基于ACC系統的目標車輛換道與出入彎道狀態辨識算法?
2017-09-15 05:04:20郭應時朱永振
汽車工程 2017年8期
王 暢,山 巖,趙 佳,郭應時,朱永振
基于ACC系統的目標車輛換道與出入彎道狀態辨識算法?
王 暢,山 巖,趙 佳,郭應時,朱永振
(長安大學汽車學院,西安 710064)
自適應巡航控制(ACC)系統利用雷達對前方目標進行追蹤,當前車進行換道或進出彎道時,ACC系統無法區分這兩種狀態,容易引發交通沖突。針對此問題,本文中通過實際駕駛試驗,獲取了前車不同運動狀態的數據,采用道路曲率估算值、前車行駛軌跡的斜率及其變化率和前車與自車之間橫向距離作為表征參數,結合車-路協同運動特征,建立了前車換道與進出彎道的識別模型,并利用實測數據對模型的有效性進行了驗證。結果表明:當自車處于直道時,對前車換道和進入彎道的識別率分別達到91.46%和89.81%;當自車處于彎道時,對前車換道和駛出彎道的識別率分別達到87.06%和90.42%。
自適應巡航控制系統;換道;進出彎道;雷達;狀態辨識
前言
自適應巡航控制(adaptive cruise control,ACC)系統利用雷達或者其他傳感器來追蹤識別前方的車輛,自動控制車速,跟隨前車保持一定距離行駛,在緊急情況下能自主制動,這在提高跟車安全性的同時也降低了駕駛人的操作負荷。ACC系統運行過程中,主要的控制算法可分為目標判斷和自車速度控制兩大類。當ACC系統確定跟隨目標后,根據前車的速度和加減速特性,實時調整自車的速度,這是ACC系統控制算法的核心問題。實際使用效果表明,目前ACC系統依然存在一些尚待解決的問題,其目標判斷算法目前還存在提升的空間。裝備ACC系統的車(自車)與前方目標車輛(前車)都處于直道、或都處于彎道狀態下,利用雷達傳感器所返回的相對角度和相對距離數據,結合自車的轉向盤轉角和車身橫擺角速度數據,可實現對前方目標的準確分類[1],確定自車需要跟隨前方哪個目標行駛,這類算法目前已在ACC系統中得到應用[2]。
ACC系統工作過程中,當前車換道離開自車車道、或前車換道進入自車車道時,ACC系統須相應地做出反應,否則會引發嚴重的交通沖突。當自車處于直道,前車進入彎道、或自車處于彎道,而前車駛出彎道時,這兩種情形下的雷達數據與前車換道狀態下的數據十分相似。在這種狀況下,ACC系統無法有效區分前車換道和進出彎道的行為,致使ACC系統的控制算法出現紊亂,引發自車的異常加減速,存在較大的安全隱患。針對上述問題,國內外學者開展了研究。文獻[3]中提出了一種利用前車運動狀態估計本車未來行駛軌跡的方法識別前方車輛進出彎道和換道行為。文獻[4]中利用多項式擬合行駛軌跡的方法來區分前車換道和進入彎道行為。文獻[5]和文獻[6]中利用相對速度和相對角度的變化規律區分前車的換道和進入彎道行為。文獻[7]中設計了一種考慮交通流特性的ACC系統算法,文獻[8]中提出了考慮換道過程的ACC系統控制算法。
現有的研究中,大部分的目標識別算法并不針對ACC自車與前方目標車處于不同曲率半徑路段的情況,而ACC系統實際使用過程中經常需要在這種場合工作。相關算法的缺失使ACC系統容易出現失誤,這對車輛的安全運行存在不利影響。有的研究對ACC系統在彎道路段運行的工況進行了仿真。但真實道路交通環境下,車載傳感器所獲取的數據存在較大的干擾因素,基于仿真環境得到的研究結論無法直接運用于實車環境。
針對上述需求,并考慮ACC系統目前對前車加減速變化的響應算法已較成熟,本文中將研究內容聚焦于ACC系統如何面對其他車輛行駛狀態切換所帶來的干擾問題。具體地說,利用自車的車速、橫擺角速度和前車與自車的相對角度、相對距離計算自車及前車的行駛軌跡。當自車處于直道行駛時,利用前車的軌跡斜率及其變化特征識別前車的換道和進入彎道行為。當自車處于彎道行駛時,利用前車的橫向距離變化特征識別前車的換道和駛出彎道行為,實現對前車行駛狀態的準確識別。
1 目標車輛行駛軌跡計算
車輛的行駛軌跡對表征車輛行駛狀態具有重要作用,根據車輛的行駛軌跡可判斷車輛的換道和彎道行駛情況。本文中通過建立基礎坐標系,利用自車的速度和橫擺角速度計算不同時刻自車在基礎坐標系中的位置,以此得到自車行駛軌跡。然后利用雷達數據計算前車相對于自車的位置關系,得到前車行駛軌跡。行駛軌跡計算所需參數如表1所示。

