基于串級(jí)模糊自適應(yīng)PID的起重機(jī)防搖控制研究
2017-09-15 06:08:14諶海云
制造業(yè)自動(dòng)化 2017年8期
關(guān)鍵詞:實(shí)驗(yàn)模型
劉 斌,諶海云
(西南石油大學(xué) 電氣信息學(xué)院,成都 610500)
基于串級(jí)模糊自適應(yīng)PID的起重機(jī)防搖控制研究
劉 斌1,諶海云1
(西南石油大學(xué) 電氣信息學(xué)院,成都 610500)
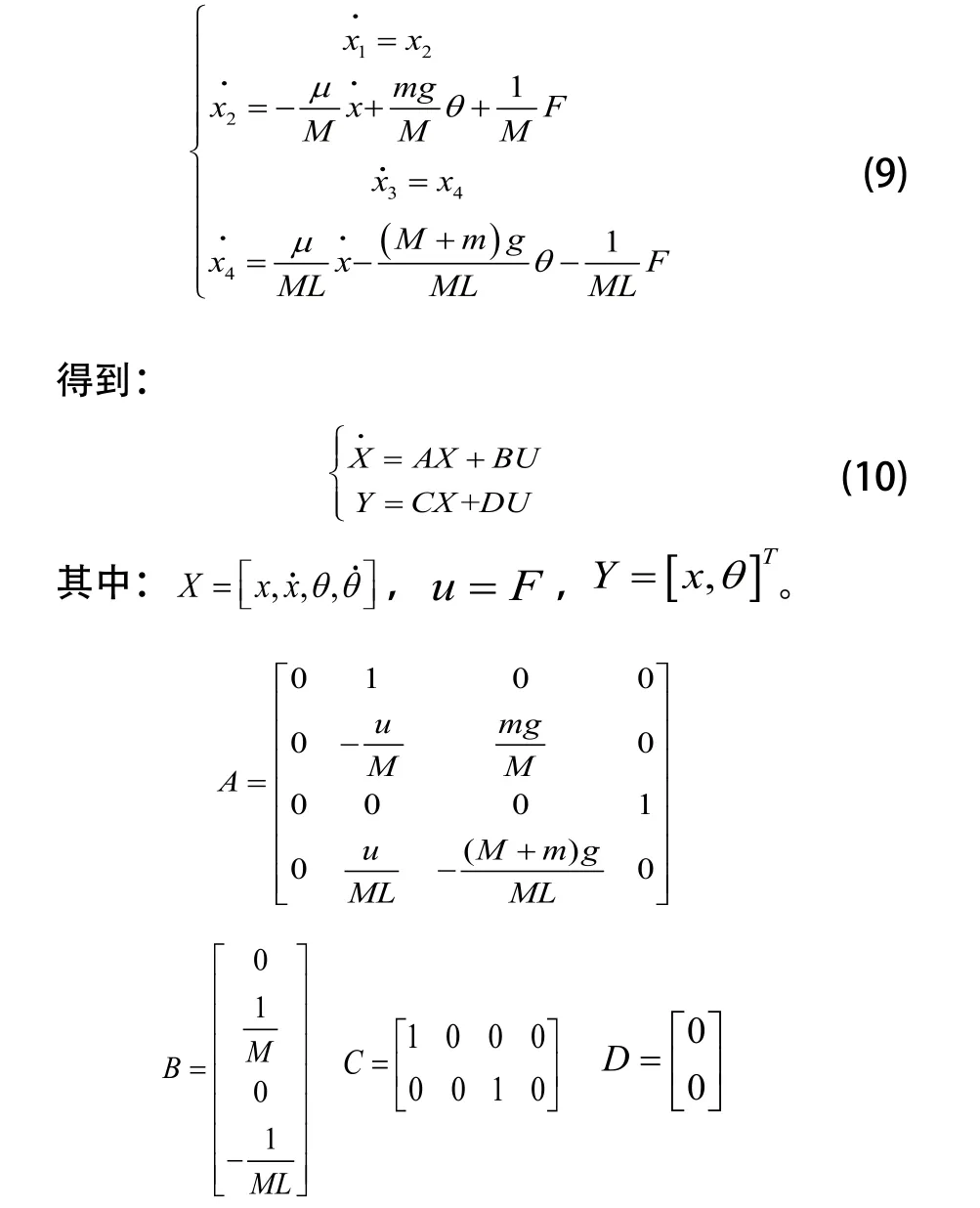
以橋式起重機(jī)的吊重系統(tǒng)為研究對(duì)象,利用拉格朗日方程建立吊重系統(tǒng)的狀態(tài)空間模型,在Matlab/Simulink中建立控制小車(chē)位移和吊重?cái)[角的串級(jí)PID防搖控制仿真模型,在內(nèi)環(huán)引入模糊自適應(yīng)PID控制對(duì)串級(jí)PID控制模型進(jìn)行改進(jìn)。仿真結(jié)果顯示引入模糊自適應(yīng)PID控制后,防搖控制系統(tǒng)的控制效果更好,尤其對(duì)擺角的控制,超調(diào)減小,調(diào)節(jié)時(shí)間加快。最后,利用貝加萊的防搖控制系統(tǒng)實(shí)驗(yàn)平臺(tái)對(duì)模糊自適應(yīng)PID防搖控制系統(tǒng)進(jìn)行驗(yàn)證。
橋式起重機(jī);Matlab/Simulink;串級(jí)PID;模糊自適應(yīng)PID;貝加萊
0 引言
橋式起重機(jī)是港口運(yùn)輸、裝備制造等行業(yè)重要的裝載工具,但在運(yùn)行過(guò)程中小車(chē)的加、減速以及風(fēng)力等外界干擾的影響都會(huì)導(dǎo)致吊重貨物的擺動(dòng)。文獻(xiàn)[1]綜述了防搖控制系統(tǒng)的發(fā)展,并介紹人工防搖、機(jī)械防搖和電子防搖三種常用的防搖方法。