合理權比對GPS/BDS偽距單點定位結果的影響分析
2017-09-11 13:40:55張廣漢余學祥嚴超盧禮張計凱
全球定位系統 2017年3期
關鍵詞:系統
張廣漢,余學祥,嚴超,盧禮,張計凱
(安徽理工大學 測繪學院,安徽 淮南 232001)
合理權比對GPS/BDS偽距單點定位結果的影響分析
張廣漢,余學祥,嚴超,盧禮,張計凱
(安徽理工大學 測繪學院,安徽 淮南 232001)
GPS/BDS組合定位綜合利用兩系統觀測值進行定位解算,但GPS系統與北斗系統間存在著系統差異,為了保證組合定位時兩系統間數據合理分配,需確定解算時兩系統觀測值間合理的權比。本文通過對幾組不同先驗權比時偽距單點定位結果比較選出的最佳權比與利用Helmert 方差分量估計方法求得的兩個系統偽距單定位權比進行分析,結果表明, GPS/BDS組合定位時的合理的先驗權比為1∶1,但在某些時間段內,其中一個系統的衛星數減少或數據質量不佳等情況時,這會導致該系統觀測值在組合定位中的貢獻率大大降低,此時就需要分段確定合理權比。
組合定位;Helmert 方差分量估計;先驗權比;分段權比
0 引 言
多系統組合可以明顯增加可視衛星數量,能夠改善衛星空間幾何結構,增加可利用數據量,從而提高系統定位的精度、增強系統的可靠性、改善系統整體運行效率。同時組合系統還可以相互取長補短,可以削弱單系統中存在的系統性誤差量,通過系統冗余信息來改善衛星分布,改善由于法方程的病態性導致的定位精度問題等[1-2]。
GPS/BDS組合系統中GPS與BDS系統間具有一定的差異性,如果GPS/BDS組合定位只是簡單的將兩系統的觀測數據糅合在一起從而使觀測信息量增加,這種簡單的融合并不一定能夠提高系統定位精度,有時反而會使數據處理時的計算量大大增加,降低組合系統的定位精度。因此組合定位系統在將兩系統融合時需要充分考慮系統兼容性問題,采用合適的數學模型和數據處理算法[3-4]。GPS/BDS組合偽距單點定位采用基于最小二乘算法的數學模型,利用該模型進行定位解算時需要列出觀測方程以及求得觀測值權陣。觀測值的權表示每個觀測值對整個解的貢獻大小,因此準確求得