表1 行駛軌跡需求參數
1.1 軌跡點坐標計算
以自車前保險杠正中心為原點,以垂直于車身前后軸并指向車輛前方的方向為y軸、以垂直于y軸指向車身右側的方向為x軸建立笛卡爾坐標系,如圖1所示。

圖1 車輛軌跡點坐標示意圖
車輛在正常行駛過程中所形成的軌跡為不規則曲線,如果把車輛行駛軌跡分割成很短的線段(例如0.1s內的行駛軌跡),則這些線段可以近似看作直線或者圓弧曲線,由此有

式中:v為車輛速度;ω為車身橫擺角速度;Δt為時間步長;ΔL為車輛在一個時間步長內經過的距離;Δ?為車身在一個時間步長內旋轉的角度。
把曲線OA近似為圓弧曲線,所以三角形OAB為等腰三角形:

根據幾何關系,得到A點在第n個坐標系中的位置:

由式(4)可計算tn+1時刻車輛在坐標系n中的位置,再通過式(1)可計算tn+1時刻車輛在之前任何坐標系中的位置。以此類推,最終得到自車第n+1個軌跡點在基礎坐標系中的坐標(xH(n+1,1),

按照同樣的方法可獲得前方車輛在不同時刻的坐標數據。
1.2 道路曲率的估算
前面計算得到的車輛行駛軌跡為一系列離散坐標點,無法利用離散坐標點直接表示道路線形。利用多項式擬合軌跡坐標點,再求解擬合道路曲率[9]。
由于路面不平、減速帶或噪聲的影響,計算得到的行駛軌跡點誤差較大,所以在計算道路曲率之前先對行駛軌跡數據進行均值濾波處理,以降低噪聲干擾。利用四次多項式擬合車輛行駛軌跡坐標點。對于某平滑曲線y=f(x),曲線上某點處的曲率為

