星形人字齒輪傳動系統振動模式的理論研究
2017-09-14 00:57:03郝立峰王三民王飛鳴
中國機械工程 2017年17期
關鍵詞:模態
郝立峰 王三民 王飛鳴
1.西北工業大學機電學院,西安,7100722.中國航空工業集團公司沈陽發動機設計研究所,沈陽,110015
星形人字齒輪傳動系統振動模式的理論研究
郝立峰 王三民 王飛鳴
1.西北工業大學機電學院,西安,7100722.中國航空工業集團公司沈陽發動機設計研究所,沈陽,110015
采用集中質量法建立了含N個星輪的星形人字齒輪傳動系統的彎-扭-軸耦合動力學模型和動力學方程。模型中將人字齒輪看作由兩斜齒輪通過無質量彈簧連接而成。求解了系統的固有圓頻率和固有振型,根據振動模式將星形人字齒輪傳動系統的固有振動模式進行分類,并對其重根數和固有頻數個數進行了理論研究。結果表明:星形人字齒輪傳動系統含有4種典型振動模式,即:中心構件軸向-扭轉耦合模態(重根數r=1),星輪模態(重根數r=N-3,N>3),中心構件平動模態(重根數r=2),星輪與中心輪耦合模態(重根數r=2)。
星形人字齒輪;傳動系統;耦合模態;星輪模態;平動模態
0 引言
星形齒輪傳動在航空領域得到廣泛應用[1]。星形傳動系統中的噪聲和振動問題一直是齒輪傳動領域研究的重點。國外學者LIN等[2]分析了單節點三自由度的直齒行星齒輪系統固有特性,將其模態分成三類并進行了證明;KIRACOFE等[3]將直齒行星齒輪傳動的理論分析模型擴展到了多級行星傳動;PARKER[4]提出通過調整嚙合相位差來抑制系統的三種振動模式;基于對直齒行星傳動振動模式的分類,LIN等[5-6]對直齒行星傳動系統的模態靈敏度進行了分析,得出了系統模態對于系統參數靈敏度的解析表達式,并在此基礎上分析了直齒行星傳動模態躍遷的相關規律,為系統參數選擇提供了指導。國內學者林何等[7]對斜齒行星傳動系統模態進行分類并研究了它的非線性特性;卜忠紅[8]研究了人字齒行星傳動系統固有特性,并對其模態進行了分類和證明;任菲等[9]研究了太陽輪浮動對行星人字齒輪傳動的動態特性的影響。
本文建立了星形人字齒輪系統彎-扭-軸耦合動力學模型,將人字齒輪等效為由退刀槽相連的左右兩斜齒,研究系統固有特性,將系統模態進行分類,證明了人字齒輪傳動4種典型模態,前3種模態與LIN等[2]對直齒行星傳動系統分類得出的3種模態類似,第4種星輪與中心輪耦合模態為人字齒特有的新型模態,此研究為單級和多級星形人字齒輪振動抑制及相位調諧機理的研究打下了理論基礎。
1 動力學模型及方程的建立
人字齒星形傳動減速器彎-扭-軸耦合動力學模型如圖1所示,它由太陽輪s、內齒圈r及N(N為星輪個數)個星輪p組成(圖1中量符號下標ξ=c,s,r)。其中,太陽輪和內齒圈分別作為輸入、輸出構件,星輪通過星形架與機架固連;內齒圈為組合式,采用兩個旋向相反的斜齒輪拼接而成,太陽輪和各星形輪為整體式。圖1中β為人字齒輪基圓螺旋角;ksp、krp分別為太陽輪星輪和星輪內齒圈單邊斜齒嚙合剛度。在動力學模型中,將單個人字齒輪分為左右斜齒兩部分,每一部分考慮x、y、z、θz四個自由度,系統共有8N+20個自由度;各星輪沿周向均勻分布,且質量、支撐剛度等參數均相同;人字齒輪左右側完全對稱。下文中量符號的下標s、pn、c、r分別代表太陽輪、星輪、星形架、內齒圈的相關參量,下標L、R表示人字齒輪的左右側兩部分相關參量。
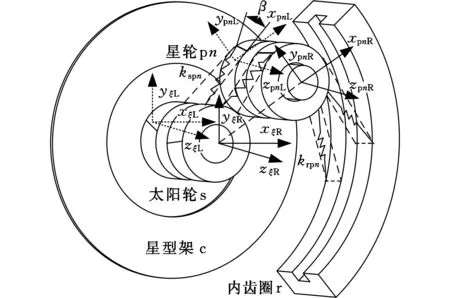
圖1 星形人字齒輪傳動動力學模型Fig.1 Dynamical model of double-helical star geartransmission
模型構件較多,采用有限元思想建立動力學模型[10]。圖2表示第n個星輪與太陽輪嚙合,其中第n個星輪的安裝角φn=2π(n-1)/N;齒輪副的嚙合線平面與中心構件y軸夾角為ψspn,且有

