基于曲率與車速的兩點智能控制駕駛員模型*
2017-09-12 01:23:00楊浩黃江李正網李攀韓中海
汽車技術 2017年8期
楊浩黃江李正網李攀韓中海
(1.重慶理工大學,汽車零部件制造及檢測技術教育部重點實驗室,重慶 400054;2.重慶人文科技學院,重慶 401524)
基于曲率與車速的兩點智能控制駕駛員模型*
楊浩1黃江1李正網2李攀1韓中海1
(1.重慶理工大學,汽車零部件制造及檢測技術教育部重點實驗室,重慶 400054;2.重慶人文科技學院,重慶 401524)
為了提高駕駛員模型的路徑跟蹤精度,基于模糊邏輯智能控制器建立了一種依據道路曲率、車速,采用遠、近兩點預瞄的智能駕駛員模型。該模型根據目標道路的曲率自適應地選擇預瞄距離遠、近兩點,根據不同的車速和預瞄點的橫向偏差決策出最優轉向盤轉角。對所建立的駕駛員模型與CarSim駕駛員模型進行仿真測試對比,結果表明,該模型能夠在反應滯后的情況下完成復雜道路、極限工況的駕駛員操作,路徑跟蹤誤差較CarSim模型小。
1 前言
大多數交通事故是由駕駛員操縱不當和車輛失穩造成的,因而駕駛員模型成為近幾年研究的熱點領域。目前,駕駛員模型主要有交叉頻率模型[1]、最優預瞄控制模型[2]、預瞄最優曲率模型[3]、神經網絡模型[4]和模糊模型[5]。由于駕駛員注意力分配問題和反應滯后因素[3],駕駛員模型的路徑跟蹤會出現較大誤差,因此前三者具有擬線性的駕駛員模型不能用于精確描述駕駛員的非線性行為。神經網絡雖然適用于非線性,但需要大量的數據作為訓練樣本,這給研究造成了一定難度。模糊邏輯控制器基于專家經驗設計[6],不需要精確的數學模型和樣本數據,能很好地適用于非線性系統,采用模糊邏輯控制的駕駛員模型在一定程度上能反映人的思維和駕駛行為[7],因此,本文基于郭孔輝院士提出的“預瞄最優曲率駕駛員模型”,結合模糊邏輯控制器建立了一種基于道路曲率、車速與兩點預瞄的智能控制駕駛員模型。
2 最優預瞄控制模型
MacAdam在駕駛員模型建模中結合最優控制理論,提出了最優預瞄控制模型[2]。此模型主要使車輛實際路徑與期望路徑的橫向誤差平方和最小,取得了高精度的路徑跟蹤效果。
該模型得到的最優轉向盤轉角[8]為:

式中,δs(t)為輸入轉角;ε(t+Tp)為響應誤差;g(Tp)為傳遞函數;Tp為駕駛員預瞄時間。
由式(1)可知,最優轉向盤轉角由輸入轉角、響應的誤差和傳遞函數決定。
3 預瞄最優曲率駕駛員模型
