基于慣性補償和MEMS的純電動汽車坡道識別研究?
2017-09-15 05:04:16朱長順
汽車工程 2017年8期
羅 石,鄭 超,朱長順
基于慣性補償和MEMS的純電動汽車坡道識別研究?
羅 石1,鄭 超1,朱長順2
(1.江蘇大學汽車與交通工程學院,鎮江 212013;2.江蘇大學機械工程學院,鎮江 212013)
本文中引入了基于慣性補償和MEMS系統的坡道識別原理。采用慣性補償法分解出MEMS三軸加速度計中的重力加速度分量,并利用它來修正MEMS陀螺儀模塊的三軸角速度。通過四元數來表示車載坐標系與慣性坐標系的旋轉關系,再將其轉換為歐拉角,即可解算出電動汽車當前的坡道角。實車試驗結果表明,這種算法精度高,實時性好,易于MCU實現。
電動汽車;坡道識別;慣性補償;卡爾曼濾波;MEMS陀螺儀;MEMS加速度計
前言
結合坡道角能精確控制電機輸出轉矩,有效解決電動汽車坡道起步驅動力矩不足、坡道溜車等問題[1];能設計符合坡道行駛規律的電動汽車AMT換擋策略,避免坡道頻繁換擋;能設計出高效率的能量回收系統。由此可見,處理好坡道工況對電動汽車的安全性、經濟性和舒適性有非常重要的意義。關于坡道識別的研究,有根據汽車縱向動力學設計出的坡道識別方法[2],有利用傳感器實測的縱向加速度與車速差分獲得的加速度之間的差異設計出的基于加速度區間判斷的坡道識別方法[3],也有將汽車動力學原理與通過CAN總線獲得發動機的轉矩與轉速相結合而設計出的坡道識別算法[4]。本文中則采用慣性補償法獲得重力加速度在車載坐標系三軸的分量,利用重力加速度向量的方向不變性,通過四元數姿態解算算法實時修正電動汽車的坡道角,可準確識別出電動汽車所處的坡道。本文中坡道角識別周期為20ms,采用的MCU是飛思卡爾的SPC5644。試驗證明,本文中設計的坡道識別模塊具有很強的實用性。
1 坡道識別原理簡介
1.1 坡道識別的原理
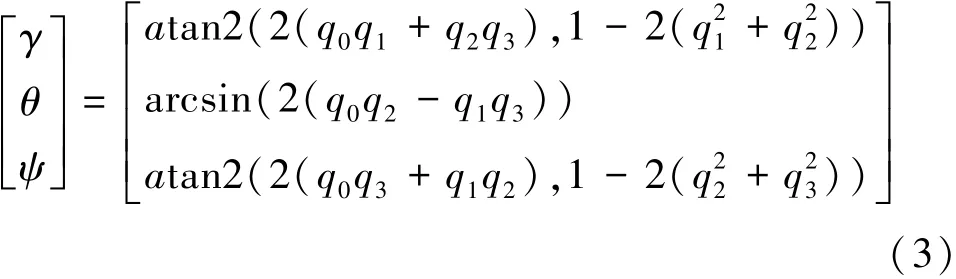
慣性坐標系稱為R系,車載坐標系(圖中與一正方體固結者)為b系,如圖1所示。這兩個坐標系的關系可以用四元數旋轉矩陣表示[5-6]:
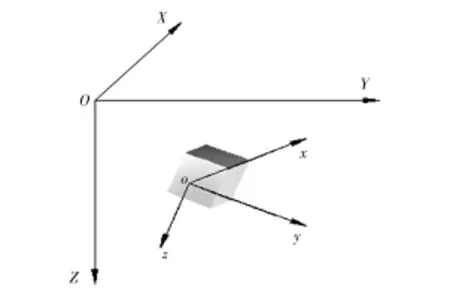