文獻(xiàn)[2]中對(duì)橋式起重機(jī)吊擺系統(tǒng)和變頻調(diào)速系統(tǒng)進(jìn)行數(shù)學(xué)建模,并通過(guò)Matlab仿真驗(yàn)證模型的精確性。文獻(xiàn)[3]建立以位移和位移變化率為輸入的位移模糊控制器,以擺角和擺角變化率為輸入的擺角模糊控制器,通過(guò)仿真驗(yàn)證雙模糊控制器對(duì)系統(tǒng)的防搖效果。文獻(xiàn)[4]對(duì)集裝箱起重機(jī)的吊擺設(shè)備進(jìn)行仿真分析,并設(shè)計(jì)基于富士PLC的防搖控制系統(tǒng)用于實(shí)際吊裝現(xiàn)場(chǎng)中,運(yùn)行效果良好。
本文基于拉格朗日方程建立起橋式起重機(jī)的狀態(tài)空間模型,在Matlab/Simulink中搭建控制位移和擺角的串級(jí)PID控制模型,然后,在串級(jí)PID控制的基礎(chǔ)上將模糊自適應(yīng)PID控制引入內(nèi)環(huán)代替原來(lái)單純的PID控制,通過(guò)仿真實(shí)驗(yàn)對(duì)比兩種控制方式的控制效果。最后,在貝加萊防搖控制系統(tǒng)平臺(tái)上對(duì)串級(jí)模糊自適應(yīng)PID控制系統(tǒng)進(jìn)行實(shí)驗(yàn)測(cè)試,以驗(yàn)證理論分析的結(jié)果。
1 起重機(jī)防搖系統(tǒng)的數(shù)學(xué)模型
實(shí)際的橋式起重機(jī)模型很復(fù)雜,為了理論分析的方便,此處對(duì)系統(tǒng)模型作簡(jiǎn)化處理,假設(shè)如下:
1)鋼絲繩(吊繩)的質(zhì)量和長(zhǎng)度變化忽略不計(jì);
2)風(fēng)力、空氣阻力以及鋼絲繩與小車(chē)連接處的摩擦力忽略不計(jì);
3)系統(tǒng)的彈性形變忽略不計(jì);
4)將吊起的貨物視為無(wú)體積的質(zhì)點(diǎn)。
得到起重機(jī)的簡(jiǎn)化模型如圖1所示。
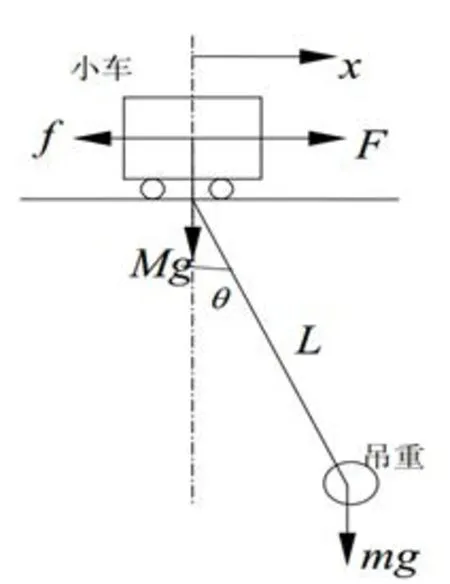
圖1 小車(chē)、吊重力學(xué)簡(jiǎn)化模型