GPS與BDS觀測值的權陣以及兩系統間的權比是一項關鍵內容,目前常用的兩種定權模型是高度角隨機模型和基于Helmert驗后方差估計模型。但由于Helmert方差分量估計采用逐次迭代算法,需要較長的時間完成迭代計算,難以滿足動態定位的需要。因此為了保證解的實時性,本文采用高度角定權模型確定GPS/BDS組合單點定位觀測值的權陣,而兩系統間的權比是給定兩系統觀測值先驗權比。為了求得GPS與BDS組合定位觀測值的合理先驗權比。本文通過對幾組不同先驗權比情況進行偽距單點定位計算選出最佳權比,并與采用Helmert方差分量估計方法計算的權比進行對比分析,以求得GPS與BDS組合定位時偽距單點定位的最佳先驗權比[4-5]。
1 數學模型
1.1 GPS/BDS組合偽距單點定位觀測方程
(1)
(2)
在上述GPS/BDS組合偽距單點觀測方程中,其中對流層延遲誤差和電離延遲層誤差可采用誤差模型進行削弱和改正或者通過觀測值的相關組合進行削弱和消除。其中對流層延遲誤差可采用Saastamoinen模型,Hopfield模型等模型進行改正,電離層誤差可通過Klobuchar等模型進行改正[6]。多路徑延遲誤差無法用模型進行有效的改正,只能通過選取良好的觀測環境減弱多路徑效應。衛星的空間坐標以及衛星鐘差都可以通過廣播星歷信息計算得到。
1.2 高度角定權隨機模型
高度角定權其實質就是以高度角為指標對具有不同高度角的觀測值進行方差估計,利用觀測歷元衛星高度角建立的隨機模型具有模型簡單、計算量小等優點。衛星發射的信號傳播過程中將穿過地球大氣層,由于不同高度的大氣密度,濕度,溫度等屬性都不相同,因此衛星信號會發生大氣延遲。