測角網間接平差原理及應用
2017-09-16 04:13:33陳林
山西建筑 2017年23期
陳 林
(湖南省有色地質勘查局二一七隊,湖南 衡陽 421001)
測角網間接平差原理及應用
陳 林
(湖南省有色地質勘查局二一七隊,湖南 衡陽 421001)
介紹了測量平差中測角網間接平差誤差方程式的列立原則和方法,得出了列立角度誤差方程式的關鍵是建立角度所對應的兩個方向的方位角改正數方程,并對方位角改正數方程給出了說明,以供參考。
三角網,精度,坐標,中誤差
1 概述
按照三角網中所具有的起算數據的多少,三角網又可分為:自由三角網、獨立三角網和附合三角網。起算數據個數少于必要起算數據的三角網稱為自由三角網;等于必要起算數據個數的三角網稱為獨立三角網;多于必要起算數據個數的三角網稱為附合三角網。三角網進行間接平差時,通常以網中待定點的坐標為未知參數,通過平差直接求得待定點的坐標平差值,因而這種平差法亦稱為“坐標平差”。
2 測角網的坐標平差基本公式
如圖1所示,j,h和k為控制網中的待定點,L為角度觀測值。選擇待定點j,h和k的坐標為未知參數,相應的近似值為:
(1)
觀測角度的誤差方程就是列立觀測角度與坐標參數之間的函數關系。
由圖1可得:
(2)

(3)
將式(3)按泰勒級數展開,取至一次項,略去二次及以上項,得線性化后的式為:
(4)
或:

式(4)左邊為方位角的改正數,設為δαjk,則有:
(5)
(6)
(7)
同理,可得:
(8)
(9)
將以上各式代入式(5),得:
(10)
式(10)稱為方位角改正數方程。圖2為在高級點A,B下加密新點P1,P2的三角網,網中等精度獨立觀測了9個角度值L1,L2,…,L9,觀測值見表1。起算數據見表2。試以P1,P2點坐標為未知數,按照間接平差法求:1)P1,P2點的坐標平差值;2)P1,P2點的點位中誤差。
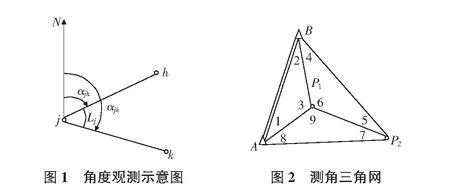
表1 觀測數據

編號觀測角度值編號觀測角度值編號觀測角度值L123°45'13.4″L430°52'42.5″L733°40'52.6″L228°26'5.6″L542°16'38.9″L820°58'22.7″L3127°48'39.0″L6106°50'41.2″L9125°20'39.8″

表2 起算數據

1)根據已知點坐標以及觀測值計算待定點P1,P2的近似坐標,結果見表3。

表3 近似坐標 m
2)計算待定邊的近似邊長S0、近似坐標方位角α0、誤差方程的系數a,b,結果見表4。
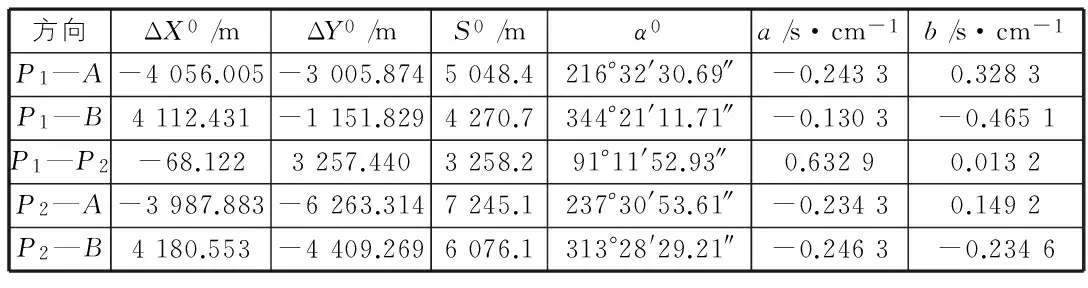
表4 方向系數
3)按公式計算誤差方程常數項-f,根據誤差方程系數a,b(見表4),按公式計算誤差方程各系數項即可組成誤差方程,結果列入表5。

表5 誤差方程
4)組成和解算法方程。因為是等精度獨立觀測,故可設觀測值權陣為單位陣,即P=I。
法方程形式:

系數陣為:
常數項為:
法方程解為:
解得參數改正數代入誤差方程可得觀測值改正數解:

表6 坐標平差值 m
6)計算點位中誤差。單位權中誤差估值為:
未知數平差值的協因數陣為:

待定點坐標平差值的中誤差為:

點位中誤差為:
3 結語
通過公式推導可知,三角網的觀測對象主要是角度和邊長。因此三角網間接平差時先要列立各觀測角度和邊長的誤差方程式,然后組成并解算法方程,求得未知參數(待定點坐標)的平差值,最后進行精度評定。
[1] 張坤宜.交通土木工程測量[M].武漢:武漢大學出版社,2014.
[2] GB 50026—93,工程測量規范[S].
[3] 潘正風.數字測圖原理與方法[M].武漢:武漢大學出版社,2015.
Theprincipleofindirectadjustmentofanglemeasuringnetanditsapplication
ChenLin
(The217TeamsofNonferrousGeologicalProspectingBureauofHunanProvince,Hengyang421001,China)
Given the measurement adjustment angle measurement network adjustment principle and method of error equation is established. The key point of the established error equation is the two direction of the perspective of the establishment of the corresponding azimuth correction equation. Some directions of azimuth correction equation are also given, for reference.
triangulation net, accuracy, coordinate, root mean square error
1009-6825(2017)23-0192-03
2017-06-08
陳 林(1981- ),男,工程師
TU198.2
:A