設(shè)小車(chē)質(zhì)量為M(質(zhì)量單位為kg),吊重質(zhì)量為m,小車(chē)與軌道間的摩擦系數(shù)為,鋼絲繩長(zhǎng)度為L(zhǎng),小車(chē)水平驅(qū)動(dòng)力為F,吊重?cái)[角(鋼絲繩與垂直方向的夾角)為

拉格朗日(Lagrange)方程為:
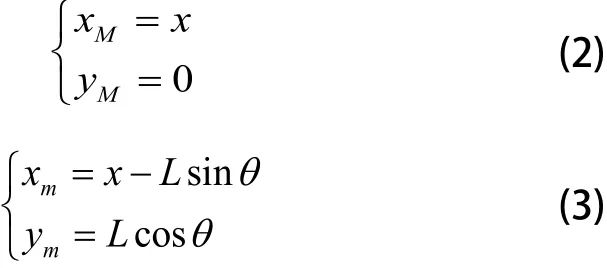
其中,L為拉格朗日算子,T為系統(tǒng)的動(dòng)能函數(shù),V為系統(tǒng)的勢(shì)能函數(shù),q,為拉格朗日變量,分別為廣義坐標(biāo)和廣義速度。由圖2.1可知,以小車(chē)質(zhì)心為坐標(biāo)原點(diǎn),設(shè)小車(chē)和吊重的坐標(biāo)分別為:
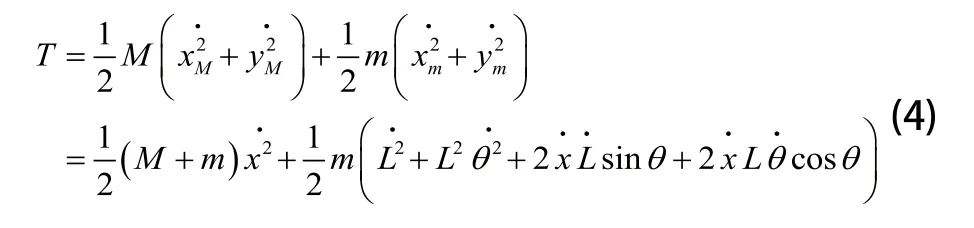
計(jì)算得到系統(tǒng)的動(dòng)能為:
勢(shì)能為:

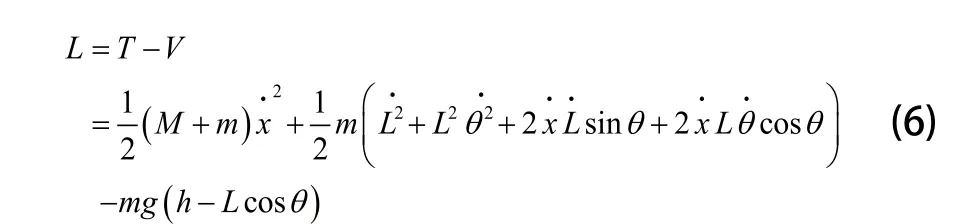
則系統(tǒng)的拉格朗日算子為:
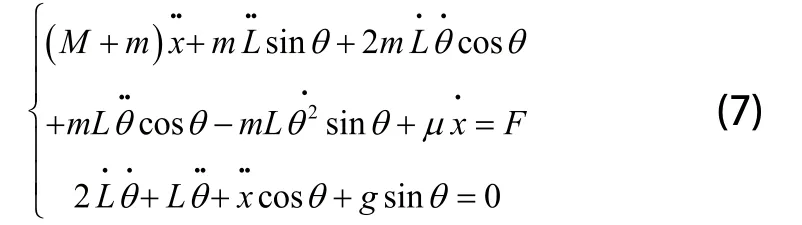
再根據(jù)拉格朗日方程建立起橋式起重機(jī)的動(dòng)力學(xué)微分方程:

3 仿真研究
3.1 串級(jí)PID控制
利用前文中已經(jīng)建立的橋式起重機(jī)的狀態(tài)空間模型,在Matlab/Simulink中搭建起控制位置和擺角的串級(jí)PID防搖控制仿真模型如圖3.1所示。
該控制模型的內(nèi)環(huán)是對(duì)擺角進(jìn)行控制,目的是控制擺角 在0°左右,讓吊重盡量在垂直方向上不晃動(dòng);外環(huán)是對(duì)小車(chē)位移的控制,控制小車(chē)準(zhǔn)確地停靠在設(shè)定的位置。仿真結(jié)果如圖3.2、3.3所示。
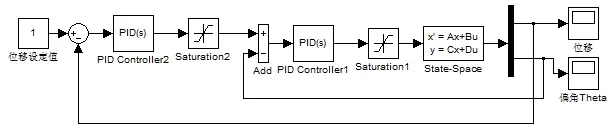
圖2 串級(jí)PID控制