圖1 慣性坐標系與車載坐標系
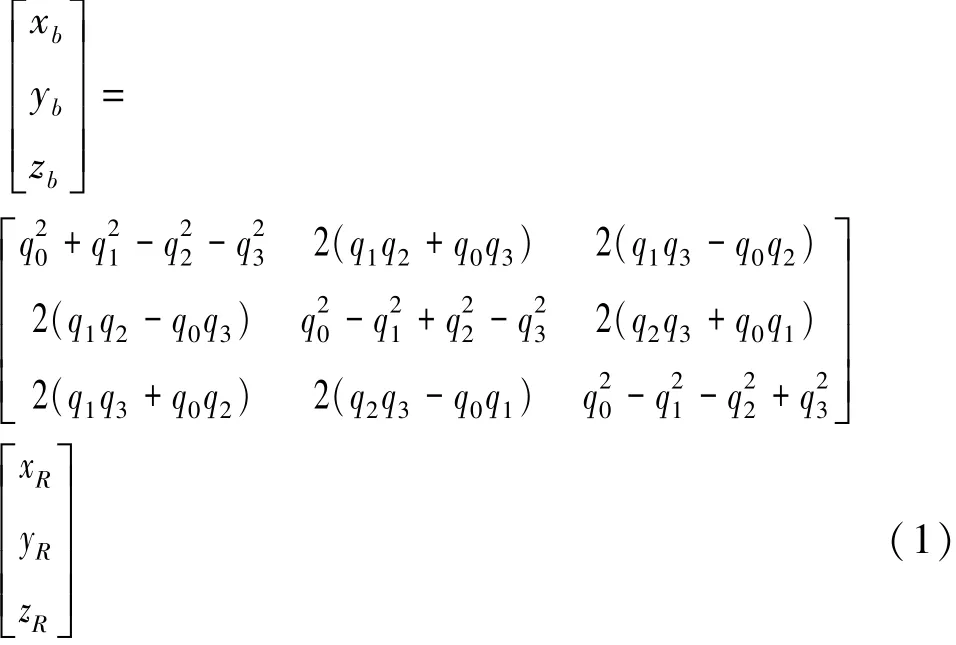
式中:q0,q1,q2和q3為四元數的4個參數;
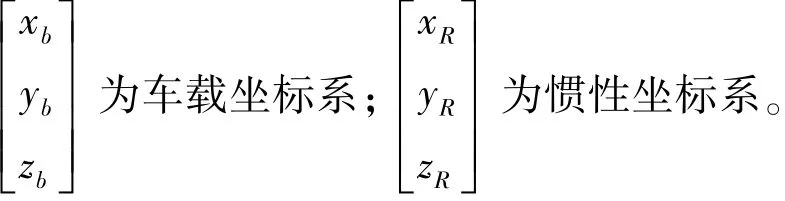
計算式(1)中的旋轉矩陣即可確定R系與b系的旋轉關系,理論上只要對MEMS三軸陀螺儀的角速度采用1階Rung-kuta法,見式(2),積分即可求出四元數q(t),進而求得四元數旋轉矩陣。

解為X(t+Δt)=X(t)+Δt·f(X(t),ω(t))

式中:θ為坡道角;γ為側傾角;ψ為航向角。
1.2 坡道識別存在的問題
MEMS三軸陀螺儀存在零漂、噪聲干擾等誤差,這些誤差會隨著積分累積。根據1.1節設計坡道識別模塊,并將坡道識別模塊水平靜止放置,實際測試40s,結果如圖2所示(圖2詳細分析見4.1節),坡道識別誤差達到3.3°,所以必須對積分誤差進行修正。本文中采用MEMS三軸加速度計測量的重力加速度修正MEMS三軸陀螺儀的積分誤差。
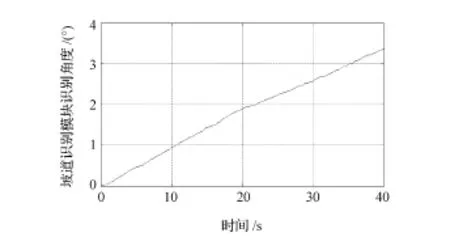
圖2 MEMS陀螺儀積分誤差
2 重力加速度修正與慣性補償
由1.2節可知,由于積分誤差的存在,坡道識別模塊存在很大的零漂,采用重力加速度實時修正MEMS陀螺儀角速度即可消除累積誤差。
重力加速度的方向始終垂直于地面,不會隨著車載坐標系b系的變化而變化,這是重力加速度能修正MEMS三軸陀螺儀的理論基礎,重力加速度在車載坐標系b系的分量可由MEMS三軸加速度計測量。
2.1 重力加速度修正原理
將慣性坐標系R系通過四元數Qt-1的旋轉矩陣變換到bt-1系,此時R系中的重力加速度向量在bt-1系中的表達式為,在bt系中重力加速度向量經MEMS三軸加速度計測量、歸一化后的表達是之間的誤差代表著bt-1系與bt系之間的誤差即,對這個誤差進行PI調節,調節之后用來修正MEMS三軸陀螺儀的三軸角速度式中為原始數據濾波之后的向量;為 PI調節的輸出。
此時,由Qt-1通過重力加速度修正過的經式(2)積分得到Qt:
設計PI調節器,根據bt-1系與bt系之間的誤差進行PI調節,PI調節的輸出為。根據式(4)修正MEMS三軸陀螺儀的三軸加速度。
