電動缸驅(qū)動的風(fēng)電機組葉片疲勞加載系統(tǒng)動力學(xué)分析
2017-09-07 06:48:25劉衛(wèi)生
風(fēng)能 2017年5期
文|劉衛(wèi)生
電動缸驅(qū)動的風(fēng)電機組葉片疲勞加載系統(tǒng)動力學(xué)分析
文|劉衛(wèi)生
風(fēng)電機組葉片疲勞加載試驗中的激振動力來源,是由驅(qū)動部件驅(qū)動的振動質(zhì)量塊對葉片施加的慣性力(也可認為是質(zhì)量塊對葉片夾具的反作用力)。驅(qū)動部件控制質(zhì)量塊做正弦規(guī)律的簡諧振動,在葉片上產(chǎn)生驅(qū)動其振動的、按照正弦規(guī)律變化的激振力。電動缸驅(qū)動的風(fēng)電機組葉片疲勞加載系統(tǒng),把伺服電機的旋轉(zhuǎn)運動轉(zhuǎn)換成直線運動,將伺服電機最佳優(yōu)點——精確的轉(zhuǎn)速、轉(zhuǎn)數(shù)、扭矩控制轉(zhuǎn)變成精確的速度、位置和推力控制,由電動缸驅(qū)動質(zhì)量塊作直線往復(fù)運動而產(chǎn)生反作用力,使葉片能夠沿揮舞方向或擺振方向振動。與通常所用的旋轉(zhuǎn)偏心輪加載方式相比,能實現(xiàn)葉片面向和弦向兩軸加載,提高加載效率,縮短實驗周期;且設(shè)備自重輕,有效加載載荷大。動力學(xué)分析是電動缸驅(qū)動的風(fēng)電機組葉片疲勞加載系統(tǒng)設(shè)計的基礎(chǔ),根據(jù)葉片、試驗及加載設(shè)備等基本條件,計算不同疲勞加載試驗所需的質(zhì)量塊質(zhì)量及產(chǎn)生的有效負載力幅值,最終完成電動缸的選型設(shè)計。
系統(tǒng)動力學(xué)分析
一、質(zhì)量塊相對于葉片加載點振動分析
取葉片為參考系,質(zhì)量塊振幅大小為S、質(zhì)量為m,葉片振動固有頻率為f,初始位置選為質(zhì)量塊處于導(dǎo)軌最下方時,則相對于葉片,質(zhì)量塊的位移s相對于時間t的方程為:

其中ω=2πf。
質(zhì)量塊運動過程中,相對于葉片加載點最大速度:

對于葉片振動系統(tǒng),有效的負載力為:

二、葉片振動分析
葉片加載點在豎直方向作正弦運動,由于加載時質(zhì)量塊與葉片達到共振,則取葉片豎直位移為0時為葉片的初始位置,葉片的振幅為A,葉片的運動方程為:

質(zhì)量塊及葉片加載點運動情況總結(jié)如表1所示。
三、質(zhì)量塊相對于地面運動分析
由于質(zhì)量塊除相對于葉片加載點做正弦運動外,還隨葉片上下擺動,故質(zhì)量塊相對于地面的位移方程應(yīng)為質(zhì)量塊相對于葉片加載點、葉片加載點相對于地面位移方程的矢量和,即質(zhì)量塊相對于地面絕對坐標:

圖 1振動穩(wěn)態(tài)運動狀態(tài)示意圖為穩(wěn)態(tài)運行下振動質(zhì)量塊、葉片運動狀態(tài)示意圖。
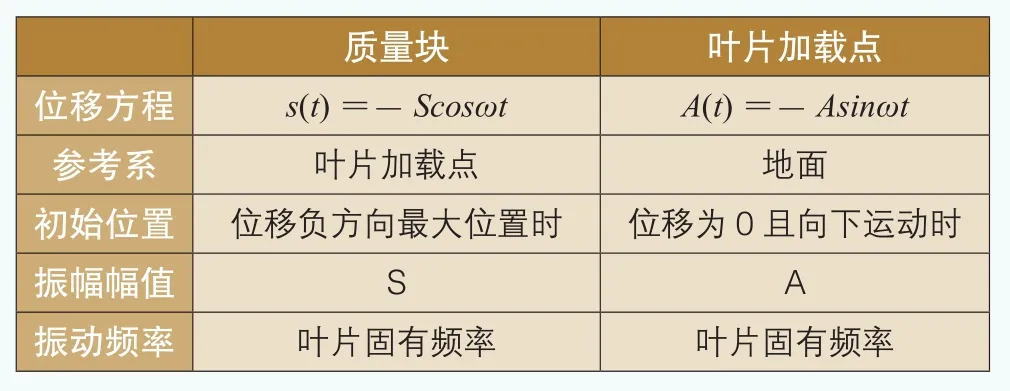
表1 質(zhì)量塊及葉片加載點運動情況總結(jié)
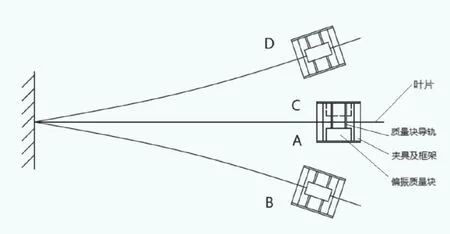
圖1 振動穩(wěn)態(tài)運動狀態(tài)示意圖
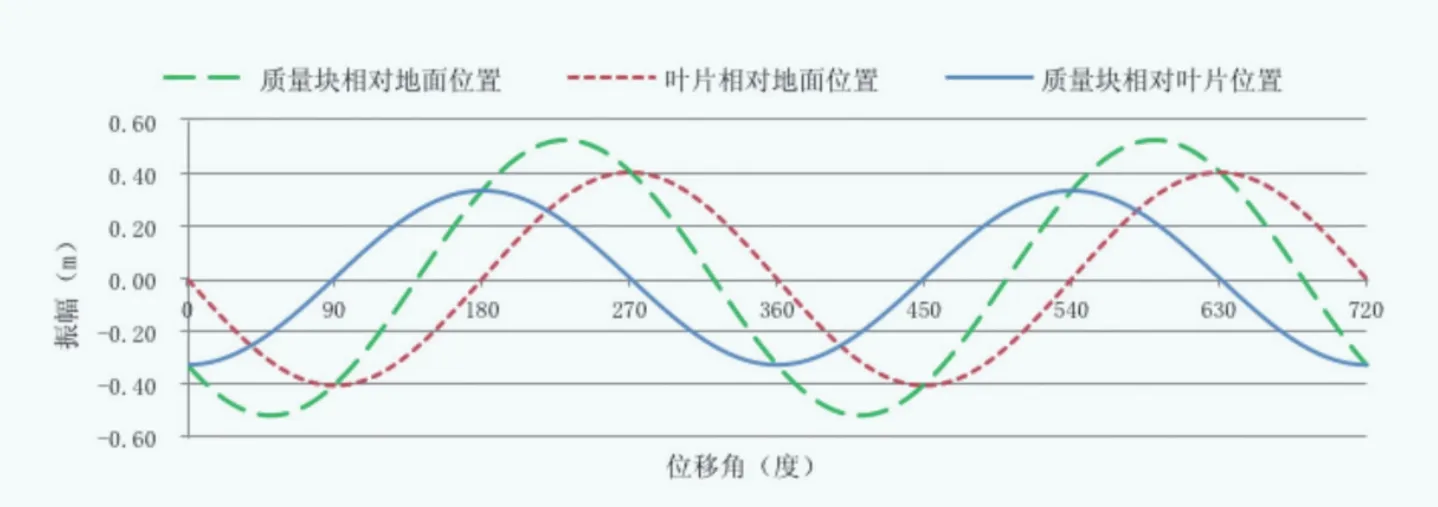
圖2 質(zhì)量塊實際運動位置曲線
初始狀態(tài)為A,一個周期的循環(huán)為A-B-C-D,虛線所繪為C狀態(tài)下質(zhì)量塊位置。葉片加載點相對地面位置、質(zhì)量塊相對葉片位置及質(zhì)量塊相對地面位置在兩個周期內(nèi)的振動位移曲線如圖2所示(取A=0.4m,S=0.35m)。
將此位移方程對時間求導(dǎo),得到質(zhì)量塊對于地面的速度方程:

速度方程繼續(xù)對時間求導(dǎo),得到質(zhì)量塊對于地面的加速度方程:

則驅(qū)動質(zhì)量塊運動所需合力為:

四、系統(tǒng)能量分析
激振力在一個工作周期內(nèi)做的功為:

共振時?=-π/2,即加載系統(tǒng)對葉片做功最大,為:

在加載點,葉片阻尼系數(shù)為c,等效剛度為k,振幅為A,則在一個振動周期的阻尼能耗ΔW為:

其中c=2kξ/ω為等效阻尼比。
根據(jù)能量守恒定律,質(zhì)量塊對葉片做功與阻尼耗能相等,即ΔE=ΔW,得:

由式(10)可得質(zhì)量塊等效質(zhì)量:

有效負載力F幅值:


電動缸選型設(shè)計計算
葉片揮舞方向疲勞試驗因與擺振方向相比,需要更大的葉片振幅(葉片加載點振動幅值)和更大的激振力,但激振頻率較低,在電動缸設(shè)計時一般只要電動缸的行程、最大負載力滿足揮舞方向的激振要求,激振頻率滿足擺振方向激振要求,所選擇的電動缸就可以同時滿足葉片揮舞方向和擺振方向疲勞加載的激振要求。電動缸驅(qū)動的風(fēng)電機組葉片疲勞加載系統(tǒng)見圖3。
根據(jù)式(8)質(zhì)量塊運動所需合力幅值為F(t),質(zhì)量塊豎直方向上只受重力與電動缸拉力(或推力),設(shè)電動缸輸出負載為Fs,根據(jù)牛頓第二定律有:
則電動缸輸出負載為:

易知在tanωt=A/S時,F(xiàn)s有極值:

在加載方案中,采用對稱電動缸布置,故在電動缸選型及質(zhì)量塊質(zhì)量計算時,公式(16)和公式(13)應(yīng)作減半處理,即: 電動缸穩(wěn)態(tài)推力最大值:

質(zhì)量塊質(zhì)量:

由于電動缸是固定在葉片夾具上,所以對電動缸速度的選擇,以質(zhì)量塊相對于葉片加載點的速度而非質(zhì)量塊實際速度為參考,即按照式(2)而非式(6)選擇電動缸。
根據(jù)上述推導(dǎo),在有效負載力不變的情況下,可選用不同的質(zhì)量塊振幅S,不同的質(zhì)量塊質(zhì)量,相應(yīng)也會得到不同的速度、電動缸需提供的最大負載等。
表 2、圖4、圖5是以56.4m長葉片為例得到的葉片揮舞方向電動缸計算結(jié)果,質(zhì)量塊振幅從0.331m-0. 4m(對應(yīng)的行程是0.662m-0.8m)。擺振方向電動缸的設(shè)計計算方法和揮舞方向相同,本文不再贅述。
電動缸在質(zhì)量塊振幅從0.331m-0.4m時,輸出負載及速度如圖4和圖5所示。
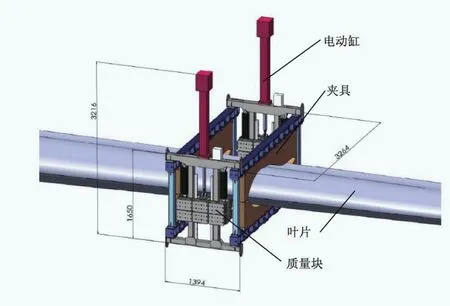
圖3 電動缸驅(qū)動的風(fēng)電機組葉片疲勞加載系統(tǒng)