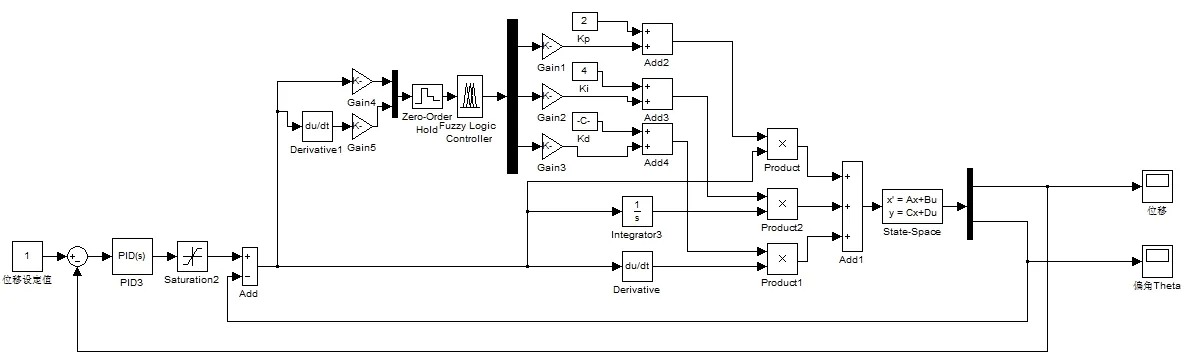
圖3 模糊自適應(yīng)PID控制
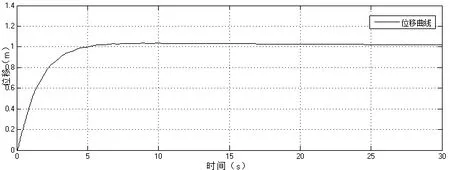
圖4 位移曲線
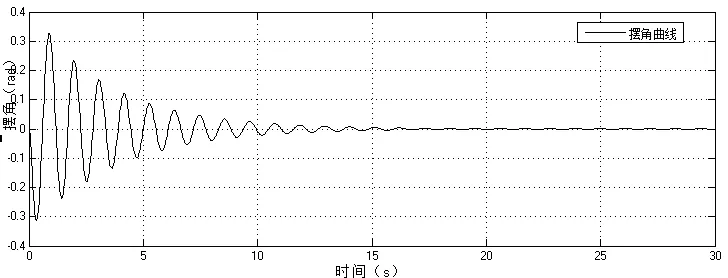
圖5 擺角曲線
從以上圖中可以看出,串級(jí)PID對(duì)位移的控制已經(jīng)能達(dá)到較好的效果,但對(duì)擺角的控制并不理想,擺角的調(diào)節(jié)時(shí)間在t=18s左右,調(diào)節(jié)過(guò)程較長(zhǎng),擺角波動(dòng)較大,不利于在實(shí)際生產(chǎn)中的應(yīng)用。
3.2 串級(jí)模糊自適應(yīng)PID控制
串級(jí)PID控制對(duì)擺角的控制不夠理想,主要因?yàn)樵谶\(yùn)行過(guò)程中擺角受到小車(chē)速度、軌道間的摩擦力、風(fēng)力等外界因素的干擾。模糊自適應(yīng)PID控制是將PID控制與模糊控制兩種控制方法相結(jié)合,發(fā)揮PID控制精度高和模糊控制靈活、適應(yīng)性強(qiáng)的特點(diǎn)。
3.2.1 控制策略設(shè)計(jì)
針對(duì)串級(jí)PID控制的內(nèi)環(huán)PID控制器主要是對(duì)擺角的控制,控制效果不甚理想。故提出將模糊控制算法引入內(nèi)環(huán)的想法,控制策略為以進(jìn)入內(nèi)環(huán)的偏差信號(hào)e和偏差變化信號(hào)ec作為模糊控制器的輸入變量,PID控制器的三個(gè)增量參數(shù)?kp,?ki,?kd作為模糊控制器的輸出變量。采用模糊推理的思想對(duì)PID控制器的三個(gè)參數(shù)進(jìn)行在線整定,以使控制效果達(dá)到最優(yōu),建立仿真模型如圖3.4所示。