將模塊水平靜止放置,且采用MEMS三軸加速度計測量的重力加速度修正MEMS三軸陀螺儀的角速度。如圖3所示(圖3詳細分析見4.1節),經重力加速度修正過的俯仰角誤差穩定在0.1°,由此可見,采用重力加速度修正能消除積分誤差。
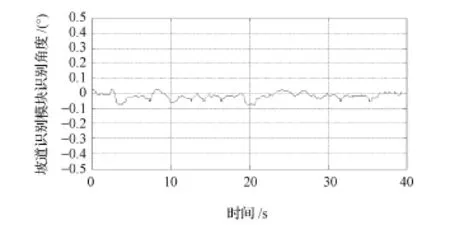
圖3 重力加速度修正積分誤差
2.2 MEMS三軸加速度計測量重力加速度存在的問題
由2.1節可知,坡道識別模塊在靜止時,能夠準確識別出坡道角。但是,電動汽車加速行駛時,則會產生較大的縱向加速度,此時MEMS三軸加速度計會受其干擾,測出的三軸加速度已不再是重力分量,如果將MEMS三軸加速度計的測量作為重力加速度來修正積分誤差,坡道識別模塊識別出的坡道角會有很大誤差,如圖4所示。針對這一問題,提出了慣性補償法。
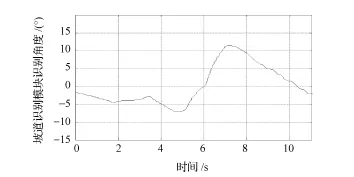
圖4 無慣性補償加速行駛
3 重力加速度的慣性補償與信號處理
由2.2節可知,能否從汽車各種加速度中解耦出重力加速度是坡道識別準確與否的關鍵。MEMS的Z軸加速度去除路面隨機振動干擾可得到較為準確的重力加速度在Z軸上的分量,通過這個Z軸分量可對X軸的解耦誤差(解耦誤差詳見3.2節分析)進行限幅。
3.1 解耦重力加速度在Z軸上的分量
分析車載坐標系b系Z軸上的加速度,MEMS Z=Gz+bz(MEMS Z為MEMS三軸加速度計Z軸的測量結果,Gz為重力加速度在Z軸上的分量,bz為電動汽車垂直振動加速度,其中有用的是Gz,需要消除的是bz),影響因素是bz,由于垂直振動加速度是路面隨機振動,對于隨機振動可采用平均值濾波法消除振動加速度干擾。
電動汽車在平直路面行駛工況下,采集車載坐標系b系Z軸的加速度16s。圖5顯示了濾波前后的Z軸加速度曲線。
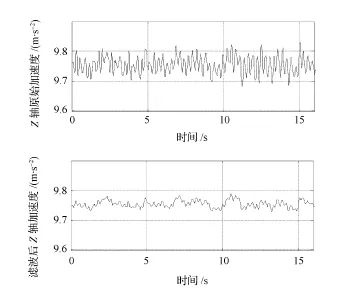
圖5 濾波前后的Z軸加速度原始加速度
由圖5可知,采用平均值濾波能有效消除路面隨機振動對Z軸加速度的影響,從而獲得較為準確的重力加速度在Z軸上的分量。
3.2 解耦重力加速度在X軸上的分量