車輛行駛軌跡點的四次擬合方程為

將式(7)代入式(6)得

2 前車行駛狀態識別模型的建立
把前車在道路上的行駛狀態分為穩定狀態和非穩定狀態,其中穩定狀態是指前車與自車在同一道路線形(直線或彎道)中穩定行駛,不發生車道變換和線形切換。非穩定狀態是指前車和自車在不同道路線形之間切換(由直道進入彎道或由彎道進入直道)或者前車發生換道[10]。
2.1 自車處于直道時前車行駛狀態識別模型
當自車處于直道,前車開始換道或進入彎道時,其行駛軌跡的斜率由零逐漸變大,并且行駛軌跡斜率會發生突變,所以利用行駛軌跡的斜率變化特征可識別前車的非穩定行駛狀態。前車行駛軌跡斜率為
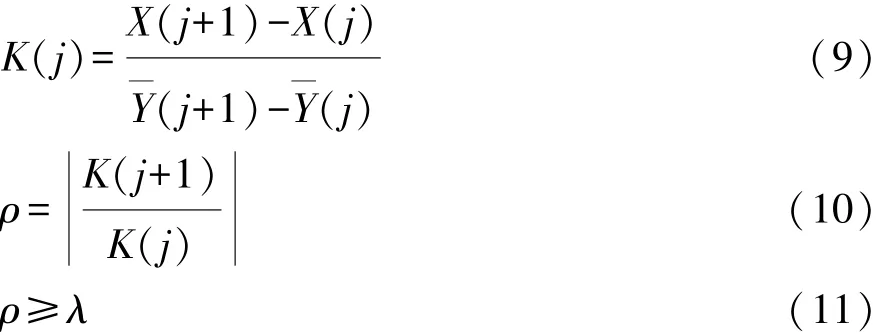
式中:X 為橫向位移;Y為縱向位移;K為行駛軌跡斜率;ρ為相鄰斜率的比值;λ為常數。若式(11)成立,則表明前車行駛軌跡斜率變化較大,有可能進入非穩定行駛狀態。
當自車處于直道行駛時,前車進入彎道軌跡的斜率成遞增趨勢,不同次數的多項式均有很好的擬合優度。前車換道狀態下,前車軌跡的斜率先單調遞增,達到最高點后再逐漸減小,因此高次多項式對換道軌跡斜率有很好的擬合優度,而低次多項式擬合優度不高。因此,本文中利用高次多項式來擬合前車換道和進入彎道軌跡斜率,并利用確定系數R2檢驗擬合的質量。
2.2 自車處于彎道時前車行駛狀態識別模型
自車處于彎道路段穩定行駛時,若前車換道或駛出彎道,兩車在垂直于車道線方向上的橫向距離會發生變化,利用該距離的變化規律識別前車的行駛狀態。軌跡點無法直接計算前車與自車在垂直于車道線方向上的距離,所以利用二次多項式f(x)擬合自車最后記錄得到的s個軌跡點,計算前車當前軌跡點距離二次曲線f(x)的距離d,以此代替兩車在垂直于車道線上的距離。
采用與2.1節中類似的方法,可識別出前車是否進入非穩定狀態。當識別到前車進入非穩定狀態后,暫停坐標系更新,計算并記錄兩車的距離d,當記錄的軌跡點數據個數達到m時利用直線對橫向距離d的斜率進行擬合,并且軌跡點個數每增加Δm個進行擬合一次,直到擬合結果能識別出前車的換道和駛出彎道行為為止。
3 識別模型驗證
3.1 驗證數據的來源
為驗證本文中所建立模型的有效性,基于小型乘用車設計開發了試驗車,對20余名普通駕駛人進行了實際道路駕駛試驗。試驗過程中駕駛人不佩戴任何儀器,駕駛過程與平常駕駛過程相同。試驗線路主要為城市快速環道和高速公路,每名被試者試驗時長約1h。試驗過程中,安裝于車輛上的各種傳感器同步實時采集車輛運動狀態參數、交通環境參數和駕駛人操作行為參數,采樣頻率為20Hz。
與本文中模型密切相關的參數中,r和α來源于安裝于車輛前保險杠中央的ESR微波雷達,距離測量范圍為0~200m,精度為0.25m。角度測量范圍為±45°,精度為0.5°。橫擺角速度ω來源于安裝于車輛中央的陀螺儀,型號為IMU02,測量精度為0.01°/s;車速v來源于車身CAN總線網絡,測量精度為0.01km/h。轉向盤轉角θ來源于車身CAN總線網絡,精度為1°。
