基于圖像特征的車臉柵格的定位方法*
2017-09-11 14:24:28張有芬李玉惠
傳感器與微系統(tǒng) 2017年9期
關(guān)鍵詞:方法
張有芬, 李玉惠, 潘 藝
(1.昆明理工大學(xué) 信息工程與自動化學(xué)院,云南 昆明 650500; 2.云南省智能交通系統(tǒng)工程技術(shù)研究中心智能圖像處理研究室,云南 昆明 650500)
基于圖像特征的車臉柵格的定位方法*
張有芬1,2, 李玉惠1,2, 潘 藝1,2
(1.昆明理工大學(xué) 信息工程與自動化學(xué)院,云南 昆明 650500; 2.云南省智能交通系統(tǒng)工程技術(shù)研究中心智能圖像處理研究室,云南 昆明 650500)
為了解決智能交通系統(tǒng)中車型識別的瓶頸,找到能夠準(zhǔn)確定位車標(biāo)的方法,提出了在Adaboost算法定位出的車臉的基礎(chǔ)上,對車臉圖像進(jìn)行二值化處理,經(jīng)過二值化圖像的水平梯度和垂直梯度的投影定位柵格的方法,為后續(xù)車標(biāo)的識別提供了一種新的方法。經(jīng)過實(shí)驗(yàn)驗(yàn)證:方法無論從理論上還是實(shí)際應(yīng)用中,具有重要的意義。
Adaboost; 車標(biāo)識別; 車標(biāo)定位; 柵格定位
0 引 言
車輛識別是智能交通系統(tǒng)研究的重要內(nèi)容之一[1]。車輛圖像信息具有信息量大,成本低等眾多優(yōu)勢[2],因此,利用圖像信息進(jìn)行車型識別是智能交通系統(tǒng)研究的主流方向。文獻(xiàn)[3,4]中將交通標(biāo)志原始圖片先通過一級由均值聚類學(xué)得濾波器的卷積神經(jīng)網(wǎng)絡(luò),得到的結(jié)果再同時通過一級卷積和一級遞歸神經(jīng)網(wǎng)絡(luò),將得到的特征向量經(jīng)過分類器進(jìn)行分類。此外,交通圖像信息也廣泛用于車型的識別。目前,車牌的識別技術(shù)已經(jīng)日臻成熟,然而對于一些諸如套牌、倒牌等現(xiàn)象,對車輛識別研究提出了更高的要求,即不能僅根據(jù)車輛號碼和車型完成車輛的識別,因此,車標(biāo)的識別技術(shù)有待進(jìn)一步的研究和探索。車標(biāo)識別技術(shù)包括車標(biāo)定位和車標(biāo)識別兩個步驟,首先需要解決車標(biāo)定位問題,只有準(zhǔn)確地將車標(biāo)定位,才能進(jìn)行目標(biāo)車輛的車標(biāo)識別,否則,將導(dǎo)致車標(biāo)識別錯誤甚至無法識別。