郭孔輝院士提出了“預瞄—跟隨理論”[3],本文在此基礎上建立了預瞄最優曲率駕駛員模型。該模型根據車輛實際行駛的橫向位移與理想的期望道路橫向位移的誤差決策出最優轉向盤轉角,使車輛具有較好的路徑跟蹤精度。
為了保證車輛轉向時車輪均作純滾動,所有車輪的軸線須相交于一點,即轉向中心。對于兩軸汽車,內轉向輪偏轉角δ2應大于外轉向輪偏轉角δ1。將車輪視為剛體(忽略輪胎的彈性變形),車輛的最小轉彎半徑為:

車輛實際行駛過程中,轉彎半徑可近似表示為:

式中,L為軸距;δmax為最大外轉向輪偏轉角;δ為轉向輪轉角的均值。
從實際行駛工況來看,車輛絕大多數情況下都行駛在小曲率的道路上,車輪的轉角小,sinδ可近似為δ,由式(3)可得道路曲率的通式:

車輛的橫向加速度為:

式中,δsw為轉向盤轉角;i為轉向系傳動比;v為車速。
由上述分析可知,駕駛員很容易掌握道路曲率與轉向盤轉角的正比關系,視線預瞄到前方一定曲率的道路時,及時轉動轉向盤跟隨路徑。
假設車輛跟隨的軌跡中心線橫向位移方程為f(t),如圖1所示,并設在所研究的t時刻,車輛的瞬時橫向位移為y=y(t),橫向速度為y′=y′(t)。此時駕駛員向前預瞄的距離為d,相應的預瞄時間T=d/v,駕駛員預瞄點的橫向位移為f(t+T)。此時道路的曲率為1/R,駕駛員選擇轉向盤轉角δsw來跟蹤期望路徑,汽車的橫向加速度為y″(t)。(t+T)時刻車輛的橫向位移為:

根據最小誤差原理,駕駛員總會用一個最優的轉向盤轉角δ*sw來決策出一個最優的軌跡曲率1/R*,使汽車行駛距離d(經過時間T)之后,其橫向位置y(t+T)與該處的預期軌跡坐標f(t+T)相一致。在軌跡曲率不大的情況下,由式(6)可得最優橫向加速度為:
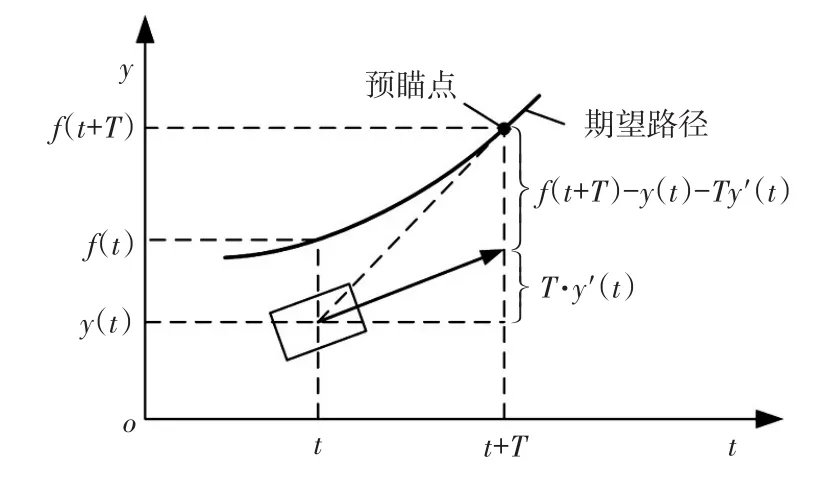
圖1 預瞄最優曲率駕駛員模型

最優軌跡曲率為:

由式(4)可得最優轉向盤轉角為:

低速工況下駕駛員與車輛的閉環控制系統如圖2所示。考慮到實際操作中駕駛員不可避免地存在神經反應滯后和操縱滯后效應,上述駕駛員模型用一個環節“I”來代替理想轉向盤轉角到實際轉向盤轉角的傳遞,,其中e-tds用于考慮神經反應滯后因素,一般取反應滯后時間td=0.1 s[3],用一階慣性環節-1/(1+Ths)來考慮駕駛員的反應滯后因素,一般取操縱滯后時間Th=0.2 s[3]。因此如果忽略以上滯后因素,實際轉向盤轉角與理想轉向盤轉角相等,這樣根據式(9)確定最優軌跡曲率1/R*,并參考車輛轉向系傳動比i和軸距L確定最優轉向盤轉角δ*sw,駕駛員以此操縱車輛。
