了離線的步態生成,著重分析了支撐腳切換瞬間的速度與加速度不連續的問題,并使用Matlab仿真驗證了此算法的合理性。
(四)基于對類人機器人的運動研究,探討了相應的體感人機交互系統設計。
七、結語
本文針對進一步提高類人機器人的仿真程度,提出了分層模塊化的軟硬件設計思路,并用現有平臺進行仿真模擬,驗證了該理論的科學性以及可行性。相信該仿真技術一定會走出實驗室,必定有巨大的發展前景。
[1] 梶田秀司.仿人機器人[M].管貽生,譯.北京:清華大學出版社,2007:15-32.
[2] M·伍科布拉托維奇.步行機器人和動力學假肢[M].北京:科學出版社,1983:11.
[3] Erica Naone.Microsoft Kinect:How the Device Can Respond to Your Voice and Gestures[J].Pioneering with Science and Technology,2011(4):82-83.
[4] 狄海進.基于三維視覺的手勢跟蹤及人機交互中的應用[D].南京:南京大學,2011.
[5] 余濤.Kinect應用開發實戰:用自然的方式與機器對話[M].北京:機械工業出版社,2012.
[6] 張利格,畢樹生,高金磊.仿人機器人復雜動作設計中人體運動數據提取及分析方法[J].自動化學報,2010 (1):107-112.
[7] 毛勇,王家廞,賈培發,等.雙足被動步行研究綜述[J].機器人, 2007 (3): 274-280.
責任編輯:力 草
2017-05-26
楊大勇(1970—),男,安徽淮北人,助理講師,研究方向:多媒體技術應用。
TP242.6
:A
:1671-8275(2017)05-0141-04