一類不確定非線性系統(tǒng)自適應(yīng)量化控制器設(shè)計(jì)
2017-09-09 16:19:29陳俞強(qiáng)
數(shù)字技術(shù)與應(yīng)用 2017年7期
陳俞強(qiáng)
摘要:針對(duì)帶有執(zhí)行器間隙的不確定非線性系統(tǒng),設(shè)計(jì)出了一種自適應(yīng)量化控制算法。基于著名的磁滯量化器扇形有界性質(zhì)和間隙的一個(gè)逆模型,真實(shí)的控制信號(hào)成功地從耦合的動(dòng)態(tài)中分離出來。所設(shè)計(jì)的控制器保證閉合系統(tǒng)中全部信號(hào)的有界性,及跟蹤誤差收斂到零附近的一個(gè)可調(diào)節(jié)的區(qū)域。仿真結(jié)果驗(yàn)證了該控制算法的有效性。
關(guān)鍵詞:非線性系統(tǒng);執(zhí)行器間隙;自適應(yīng)控制;神經(jīng)網(wǎng)絡(luò)
中圖分類號(hào):TP13 文獻(xiàn)標(biāo)識(shí)碼:A 文章編號(hào):1007-9416(2017)07-0162-04
1 引言
近年來,非線性系統(tǒng)的自適應(yīng)控制是控制理論研究領(lǐng)域的熱點(diǎn)問題,許多學(xué)者利用間隙的不確定非線性系統(tǒng)解決了許多控制器設(shè)計(jì)問題。目前,工業(yè)控制系統(tǒng)所接收到的控制信號(hào)通常由控制平臺(tái)通過網(wǎng)絡(luò)總線傳送過去,復(fù)雜情況下,控制命令還可能需要利用無線頻道傳輸。在實(shí)際環(huán)境中,網(wǎng)絡(luò)總線和無線頻道的帶寬通常是有限的,因此,過去所設(shè)計(jì)的連續(xù)時(shí)間非線性控制器很可能無法通過網(wǎng)絡(luò)總線被實(shí)時(shí)傳送,這意味著當(dāng)把這些連續(xù)時(shí)間控制方案應(yīng)用到網(wǎng)絡(luò)總線非線性系統(tǒng)時(shí),閉環(huán)穩(wěn)定性可能無法被有效地保證,即系統(tǒng)輸出跟蹤誤差可能會(huì)發(fā)散或系統(tǒng)狀態(tài)變量可能趨于無界。