改進的BP神經網絡在傳動軸結構設計中的應用
2017-09-15 13:02:53楊宏才
無線互聯科技 2017年16期
王 勝,楊宏才
(西京學院 機電技術系,陜西 西安 710123)
改進的BP神經網絡在傳動軸結構設計中的應用
王 勝,楊宏才
(西京學院 機電技術系,陜西 西安 710123)
Shaffer函數定義域在[-10,10]區間內,BP神經網絡擬合該函數訓練時間長,且無法達到期望精度,說明BP神經網絡擬合復雜非線性函數能力需改善。文章提出了一種改進的BP神經網絡,先對網絡的輸入進行K-Means聚類,BP神經網絡訓練采用大規模節點,聚類輸入分別激活部分節點進行訓練,每組聚類使用不同的節點,通過子網絡訓練聚類樣本,減少了網絡擬合難度。經測試改進的BP神經網絡達到了精度。最后,用改進的BP神經網絡進行了軸徑的最優計算。
BP神經網絡;Shaffer函數;K-Means聚類;結構優化
1 人工神經網絡研究背景
人工神經網絡具有強大的函數擬合、數據預測、模式識別等能力,成為學術界的研究熱點。BP神經網絡是人工神經網絡常見的一種形式,理論上已經證明,當BP神經網絡的節點數足夠大時,它可以擬合任意一種曲線[1],因而BP神經網絡是使用最為廣泛的一種網絡。但BP神經網絡存在一些問題,主要包括:訓練時間過長;易陷入局部極小解;隱層節點數難以確定,隱層節點數太少,擬合精度達不到要求,隱層節點數太多,會導致計算負擔過重。
學術界對BP神經網絡主要的優化方向,一種是數值優化,主要有牛頓法、共軛梯度法;一種是啟發式優化,常見的有動量算法、可變速率算法[2]。算法優化的另一個思路是多種算法的融合,粒子群神經網絡[3],遺傳神經網絡[4],混沌神經網絡[5],模擬退火神經網絡[6],蟻群神經網絡等[7],上述算法都在一定程度上改善了神經網路的性能,但是都無法完全克服BP神經網絡的不足,特別是復雜非線性系統,網絡的不足尤為明顯。
針對BP神經網絡上述不足,本文提出了一種改進的BP神經網絡。用局部BP神經網絡對部分樣本進行訓練,訓練過的局部網絡不再參與其他樣本的訓練,這些適應局部輸入的網絡綜合成為大系統。該改進方法簡化了目標,減少了網絡負擔。用Shaffer測試函數對網絡性能進行了檢測,達到了預設精度。將該網絡應用于某型印刷機主傳動軸軸徑的計算,用該網絡可以減少印刷機主傳動軸設計的計算量。
2 BP神經網絡算法概述
2.1 BP神經網絡算法思想
BP神經網絡主要由隱含層、輸出層兩層組成。BP神經網絡運行包括兩個過程,正向傳播,輸入數據自網絡隱含層的權值、閾值、神經元函數處理后,傳送到輸出層;反向傳播,當輸出結果達不到期望精度時,由輸出層到隱含層修正網絡每一層神經元的權值和閾值。兩個過程反復進行,最終使網絡的性能函數達到要求。BP神經網絡的具體算法參照文獻[2]。
2.2 BP神經網絡算法分析
本文采用Shaffer測試函數為例,對BP神經網絡算法特點進行討論,Shaffer函數如式(1)所示。

該函數是典型的非線性震蕩函數,用BP神經網絡對Shaffer函數進行擬合,隨機產生10 000個訓練樣本,22個測試樣本。神經網絡的隱層采用sigmoid函數,隱層節點數設置為50,輸出層采用purelin函數。訓練步數設定為6 000,設定誤差目標0.000 05。Shaffer函數的兩個輸入x1,x2定義域為[-10,10]時,用BP神經網絡擬合,
網絡訓練用時3 284秒,訓練很早就陷入了停滯,無法達到預設精度。可見,BP神經網絡在應用時難以實現任意函數的擬合,需要隱層節點更加復雜的神經網絡。但是神經網絡結構的確定本身就是一個難點,且復雜的網絡結構具有更大的訓練負擔。
2.3 BP神經網絡的改進
本文提出一種BP神經網絡的改進算法,具體做法是:
(1)對樣本輸入采用K-Means聚類法進行預處理,從S個樣本中隨機選取n個元素作為質心。計算其余元素到每個質心的歐式距離,將這些元素到質心距離最短的歸為一類,分別為(S1,S2,...Sn),計算同類元素的平均值,作為新的質心μi,重復上述步驟直到質心收斂。距離計算表達式如式(2)所示。