由于衛星高度角不同時,衛星信號穿過大氣層時的折射角度和路徑也就不同,大氣延量遲也不同。大氣延時隨著衛星高度角的變大而逐漸減小,在天頂方向達到最小值。多路徑效應也受衛星高度角影響,多路徑效應隨衛星高度角變大逐漸減弱,在天頂方向最弱,這就是在數據采集與數據處理時需要根據實際情況設定合理截止高度角的原因。高度角定權方法實質就是簡單的正弦三角函數公式對不同高度角衛星的觀測值方差進行估計[7]。

(3)
后來學者們根據不斷的實驗研究對以上公式進行了改進,使其能夠更好地估計低高度角衛星的方差值

(4)
式中: E為對應的衛星高度角; a,b為常數,可根據經驗取值。
1.3 針對北斗混合星座不同衛星定權的改進方法
GPS系統不同衛星間高度差異較小,而北斗衛星不同類型衛星間高度差異較大,當衛星高度角相同時,衛星高度可能不一樣。對于北斗偽距單點定位時,不同星座衛星定權仍按照統一的高度角定權方法顯然不再準確。為了改進北斗系統不同星座衛星軌道高度差異較大對北斗系統定權和定位結果的影響,肖國銳等人在《北斗導航定位系統單點定位中的一種定權方法》一文中得到一種針對北斗混合星座不同衛星定權的改進方法[8-9],新的觀測值定權為
(5)

(6)
(7)
新的定權公式考慮了距離因素,其定權結果相比直接利用高度角定權的結果進一步優化,可以提高北斗單點定位精度,結果更為合理。定權公式(7)優勢主要體現在導航系統星座較為復雜,導航衛星軌道高度差異較大時,可以將距離因素考慮進定權公式中。
1.4 Helmert方差分量估計基本原理
組合系統中有兩類觀測量GPS觀測值L1與BDS觀測值L2,它們的權陣分別為P1和P2.假設兩類觀測值間是相互獨立的觀測量,則它們的組合權陣P12=0.根據間接平差理論原理,組合系統誤差方程為
(8)

(9)
(10)
2 實驗數據處理與分析