圖2 太陽輪-星輪n齒輪副動力學模型Fig.2 Dynamic model of sun-starn pair
(1)
式中,α為系統人字齒輪端面壓力角。
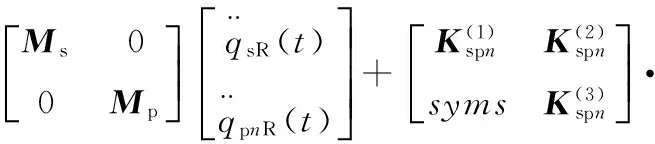
以太陽輪星輪右側單邊嚙合為例,導出單邊嚙合動力學方程如下:
(2)
(3)
其中,ms、Js、rs,mpn、Jpn、rpn分別為太陽輪和星輪單側質量、繞z軸轉動慣量、基圓半徑。pspnR(t)為人字齒右側沿齒輪嚙合線方向相對嚙合位移。sα=sinα,cα=cosα,其余類推。
合并式(2)、式(3),并整理為矩陣形式:

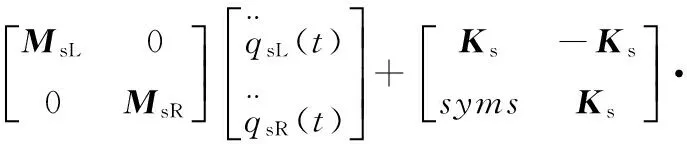
以太陽輪兩側斜齒之間耦合矩陣推導為例說明左右側斜齒連接矩陣的推導過程,如圖2所示,左右側齒輪連接無阻尼運動方程如下:
(4)
(5)
其中,kssx、kssy、kssz、kssθ分別表示太陽輪退刀槽的徑向、軸向、豎向和旋轉剛度。合并式(4)、式(5),并整理為矩陣形式:
同理得星輪和內齒圈連接矩陣Kp、Kr。
如圖3所示,以第n個星輪單側與星形架耦合為例,導出單邊星輪與星形架耦合方程如下:
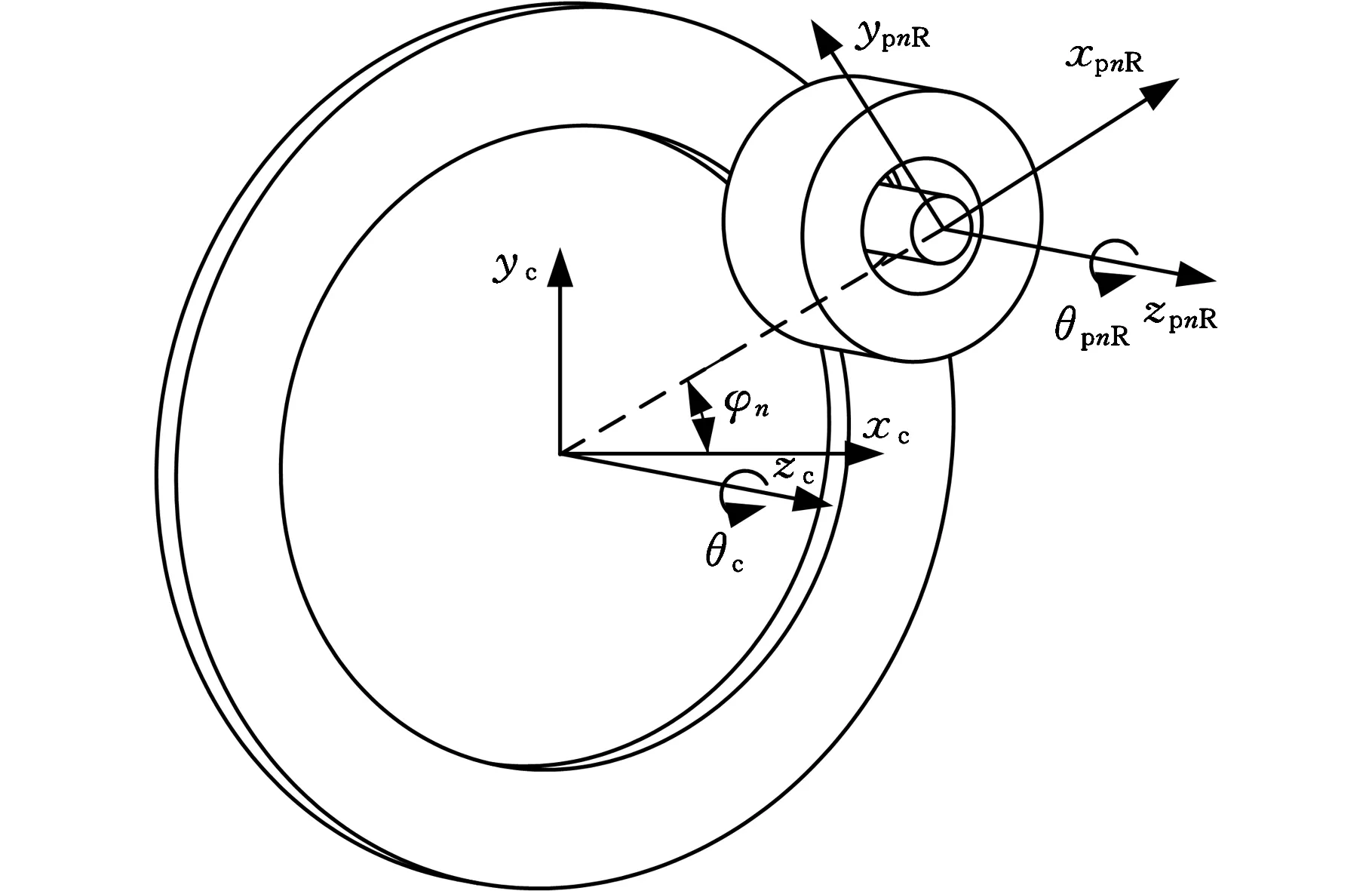
圖3 星輪n-星形架耦合動力學模型Fig.3 Dynamic model of star-carriern pair
(6)
(7)
式中,kp、kpz為星輪與星形架之間的徑向支撐剛度、軸向支撐剛度;rc為星輪旋轉中心至星形架旋轉中心距離,rc=rs+rp。
合并式(6)、式(7),并整理為矩陣形式:
按有限元思想,系統無阻尼自由振動方程如下:

K=Kb+KL+Km
KL=
Km=
Ks=diag(kssx,kssy,kssz,kssθ)
Kp=diag(kppx,kppy,kppz,kppθ)
Kr=diag(krrx,krry,krrz,krrθ)
式中,Kb、KL、Km分別為支撐剛度矩陣、左右側耦合矩陣、嚙合副耦合矩陣;kζ、kζz、kζθ(ζ=c,s,pn,r)分別為構件徑向支撐剛度、軸向支撐剛度、軸向扭轉剛度,n=1,2,…,N。




行星人字齒輪傳動剛度矩陣與星形傳動剛度矩陣區別僅是支撐剛度矩陣Kb中軸向扭轉剛度取值不同。對于星形傳動,ksθ、krθ為0,kcθ為非0;對于行星傳動,ksθ、kcθ為0,krθ非0。因而下文證明對行星傳動也是適用的。
2 固有特性規律