3.2 自車處于直道時前車狀態識別
(1)前車換道行為的識別
當道路曲率半徑大于2 000m時,彎道就會變得不明顯,所以設定當道路曲率半徑小于2 000m時認為道路屬于彎道,否則屬于直道。
令n=5,即對行駛軌跡做均值濾波時,計算相鄰5個軌跡點的平均坐標值。λ設為2.4,設m=20,Δm=5,即從前車被識別為進入非穩定行駛狀態開始到進行第一次擬合之間的時間為2.0s,并且每隔0.5s擬合一次,直到識別出前車的具體行駛狀態為止。δ值設為0.55,此時前車換道和進入彎道的識別率基本相同。設ω=15,即車輛橫向位移連續變化次數小于15時,認為是車輛在車道線內的擺動,當橫向位移連續變化次數大于15時,則認為前車可能發生換道或進入彎道行為。
隨機選擇前車的某次換道過程,此過程中自車的速度為80km/h,此過程中,根據前述模型得到前車軌跡如圖2所示。
從圖中可以看出,前車在t=3.1s時(軌跡圖a點)開始換道,在t=6.8s換道結束(軌跡圖b點),整個換道過程持續3.7s。前車狀態識別結果如圖3所示,預識別結果為0表示前車處于穩定行駛狀態,預識別結果為1表示前車處于非穩定行駛狀態。識別結果為0表示前車處于穩定行駛狀態,識別結果為1表示前車換道,識別結果為2表示前車進出彎道。
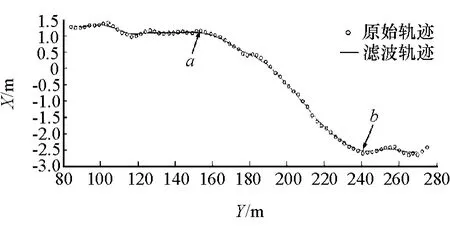
圖2 v=80km/h前車換道軌跡
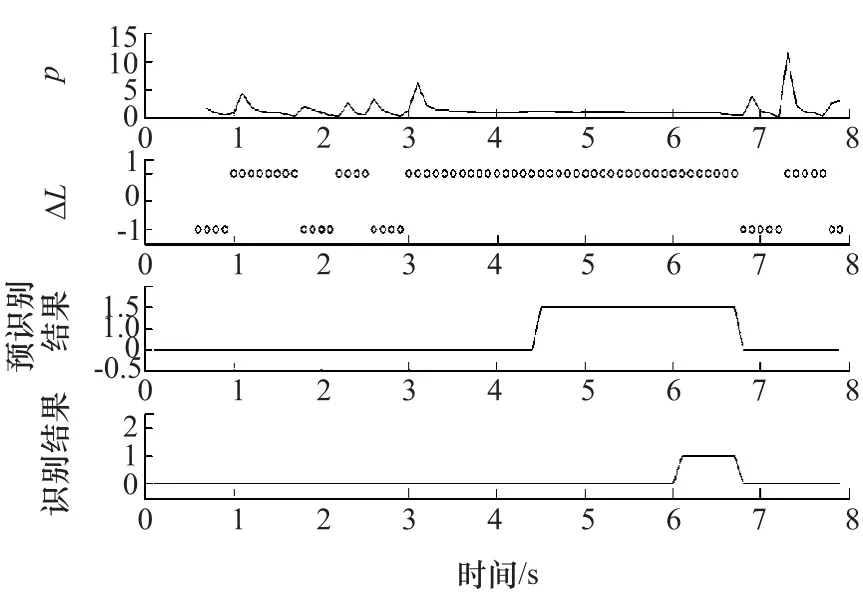
圖3 v=80km/h前車換道識別結果
在換道開始前和換道結束后,前車軌跡斜率比值多次大于2.4,但是前車橫向距離連續變大或變小點數不超過15個,所以判定為前車穩定行駛,預識別結果為0。當t=3.1s時,軌跡斜率比值為6.207,同時前車的橫向距離從3.0s開始持續變小,到4.5s時連續變化個數達到15個,所以在4.5s時判定前車進入非穩定行駛狀態,預識別結果變為1。t=6.9s時,軌跡斜率比值再次變大,同時前車的橫向距離開始變大,說明非穩定行駛狀態結束,預識別結果為0。
雖然在4.5s時識別為前車進入非穩定行駛狀態,但換道開始時間為軌跡斜率比值第一次大于λ的時間,所以從軌跡斜率比值第一次大于λ開始收集數據進行軌跡斜率擬合。3.1至5.1s,3.1至5.6s,3.1至6.1s前車軌跡斜率對直線的擬合確定系數分別為0.955,0.533和0.172,在5.6和6.1s連續兩次的擬合確定系數均小于0.55,所以在t=6.1s時識別為前車換道,識別結果為1,即換道識別結果延遲3.0s。當非穩定行駛狀態結束時,換道行為結束,識別結果同時變為0。隨機挑選的82組數據中,有75次被準確識別,識別耗費時間分布在2.0~3.0s之間,總體識別率為91.46%。
(2)前車進入彎道的識別
當自車以約70km/h的速度接近彎道路段時,前車進入彎道場景如圖4所示。