本文的數據處理內容主要分為兩大部分:第一部分為GPS/BDS組合系統偽距單點定位數據處理,目的是研究 GPS/BD2 系統標準單點定位時的偽距觀測值合理權比問題;第二部分是在第一部分的基礎上發現對所有觀測數據給定統一的先驗權比可能不太合理,可能會導致組合定位的精度和可靠性降低,因此在第一部分數據基礎上細化分析了不同情況下,數據權比的分配。
2.1 GPS/BDS組合系統合理先驗權比計算
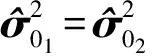
為了驗證本文提出的合理先驗權比對GPS/BDS偽距單點定位精度的影響,數據處理時采用控制變量法:在組合系統中保持其中某一系統觀測值所占權重為1,逐漸增大另一系統所占權的權比,根據不同權比情況下單點定位精度分析得出最優權比。利用自編程序在GPS∶BDS權比為6∶1、5∶1、4∶1、3∶1、2∶1、1∶1、1∶2、1∶3、1∶4、1∶5、1∶6 等不同的先驗權比進行GPS/BDS組合偽距單點定位。權比為1∶1時各歷元內計算的N、E、U方向偏差均值與點位誤差均值如圖1所示。由于篇幅問題,其它權比情況下圖就不一一列出,將其它權比的N、E、U方向偏差與點位誤差求均值由表1示出。分析表1數據可以看出,當給定的先驗權比發生變化時,單點定位的定位精度也有隨之變化。當GPS∶BDS權比由 6∶1 變為 1∶1時,點位誤差大小逐漸減小,在權比為 1∶1 時最小,當GPS:BDS權比由 1∶1 變為 1∶6時,點位誤差大小逐漸增大。
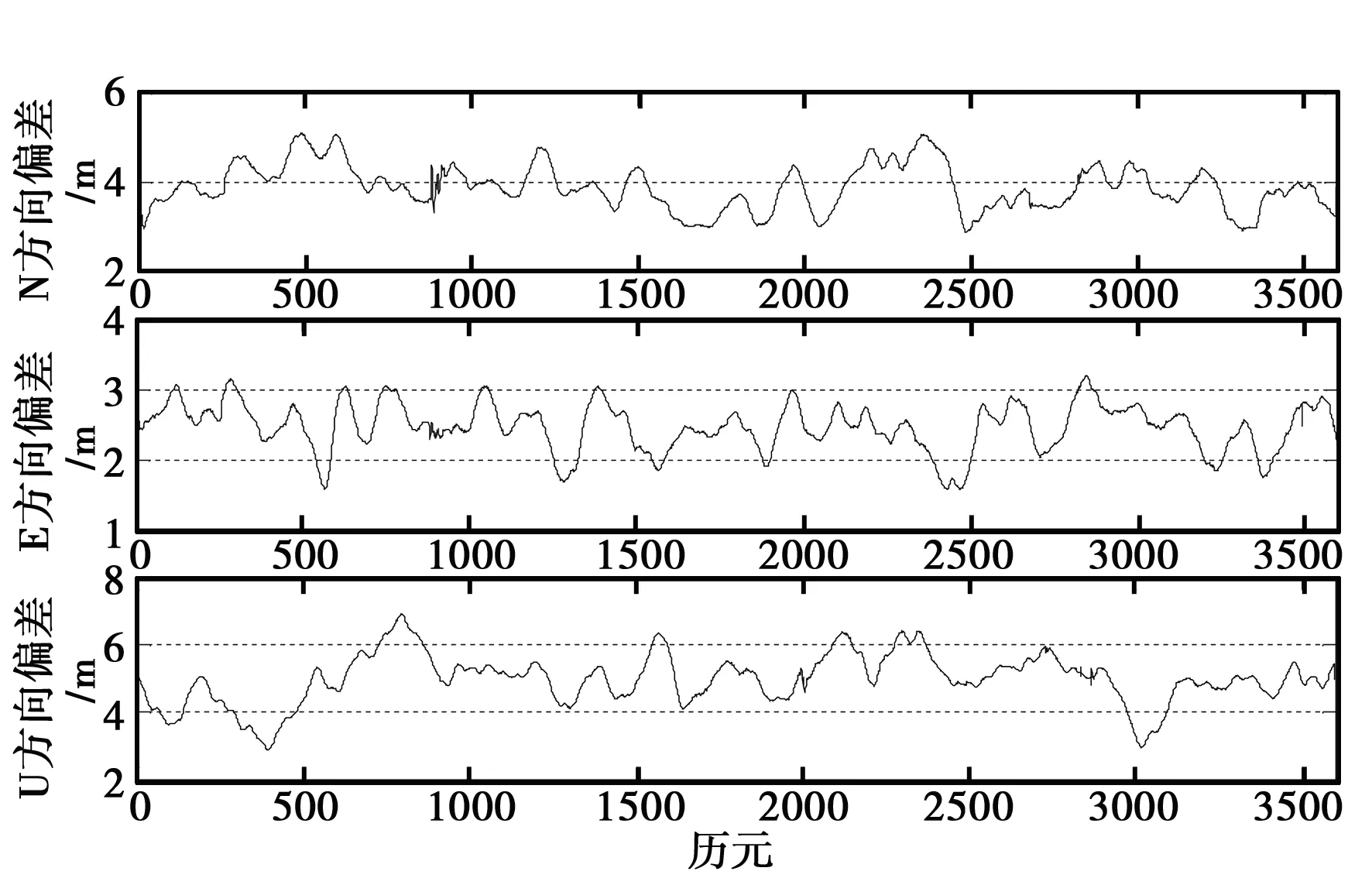
圖1 1∶1權比各歷元N、E、U方向偏差
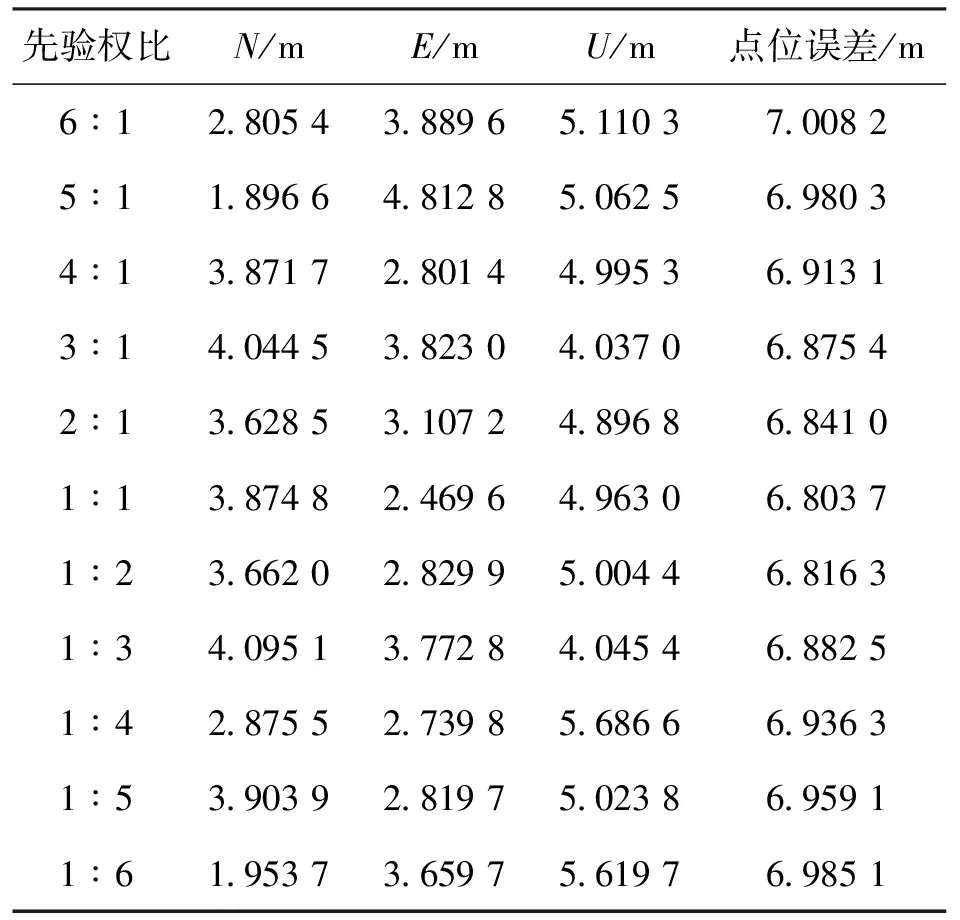
表1 不同GPS:BDS權比N、E、U方向偏差與點位誤差求均值
為驗證以上確定的先驗權比的正確性,可利用Helmert 方差分量估計求得兩系統偽距觀測值間的方差比,通過兩系統間的方差比得到權比。觀測值方差計算公式為