其中,xj是樣本輸入集合的一個元素,樣本xj和質心μi均為多維。
(2)將聚類后的輸入樣本用改進的BP神經網絡訓練。網絡的總節點數應滿足n個聚類樣本激活的節點的總和,聚類后的輸入樣本依次進入網絡進行訓練。每一聚類樣本只激活部分節點參與訓練,激活的最小節點數為網絡輸入數和輸出數之和的5~10倍。新樣本進入后,訓練過的節點將不參與訓練,激活新的節點繼續訓練。
(3)訓練后的BP神經網絡,實現了子網絡對不同聚類的擬合。當有輸入數據進入網絡時,判斷該數據屬于何種聚類,通過網絡對應激活的權值計算其輸出。
2.4 改進的BP神經網絡擬合Shaffer函數
采用改進的BP神經網絡擬合Shaffer函數,網絡最大節點數設置為500,每類樣本初始激活15節點,隨機產生10 000個輸入樣本,均勻隨機選取9個質心進行K-Means聚類,聚類后的樣本進入改進后的BP神經網絡進行訓練,經過362.223秒達到預設精度,用測試樣本驗證,其結果如表1所示。
經過測試樣本進行驗證,實際輸出值與期望輸出擬合較好,說明改進的BP神經網絡擬合復雜的非線性函數具有良好的性能。
3 改進的BP神經網絡的應用
某印刷廠擬對該型膠印機主傳動軸進行技術改造。從節約材料、減輕重量、縮短響應時間等方面考慮,將原有的實心傳動軸改造成空心傳動軸。傳動軸主要受到扭轉力矩,應保證傳動軸在最大扭轉力矩作用下,具有足夠的扭轉強度和剛度。本文用改進的BP神經網絡進行軸徑設計。
3.1 軸徑的設計分析
根據強度條件計算主軸的外徑。主軸所受到的切應力應該小于主軸材料所允許的切應力。可得空心傳動軸內外徑比如式(3)所示。

其中,Tmax為傳動軸最大扭矩,單位kN·m,[τ]為軸的許用切應力,單位d為空心軸的內徑,D為空心軸的外徑,單位為m。
根據剛度條件計算主軸的外徑如式(4)所示。

上式中,G為材料的切變模量,取值為79~81 GPa。[θ]為單位長度允許扭轉角,單位°/m,取值0.15~1°/m。傳動軸的內外直徑比是一個典型的多輸入單輸出函數,其值受到軸的最大扭轉力矩、軸的材料、外徑、允許扭轉角等因素影響,主軸設計力矩0.5~10 kN·m,許用直徑0.02~0.120 m,軸類材料許用切應力如表2所示。
表中的每一個參數不一定都有可行解,且各個參數相互耦合,傳統的BP神經網絡難以完成公式(3)和(4)的擬合。本文用改進的BP神經網絡擬合上述的計算公式。
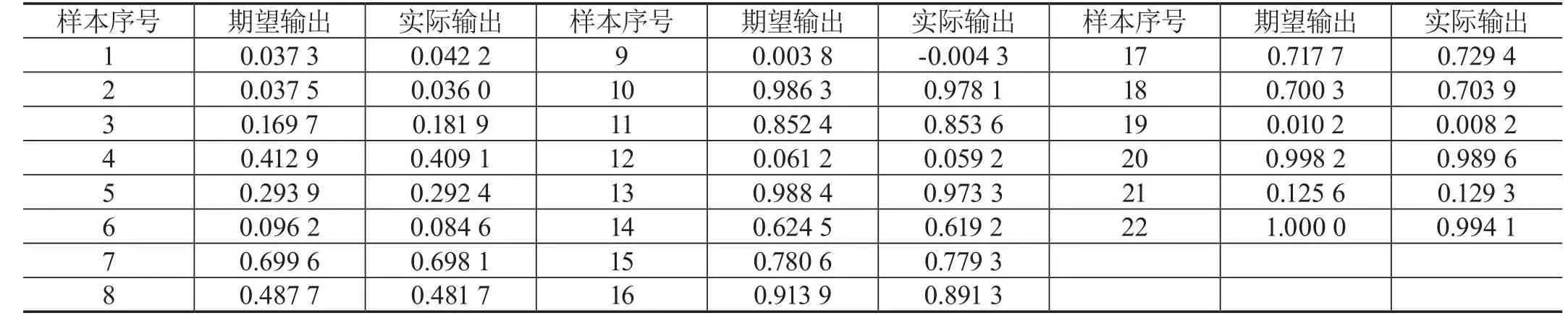
表1 改進的BP神經網絡測試結果

