基于改進(jìn)比例諧振控制的三相四橋臂有源電力濾波器研究*
2017-09-06 10:55:42鄭宏張云王哲禹黃俊
電子器件 2017年1期
鄭宏,張云,王哲禹,黃俊
(江蘇大學(xué)電氣信息工程學(xué)院,江蘇鎮(zhèn)江212013)
基于改進(jìn)比例諧振控制的三相四橋臂有源電力濾波器研究*
鄭宏*,張云,王哲禹,黃俊
(江蘇大學(xué)電氣信息工程學(xué)院,江蘇鎮(zhèn)江212013)
在有源電力濾波器電流內(nèi)環(huán)控制環(huán)節(jié),為了實現(xiàn)對交流量的穩(wěn)態(tài)無誤差跟蹤,以及對主要特征次諧波和低次諧波進(jìn)行充分補(bǔ)償,針對諧振控制器可以無靜差地跟蹤交流參考量以及PI控制可以無靜差地跟蹤直流量的特性。采用了一種基于靜止坐標(biāo)系下的比例-積分-多頻諧振控制策略,對含量較高的主要特征次諧波和低次諧波進(jìn)行選擇性補(bǔ)償,有效的降低了系統(tǒng)的總諧波畸變率。最后,通過仿真和實驗對比分析了上述控制策略的可行性。
三相四橋臂;比例-積分-多頻諧振控制;三維空間矢量控制;諧波電流
在三相四線制低壓供電系統(tǒng)中,有源電力濾波器中的三相四橋臂拓?fù)溆捎诰哂兄绷鱾?cè)電壓控制簡單的特點成為主要的拓?fù)浣Y(jié)構(gòu)[1]。然而,APF的跟蹤性能直接影響諧波補(bǔ)償?shù)男ЧT谘a(bǔ)償電流跟蹤控制模塊中,經(jīng)常使用的電流控制策略有滯環(huán)控制,比例積分控制,無差拍控制等。其中滯環(huán)控制具有較快的動態(tài)響應(yīng)特性并且易于實現(xiàn),但是滯環(huán)控制中的寬度的選擇直接關(guān)系到電力電子器件的開關(guān)頻率,損耗以及達(dá)到的跟蹤效果[2-3]。PI控制算法簡單便于理解,但是它只能無靜差地跟蹤直流參量,對于交流參量的跟蹤效果并不理想[4]。無差拍控制易于數(shù)字化實現(xiàn),但是它的魯棒性能比較差,因而會出現(xiàn)瞬態(tài)響應(yīng)超調(diào)大的現(xiàn)象[5-6]。
在三相四線制不平衡系統(tǒng)中投入非線性負(fù)載時,系統(tǒng)的諧波電流主要以6k±1次諧波為主[7]。由于在理想的情況下諧振控制器在諧振頻率處有無窮大的增益,因此可以利用它這個的特點在諧振頻率處重點補(bǔ)償含量較多的低次諧波來降低總的諧波畸變率。本文結(jié)合PI控制簡單,實現(xiàn)成本低,可靠性高的優(yōu)點,在此基礎(chǔ)上并聯(lián)多個諧振控制分別對5、7、11、13、17、19次低次諧波進(jìn)行重點補(bǔ)償,通過比例-積分-多頻諧振控制降低總的諧波畸變率。
1 三相四橋臂APF的拓?fù)浣Y(jié)構(gòu)和控制算法
圖1是并聯(lián)型有源電力濾波器的系統(tǒng)結(jié)構(gòu),系統(tǒng)補(bǔ)償?shù)膶ο笫且粋€非線性負(fù)載。
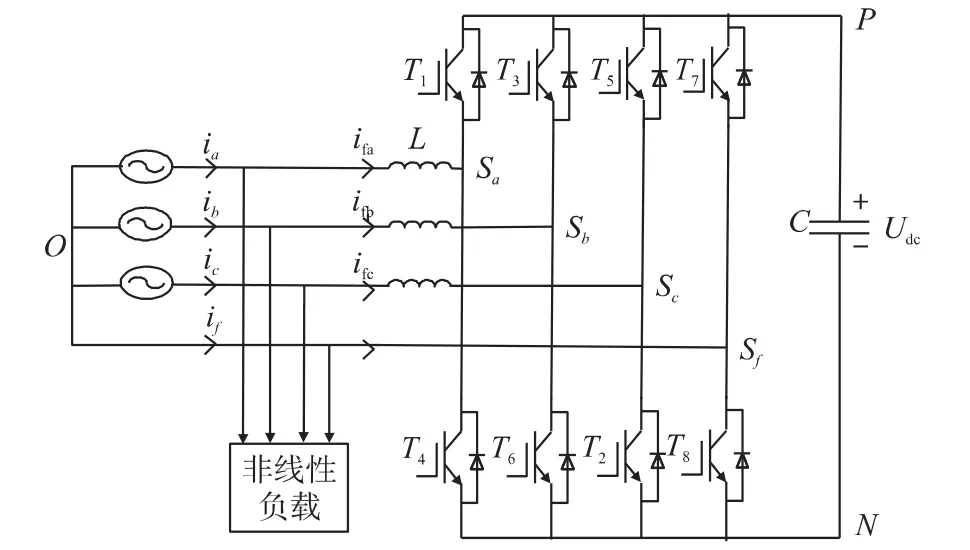
圖1 三相四線制四橋臂主電路結(jié)構(gòu)
由于Sa、Sb、Sc、Sf分別表示a、b、c、f 4個橋臂的開關(guān)狀態(tài),我們令每個橋臂上管開通、下管關(guān)斷為1,反之上管關(guān)斷、下管開通為0,就可以得到16個空間開關(guān)矢量,將上面的16個開關(guān)狀態(tài)在靜止坐標(biāo)系abc下畫成矢量圖就可以得到一個空間的十二面體如圖2所示。
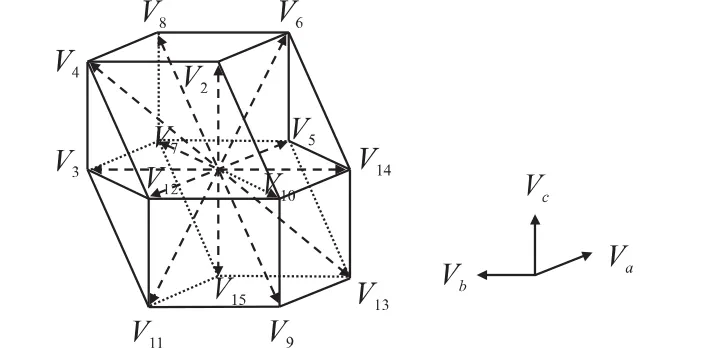
圖2 四橋臂逆變器在abc坐標(biāo)系下的開關(guān)矢量
V1到V8在12面體上半部分,即正的區(qū)域。V9到V16在12面體的下半部分,即負(fù)的區(qū)域。這16個開關(guān)狀態(tài)每個立方體的邊長為1,在圍成空間的十二面體中,有6個面與坐標(biāo)軸平行,分別是Va=±1,Vb=±1,Vc=±1,有6個面與坐標(biāo)軸呈45°角,分別是Va-Vb=±1,Vb-Vc=±1,Va-Vc=±1。因此,可以用平面Va=0、Vb=0、Vc=0和Va-Vb=0、Vb-Vc=0、Va-Vc=0將控制區(qū)域進(jìn)行分割。這樣控制區(qū)域可以分為24個空間四面體,并且每一個空間四面體有3個基本矢量和兩個零矢量構(gòu)成。確定參考矢量所在的四面體后,根據(jù)空間合成的原理,計算出3個非零開關(guān)矢量及零矢量所對應(yīng)的占空比,并選擇在一個開關(guān)周期插入一種零矢量[0000],開關(guān)矢量用中心對稱排序方式,從而算出各個橋臂開關(guān)作用的時間,得到控制電力電子器件開關(guān)的PWM脈沖。
2 諧振控制器的設(shè)計
有源電力濾波器采用電壓外環(huán),電流內(nèi)環(huán)的雙閉環(huán)控制策略。其中電流內(nèi)環(huán)用來跟蹤補(bǔ)償電流。
2.1 傳統(tǒng)的PI控制原理