(11)
式中:i為GPS或者BDS系統;V為觀測值的殘差向量;P為觀測值權陣;n為觀測數據個數;r為必要的觀測數。
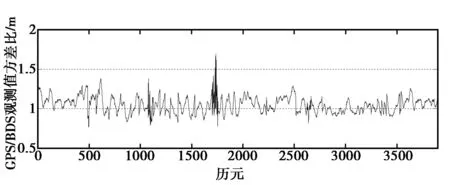
圖2 GPS與BDS觀測值方差比
由Helmert 方差分量估計求得兩系統偽距觀測值間的方差比如圖2所示,圖2示出了每個歷元進行偽距單點定位時 GPS 與BDS觀測值的驗后殘差方差比。由圖看出,在忽略個別歷元偏差較大的情況,總體表現為兩個系統偽距觀測值的驗后方差比約等于11,因此兩系統觀測值對應的權比也約為 1∶1.由Helmert 方差分量估計求得兩系統偽距觀測值間權比與給定的先驗權比是相同的,所以在給定先驗權比為1∶1時組合系統可以獲得最優的定位精度。
2.2 分段賦予組合系統中各類型觀測值不同權比定位結果
在完成第一部分數據處理后得到GPS/BDS組合系統最佳先驗權比為1∶1,同時利用Helmert 方差分量估計方法求得兩系統間的權比,總體上是相等的。但是在將GPS系統單點定位結果與GPS/BDS組合系統定位結果相比較的過程中發現一部分歷元GPS單系統定位結果反而比組合系統定位精度要高,這就表明在加入BDS系統數據后并沒有提高組合系統定位精度,反而是單點定位精度下降。此時組合系統中的BDS數據就變成了冗余信息,對定位結果沒有貢獻或者是貢獻很少,如果此時繼續給予組合系統中BDS數據50%的權重就顯得不太合理了。根據以上出現的問題提出分段給予合理先驗權比的想法。
BDS系統衛星空間分布強度不如GPS系統,一般在組合定位時GPS權重應較大[11-13]。圖3示出了單點定位時各歷元內各系統的可視衛星數,GPS衛星數、BDS衛星數、GPS/BDS組合系統衛星數。由圖3可知GPS可視衛星最多時為10顆,最小時為8顆,平均可視衛星約為9.1顆,BDS可視衛星最多時約為9顆,最小時約為6顆,平均可視衛星約為7.9顆。