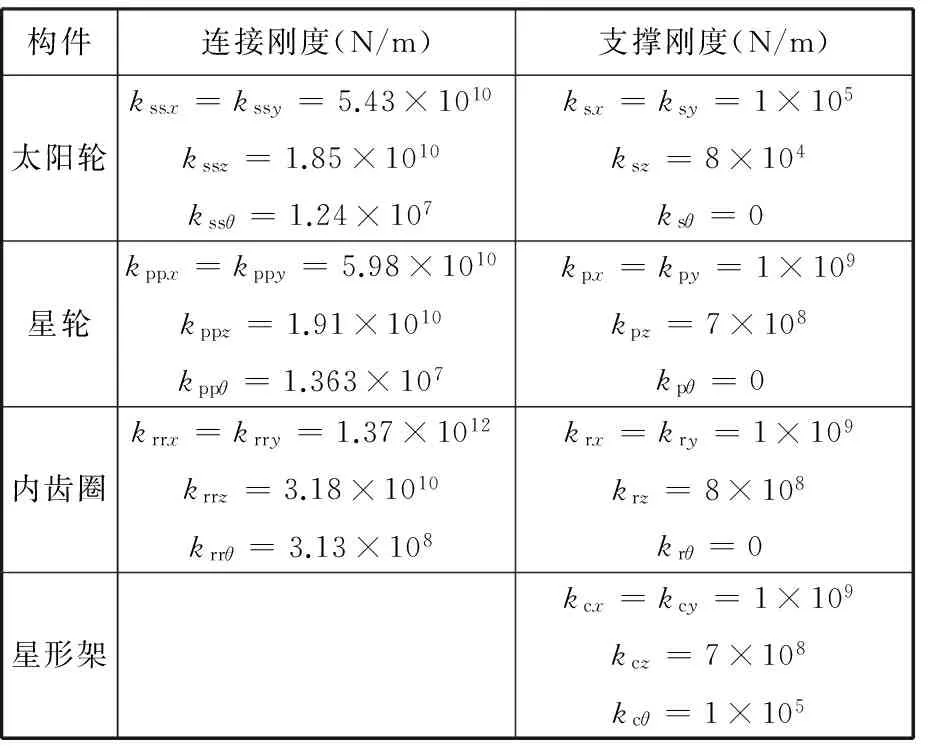
表1 傳動系統剛度參數

表2 傳動系統構件參數
分析固有圓頻率及振型,系統模態分為四類,振型如圖4所示,圖中黑點和實線表示振動振型所決定的構件位置,虛線表示構件靜平衡位置。
(1)中心構件軸向-扭轉耦合模態18個(重根數r=1),固有圓頻率數值見表3第1欄,振型如圖4a所示。振型特征為:中心構件平動振型坐標為0,僅有軸向和扭轉;星輪振型相同。
(2)星輪模態8個(重根數r=N-3),此模態只有當N>3時才會出現,固有圓頻率數值大小與星輪個數無關。