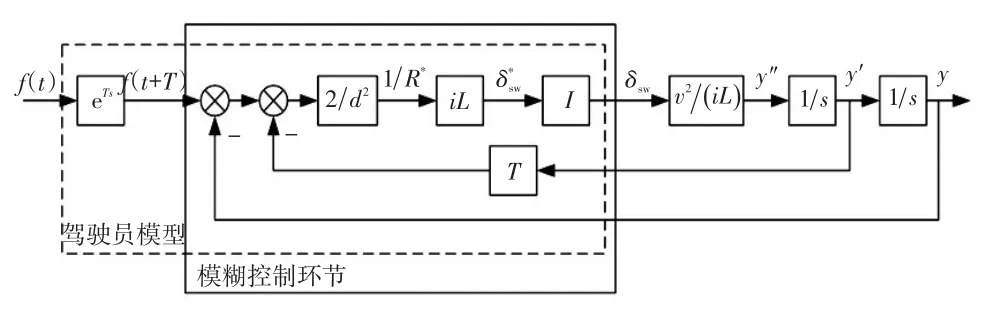
圖2 低速時駕駛員-汽車閉環系統
4 基于曲率與車速的兩點智能控制駕駛員模型
基于郭孔輝院士的預瞄理論,該模型首先預瞄前方道路遠、近2個點,根據生理、心理學家Land和Horwood對駕駛員在彎道行駛的行為研究[9~10]表明:駕駛員在駕駛車輛時,視線集中的范圍主要包括“遠”(車前方10~20 m)、“近”(車前方6~8 m)2個區域。因此,選擇遠點預瞄距離為15 m,近點預瞄距離為8 m,遠點主要用于車輛在曲率較小的路徑行駛,近點主要用于車輛在曲率較大的路徑行駛。駕駛員在實際路徑跟蹤時,對較小曲率的路徑,總會把目光距離放遠,以更好地跟隨路徑,反之,對較大曲率的路徑,駕駛員總會把目光距離放近,以順利通過彎道。因此,遠、近兩點的預瞄模型與駕駛員的實際駕駛行為是一致的。
參考城市道路交叉口轉彎半徑按道路紅線(道路用地的邊界線)計,主干道的范圍為20~30 m,取其均值25 m作為參考值,其道路曲率0.04作為參考值,取其1/4值0.01作為小曲率來考慮。當道路傳感器探測到目標道路曲率小于0.01時,該模型自適應選擇遠點預瞄,反之,該模型則自適應選擇近點預瞄。模糊邏輯控制器根據預瞄點的橫向誤差和當前的車速,通過模糊規則控制轉向盤轉角的輸出。由于駕駛員的反應滯后和車輛的非線性因素不可避免,要建立精確的人-車-路閉環系統模型是很難實現的,而模糊邏輯控制器能很好地適用于非線性系統,不需要精確的數學模型,因此,將模糊邏輯控制器用于調節預瞄駕駛員的軌跡誤差,同時考慮了車速可變對人-車-路閉環系統的影響,使所建立的模型更符合真實的人-車-路閉環系統。圖3給出了基于曲率與車速(模糊控制器的車速論域)的兩點智能控制駕駛員模型結構框圖。其中,誤差為經過預瞄時間T,預瞄軌跡和車輛軌跡的橫向位移之差,即e=f(t+T)-y(t)-Ty′(t),模糊邏輯控制器用于提高軌跡跟蹤精度,降低汽車轉向的振蕩。
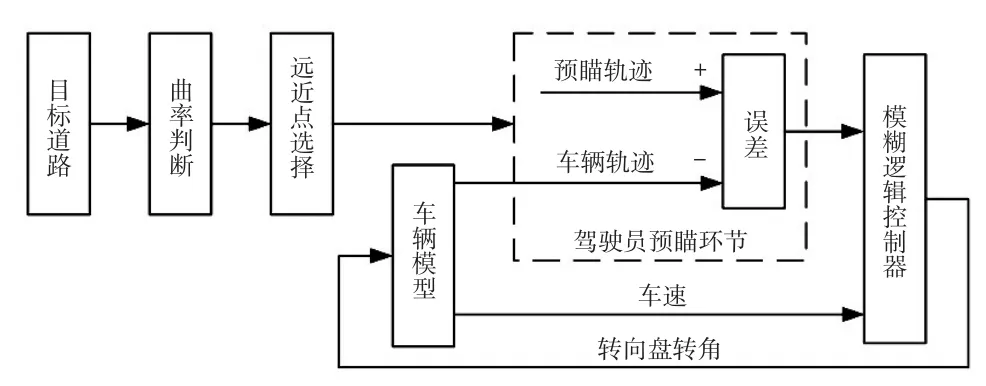
圖3 基于曲率與車速的兩點智能控制駕駛員模型結構框圖