圖4 R=500m前車入彎監控視頻
前車入彎識別結果如圖5所示。

圖5 R=500m前車入彎識別結果
從圖中看出,前車在進入彎道后,橫向距離開始持續變大,到達2.9s時連續變化位移達到15個。行駛軌跡斜率比值在1.6s達到最大10.78,所以t=2.9s時判定為前車進入非穩定行駛狀態,預識別結果為1,比進入彎道時間延遲1.3s。1.6至3.6s,1.6至4.1s和1.6至4.6s前車的軌跡斜率對直線的擬合確定系數分別為0.978,0.929和0.897,所以t=4.1s前車識別為進入彎道,識別結果為2,比前車進入彎道延遲2.7s。總的驗證數據中共有108組前車進入彎道的數據,其中97組被正確識別,識別率為89.81%。
3.3 自車處于彎道時前車狀態識別
自車處于彎道時和自車處于直道時兩車橫向距離的變化特征基本相同,所以彎道行駛時的識別模型參數和直道行駛時的識別模型參數相同,即n=5,λ=2.4,δ=0.55,ω=15。令s=60,即利用二次多項式擬合自車行駛軌跡的最后60個軌跡點,然后計算前車到軌跡點擬合曲線的距離。
(1)前車換道行為的識別
自車處于彎道行駛時,某次前車換道過程中獲取的數據如圖6所示。

圖6 自車處于彎道行駛時前車換道軌跡
自車處于彎道行駛時前車換道的識別結果如圖7所示。
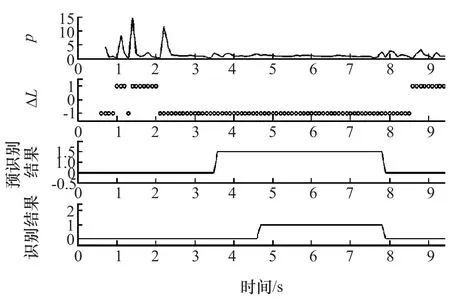
圖7 自車處于彎道行駛時前車換道識別結果
從圖中可以看出,兩車橫向距離在t=2.1s時開始連續增加,達到3.6s時連續變化位移達到15個,同時橫向距離曲線的斜率比值在t=2.2s時達到11.51,所以在3.6s識別為前車進入非穩定行駛狀態,預識別結果為1。2.2至4.2s和2.2至4.7s時兩車橫向距離斜率對直線的擬合確定系數分別為0.086 67,0.013 4,連續兩次小于0.55,所以前車在4.7s時被識別為換道,識別結果為1,時間延遲2.5s。在t=7.8s時橫向距離斜率比值為2.601,前車非穩定行駛狀態結束,預識別結果重新變為0。總的驗證數據中共隨機挑選了85次數據,其中本文模型識別出了74次,總的準確率為87.06%。
(2)前車駛出彎道的識別
自車處于彎道行駛時,某次前車駛出彎道獲取的數據如圖8所示。
自車處于彎道行駛時前車出彎識別結果如圖9所示。