圖4為GPS單系統與GPS/BDS組合系統GDOP圖,由于GPS/BDS組合系統衛星數較 GPS單系統衛星數大大增加,可以看到GPS單系統的GDOP值比組合系統GDOP值大,組合系統的衛星空間分布強度大大提高[14-15]。
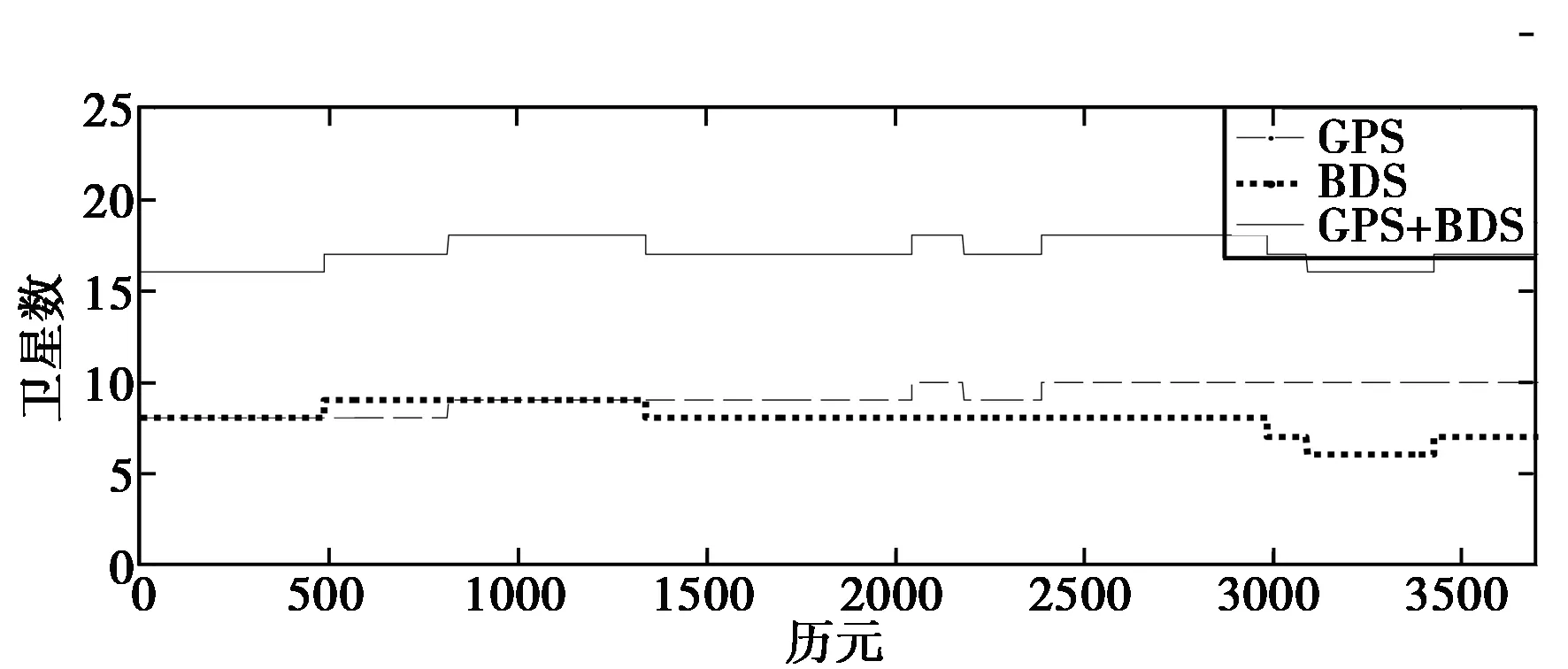
圖3 各歷元內不同系統可見衛星數
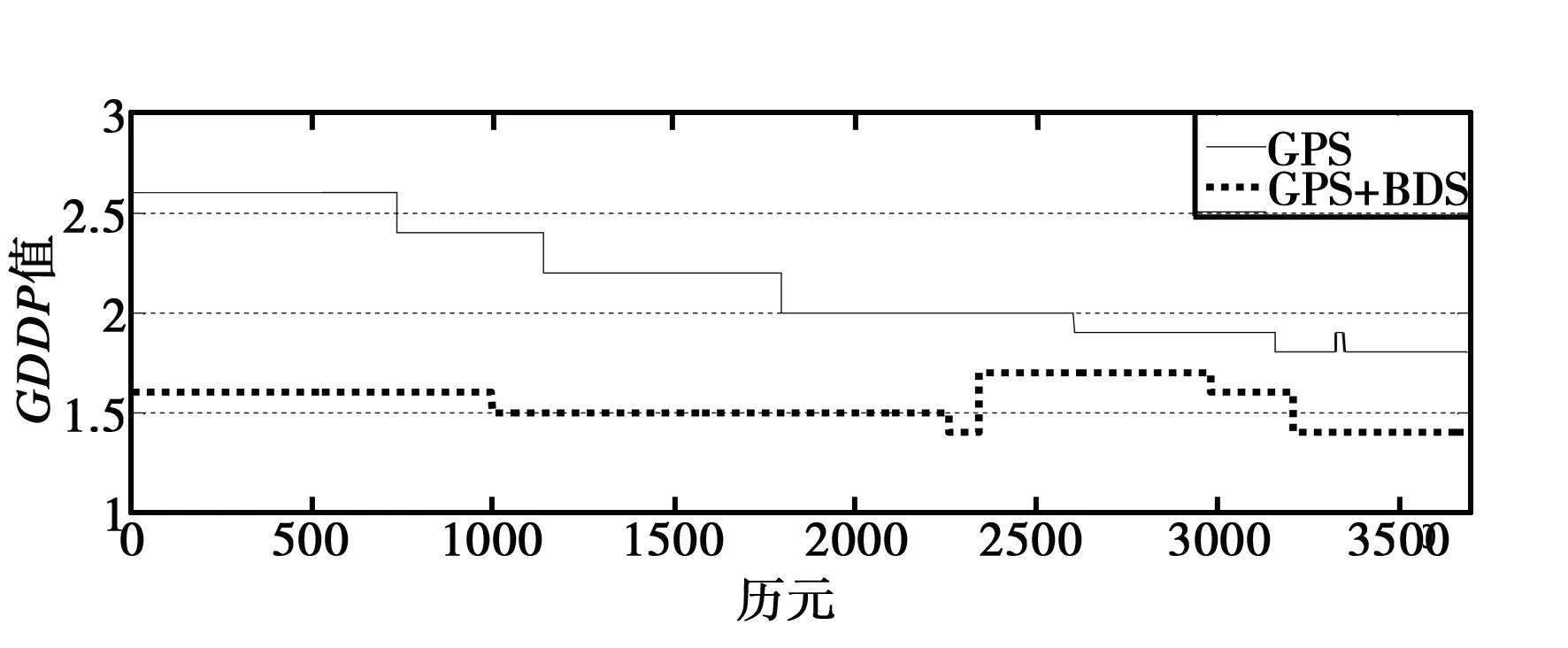
圖4 各歷元內GPS與GPS/BDS組合系統GDOP值
GPS單系統與1∶1權比下GPS/BDS組合系統偽距單點定位點位誤差如圖5所示。可以看出GPS點位誤差與組合系統點位誤差在部分歷元中存在較為明顯的差異,圖5 中可看出1~1 700歷元左右GPS點位誤差大于組合系統點位誤差、1 700~2 400歷元GPS與組合系統點位誤差相等、3 100~3 700歷元GPS 點位誤差小于組合系統點位誤差。根據這三種情況分析,第一種情況下GPS點位誤差大于組合系統點位誤差,這說明給予組合系統中BDS系統50%的權重可以有效的提高定位精度,所以此種情況下先驗權比為1∶1是合理的。后面兩種情況下,給予組合系統中BDS系統50%的權重并沒有提高定組合系統位精度,反而在部分歷元內定位精度降低了,這就說明后兩種情況下先驗權比為1∶1是不合適的。
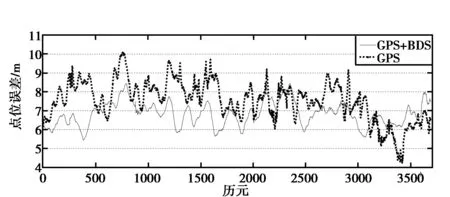
圖5 各歷元內GPS與GPS/BDS組合系統點位誤差對比
以下內容主要對后兩種情況下合理先驗權比的確定進行分析。此部分數據處理思路與第一部分相同,在各時段中選取具有代表性的GPS點位誤差大于組合系統點位誤差或GPS與組合系統點位誤差相等的時段分段分析。結果如表2、表3所示。