圖4所示為模糊控制器的結構流程圖,其中,模糊化過程分兩部分。第一部分將所選擇的控制變量作為模糊控制器的語言變量。本文對模糊控制器的輸入(誤差e)定義了7個語言變量,分別是負大(NB)為-5~-3 m、負中(NM)為-4~-2 m、負小(NS)為-3~-1m、零(ZE)為-1~1m、正小(PS)為0~3 m、正中(PM)為2~4 m、正大(PB)為3~5 m;對車速定義了4個語言變量,分別是負零(NZ)為0~60 km/h、零(ZE)為50~70 km/h、正零(PZ)為60~80 km/h、正大(PB)為80~120 km/h;對模糊控制器的輸出(轉向盤實際轉角)定義了8個語言變量,分別是負大(NB)為-50°~-30°、負中(NM)為-40°~-20°、負小(NS)為-30°~-10°、負零(ZE)為-20°~0°、正零(ZM)為 -10°~10°、正 小(PS)為 0°~20°、正中(PM)為10°~30°、正大(PB)為20°~40°。第二部分定義模糊控制器輸入和輸出變量的論域,然后對整個論域進行模糊分割并給出相應的隸屬度函數,隸屬度函數選擇三角函數。對輸入變量e論域的選擇,本文參考CarSim軟件“8”字形道路和雙移線道路,道路實際寬度10 m,所以選擇預瞄點到道路中心線的誤差為±5 m,當誤差的絕對值大于5 m時,模糊邏輯控制器按正大(PB)和負大(NB)來控制,因此e的論域為-5~5 m;由于我國高速公路的最高車速為120 km/h,因此車速v的論域為0~120 km/h。實際行駛中,通常不會在曲率較大的彎道高速行駛,因此選擇車速0~80 km/h來仿真大曲率“8”字形道路,并用負零(NS)來考慮0~60 km/h較小車速的影響、用零(ZE)來考慮50~70 km/h一般車速的影響、用正零(PZ)來考慮60~80 km/h較高車速的影響、用正大(PB)來考慮80~120 km/h高速的影響。輸出轉向盤轉角δ論域為-140°~140°,將此論域轉化為-40°~40°并用3.5倍增益放大到同等論域,這樣有利于將論域整數劃分。這樣可以得到28條模糊條件語句構成的控制規則,將這些規則組合在一起可以形成模糊規則表,見表1。圖5所示為橫向誤差、車速、轉向盤轉角的隸屬度函數。
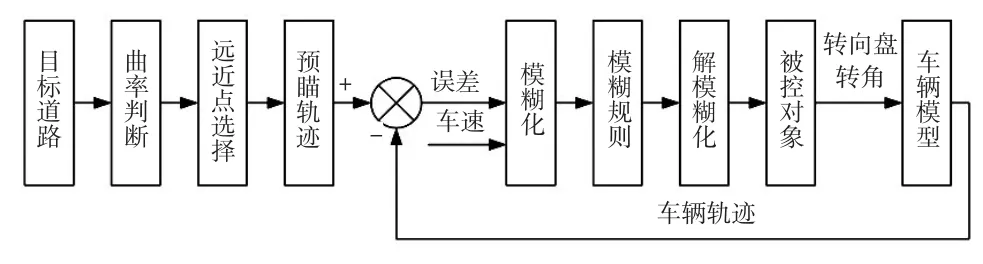
圖4 基于曲率與車速的模糊邏輯控制器結構
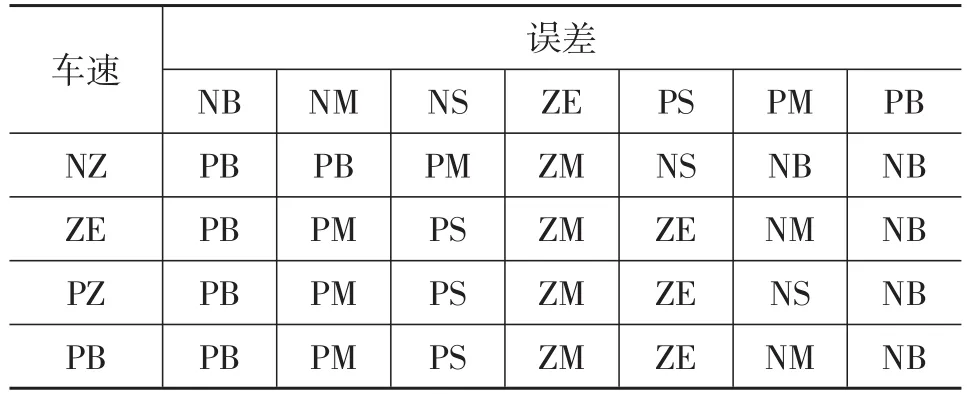
表1 模糊控制規則
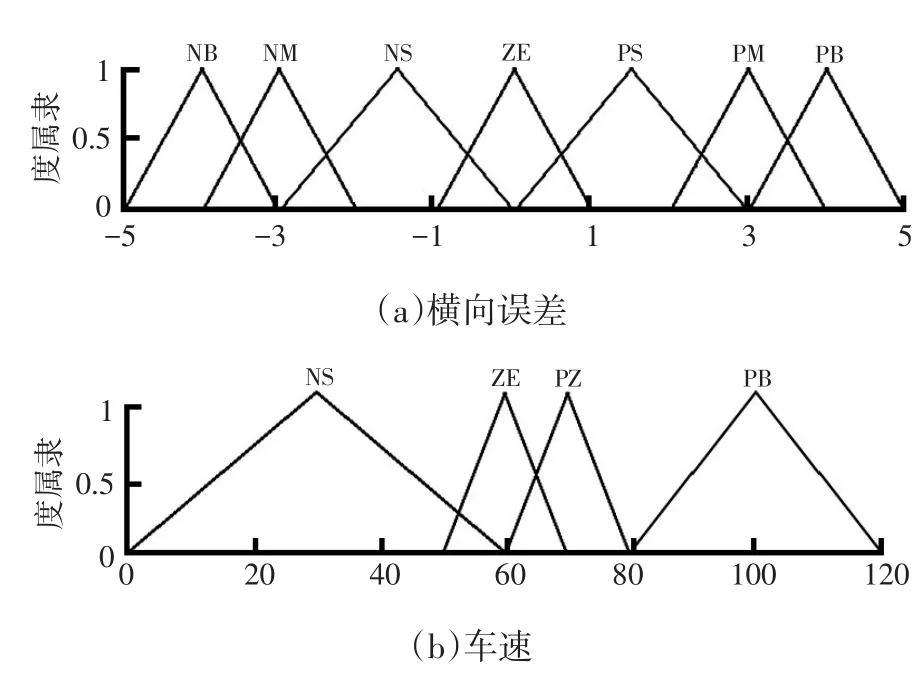
