海上試驗系統定位點跡外推算法設計
2017-09-09 11:08:40李旭
數字技術與應用 2017年7期
李旭
摘要:針對海上試驗平臺位置點跡丟失問題,介紹了一種基于α-β-γ濾波的外推方法,使用導航信號跟蹤失鎖前序點跡對無效定位時刻坐標進行預測,計算復雜度低,并使用實際采集點跡對算法進行了仿真分析。仿真結果表明,除勻變速運動外,該方法對于緩變加速平臺運動同樣具有較好的外推結果,具有較高的工程實用價值。
關鍵詞:運動建模;α-β-γ濾波;失鎖;點跡外推
中圖分類號:TN957.52 文獻標識碼:A 文章編號:1007-9416(2017)07-0144-02
海上試驗船或聲源船等平臺需要使用衛星定位設備進行實時位置記錄,輔助進行定位定向精度分析與評估。船載電臺等產生的同頻電磁干擾會導致衛星定位設備定位無效,造成點跡定位無效,影響試驗效果。本文采用α-β-γ點跡外推解決該問題,平臺位移變化近似為勻加速運動模型,可通過前序點跡對模型參數進行預測和估計。
1 平臺運動模型
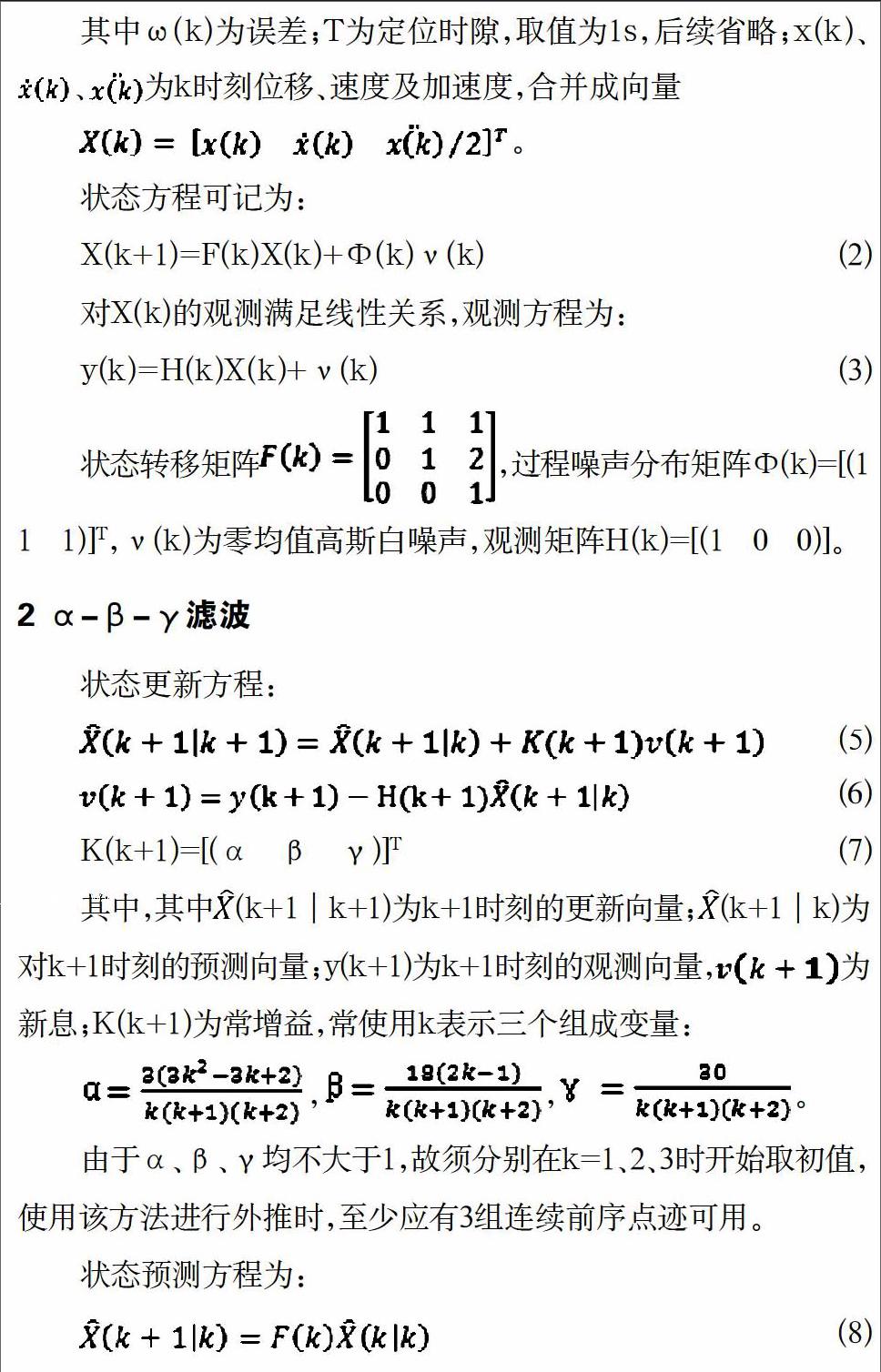
將位置信息轉換為空間直角坐標(x,y,z),在三個軸向分別進行相同的運動建模,以下以坐標x為例。根據CA模型,狀態變量僅考慮位移、速度和加速度,高階導數部分作為誤差,位移狀態方程為:
3 算法流程
算法流程如圖1所示。由于試驗平臺移動速度較慢,且海上無遮擋,定位無效點占比例較小,所以選用的前序點跡FIFO長度較長,取值為10。
4 仿真與分析
選用2016年南海試驗實測數據進行仿真,該航次全程無定位無效點,航程5小時,緩變加速運動,最大航速20節,適合算法仿真驗證。以45秒為周期,前10秒數據推入點跡FIFO,對后續35秒進行外推,將結果與實際結果進行誤差比對,如圖2。
全程外推最大誤差為7.02m,方差0.61m。經分析,外推誤差較大點均因外推開始后航行狀態變化產生,在航行平穩時段,外推精度誤差2m以內,滿足一般海上試驗平臺對位置精度的要求。
5 結語
該方法對于試驗船類海上試驗平臺的點跡外推具有較高的工程實用價值,在航行平穩時段精度高,非平穩時段同樣有較好的適應效果,應用時需根據平臺的實際工作情況選用參數,以達到最佳的外推精度。
參考文獻
[1]何友.雷達數據處理及應用[M].第2版.北京:電子工業出版社,2009,(8)83-89.
[2]黃鶴,張會生.一種改進的α-β-γ濾波跟蹤算法[J].西北工業大學學報,2008,(2):146-151.
[3]陳亮,吳小俊.基于常增益組合濾波器的目標跟蹤算法[J].計算機應用與軟件,2009,(7):16-17.endprint