頻率數值見表3第4欄,振型如圖4b所示。其振型特征為:中心構件不動;星輪振型成比例變化。
(3)中心構件平動模態7個(重根數r=2),頻率數值見表3第2欄,振型如圖4c所示。其振型特征為:中心構件軸扭振型坐標為0,僅有平動;人字齒左右兩側振型z向相反,其他相同。
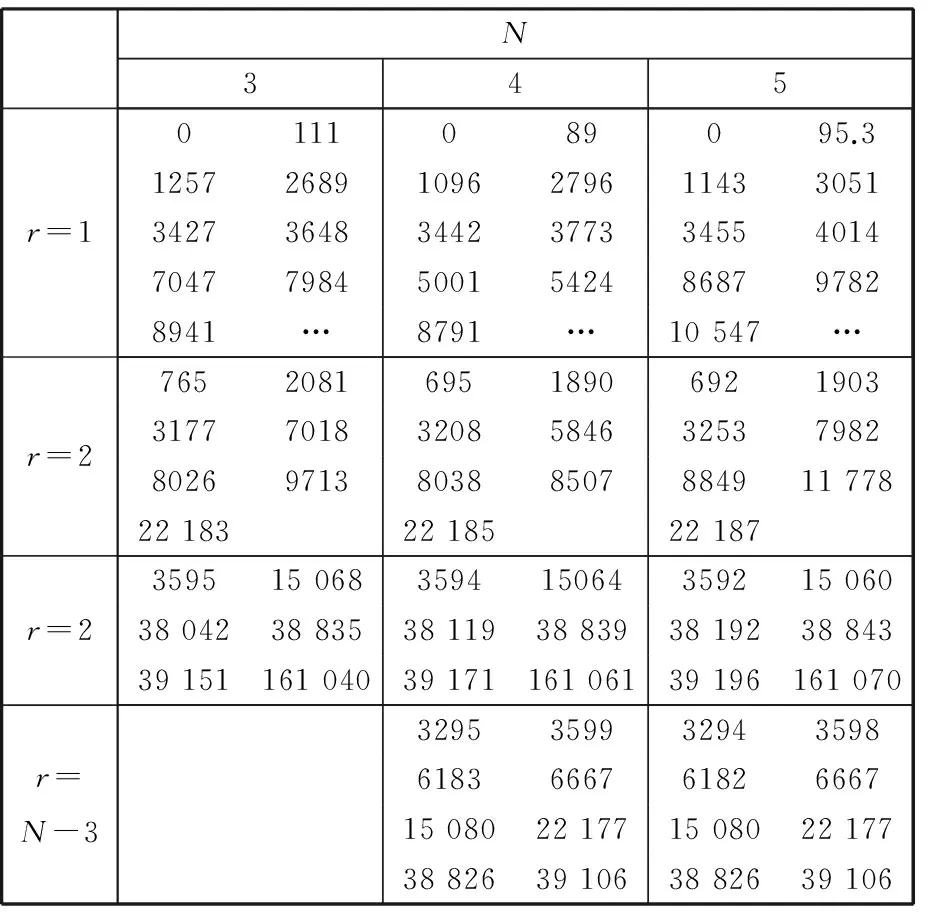
表3 系統固有圓頻率(rad/s)及其重根數與星輪個數關系
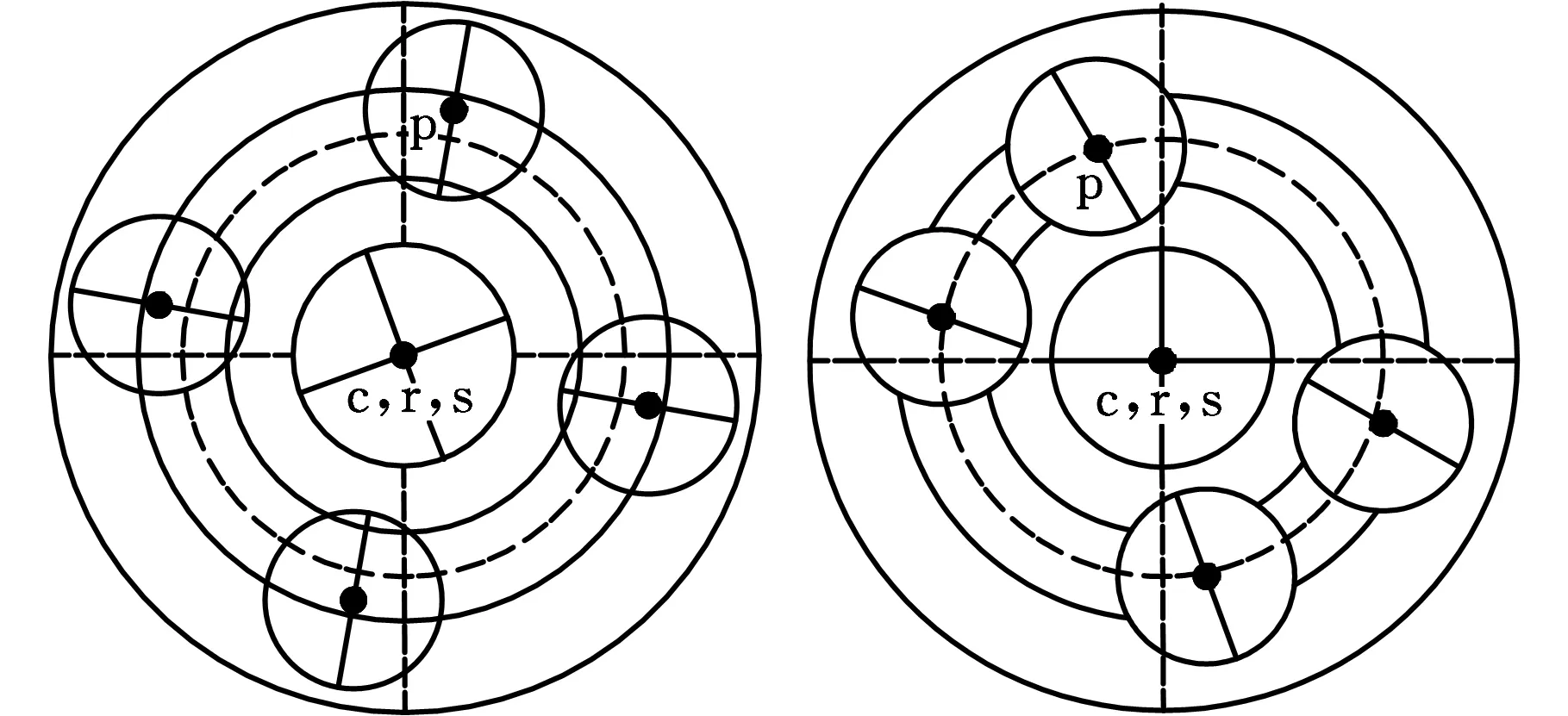
(a)中心構件軸向-扭轉耦合模態 (b)星輪模態