為了解決這個(gè)問題,提出基于量化設(shè)計(jì)的自適應(yīng)控制策略。在文獻(xiàn)[1-3],通過結(jié)合對(duì)數(shù)型量化器,K.Okano等學(xué)者提出了一種用于線性系統(tǒng)的自適應(yīng)量化控制算法。在文獻(xiàn)[4-6],該算法被推廣至非線性系統(tǒng)中,且磁滯量化器替換了原來的對(duì)數(shù)型量化器以避免間隔過大的量化等級(jí)導(dǎo)致的控制信號(hào)震顫問題,但采用這兩種自適應(yīng)量化控制方案所建立的閉環(huán)系統(tǒng)穩(wěn)定性依賴關(guān)于控制輸入的一個(gè)局限條件,且該條件是否滿足通常難以在控制器設(shè)計(jì)前被預(yù)先檢驗(yàn)的,這是因?yàn)閷?shí)時(shí)的控制信號(hào)是控制器被投入運(yùn)行后而產(chǎn)生的。為了去掉這個(gè)局限條件,Zhou[7]等學(xué)者提出了一種新的Backstepping設(shè)計(jì)方案,但該方案所針對(duì)的非線性系統(tǒng)類型又相對(duì)局限,比如,該方案要求嚴(yán)格反饋非線性系統(tǒng)中的可參數(shù)化不確定函數(shù)僅僅存在于最后一個(gè)子系統(tǒng)中,而且還要求除了最后一個(gè)子系統(tǒng)外,其他全部子系統(tǒng)非線性函數(shù)和它們的偏導(dǎo)數(shù)都滿足全局Lipschitz條件。顯然,如何去除這些條件,是一個(gè)具有理論和實(shí)際雙重價(jià)值的研究工作,但鑒于其難度,目前關(guān)于這方面的研究成果還相當(dāng)有限。
基于以上分析,我們將研究帶有執(zhí)行器間隙的不確定非線性系統(tǒng)自適應(yīng)量化控制設(shè)計(jì)。首先讓控制信號(hào)通過一個(gè)磁滯型量化器,以降低其在網(wǎng)絡(luò)總線中傳輸?shù)耐ㄐ怕省A炕鞯囊胧棺赃m應(yīng)控制設(shè)計(jì)變得十分困難,為了解決這個(gè)問題又不依賴于上述提及的文獻(xiàn)中的局限條件,量化器的一種基于扇形有界性質(zhì)的非線性分解方法被提出。