圖8 自車處于彎道行駛時自車和前車出彎軌跡

圖9 自車處于彎道行駛時前車出彎識別結果
從圖中可以看出,在t=4.6s時橫向距離斜率比值達到最大值23.7,同時橫向距離開始持續變大,到6.1s時連續變化位移達到15個,所以在6.1s識別為前車進入非穩定行駛狀態,預識別結果變為1。在4.6至6.6s,4.6至7.1s和4.6至7.5s橫向距離斜率對直線的擬合確定系數分別為0.767 4,0.855 1和0.844,全部大于0.55,所以前車在t=7.1s被識別駛出彎道,識別結果變為2,比實際出彎時間延遲2.5s。當自車駛出彎道時,前車非穩定行駛狀態結束。驗證數據中共有94次前車駛出彎道的數據,其中85次被準確識別,總的識別率為90.42%。
4 結論
(1)利用自車運動狀態追蹤數據,結合自車與前車的相對運動狀態數據,可實時追蹤前車的運動軌跡,具有良好的追蹤精度。
(2)前車換道、進出彎道的狀態從雷達數據角度而言較相似,通過采用道路曲率估算值、前車行駛軌跡的斜率及斜率比值和前車與自車之間橫向距離作為表征參數,結合車-路協同運動特征,實現了對前車狀態的識別,具有較好的精度。
(3)從車載安全系統的需求而言,盡早確定前車狀態可有效提升系統的可靠性,但如果過早地確定前車狀態又容易出現誤判斷,如何在實際車載環境下協調這兩者的矛盾有待今后進一步研究。
[1] 高振海,王竣,王德平,等.汽車前方靜動目標狀態轉移機理與分類算法[J].汽車工程,2016,38(5):638-645.
[2] 高振海,嚴偉,李紅建,等.基于模擬駕駛員多目標決策的汽車自適應巡航控制算法[J].汽車工程,2015,37(6):667-673.
[3] 陳達興.自適應巡航控制系統中前方有效目標識別算法研究[D].長春:吉林大學,2011.
[4] 耿石峰.基于軌跡分析的自適應巡航系統目標識別方法研究[D].長春:吉林大學,2015.
[5] 張德兆.基于彎道行駛的車輛自適應巡航控制[D].北京:清華大學,2011.
[6] ZHANG D,LI K,WANG J.Radar-based target identification and tracking on a curved road[J].IMechE Part D:Journal of Automobile Engineering,2012,226(1):39-47.
[7] Van AREM B,Van DRIEL C J G,VISSER R.The impact of cooperative adaptive cruise control on traffic-flow characteristics[J]. IEEE Transactions on Intelligent Transportation Systems,2006,7 (4):429-436.
[8] IOANNOU P A,STEFANOVIC M.Evaluation of ACC vehicles in mixed traffic:lane change effects and sensitivity analysis[J]. IEEE Transactions on Intelligent Transportation Systems,2005,6 (1):79-89.
[9] RAJAMANI R,ZHU C.Semi-autonomous adaptive cruise control systems[J].IEEE Transactions on Vehicular Technology,2002,51 (5):1186-1192.
[10] MILANéS V,SHLADOVER S E,SPRING J,et al.Cooperative adaptive cruise control in real traffic situations[J].IEEE Transactions on Intelligent Transportation Systems,2014,15(1):296-305.
[11] RAJAMANI R,ZHU C.Semi-autonomous adaptive cruise control systems[J].IEEE Transactions on Vehicular Technology,2002,51(5):1186-1192.
An Algorithm for State Identification of Lane Change and Curve Entry/Exit of Target Vehicle Based on ACC System
Wang Chang,Shan Yan,Zhao Jia,Guo Yingshi&Zhu Yongzhen
School of Automobile,Chang'an University,Xi'an 710064
Adaptive cruise control(ACC)system uses radar to track preceding target,but it is unable to distinguish whether the preceding vehicle is doing lane change or entering/exiting curved road,easily leading to traffic conflict.Aiming at this problem,the data of preceding vehicle in different running states are collected by driving test.The estimated values of road curvature,the slope and its changing rate of preceding vehicle trajectory,and the lateral distance between host vehicle and preceding vehicle are taken as characteristic parameters.With consideration of the cooperative characteristics between vehicle and road,an identification model for lane change and curve entry/exit of preceding vehicle is established with its effectiveness verified by road test data.The results show that when the host vehicle is on a straight road,the recognition rate of lane change and curve entry of preceding vehicle reaches 91.46%and 89.81%respectively;and when the host vehicle is on a curved road,the recognition rate of lane change and curve exit of preceding vehicle reaches 87.06%and 90.42%respectively.
ACC system;lane change;curve entry/exit;radar;state identification
10.19562/j.chinasae.qcgc.2017.08.011
?國家自然科學基金項目(61374196)、陜西省自然科學基金項目(2016JQ5096)和中央高校基本科研業務費專項資金項目(310822151028,310822171118,310822161009)資助。
原稿收到日期為2016年11月28日,修改稿收到日期為2017年2月13日。
王暢,副教授,E-mail:wangchang0905@163.com。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
中等數學(2022年2期)2022-06-05 07:10:50
中學生數理化·七年級數學人教版(2021年11期)2021-12-06 05:38:48
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
小學生學習指導(低年級)(2020年6期)2020-07-25 02:31:36
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
小學生學習指導(低年級)(2018年9期)2018-09-26 05:59:44
瘋狂英語·新讀寫(2018年2期)2018-09-07 09:32:10