(c)中心構件平動模態 (d)星輪與中心輪耦合模態圖4 星形人字齒輪傳動四種模態振型Fig.4 Vibration modes of the double-helical star gear transmission system
(4)星輪與中心輪耦合模態6個(重根數r=2),頻率數值見表3第3欄,振型如圖4d所示。其振型特征為:中心構件除星形架不動外,其他平動;同側星輪振型成比例變化;人字齒左右兩側振型z向相同,其他相反。
前三類模態與LIN等[2]提出的直齒行星齒輪模態相似,第四類模態是由于自由度數增多而產生的全新模態。
3 固有特性規律的證明
為了證明其振型規律,假設系統的固有圓頻率為ωk,對應振型為Φk,則
Φk=(Pc,PrL,PsL,P1L,…,PrR,PsR,P1R,…)T
Pξ=(xξ,yξ,zξ,θξ)ξ=
(Pc,PrL,PsL,P1L,…,PrR,PsR,P1R,…)
分塊代入整理后可得
(8)

(9)

(10)

(11)

(12)

(13)

(14)
系統模態的求解問題轉化為對式(8)~式(14)特征值ωk及其對應振型的求解問題。
3.1中心構件軸向-扭轉耦合模態證明
中心構件軸向-扭轉耦合模態的振型特征如下式所示:
(15)
中心構件只有軸扭,同側星輪的振型相同。
將Φk代入式(8)~式(10)、式(12)、式(13)整理得
(16)

(17)

(18)

(19)

(20)

(21)

(22)

(23)

(24)

(25)
將Φi代入式(11)和式(14)得到:

(26)

(27)
系統的固有圓頻率求解轉化為求解式(15)中所含18個變量的特征值ωk的問題,式(16)~式(27)共有18個方程,聯立后可以計算得到18個固有圓頻率和其對應振型。
3.2星輪模態證明
此振型的特征如下式所示:
(28)
中心構件不動,單側星輪成比例運動,其中,λn為常數。
將Φi代入式(8)~式(10)、式(12)、式(13)整理得
(29)
(30)
(31)
(32)
(33)
(34)
(35)