目前,提出了多種車標(biāo)識別的方法,文獻(xiàn)[5]首先根據(jù)車輛本身的對稱性等先驗(yàn)知識粗略確定車標(biāo)位置,然后利用特征信息精確定位;最后將模板匹配和特征結(jié)合對其進(jìn)行識別。文獻(xiàn)[6]根據(jù)車標(biāo)具有豐富邊緣信息的特征,應(yīng)用梯度方向直方圖(histogram of oriented gradients,HOG)的特征值,采用支持向量機(jī)(support vector machine,SVM)的分類工具實(shí)現(xiàn)了車標(biāo)的快速檢測與識別。該方法對車標(biāo)圖像在圖片中所占的百分比有一定要求,若,背景成分過多會導(dǎo)致 SVM 分類器難以線性收斂,造成錯誤率增高。由于車標(biāo)占整個圖像的比例較小,加大了準(zhǔn)確定位的難度,因此根據(jù)車臉格柵圖像特征定位車標(biāo)能夠使得車標(biāo)的圖像信息豐富,降低識別難度和復(fù)雜度,從而提高車標(biāo)識別的準(zhǔn)確率。
車標(biāo)的定位是進(jìn)行車標(biāo)的識別的首要環(huán)節(jié),目前,針對車標(biāo)的定位,提出了眾多的方法。文獻(xiàn)[7~10]車標(biāo)粗定位在得到車頭中軸的基礎(chǔ)上,根據(jù)經(jīng)驗(yàn)矩形和車標(biāo)相對于車牌的位置關(guān)系確定出車標(biāo)經(jīng)驗(yàn)搜索矩形,然后利用特征信息精確定位。文獻(xiàn)[11,12]采用了一種先根據(jù)經(jīng)驗(yàn)矩形進(jìn)行車標(biāo)粗定位,再基于對粗定位車標(biāo)圖像的投影,提出了一系列新算法,通過計(jì)算圖像重心定位到車標(biāo)中心位置,再確定車標(biāo)的上下左右邊界,即研究基于車牌的定位和對稱的圖像特征進(jìn)行車標(biāo)的粗定位。由于車輛的車臉部分,車臉的柵格占了圖像的大部分信息,由此,本文提出了基于柵格信息的車標(biāo)定位,有很強(qiáng)的創(chuàng)新性和實(shí)用性。方法主要包括車臉定位,車臉定位圖像分割,車臉圖像投影分析,最終實(shí)現(xiàn)車臉柵格定位,為進(jìn)一步的車標(biāo)識別提供數(shù)據(jù)源。
1 Adaboost車臉定位