影響電動汽車縱向加速度測量結果的因素非常復雜。分析車載坐標系b系X軸的加速度,MEMS X=Gx+ax+bx(MEMS X為MEMS三軸加速度計X軸的測量結果,Gx為重力加速度在X軸上的分量,ax為電動汽車縱向加速度,bx為電動汽車縱向振動加速度,其中有用的是Gx,需要消除的是ax和bx(bx消除法見3.4節)),主要影響因素是ax,本試驗采用獲取車速脈沖并計算電動汽車縱向加速度法消除ax,但是,由于輪胎變形等因素影響,ax與電動汽車實際加速度不完全吻合,尤其是起步和制動階段。針對起步和制動階段提出了限制解耦誤差修正MEMS X加速度法(Ex=MEMS X-Gx-ax-bx,其中Ex為解耦誤差)。3.2.1 計算電動汽車縱向加速度ax
本試驗車在從動軸安裝光電編碼器,實時采集編碼脈沖,實時計算電動汽車的縱向加速度,并濾掉bx得到ax。利用Gx=MEMS X-ax,得到重力加速

式中:N1為t1時刻讀取的脈沖個數;N2為t2時刻讀取的脈沖個數;samper_t為脈沖采樣周期,ms;r為車輪半徑,m;encoder為電機解碼器的齒數;i為電動汽車主減速比。
3.2.2 限制解耦誤差修正MEMS X加速度
電動汽車加速行駛時,由于輪胎存在滑移現象,計算的縱向加速度往往比實際加速度大,而且加速度越大,該誤差就越大。電動汽車制動時,情況恰恰相反,這個誤差與輪胎的滑移率有關,而滑移率無法測量。為此,本文中采用限定X軸測量值的方法,解決電動汽車加速度較大時的誤差問題。
由于Z軸加速度經均值濾波后較為準確,這是限定X軸測量值的前提條件之一。由第2節可知,坡道識別模塊靜止誤差在0.1°之內,這是前提條件之二。
繪制30°-0°角(識別范圍為-30°~30°),靜態時,MEMS X軸加速度隨MEMS Z軸加速度變化的關系圖,如圖6所示(-30°-0°的關系圖與30°-0°的關系圖呈鏡像關系),通過控制解耦誤差Ex(Ex為上限與下限的比值減去理論值)限制X軸的加速度輸出值。度在X軸的分量:
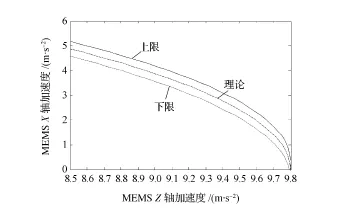
圖6 MEMS X加速度限定關系
3.3 解耦重力加速度在Y軸上的分量