表2 軸類材料設計參數
3.2 BP神經網絡擬合內外徑計算公式
用BP神經網絡擬合強度條件下的公式(1),輸入值分別為:軸外徑、設計最大扭矩、許用切應力,輸出為軸內外徑比值。網絡訓練目標步數6 000,期望誤差0.000 01,隨機產生5 000個樣本,其中的100個樣本用作測試樣本。由于3組輸入值彼此差異過大,且量綱不一致,對輸入樣本線性歸一化,如式(5)所示。

xnorm表示數據進行了線性化處理,該數據范圍為[-1,1],沒有量綱。對于樣本中的非可行解,將該樣本舍棄,可行解樣本進入訓練。
滿足剛度條件下的公式(6)的擬合,輸入值分別為軸外徑、設計最大扭矩、允許扭轉角,輸出為軸內外徑比值。其他網絡參數以及擬合過程,與強度條件下的擬合類似,兩個網絡對可行解的擬合如圖1所示。
改進的神經網絡較好地完成了軸徑公式的擬合任務,為軸的設計提供參考。軸徑的最優解希望傳動軸的直徑、質量最小,承受的扭矩最大,設置最優解判定公式(6)。


圖1 改進的BP神經網絡擬合軸計算公式
公式中的常數為權重系數,表明該項指標的重要性。為材料密度,單位:g/cm3。公式中軸直徑、質量、扭矩的倒數均作歸一化處理。用本文改進的BP神經網絡擬合公式(6),訓練樣本為公式(3)和公式(4)的隨機可行解。神經網絡擬合結果如圖2所示。
某型膠印機傳動軸承受的最大扭矩Tmax為1.163 kN·m,安全系數為1.1~1.3,因此設計軸的扭矩1.2~1.5 kN·m。利用建立起的BP神經網絡對軸徑設計進行決策,有效解中40Cr等合金材料樣本許用切應力為52 MPa,獲得最優輸出-0.608 8,外徑D為0.062 7 m,內徑d為0.050 7 m,內外徑比值α為0.8080,最大扭矩Tmax為1.445 kN·m。
本文最后給出的設計建議是,采用40 Cr等合金材料,設計傳動軸扭矩為1.445 kN·m時,傳動軸軸外徑D為0.060 0 m,內徑d為0.050 0 m為最佳設計值。
4 結語
BP神經網絡擬合Shaffer等非線性函數時,網絡結構不易確定,訓練時間長,且難以達到控制精度,本文提出了一種改進的BP神經網絡,首先對樣本輸入進行K-Means聚類,BP神經網絡產生一個大規模節點;每組聚類分別進入網絡訓練,訓練時只激活部分節點,被激活的節點不再參與其他聚類的訓練,即每一個節點只接受一種聚類。經過驗證,改進的神經網絡具有較快的收斂速度和良好的擬合精度,適用于擬合復雜的非線性函數,用改進的神經網絡計算傳動軸的軸徑,并且擬合傳動軸設計的最優決策,證明該算法具有良好的應用前景。
[1]HORNIK K,STINCHCOMBE M,WHITE H. Multilayer feedforward networks are universal approximators[J]. Neural Networks,1989(5):359-366.
[2]哈根.神經網絡設計[M].戴葵,譯.北京:機械工業出版社,2002.
[3]李松,劉力軍,翟曼.改進粒子群算法優化BP神經網絡的短時交通流預測[J].系統工程理論與實踐,2012(9):2045-2049.
[4]徐小力,徐洪安,王少紅.旋轉機械的遺傳算法優化神經網絡預測模型[J].機械工程學報,2003(2):140-144.
[5]周穎,趙慧敏,陳陽,等.基于改進混沌自適應粒子群神經網絡的磨礦粒度軟測量[J].系統仿真學報,2016(12):2946-2950.
[6]尤麗華,吳靜靜,王瑤.基于模擬退火優化BP神經網絡的pH值預測[J].傳感技術學報,2014(12):1643-1648.
[7]孫旺,李彥明,杜文遼.基于蟻群神經網絡的泵車主泵軸承性能評估[J].上海交通大學學報,2012(4):596-600.
[8]楊曉輝.簡明機械實用手冊[M].北京:科學出版社,2006.
Application of improved BP neural network in structural design of drive shaft
Wang Sheng, Yang Hongcai
(Mechanical and Electrical Engineering Department of Xijing University, Xi’an 710123, China)
The Shaffer function de fi nes the domain in the range of [-10,10], BP neural network fi tting function costs long training time, and can not achieve the desired accuracy, it showed that the ability of BP neural network to fi t the complicated nonlinear functions needs to be improved. This paper presents an improved BP neural network, fi rst, we should carry out K-Means clustering for the input of network, BP neural network is trained by large scale nodes, partial nodes are activated by clustering input to train, each cluster uses different nodes, by sub network to train clustering samples, it reduces network fi tting dif fi culty. The test results show that improved BP neural network meets the precision. Finally, the axle diameter is calculated optimally by the improved BP neural network.
BP neural network; Shaffer function; K-Means clustering; structure optimization
王勝(1982— ),男,陜西西安人。