Adaboost本質(zhì)是一種迭代算法[13],能夠?qū)Ψ诸惤Y(jié)果集成進(jìn)行優(yōu)化,并降低其他因素對檢測結(jié)果的干擾[14]。其原理是對同一個訓(xùn)練集訓(xùn)練不同的弱分類器,然后,將這些弱分類器通過級聯(lián)獲得一個更強(qiáng)的最終分類器。Adaboost訓(xùn)練分類器的關(guān)鍵在于樣本,本文中的正樣本指待檢測的車臉樣本,負(fù)樣本指其它非車臉的任意圖片。所有的樣本圖像均被歸一化為統(tǒng)一尺寸,輸入的N個訓(xùn)練樣本為{x1,y1},{x2,y2},…,{xN,yN},其中xi為輸入的樣本訓(xùn)練,yi=0,1,分別為負(fù)樣本、正樣本。在訓(xùn)練樣本中,已知負(fù)樣本為m個,正樣本數(shù)n,那么第j個特征所生成弱分類器表示為
(1)
式中hj為弱分類器的值;而θj為閾值;pj為不等號方向,其值為±1;fj(x)為特征值。
通過對每一個弱分類器進(jìn)行訓(xùn)練,到分類錯誤率最小時調(diào)整權(quán)重系數(shù)。最后,將每一個優(yōu)化后的分類器級聯(lián)為一個性能特征較好的強(qiáng)分類器。最終的強(qiáng)分類器為
(2)

本文使用來自不同交通卡口的車輛圖片作為實(shí)驗(yàn)樣本,其中,正樣本5 000幅,負(fù)樣本為5 200幅。手動截取3 600幅圖片的車臉區(qū)域作為輸入的正樣本。通過Adaboost算法對樣本進(jìn)行訓(xùn)練,然后,將剩余的1 400幅車輛圖像作為測試集,利用該分類器進(jìn)行車臉區(qū)域的檢測。部分正樣本和車臉定位的結(jié)果如圖1和圖2所示。通過實(shí)驗(yàn)表明:正確定位到車臉區(qū)域的有1 312幅圖片,正確檢測率為93.71 %。由于在現(xiàn)實(shí)道路場景中環(huán)境較為復(fù)雜,加上不可避免的圖像質(zhì)量清晰度問題,車臉的定位準(zhǔn)確率還有待提高。
圖1 部分車臉正樣本
圖2 車臉定位矩形框
2 車臉投影梯度分析
為了能夠進(jìn)一步定位車標(biāo),對提取到的車臉圖像歸一化處理,利用車臉區(qū)域的紋理特征比較明顯的信息,采用垂直投影的方法對提取到的車臉區(qū)域進(jìn)行處理。經(jīng)過反復(fù)實(shí)驗(yàn)對比得出:利用垂直投影方法淺色車身的車臉區(qū)域受光照影響大,因此,將車臉圖像進(jìn)行二值化后再作垂直投影,避免光照亮度帶來的影響,并采用最大類間方差法得到灰度圖像的最佳分割閾值,對圖像進(jìn)行二值化處理。二值化垂直投影效果如圖3所示,對于二值化處理后的圖像做垂直投影的公式如式(3)所示