再者,我們進(jìn)一步給出了分解間隙的方法。基于這些分解,真實(shí)控制器成功地從間隙約束和量化函數(shù)中被分離出來。最后,結(jié)合魯棒自適應(yīng)技術(shù)方法,從而完成量化控制算法的設(shè)計(jì)[8-10]。
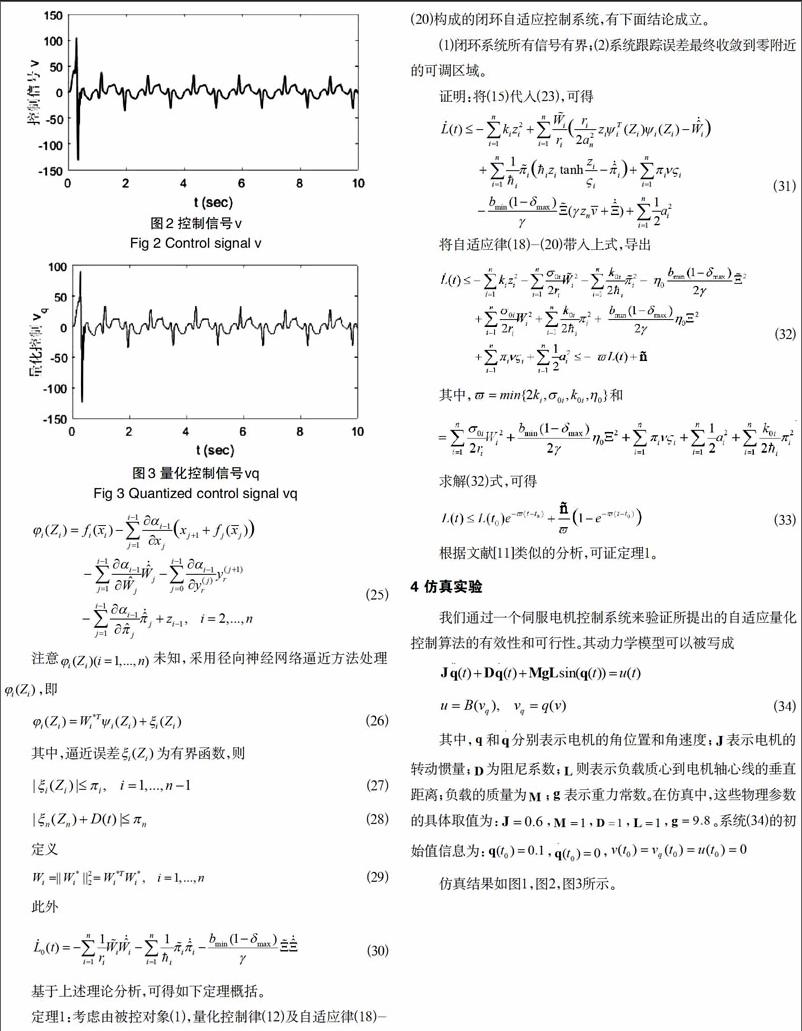
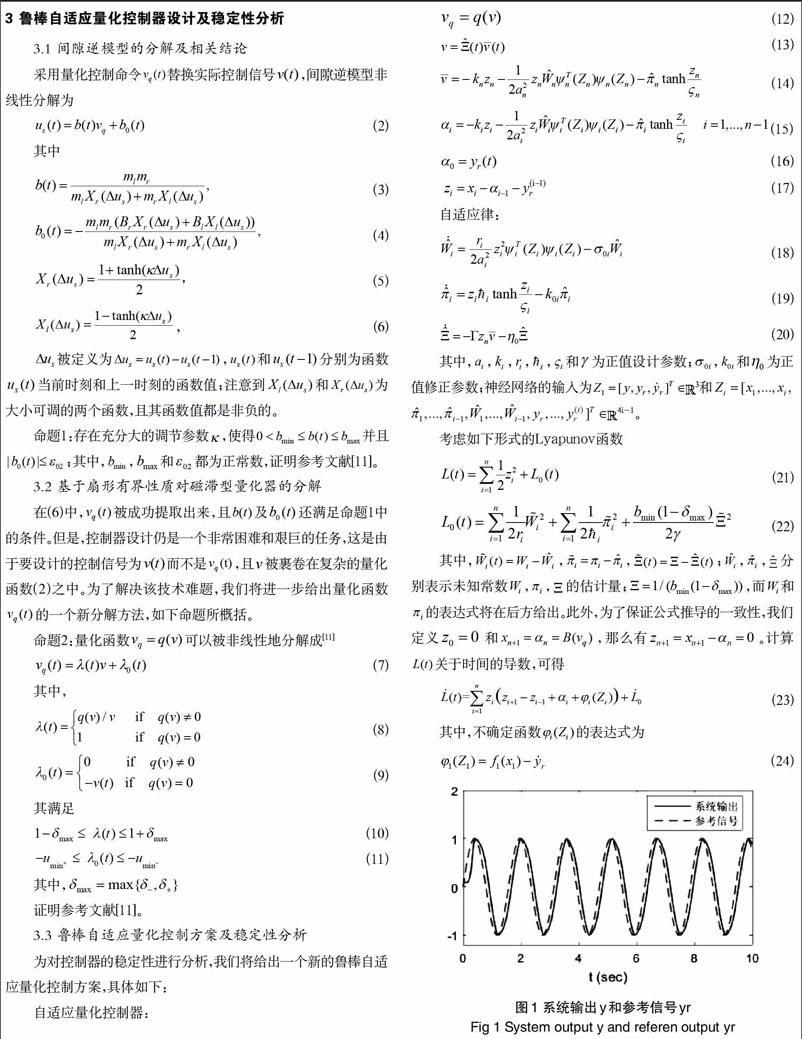
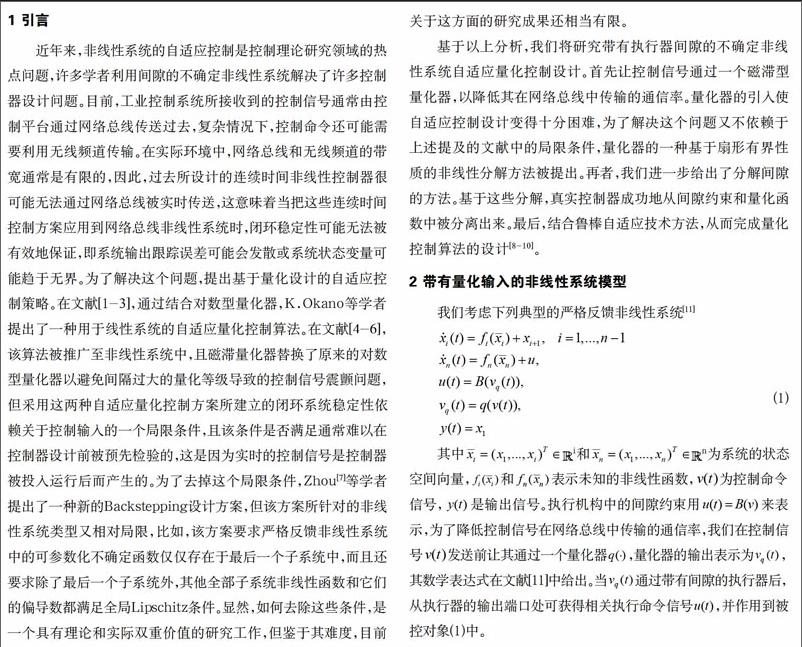
仿真結(jié)果如圖1,圖2,圖3所示。
5 結(jié)語
針對(duì)帶有執(zhí)行器間隙的嚴(yán)格反饋非線性系統(tǒng),文中提出了一種魯棒自自適應(yīng)量化控制方案。具體設(shè)計(jì)兩步分解方法:首先,對(duì)間隙模型進(jìn)行分解以提取出量化控制信號(hào);然后,再接著對(duì)提取的量化函數(shù)進(jìn)行分解,成功將控制信號(hào)分離了出來。接下來控制設(shè)計(jì)所面臨的難度是分解后得到的控制增益是一個(gè)未知的動(dòng)態(tài)函數(shù)。為了解決這個(gè)問題,我們進(jìn)一步提出了魯棒自適應(yīng)方法設(shè)計(jì)期望的量化控制器。通過嚴(yán)格的數(shù)學(xué)證明,所提出的解決方案不僅保證閉合系統(tǒng)全部信號(hào)的有界性,還使得輸出跟蹤誤差收斂到零附近的一個(gè)大小可調(diào)區(qū)間。
參考文獻(xiàn)
[1]K. Okano and H. Ishii, “Stabilization of uncertain systems with finite data rates and Markovian packet losses,” IEEE Trans. Control Netw.Syst., vol. 1, no. 4, pp. 298-307, Dec. 2014.