建立Matlab仿真時(shí),模糊控制器的輸入輸出變量均采用“負(fù)大”(NB),“負(fù)中”(NM),“負(fù)小”(NS),“零”(ZO),“正小”(PS),“正中”(PM),“正大”(PB)7個(gè)模糊集來(lái)表征,隸屬函數(shù)都為三角形形式。如圖3.5—3.10為各輸入輸出變量的隸屬函數(shù)曲線。
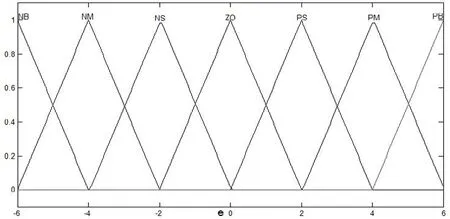
圖6 輸入偏差e的隸屬函數(shù)曲線

圖7 輸入偏差變化率ec的隸屬函數(shù)曲線
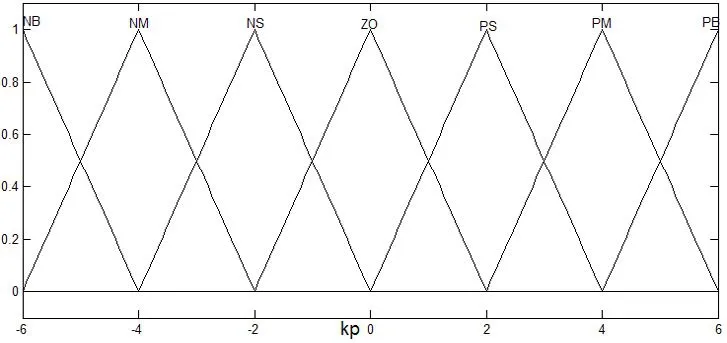
圖8 輸出?kp的隸屬函數(shù)曲線
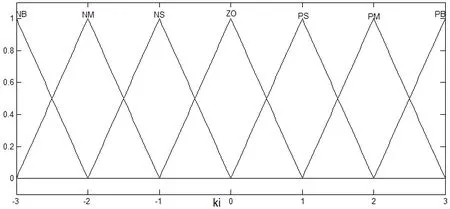
圖9 輸出?ki的隸屬函數(shù)曲線
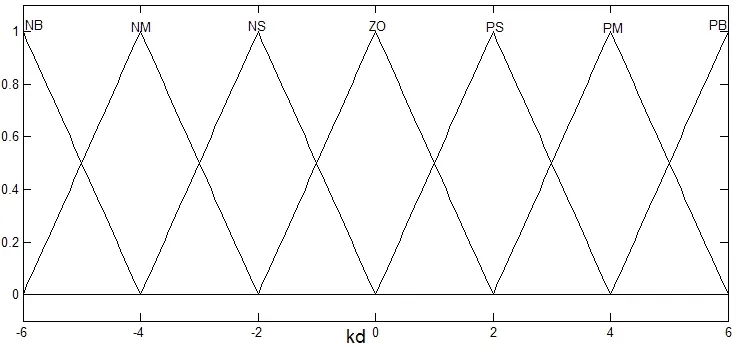
圖10 輸出?kd的隸屬函數(shù)曲線
3.2.2 模糊控制規(guī)則
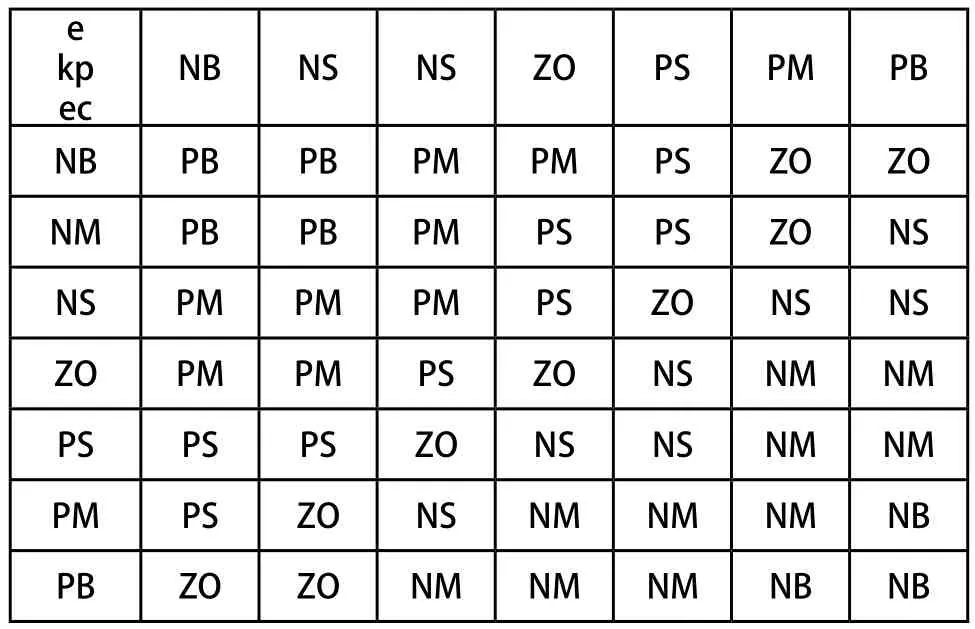
表1 比例增量參數(shù) 的控制規(guī)則
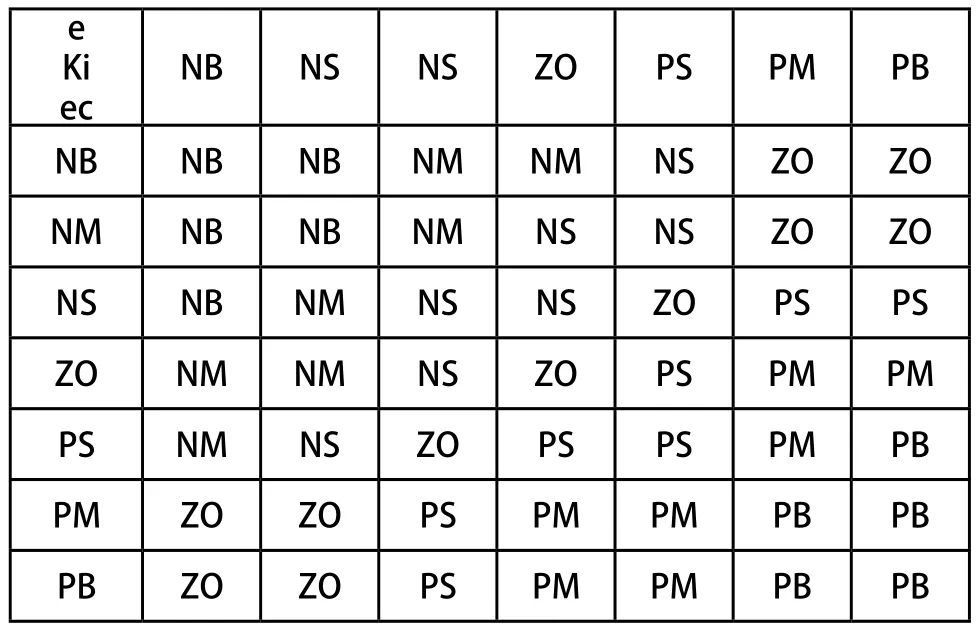
表2 積分增量參數(shù)?ki的控制規(guī)則
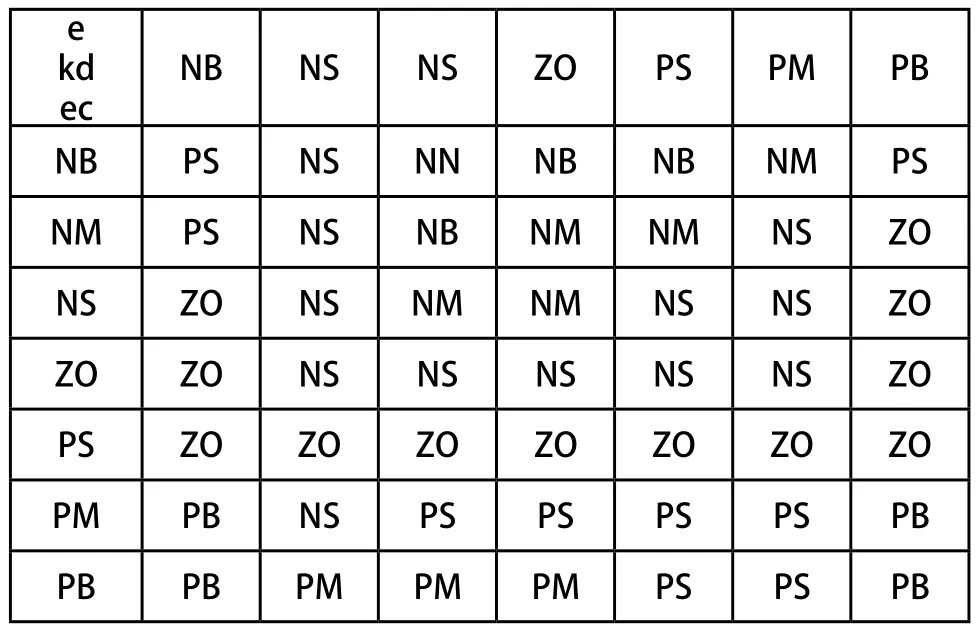
表3 微分增量參數(shù)?kd的控制規(guī)則
3.2.3 仿真分析
在串級(jí)PID控制的基礎(chǔ)上,內(nèi)環(huán)引入模糊控制算法,通過(guò)?kp,?ki和?kd三個(gè)增量參數(shù)分別對(duì)內(nèi)環(huán)PID的比例、積分、微分參數(shù)進(jìn)行自動(dòng)的調(diào)節(jié),實(shí)現(xiàn)PID參數(shù)的在線整定。對(duì)比仿真結(jié)果如圖3.10、3.11所示。
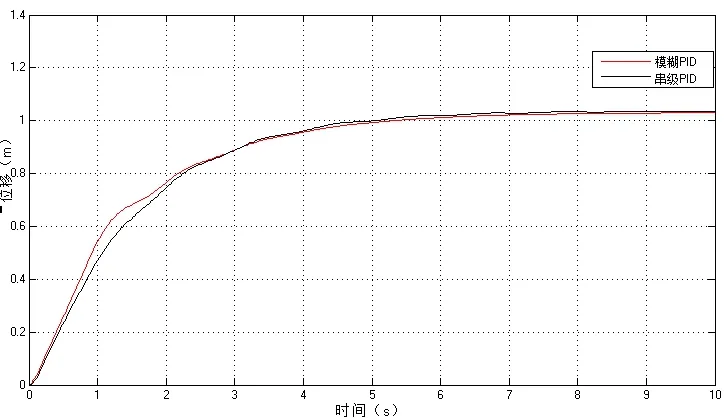
圖11 位移曲線對(duì)比
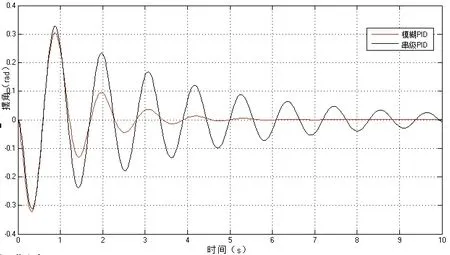
圖12 擺角曲線對(duì)比