分析車載坐標系b系Y軸的加速度,MEMS Y=Gy+ay+by(MEMS Y為MEMS三軸加速度計Y軸的測量結果,Gy為重力加速度在Y軸上的分量,ay為電動汽車向心加速度,by為電動汽車側向振動加速度,其中有用的是Gy,需要消除的是ay和by(消除法見3.4節)),主要影響因素是ay,采用向心加速度代替側向加速度,精度上可以滿足使用要求,但是,由式(7)計算的向心加速度受電動汽車速度影響大,誤差大,波動大。通過濾波消除by,利用Gy=MEMS Y-ay得到重力加速度在Y軸上的分量。

式中:v為電動汽車縱向速度,m/s;ωz為電動汽車橫擺角速度,rad/s。
由式(7)可知,想要獲得準確的向心加速度,必須保證汽車的瞬時速度v和MEMS陀螺儀的Z橫擺角速度ωz準確,但是v并不能準確計算出來,MEMS Y軸加速度與ay的差分可以認為是重力加速度在Y軸的分量,而這個分量理論上只是由于汽車側傾引起的,所以根據汽車的最大側傾角對Gy進行限幅處理。
3.4 MEMS加速度計和陀螺儀數據處理
由于MEMS三軸加速度計和三軸陀螺儀模塊輸出的車載坐標系b系的三軸加速度和三軸角速度存在噪聲和振動加速度等干擾,須從干擾的信號中提取有用信號,獲取真實值。為此設計了卡爾曼濾波器,對X軸濾波,消除bx和噪聲干擾;對Y軸濾波,以消除by和噪聲干擾。
卡爾曼濾波算法為
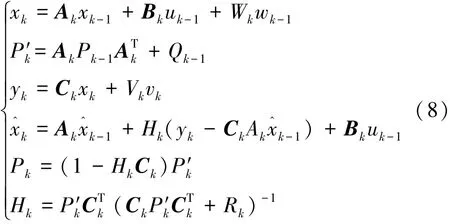
式中:Pk為協方差;Hk為卡爾曼增益。
圖7和圖8分別對比了卡爾曼濾波前后MEMS三軸加速度計的X軸加速度和陀螺儀的繞X軸角速度。此處僅以X軸為例,Y軸同理。
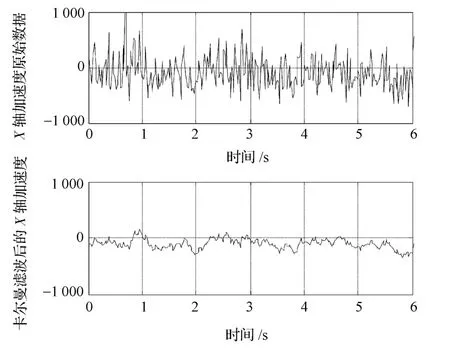
圖7 卡爾曼濾波前后的MEMS X軸加速度
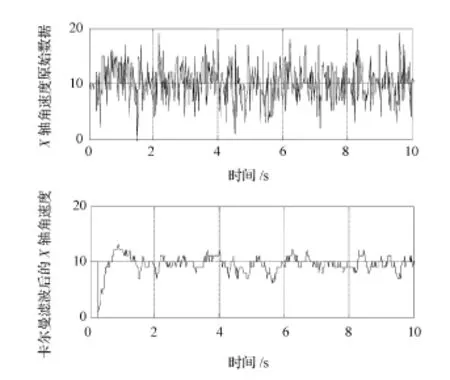
圖8 卡爾曼濾波前后的MEMS陀螺儀繞X軸角速度
4 試驗數據分析與驗證
4.1 重力加速度修正積分誤差驗證
坡道識別模塊水平靜止放置40s,圖2顯示了無重力加速度修正時,坡道識別模塊識別角度存在3.3°的漂移,角度漂移是MEMS陀螺儀積分誤差造成的。圖3顯示了經過重力加速度修正過的俯仰角誤差穩定在0.1°。由此可見,本文中提出重力加速度修正MEMS陀螺儀的積分誤差法能夠有效消除MEMS陀螺儀的積分誤差。