[2]X. Yang, C. C. Hua, J. Yang, and X. P. Guan, “New stability criteria for networked teleoperation system,” Information Sciences, vol. 233, no. 1,pp. 244–254, Jun. 2013.
[3]P. Yi and Y. G. Hong, ”Quantized subgradient algorithm and data-rate analysis for distributed optimization,” IEEE Trans. Control Netw. Syst., vol. 1, no. 4, pp. 380-392, Dec. 2014.
[4]T. P. Zhang and S. S. Ge, “Adaptive neural control of MIMO nonlinear state time-varying delay systems with unknown dead-zones and gain signs,” Automatica, vol. 43, no. 6, pp. 1021-1033, Jun. 2007.
[5]M. Chen, S. S. Ge, and V. Bernard, “Robust adaptive neural network control for a class of uncertain MIMO nonlinear systems with input nonlinearities,” IEEE Trans. Neural Netw., vol. 21, no. 5. pp. 796-812, May. 2010.endprint
[6]M. Chen, S. S. Ge, and B. B. Ren, “Adaptive tracking control of uncertain MIMO nonlinear systems with input constraints,” Automatica, vol. 47, no. 3, pp. 452-465, Mar. 2011.
[7]J. Zhou, C. Y.Wen, and G. H. Yang, “Adaptive backstepping stabilization of nonlinear uncertain systems with quantized input signal,” IEEE Trans. Autom. Control, vol. 59, no. 2, pp. 460-464, Feb. 2014.
[8]Y. J. Liu, Y. Gao, S. C. Tong and Y. M. Li, “Fuzzy approximation-based adaptive backstepping optimal control for a class of nonlinear discrete-time systems with dead-zone,”, IEEE Trans. Fuzzy Syst., DOI: 10.1109/TFUZZ.2015.2418000, 2015.
[9]C. Y. Wen and J. Zhou, “Decentralized adaptive stabilization in the presence of unknown Backlash -like hysteresis,” Automatica, vol. 43, no. 3, pp. 426-440, Mar. 2007.
[10]G. Tao and P. V. Kokotovic, “Adaptive control of systems with Backlash,” Automatica, vol. 29, no. 2, pp. 323-335, Mar. 1993.
[11]G. Lai, Z. Liu, Y. Zhang, etc, “Asymmetric actuator backlash compensation in quantized adaptive control of uncertain networked nonlinear systems,” IEEE Trans. Neural Netw., vol. 28, no. 2, pp. 294-307, Feb. 2017.endprint
 數(shù)字技術(shù)與應(yīng)用2017年7期
數(shù)字技術(shù)與應(yīng)用2017年7期
- 數(shù)字技術(shù)與應(yīng)用的其它文章
- OFDM技術(shù)在4G移動(dòng)通信系統(tǒng)中的應(yīng)用
- 正交頻分復(fù)用技術(shù)及其在4G移動(dòng)通信中的應(yīng)用
- 4G無線網(wǎng)絡(luò)規(guī)劃新技術(shù)應(yīng)用前景分析
- 有線電視寬帶接入網(wǎng)中EPON+EoC技術(shù)的應(yīng)用
- 光伏發(fā)電智能監(jiān)控系統(tǒng)的設(shè)計(jì)與實(shí)現(xiàn)
- 一種利用S7—1200集成以太網(wǎng)接口實(shí)現(xiàn)與S7—200 SMART通信的方法