表2是將點位誤差GPS/BDS>GPS的部分歷元單獨再次賦予不同先驗權比進行分析,由表2可看出隨著GPS∶BDS權比不斷減小,組合系統點位誤差大小大小逐漸變大。當GPS∶BDS權比達到1∶6后再繼續增大權比時,點位誤差大小基本就保持不變了。表3示出了將點位誤差GPS/BDS約等于GPS的部分歷元單獨再次賦予不同先驗權比進行分析,根據表3可以看出,隨著GPS∶BDS權比不斷減小,組合系統點位誤差大小大小逐漸減小,當權比為3∶1時達到最小值,權比大于3∶1后組合系統點位誤差開始逐漸變大。
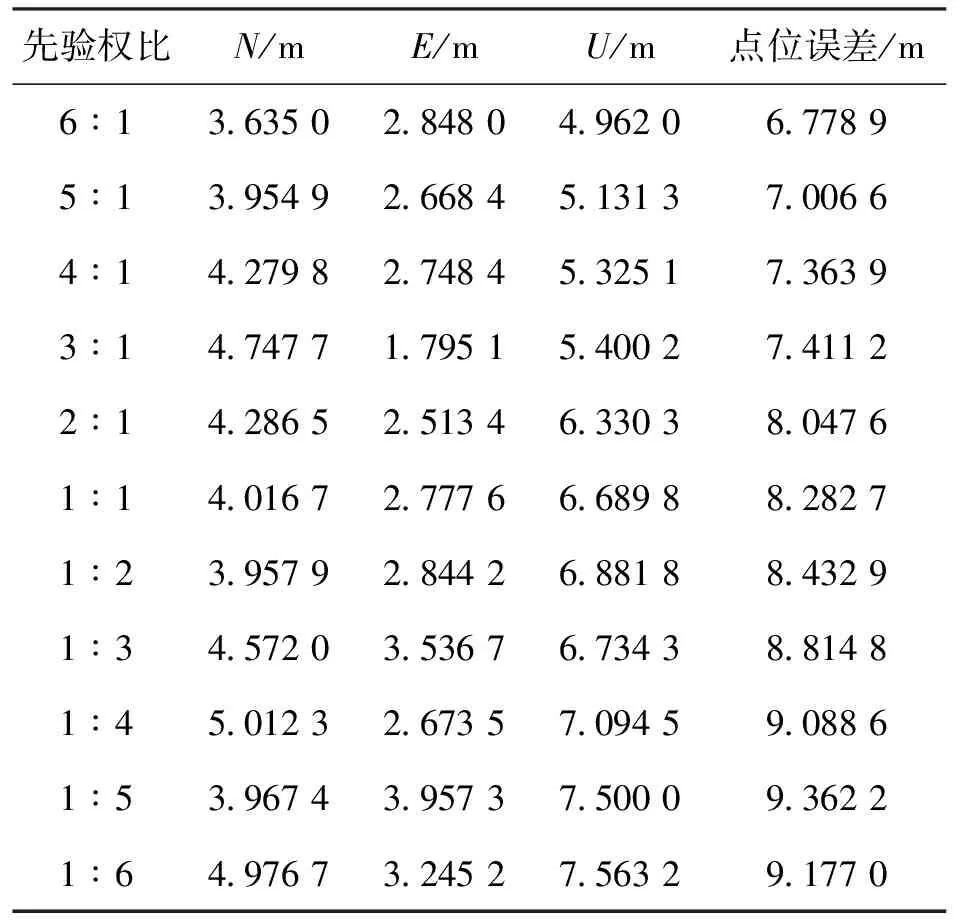
表2 點位誤差GPS/BDS>GPS時各歷元不同權比方向偏差與點位誤差均值
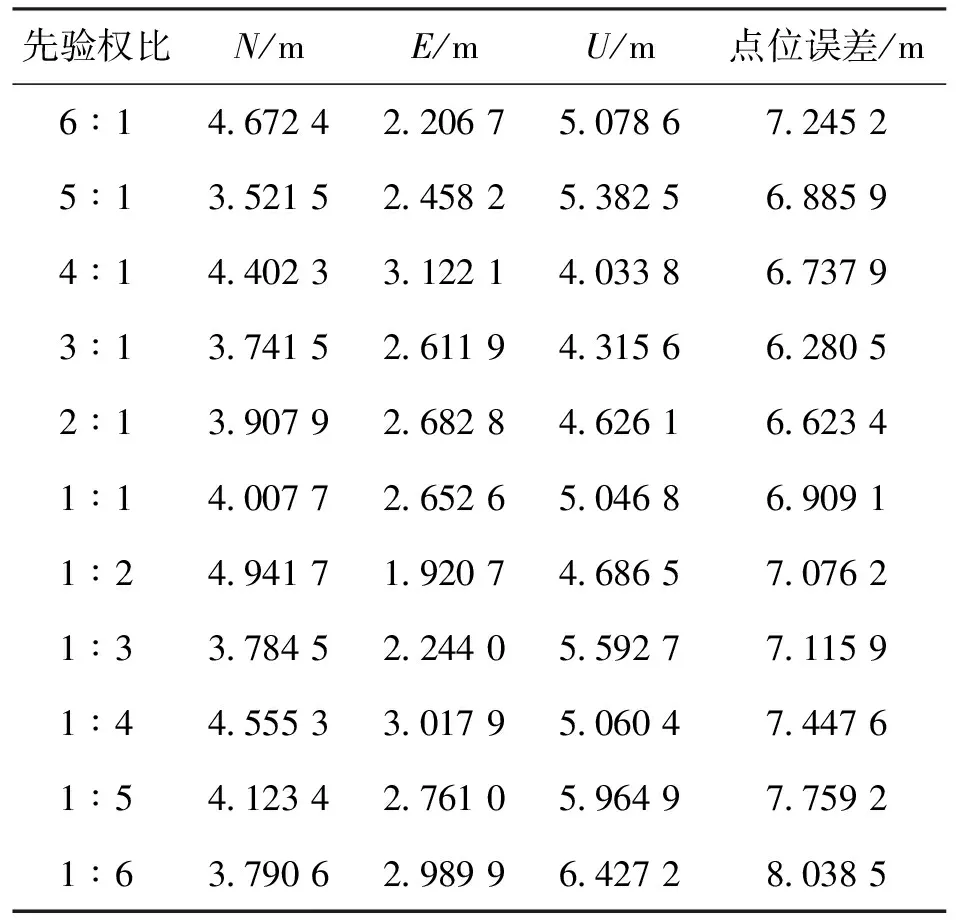
表3 點位誤差GPS/BDS等于GPS時各歷元不同權比方向偏差與點位誤差均值
3 結束語
本文通過對同一組觀測數據計算出GPS/BDS組合系統偽距單點定位在不同先驗權比下的點位誤差,由結果看出先驗權比為1∶1時點位誤差最小。為了驗證得出的最優權比為1∶1結果的正確性,利用 Helmert 方差分量估計方法計算得到GPS與BDS兩類觀測值的權比也為1∶1,最終得出:在GPS系統與BDS系統目前的空間組網狀態下,GPS/BDS 組合系統偽距單點定位偽距觀測值的先驗權比為1∶1較為合理。
在現實環境下進行組合導航定位時,由于環境復雜在有些時段觀測數據質量可能會受到影響。比如在動態試驗時某些時段觀測衛星受遮擋,導致某一系統的衛星數發生變化,此時該系統觀測值在組合導航中的貢獻率可能就會減小,如果在組合定位中繼續給予其較高的權重就不合理,可能會降低定位精度。此時就需要對數據分析賦予其合理的權比。
[1] 高曉,戴吾蛟.基于方差分量估計確定GPS/BD2組合定位先驗權比[J].大地測量與地球動力學,2013,32(2):136-138.