(3)
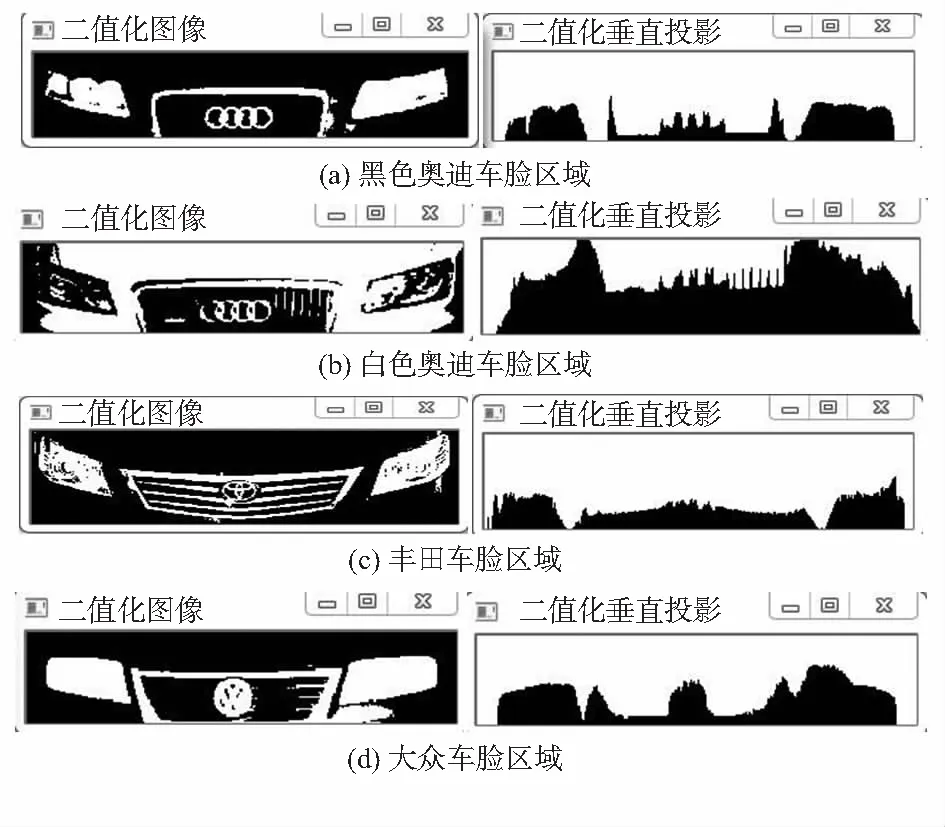
圖3 二值化垂直投影
對于車身較暗和較亮導(dǎo)致二值化垂直投影效果的差異,本文對車臉圖像進(jìn)行水平梯度垂直投影和垂直梯度垂直投影,投影效果如圖4所示。
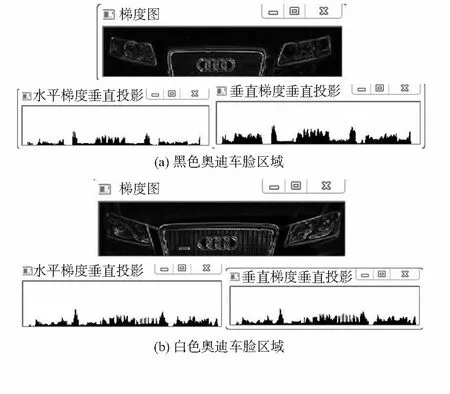
圖4 車臉區(qū)域梯度垂直投影
3 柵格定位分割及實(shí)驗(yàn)結(jié)果
從梯度垂直投影實(shí)驗(yàn)結(jié)果可以看出,水平梯度垂直投影和垂直梯度垂直投影均能有效地解決車身光照亮度問題。本文采用水平梯度和垂直梯度的垂直投影相結(jié)合的方法,依據(jù)設(shè)定的閾值將車臉散熱器格柵區(qū)域與車燈區(qū)域分割開來,將最終定位的區(qū)域范圍在原始車輛圖像上標(biāo)注出來,從而準(zhǔn)確地定位格柵,如圖5所示。
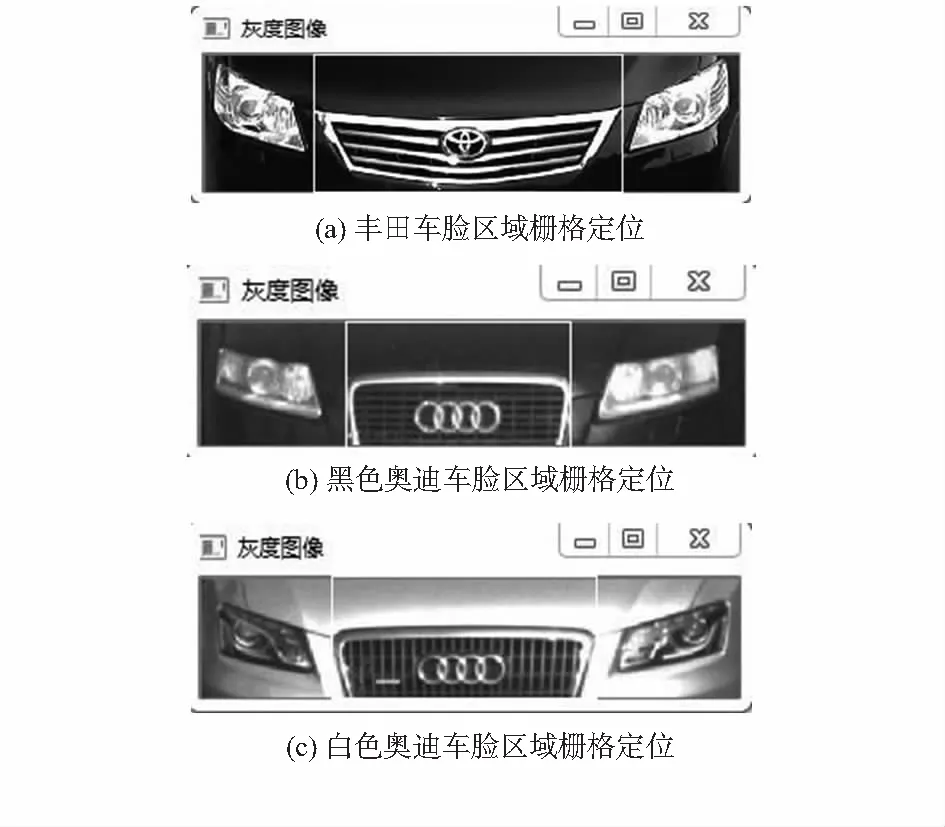
圖5 不同種車臉區(qū)域柵格定位
4 結(jié) 論
實(shí)驗(yàn)收集了多種車型的車輛樣本,在Visualstudio2010平臺編程實(shí)現(xiàn)車臉的定位,對定位好的車臉圖像利用Matlab編程環(huán)境下通過梯度水平和垂直投影分析,從而定位車輛柵格,為車標(biāo)的識別奠定了堅(jiān)實(shí)的基礎(chǔ)。實(shí)驗(yàn)結(jié)果證明:本文提出的基于Adaboost方法提取出的車臉圖像,能夠有效定位車輛柵格,柵格分割后進(jìn)一步進(jìn)行車標(biāo)分析,實(shí)現(xiàn)車型的準(zhǔn)確識別。在現(xiàn)實(shí)應(yīng)用中,相比其它的直接對車臉圖像分析進(jìn)行車標(biāo)識別的方法,本文方法更具有實(shí)用性和創(chuàng)新性。
[1]LiuYang,LiShutao.AvehicleLogolocationapproachbasedonedgedetectionandprojection[C]∥IEEEInternationalConferenceonVehicularElectronicsandSafety,2011:165-168.