從圖中可以看出,內(nèi)環(huán)替換為模糊自適應(yīng)PID控制后,對(duì)位移的控制沒(méi)有太大的改變,但是對(duì)擺角的控制改善卻明顯,模糊自適應(yīng)PID控制下擺角的波動(dòng)明顯減小,調(diào)節(jié)時(shí)間t=5s速度加快,擺角能夠較快地穩(wěn)定在0°左右。可見(jiàn),改進(jìn)后的串級(jí)模糊自適應(yīng)PID的控制效果優(yōu)于傳統(tǒng)的串級(jí)PID的控制效果。
4 實(shí)驗(yàn)驗(yàn)證
前面已經(jīng)從仿真研究上得出串級(jí)模糊自適應(yīng)PID控制策略對(duì)小車(chē)速度和吊重?cái)[角具有較好的控制效果,防搖效果明顯,能夠提高起重機(jī)的工作效率。為驗(yàn)證該控制算法在實(shí)際的工作中是否具有較優(yōu)的防搖作用,本設(shè)計(jì)利用貝加萊的防搖控制系統(tǒng)實(shí)驗(yàn)平臺(tái)進(jìn)行了防搖控制實(shí)驗(yàn)。該實(shí)驗(yàn)平臺(tái)主要由X20 PLC 及IO 模塊,ACOPOSmicro 伺服驅(qū)動(dòng)器,8LV 伺服電機(jī)及配套的電源模塊等組成。防搖系統(tǒng)裝置包括同步帶直線導(dǎo)軌、負(fù)載小車(chē)和擺錘。實(shí)物如圖4.1所示。
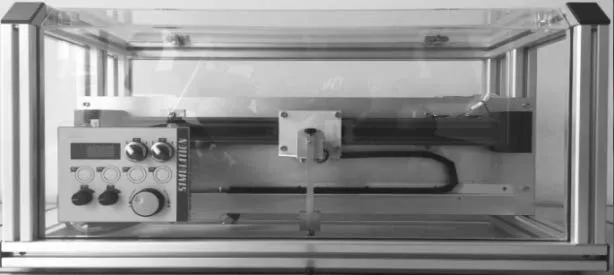
圖13 貝加萊防搖控制平臺(tái)
實(shí)驗(yàn)平臺(tái)以X20PLC作為控制器,設(shè)計(jì)控制框圖如圖4.2所示。
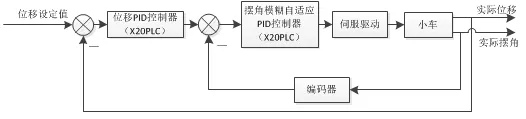
圖14 控制系統(tǒng)框