[2] 金彪,楊少文,劉萬科.GPS/BDS組合單點定位算法及結果分析[J].海洋測繪,2013,33(4):39-41.
[3] 鄒波,李曉莉,陶庭葉,等. GPS/BDS組合系統偽距單點定位模型精度分析[J].測繪科學,2014,39(10):30-32.
[4] 唐衛明,徐坤,金蕾,等.北斗/GPS組合偽距單點定位性能測試和分析[J].武漢大學學報(信息科學版,2015,40(4):529-533.
[5] 陸亞峰,樓立志,馬緒瀛,等.北斗與GPS組合偽距單點定位精度分析[J].全球定位系統,2013,38(6):1-6.
[6] 劉季,張小紅.GPS/BD組合導航定位試驗和精度分析[J].測繪信息與工程,2012,37(4):1-3.
[7] 張雙成,張鵬飛,范朋飛.GPS對流層改正模型的最新進展及對比分析[J].大地測 量與地球動力學,2012,32(2):91-95.
[8] 肖國銳,隋立芬,劉長建,等.北斗導航定位系統單點定位中的一種定權方法[J]. 測繪學報,2014,43(9):902-907.
[9] 王勝利,王慶,楊徉,等. 北斗 IGSO/GEO/MEO衛星聯合高精度定位方法[J].中國慣性技術學報,2013,21(6):793-796.
[10]田翌君,趙冬青,黃志勇,等.不同高度截止角下BDS/GPS定位分析[J].測繪科學技術學報,2015,32(4):363-367.
[11]段舉舉.沈云中.基于方差分量估計的GPS/GLONASS組合點定位[J]. 測繪通報,2011(4):4-6.
[12]高曉,戴吾蛟. GPS-GLONASS單頻偽距單點定位的權比分析[J].全球定位系統,2013,38(3):39-42.
[13]王福麗,王潛心,成英燕,等. GPS/GLONASS衛星導航系統組合定位的定權方法研究[J].測繪科學,2013,38(1)18-19.
[14]潘林,蔡昌盛,戴吾蛟,等.一種顧及衛星幾何分布的GPS/北斗組合定位定權方法[J].測繪工程,2014,23(12):25-30.
[15]劉偉洲,伍吉倉.GPS/北斗組合導航系統衛星可見性和GDOP值分析[C]//中國衛星導航學術年會,2012.
張廣漢 (1991-),男,碩士研究生,主要從事礦山開采變形監測與GNSS導航定位研究。
余學祥 (1965-),男,教授,工學博士,博士后,博士生導師,主要從事衛星導航定位技術及其應用方面的教學和科研工作。
嚴超 (1993-),男,碩士研究生,主要研究方向為GNSS數據處理與變形監測。
盧禮 (1992-),男,碩士研究生,主要從事GNSS導航與數據處理方向研究。
張計凱 (1991-),男,碩士研究生,主要從事開采沉陷與數據處理方向研究。
Analysis of Influence of Reasonable Weight Ratio on Single Point Positioning of GPS/BDS Pseudorange
ZHANG Guanghan,YU Xuexiang,YAN Chao,LU Li,ZHANG Jikai
(SchoolofGeomatics,AnhuiUniversityofScienceandTechnology,Huainan232001,China)
GPS/BDS combination positioning is a combination of two systems observations for positioning solution, but the GPS system and the Beidou system there is a systematic difference. In order to ensure the reasonable allocation of data between the two systems, it is necessary to determine a reasonable weight ratio between the observed values of the two systems. The optimal weight ratio is obtained by using the pseudo-range single-point localization of several different a priori weights ratio and the single-position weight ratio of the two systems obtained by using the Helmert variance component estimation method. The results show that the ratio of GPS/BDS combination is 1∶1. However, when the number of satellites in one system decreases or the data quality is poor, the contribution rate of the system observations in the combined localization is greatly reduced. In this case, it is necessary to determine the reasonable ratio
Combined positioning; Helmert variance component estimation; a priori ratio; segmentation weight ratio
10.13442/j.gnss.1008-9268.2017.03.010
2016-12-26
國家自然科學基金(批準號:41474026)
P228.4
A
1008-9268(2017)03-0048-06
聯系人: 張廣漢E-mail: 563420664@qq.com
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