[2] 李舜酩,沈 峘,毛建國,等.智能車輛發(fā)展及其關(guān)鍵技術(shù)研究現(xiàn)狀[J].傳感器與微系統(tǒng),2009,28(1):1-3.
[3] 宣森炎,龔小謹(jǐn),劉濟(jì)林.基于聯(lián)合卷積和遞歸神經(jīng)網(wǎng)絡(luò)的交通標(biāo)志識別[J].傳感器與微系統(tǒng),2014,33(8):30-33.
[4] 丁淑艷,華春梅,李倫波.一種新的退化交通標(biāo)志圖像的分類算法研究[J].傳感器與微系統(tǒng),2007,26(8):43-47.
[5] 李 俠,李文舉.基于模板匹配和邊緣檢測的車標(biāo)定位方法[J].計(jì)算機(jī)工程與設(shè)計(jì),2011,32(10):3453-3456.
[6] 魯 豐,劉 蕓,張仁輝.基于改進(jìn)HOG特征值的車標(biāo)檢測與識別方法[J].光通信研究,2012(5):26-29.
[7] 紅 玲,王云瓊.基于差分與對稱性檢測相結(jié)合的車標(biāo)定位方法[J].曲靖師范學(xué)院學(xué)報(bào),2008(6):68-71.
[8] 付 煒,趙正剛,王大江.基于水平灰度跳變和垂直投影的車牌定位方法[J].電子測量技術(shù),2008,31(3):61-65.
[9] 陳 陽,李定主.一種由粗到精的車標(biāo)定位算法[J].電腦開發(fā)與應(yīng)用,2007(2):22-26.
[10] 王云瓊,劉直芳.基于對稱性的實(shí)時車標(biāo)定位和識別方法[J].系統(tǒng)仿真學(xué)報(bào),2009,21(4):1095-1100.
[11] 樓漢琦,蔡曉東,李長俊.一種實(shí)現(xiàn)快速車標(biāo)定位的方法[J].國外電子測量技術(shù),2013,32(5):72-78.
[12] 劉玉松,陳 剛.基于邊緣投影的快速車標(biāo)定位方法[J].信息技術(shù),2015(11):102-104,108.
[13] 李全武,李 勃,潘 藝.車臉定位及識別方法研究[J].計(jì)算機(jī)科學(xué)與探索,2015(6):726-733.
[14] 嚴(yán) 農(nóng),嚴(yán) 實(shí),楊永斌,等.Adaboost集成BP神經(jīng)網(wǎng)絡(luò)在火電廠SO2濃度檢測中的應(yīng)用[J].傳感器與微系統(tǒng),2016,35(9):148-151.
Localization method of car face grid based on image features*
ZHANG You-fen1,2, LI Yu-hui1,2, PAN Yi1,2
(1.School of Information Engineering and Automation,Kunming University of Science and Technology, Kunming 650500,China; 2.Intelligent Image Processing Research Center of Intelligent Transportation System Engineering Technology Research Center of Yunnan Province,Kunming 650500,China)
In order to solve the bottleneck of vehicle recognition in intelligent transportation system,and find a way to accurately locate the vehicle logo,a new method is presented based on the Adaboost algorithm to locate the car face.After binaryzation image processing,projection of the horizontal gradient and vertical gradient of the binaryzation image is used to locate the grid,provide a new method for identification of the subsequent logo.Experimental results show that this method is of great significance both in theory and in practice.
Adaboost; logo recognition; logo positioning; grid positioning
10.13873/J.1000—9787(2017)09—0064—03
2016—09—22
國家自然科學(xué)基金資助項(xiàng)目(61363043)
TN 919
A
1000—9787(2017)09—0064—03
張有芬(1990-),女,碩士研究生,主要研究方向?yàn)橛?jì)算機(jī)圖像處理。
李玉惠,通訊作者,E-mail:1484946977@qq.com。
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫報(bào)(2021年2期)2021-05-25 02:07:46
中學(xué)生數(shù)理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫報(bào)(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