無慣性補償時,直接將MEMS三軸加速度計測量值作為重力加速度修正MEMS三軸陀螺儀積分誤差,且電動汽車加速行駛時,坡道識別模塊的識別結果如圖4所示,坡道識別模塊識別結果存在嚴重誤差。
4.2 坡道識別的坡道實車試驗
檢驗電動汽車在水平道路勻速行駛、加速行駛工況下識別的坡道角是否正確。圖9顯示了在水平路面勻速行駛工況下,坡道識別模塊能準確識別出當前的坡道值。圖10顯示了電動汽車加速行駛工況下,且無慣性補償時,坡道識別模塊不能準確識別坡道。圖11顯示了經過慣性補償之后,坡道識別模塊能準確識別當前所處的坡道值,誤差在1°之內。
檢驗電動汽車在10°坡道角勻速行駛、加速行駛工況下是否能正確識別坡道。圖12顯示了電動汽車在10°坡道勻速行駛時,坡道識別模塊識別的當前坡道角是10°,與實際坡道吻合。圖13顯示了電動汽車由水平路面加速上坡時,且未對重力加速度慣性補償時,坡道識別模塊識別的角度誤差很大。圖14顯示了經過慣性補償后的坡道識別模塊能夠準確識別當前坡道角。
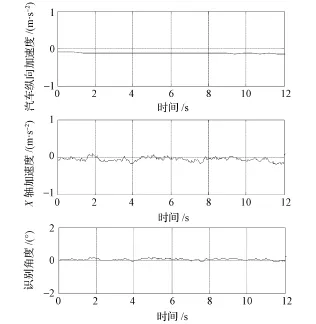
圖9 電動汽車勻速行駛
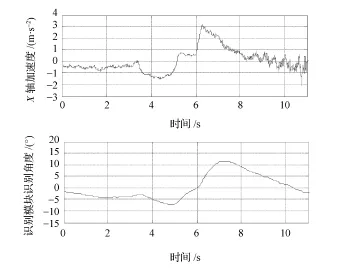
圖10 電動汽車加速行駛
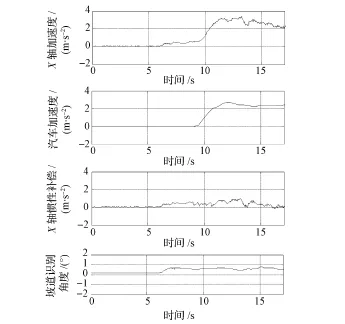
圖11 慣性補償后加速行駛

圖12 坡道勻速行駛
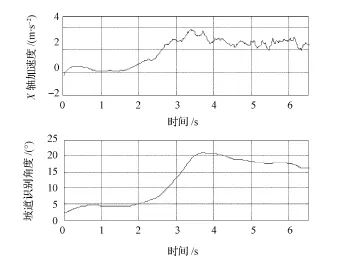
圖13 坡道加速行駛
5 結論
本文中提出了基于慣性補償和MEMS的電動汽車坡道識別方法,通過大量試驗驗證,此方法實時識別出的坡道誤差小,實用性強,計算速度快,20ms更新一次坡道角,并能通過CAN總線實時發送坡道角。結合坡道信息設計電動汽車AMT、坡道起步控制和能量回收策略,能提高電動汽車安全性、經濟性,基于坡道識別的電動汽車控制系統是電動汽車未來發展的方向。
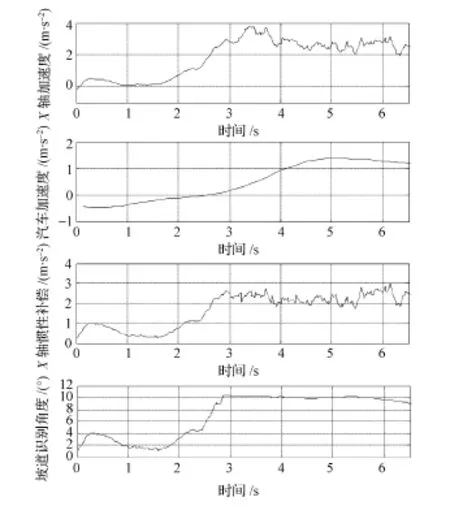
圖14 慣性補償的坡道加速行駛
[1] 陳淑江,秦大同,胡明輝,等.純電動汽車坡道自適應起步控制策略[J].重慶大學學報,2012,35(9):1-7.