表2 揮舞方向未加彈簧電動缸計算結(jié)果
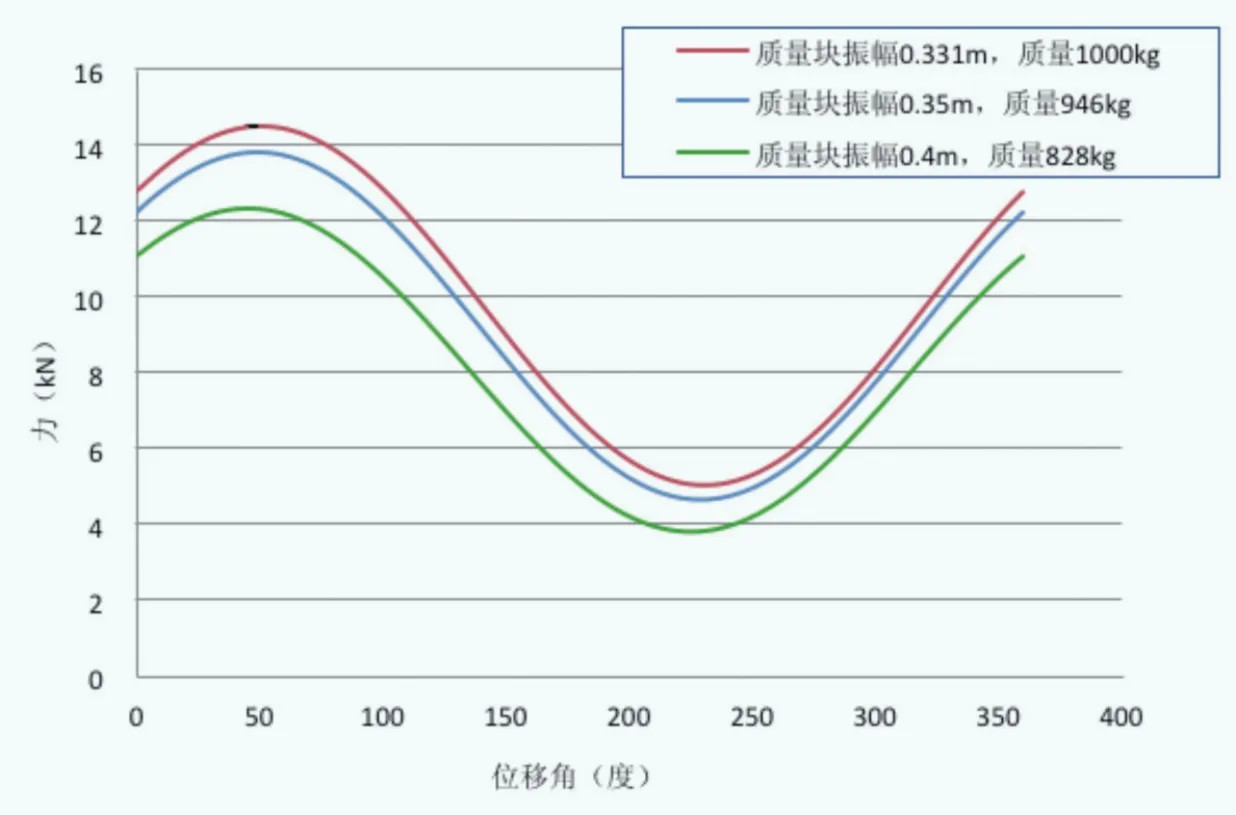
圖4 揮舞方向電動缸輸出負載
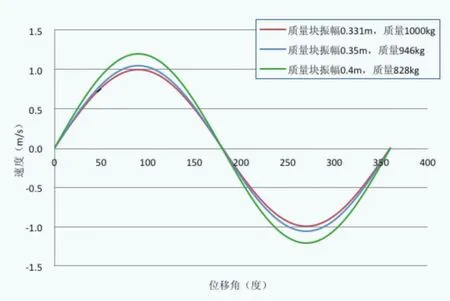
圖5 揮舞方向電動缸速度
結(jié)論
本文基于動力學(xué)基本原理推導(dǎo)出葉片疲勞試驗所需的有效激振力和加載系統(tǒng)的關(guān)系,既可用于加載系統(tǒng)的設(shè)計,也可用于已設(shè)計好的加載系統(tǒng)質(zhì)量塊的確定。由于計算所需的設(shè)計參數(shù)只是理論值,與實際情況會有一些偏差,因而系統(tǒng)在實際運行時還需要進行微調(diào)。對于已確定的加載系統(tǒng),質(zhì)量塊的振幅是固定的,但由于電動缸采用的是伺服電機驅(qū)動,加載頻率調(diào)節(jié)很方便,質(zhì)量塊設(shè)計成組裝式的,可以根據(jù)試驗要求增、減或更換質(zhì)量塊,并調(diào)節(jié)質(zhì)量塊的質(zhì)量。
(作者單位:中復(fù)連眾復(fù)合材料集團有限公司)
猜你喜歡
科學(xué)大眾(2023年17期)2023-10-26 07:39:14
計算機應(yīng)用(2022年2期)2022-03-01 12:33:42
中學(xué)生數(shù)理化·八年級物理人教版(2021年12期)2021-12-31 03:23:08
計算機應(yīng)用(2021年4期)2021-04-20 14:06:36
計算機應(yīng)用(2021年1期)2021-01-21 03:22:38
中學(xué)生數(shù)理化·中考版(2020年10期)2020-11-27 01:59:48
天天愛科學(xué)(2020年6期)2020-09-10 07:22:44
中國生殖健康(2019年2期)2019-08-23 08:12:08
數(shù)學(xué)物理學(xué)報(2017年6期)2018-01-22 02:26:40
汽車觀察(2016年3期)2016-02-28 13:16:26