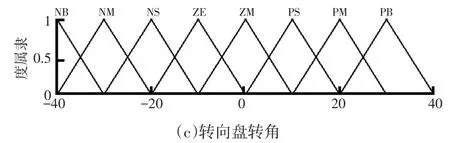
圖5 隸屬度函數
5 仿真試驗
為了檢驗上述駕駛員模型的有效性,基于CarSim和Simulink聯合仿真平臺對駕駛員轉向建模仿真。模型主要應用MacAdam的最優預瞄理論及其最新成果[11],利用誤差積分作為反饋校正(見Error Area)模塊,如圖6所示。
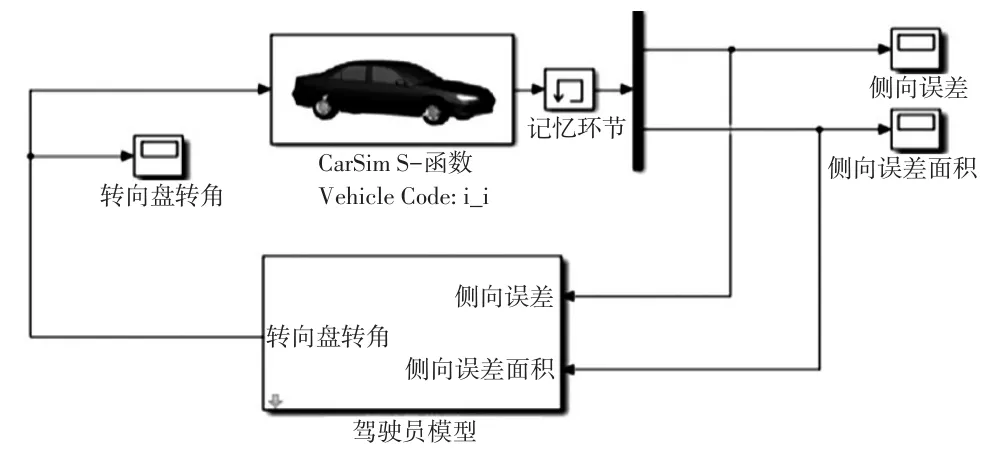
圖6 CarSim模型仿真結構
基于曲率與車速的兩點智能控制駕駛員模型與CarSim不同,該模型根據目標道路的曲率,自適應地選擇遠、近預瞄點。其預瞄點的橫向位移誤差和不同車速作為輸入參考量,同時考慮了駕駛員的反應滯后對人-車-路閉環系統的影響,根據模糊規則決策最優轉向盤轉角,其結構框圖如圖7所示(其中車輛的輸出分別為預瞄遠點、目標道路曲率、預瞄近點、車速,車輛的輸入為轉向盤轉角)。仿真中與汽車有關的參數取自CarSim軟件中包含的實際參數,見表2。模型中,用Switch結構進行曲率判斷,利用誤差和車速通過模糊控制決策出最優轉向盤轉角,最后通過適當滯后環節形成閉環控制。
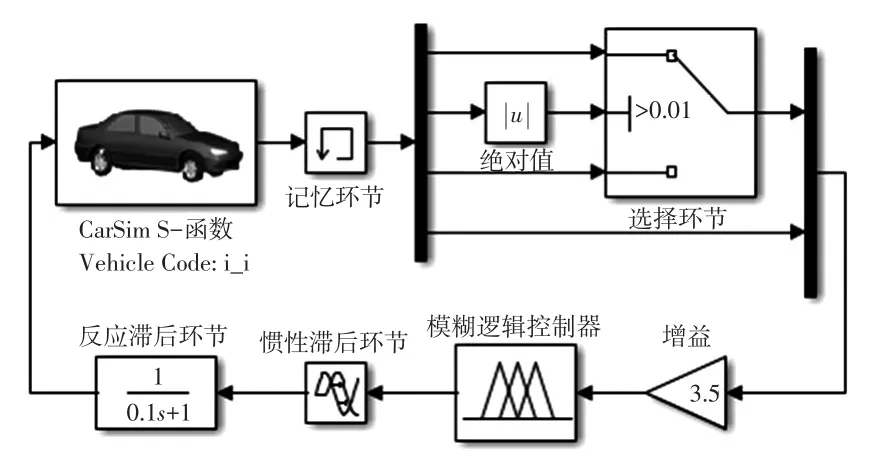
圖7 基于曲率與車速的兩點智能控制駕駛員模型仿真結構
為驗證本文設計的駕駛員模型對路徑跟蹤的有效性,選擇了“8”字形和雙移線道路對兩種駕駛員模型進行對比。“8”字形道路曲率較大,主要用于考慮車輛在急轉彎時的路徑跟蹤精度,由于駕駛員在曲率較大的轉彎工況下,通常會降低速度使車輛順利通過彎道,因此“8”字形道路車輛速度的變化范圍設定為0~80 km/h。雙移線試驗可視為對超車動作的仿真試驗,也是包括駕駛員特性在內的“閉環試驗”,在一定程度上表現出汽車轉向運動的綜合能力。由于雙移線試驗模擬的是駕駛員在真實的道路上的行車過程,有轉彎、超車、直線行駛等多種工況,車速的變化范圍大,因此將車速范圍設定為0~120 km/h。
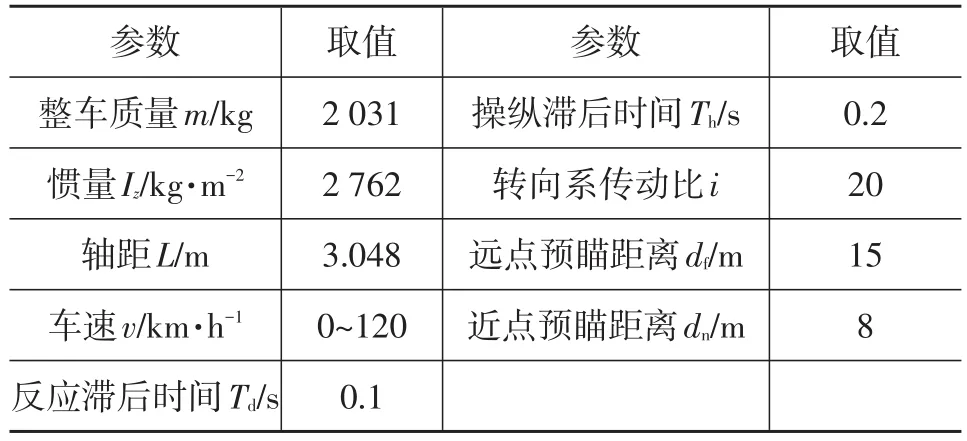
表2 車輛仿真參數表
“8”字形道路試驗結果如圖8所示。由圖8可知,使用基于曲率與車速的兩點智能控制駕駛員模型和CarSim模型的車輛均具有較高的路徑跟蹤精度,前者在前20 s的橫向位移誤差只有±0.2 m,后20 s由于車速較高誤差有所增大。而后者的橫向位移誤差為-0.8~0.6 m,在整個路徑跟蹤過程中,前者的誤差均值為0.143 m,后者為0.281 m,表明前者能很好適應曲率較大的路面,車輛急轉彎能力強,路徑跟蹤一致性較后者好,誤差更小。