3.3中心構件平動模態證明
3.3.1等價性結論的證明
在證明此模態之前,首先證明以下結論:式(9)~式(11)和式(12)~式(14)對應等價的前提條件是人字齒左右側振型滿足以下兩個條件之一。兩個條件為:①中心構件平動,左右側振型z向相反,其他項相同;②中心構件平動,左右側振型z向相同,其他項相反。由于篇幅限制,僅對振型滿足條件①時式(11)和式(14)的等價性進行證明,其他證明過程類似。
式(11)、式(14)中的(Ⅲ)表達式如下:
sψrpncβsβxr+sψspncβsβxs+τκzp-
cψrpncβsβyr+cψspncβsβys=0
(36)
-sψrpncβsβxr+cψrpncβsβyr-τκzp-
sψspncβsβxs-cψspncβsβys=0
(37)

3.3.2中心構件平動模態證明

(38)

將Φk代入式(8)~式(10)得

(39)
(40)
(41)
(42)

(43)
(44)
易于證明:
(45)
(46)
3.4星輪中心輪耦合模態證明
(47)
固有頻率個數以及重數證明過程如下。
將Φk代入式(8)~式(10)得出:
(48)

(49)

(50)

(51)

易于證明:
(52)
(53)
星輪振型成比例變化證明過程如下。為了表示方便,引入如下中間變量:
εs=ksp(-sαc2β,-cαc2β,cβsβ,c2βrp)T
εr=krp(-sαc2β,cαc2β,cβsβ,c2βrp)T
-η(ωk)P1=εs(sαxs+cαys)+εr(sαxr-cαyr)
(54)

(55)

(56)