在Matlab/Simulink中已安裝的B&R Automation Studio Toolbox工具箱,將Simulink的仿真程序轉(zhuǎn)換為C語(yǔ)言導(dǎo)入X20PLC直接運(yùn)行,如圖4.3所示。利用AS中的Trace套件記錄擺角和位移的曲線,試驗(yàn)中考慮到實(shí)驗(yàn)平臺(tái)的實(shí)際情況對(duì)參數(shù)和設(shè)定值都作出相應(yīng)的調(diào)整,其中位移設(shè)定值s=40cm,通過(guò)實(shí)驗(yàn)得到一組擺角和位移的曲線如圖4.4所示。
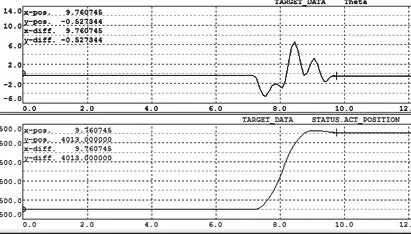
圖16 實(shí)驗(yàn)曲線
分析實(shí)驗(yàn)曲線擺角最大在°以內(nèi),調(diào)節(jié)時(shí)間在2.5s左右,位移誤差0.13cm。雖然與理論分析的結(jié)果有一定的出入,但是可以得出基于串級(jí)模糊自適應(yīng)PID的控制系統(tǒng)對(duì)橋式起重機(jī)的吊重防搖系統(tǒng)具有較好的控制作用。
5 結(jié)論
本文基于拉格朗日方程建立橋式起重機(jī)的狀態(tài)空間模型,利用Matlab/Simulink進(jìn)行仿真研究,在傳統(tǒng)串級(jí)PID控制的基礎(chǔ)上提出將原來(lái)內(nèi)環(huán)單純的PID控制替換為模糊自適應(yīng)PID控制,同時(shí)通過(guò)貝加萊防搖控制平臺(tái)完成實(shí)驗(yàn)驗(yàn)證得出基于串級(jí)模糊自適應(yīng)PID防搖控制系統(tǒng)的控制效果較好,對(duì)實(shí)際工業(yè)防搖控制系統(tǒng)的應(yīng)用具有一定的指導(dǎo)作用。
參考文獻(xiàn):
[1] 徐軍,汪偉剛.起重機(jī)防搖控制研究綜述[J].造船技術(shù),2013,(2):25-30.
[2] 王璐,常中龍,袁哲,et al.橋式起重機(jī)防搖控制系統(tǒng)數(shù)學(xué)建模方法研究[J].起重運(yùn)輸機(jī)械,2016,(9):1-5.
[3] 劉為,瞿軍,袁湛,et al.龍門(mén)吊車(chē)防搖模糊控制研究[J].機(jī)械制造,2009,47(2):16-8.