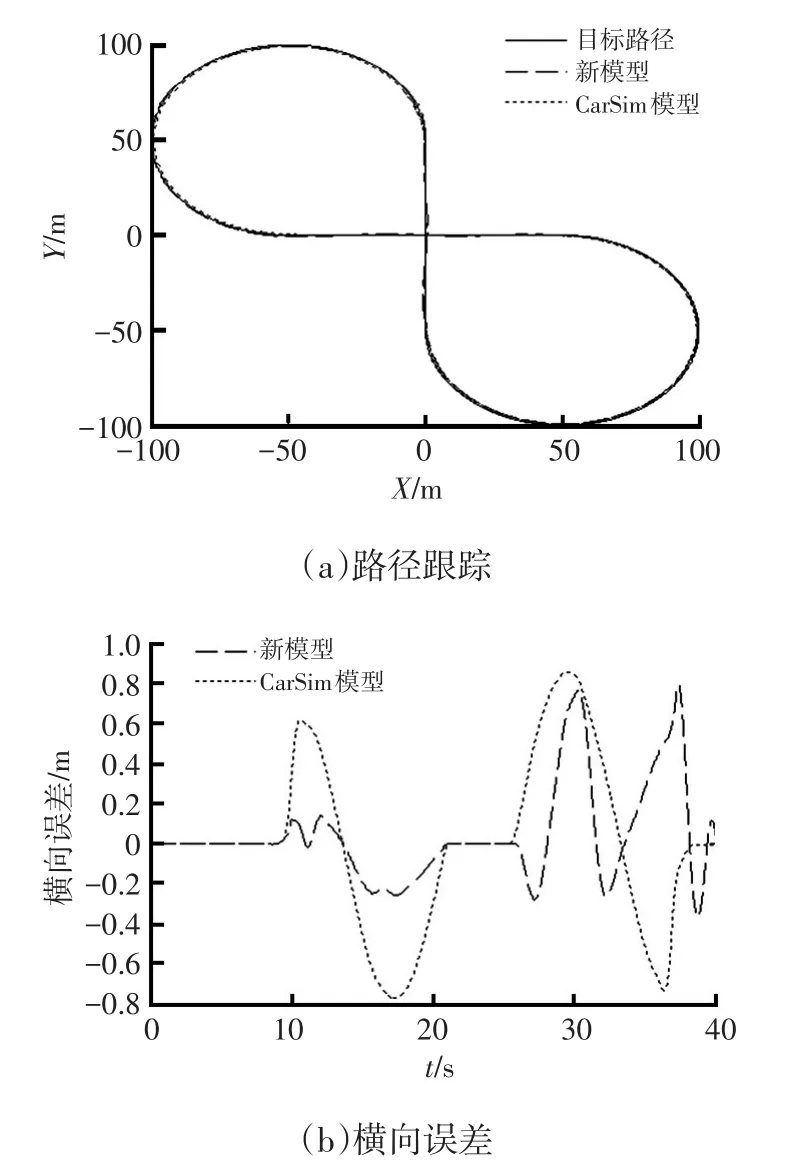
圖8“8”字形道路試驗結果
雙移線道路試驗結果如圖9所示。由圖9可知,使用本文提出的駕駛員模型的車輛路徑跟蹤軌跡更趨近目標路徑,橫向位移誤差為-0.3~0.2 m,均值為0.025 m,使用CarSim模型的車輛橫向位移誤差為±0.6 m,均值為0.085 m,表明前者路徑跟蹤精度高,跟隨效果好。
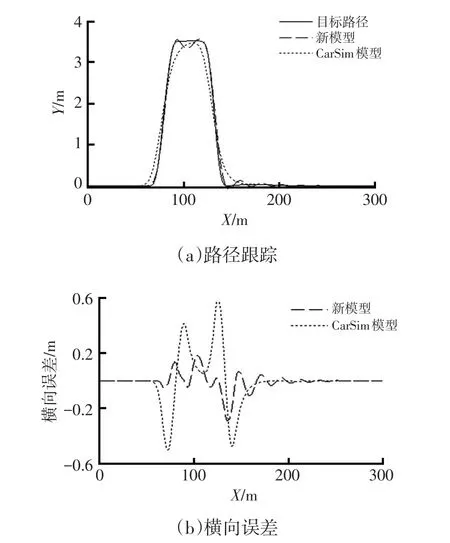
圖9 雙移線道路試驗結果
6 結束語
本文建立了一種依據道路曲率、車速,采用遠、近兩點預瞄的智能駕駛員模型,可根據目標道路曲率自適應地選擇預瞄距離不同的遠、近兩點進行預瞄,根據不同的車速和預瞄點的橫向誤差,通過模糊邏輯控制器來決策出最優的方向盤轉角。所建立的模糊邏輯控制器能很好地適用于非線性系統,能更加逼近真實的駕駛員行為,可以在復雜道路、極限工況的情況下完成駕駛任務。與CarSim模型相比,本文建立的模型在雙移線道路和“8”字形道路跟蹤精度都較好,表明該模型不僅能適應曲率較大的彎道,同時路徑跟隨效果也更好。
1 McRuer D T,Allen R W,Weir D H,et al.New results in driver steering control models.Human Factors,1997,19(4):381~397.
2 MacAdam C C.Application of an optimal preview control for simulation of closed-loop automobile driving.Transactions on Systems,Man,and Cybernetics,2007,11(6):393~399.
3 郭孔輝.汽車操縱動力學原理.南京:江蘇科學技術出版社,2011.
4 郭孔輝,潘峰,馬鳳軍.預瞄優化神經網絡駕駛員模型.機械工程學報.2003,39(1):26~29.
5 尹曉麗,李雷,賈新春.無人駕駛汽車路徑跟蹤模糊預測控制.中北大學學報,2011,32(2):136~138.
6 彭憶強.汽車電子及控制技術基礎.北京:機械工業出版社,2014.