(57)
整理式(56)、式(57)得
(58)
將式(58)代入式(54)、式(55)可得

4 結論
(1)中心構件軸向-扭轉模態18個(重根數r=1)。其振型特征為:中心構件平移振型坐標為0,僅有軸扭;同側星輪振型相同。
(2)星輪模態8個(重根數r=N-3),此模態只有當N>3時才會出現,固有圓頻率數值大小和星輪個數無關。其振型特征為:中心構件不動;同側星輪振型成比例變化。
(3)中心構件平動模態7個(重根數r=2)。其振型特征為:中心構件僅有平動;人字齒左右兩側振型坐標z相反,其他相同。
(4)星輪中心輪耦合模態6個(重根數r=2)。其振型特征為:中心構件除星形架不動外,其他均只有平動;星輪振型呈比例;人字齒左右兩側振型坐標z向相同,其他相反。
(5)星形傳動的四類振型特征同樣適用于同自由度數的行星人字齒輪傳動系統。
[1] 黃春峰, 姚艷玲, 蔣明夫. GTF發動機技術性能和應用前景分析[J]. 航空制造技術,2012,409(13):34-38. HUANG Chunfeng, YAO Yanling, JIANG Mingfu. Analysis on Technical Performance and Application Prospect of GTF Engine [J]. Aeronautical Manufacturing Technology,2012,409(13):34-38.
[2] LIN J, PARKER R G .Analytical Characterization of the Unique Properties of Planetary Gear Free Vibration[J]. Journal of Vibration and Acoustics,1999,121(7):316-321
[3] KIRACOFE D R, PARKER R G. Structured Vibration Modes of General Compound Planetary Gear Systems[J]. Journal of Vibration & Acoustics, 2007, 129(1):511-526.
[4] PARKER R G. A Physical Explanation for the Effectiveness of Planet Phasing to Suppress Planetary Gear Vibration[J]. Journal of Sound & Vibration,2000,236(4):561-573.
[5] LIN J, PARKER R G. Sensitivity of Planetary Gear Natural Frequencies and Vibration Modes to Model Parameters[J]. Journal of Sound & Vibration,1999,228(1):109-128.
[6] LIN J, PARKER R G. Natural Frequency Veering in Planetary Gears[J]. Mechanics of Structures & Machines,2001,29(4):411-429.
[7] 林何, 王三民, 董金城. 斜齒行星齒輪傳動系統振動模式與動載特性[J]. 航空動力學報,2015,30(9):2298-2304. LIN He,WANG Sanmin,DONG Jincheng.Virbration Mode and Dynamical Characteristics of Helical Planetary Gear Train [J]. Journal of Aerospace Power,2015,30(9):2298-2304.
[8] 卜忠紅.人字齒行星傳動系統的動態特性研究[D].西安:西北工業大學,2011. BU Zhonghong. Research on Dynamic Characteristics of Planetary Gear Train with Herringbone Gears [D]. Xi’an:Northwestern Polytechnical University,2011.
[9] 任菲, 秦大同, 吳曉鈴. 考慮制造誤差的人字齒行星傳動均載特性[J]. 中南大學學報(自然科學版),2016,47(2):474-481. REN Fei, QIN Datong, WU Xiaoling. Load Sharing Performances of Herringbone Planetary Gears Considering Manufacturing Errors[J]. Journal of Central South University (Science and Technology),2016,47(2):474-481.
[10] PRASHANT S. Dynamic Modeling of Double-helical Planetary Gear Sets[D]. Columbus: The Ohio State University,2012.
[11] 王琳杰, 王三民, 歐陽斌,等. 功率四分支齒輪傳動彎扭耦合動力學特性研究[J]. 振動與沖擊,2014,33(13):161-165. Wang Linjie, WANG Sanmin, OUYANG Bin, et al. Lateral-torsional Coupling Dynamics Characteristics of Power Split Transmission with Four Branches[J]. Journal of Vibration and Shock,2014,33(13):161-165.
(編輯王艷麗)
TheoreticalResearchofVibrationModesforDouble-helicalStarGearTransmissionSystems
HAO Lifeng WANG Sanmin WANG Feiming
1.School of Mechanical Engineering, Northwestern Polytechnical University,Xi’an,710072 2.Shenyang Engine Design and Research Institute,Aviation Industry Corporation of China, Shenyang,110015
Dynamics model and dynamics equations with coupled bent-torsional-axial of a double-helical star gear transmission system was established based on the lumped mass method. The double-helical gears were treated as two helical gears with opposite spiral angle connected by massless spring which had the bending, torsion and axial stiffnesses. The natural cyclic frequencies and vibration modes of the system were calculated. The structure of the vibration modes were well-defined, where the special structure resulted from the cyclic symmetry of the star herringbone gears. Vibration modes were classified into four categories and the multiplicities and numbers of the eigenvalue were analyzed. The results show that the double-helical star gear transmission system has four typical vibration modes: axial-rotational coupled vibration mode (multiplicityr=1), star gear mode (multiplicityr=N-3,N>3), center component translational vibration mode (multiplicityr=2), star gear and center gear coupled mode (multiplicityr=2).
double-helical star gear; transmission system; coupled vibration mode; star gear mode; translational vibration mode
2016-04-08
TH133
10.3969/j.issn.1004-132X.2017.17.014
郝立峰,男,1992年生。西北工業大學機電學院碩士研究生。主要研究方向為齒輪傳動系統減振降噪。王三民,男,1960年生。西北工業大學機電學院教授、博士研究生導師。王飛鳴,男,1978年生。中國航空工業集團公司沈陽發動機設計研究所高級工程師。
猜你喜歡
成都信息工程大學學報(2022年4期)2022-11-18 07:31:14
中國傳媒大學學報(自然科學版)(2021年1期)2021-06-09 08:43:12
工程與建設(2019年1期)2019-09-03 01:12:12
廣州大學學報(自然科學版)(2016年2期)2017-01-15 13:43:00
廣西科技大學學報(2016年1期)2016-06-22 13:10:37
湖北經濟學院學報·人文社科版(2015年8期)2015-12-29 05:53:07
上海電機學院學報(2015年4期)2015-02-28 14:30:00
計算物理(2014年2期)2014-03-11 17:01:39
振動工程學報(2014年4期)2014-03-01 01:15:31
電影新作(2014年1期)2014-02-27 09:07:36