[4] 單磊,費(fèi)國(guó).防搖控制系統(tǒng)在集裝箱起重設(shè)備中的研究與應(yīng)用[J].起重運(yùn)輸機(jī)械,2011,(10): 51-5.
[5] 胡艷麗,劉團(tuán)結(jié),季學(xué)斌,et al.基于模糊的的橋式起重機(jī)智能防擺控制研究[J].數(shù)字技術(shù)與應(yīng)用,2014,14(7):22.
[6] 禹建麗,張宗偉,楊用增.基于自適應(yīng)模糊神經(jīng)網(wǎng)絡(luò)的起重機(jī)吊擺防搖控制[J].電氣自動(dòng)化,2009,31(2):28-9.
[7] 王佳奕.岸邊集裝箱起重機(jī)自動(dòng)防搖控制的研究[D].上海交通大學(xué),2012.
Research on anti swing control of crane based on cascade fuzzy adaptive PID
LIU Bin1, CHEN Hai-yun1
TP273.4
:A
:1009-0134(2017)08-0019-04
2017-04-17
劉斌(1990 -),男,研究生,研究方向?yàn)楣I(yè)控制自動(dòng)化。
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
小獼猴智力畫(huà)刊(2022年9期)2022-11-04 02:31:42
中學(xué)生數(shù)理化·中考版(2022年11期)2022-02-16 07:01:20
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
小哥白尼(趣味科學(xué))(2019年6期)2019-10-10 01:01:50
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
發(fā)明與創(chuàng)新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
核科學(xué)與工程(2015年4期)2015-09-26 11:59:03