7 Kageyama I,Pacejka H B.On a new driver model with fuzzy control.Vehicle System Dynamics,1992,20(sup1):314~324.
8 MacAdam C C.Understanding and modeling the human driver.Vehicle System Dynamics,2003,40(1-3):101~134.
9 Land M F,Lee D N,Where we look when we steer.Nature,1994,369(6483):742~744.
10 Land M,Horwood J.Which parts of the road guide steering?.Nature,1995,377(6547):339~341.
11 張慧豫.采用遠近兩點預瞄的新型駕駛員轉向模型研究:[學位論文].南京:南京航空航天大學,2012.
(責任編輯 斛 畔)
修改稿收到日期為2017年5月20日。
Two Point Intelligent Control Driver Model Based on Curvature and Speed
Yang Hao1,Huang Jiang1,Li Zhengwang2,Li Pan1,Han Zhonghai1
(1.Key Lab of Automobile Components and Parts Manufacturing and Test Technology of Ministry of Education,Chongqing University of Technology,Chongqing 400054;2.Chongqing College of Humanities,Chongqing 401524)
In order to improve the path tracking accuracy of the driver model,an intelligent driver model was established using fuzzy logic controller according to road curvature,vehicle speed,far and near two preview points.The model adaptively selected the far and near two preview points according to the curvature of the target road,and determined the optimal steering wheel angle according to different vehicle speeds and the lateral deviation of the aiming point.The driver model was compared with the CarSim driver model,which showed that the model can perform driver’s operations under the conditions of complicated road and extreme conditions,meanwhile,the path tracking error was smaller than the CarSim model.
Driver model,Road curvature,Far and near two points,Vehicle speed,Fuzzy logic controller
駕駛員模型 道路曲率 遠近兩點 車速 模糊邏輯控制器
U469.7 文獻標識碼:A 文章編號:1000-3703(2017)08-0038-05
國家自然科學基金項目(51105136)。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
汽車實用技術(2022年14期)2022-07-30 06:13:42
汽車實用技術(2022年7期)2022-04-20 11:44:42
汽車實用技術(2022年4期)2022-03-07 06:07:20
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
汽車電器(2018年1期)2018-06-05 01:22:54
光學精密工程(2016年6期)2016-11-07 09:07:19
公民與法治(2016年4期)2016-05-17 04:09:26
核科學與工程(2015年4期)2015-09-26 11:59:03