[2] 金輝,葛安林,秦貴和,等.基于縱向動力學的坡道識別方法研究[J].機械工程學報,2002,38(1):79-82.
[3] 金輝,李磊,李斌虎,等.基于加速度區間判斷的坡道識別方法[J].中國公路學報,2010(1):122-126.
[4] 王玉海,董瑞先,王松,等.基于SAE J1939協議的重型車輛坡道識別實時算法[C].2010中國汽車工程學會年會論文集,2010.
[5] 張榮輝,賈宏光,陳濤,等.基于四元數法的捷聯式慣性導航系統的姿態解算[J].光學精密工程,2008,16(10):1963-1970.
[6] 段棟棟.高精度MEMS陀螺儀的濾波算法研究[D].成都:電子科技大學,2014.
[7] KHOSHNOUD F,DE SILVA C W.Recent advances in MEMS sensor technology-biomedical applications[J].IEEE Instrumentation&Measurement Magazine,2012,15(2):14-24.
[8] 梁延德,程敏,何福本,等.基于互補濾波器的四旋翼飛行器姿態解算[J].傳感器與微系統,2011,30(11):56-58.
[9] 梁麗娟.基于機器人及軍用導航系統的MEMS陀螺儀性能研究[D].北京:北京交通大學,2011.
[10] 苑艷華,李四海,南江.基于卡爾曼濾波器的航姿系統測姿算法研究[J].傳感技術學報,2011,24(12):1718-1722.
[11] XIAO D,GHOSH B K,XI N,et al.Sensor-based hybrid position/force control of a robot manipulator in an uncalibrated environment[J].IEEE Transactions on Control Systems Technology,2000,8(4):635-645.
[12] LI M,XIANG C,JIA P,et al.A study on a dynamic algorithm for vehicle attitude by using rotary encoder[J].Automotive Engineering,2014,36(7):857-861.
[13] LU X,WANG P,GAO B,et al.Model predictive control of AMT clutch during start-up process[C].Chinese Control and Decision Conference(CCDC),2011:3204-3209.
[14] GU Q,CHENG X.Study on optimal slip ratio identification and traction control for electric vehicle[C].Mechatronic Science,E-lectric Engineering and Computer(MEC),2011 International Conference on.
A Research on Slope Recognition with Pure Electric Vehicles Based on Inertia Compensation and MEMS
Luo Shi1,Zheng Chao2&Zhu Changshun2
1.Automotive and Traffic Engineering of Jiangsu University,Zhenjiang 212013;2.Mechanical Engineering of Jiangsu University,Zhenjiang 212013
A slop recognition principle based on inertia compensation and MEMS is introduced in this paper.Specifically,inertia compensation method is adopted to decompose the gravity component in MEMS three-axis accelerometer,which is then used to correct three-axis angular velocity in MEMS gyroscope module.The rotation relationship between vehicle coordinate system and inertial coordinate system is expressed by quaternion,which is then transformed into Euler angles to calculate the angle of slope electric vehicle is currently running on.The results of real vehicular tests show that the scheme used has high accuracy,good real-time performance,and is easy to implement in MCU.
electric vehicle;slope recognition;inertia compensation;Kalman filtering;MEMS gyroscope;MEMS accelerometer
10.19562/j.chinasae.qcgc.2017.08.012
?江蘇省高校重大基礎研究項目(13KJA58001)資助。
原稿收到日期為2016年8月21日。
鄭超,碩士研究生,E-mail:874722877@qq.com。