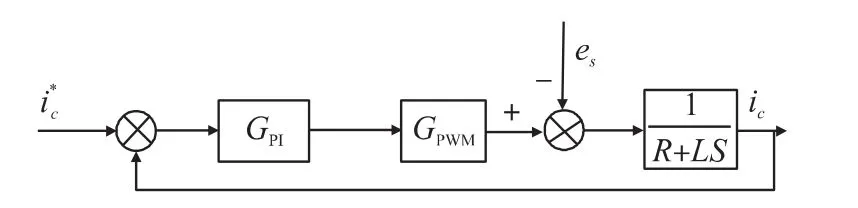
圖3 PI控制原理圖
PI控制雖然算法簡單、實現(xiàn)成本低、可靠性高,而且已經(jīng)被廣泛的應(yīng)用到自動化系統(tǒng)和工業(yè)控制系統(tǒng)中,但PI調(diào)節(jié)器對正弦參考電流很難達(dá)到理想的控制效果[8],不能實現(xiàn)無靜差跟蹤而且不能實現(xiàn)對特定次諧波的完全補(bǔ)償。
2.2 比例諧振控制器
當(dāng)給定的參考信號是直流信號時,控制器只需要包含常規(guī)的積分器,就可以保證系統(tǒng)的無穩(wěn)態(tài)誤差,而當(dāng)參考信號具有某一頻率的周期信號時,就必須要采用廣義積分器,結(jié)構(gòu)如圖4所示。
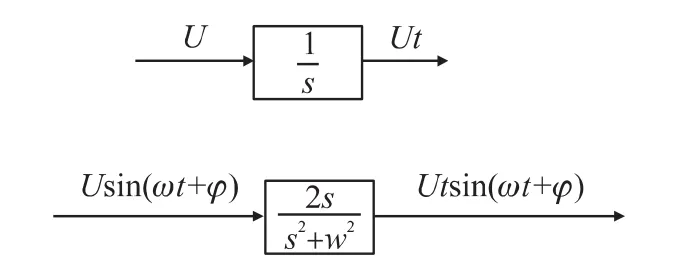
圖4 常規(guī)積分器與廣義積分器
對于常規(guī)積分器,當(dāng)輸入直流信號U時,其輸出Ut,而對廣義積分器,當(dāng)輸入為某一頻率的正弦信號u(t)=U sin(ωt+φ),其輸出為y(t)=Ut sin(ωt+ φ),這就是廣義積分的無靜差性;當(dāng)輸入信號具有偏差Δω時,即:

當(dāng)Δω?0時,其輸出為:

在有源電力濾波器中,負(fù)載的諧波階次通常為奇數(shù)次諧波,則:Δω=2πfB=314 rad/s或4πfB=628 rad/s,它們都滿足Δω?0的條件。
因此廣義積分器具有頻率選擇和無靜差跟蹤特定次諧波的特性。諧振控制器的傳遞函數(shù)一般表示為:
式中:ki是積分系數(shù),ω0是諧振控制器的諧振頻率。當(dāng)ki=1,ω0=100πrad/s時,其幅頻特性如5所示。
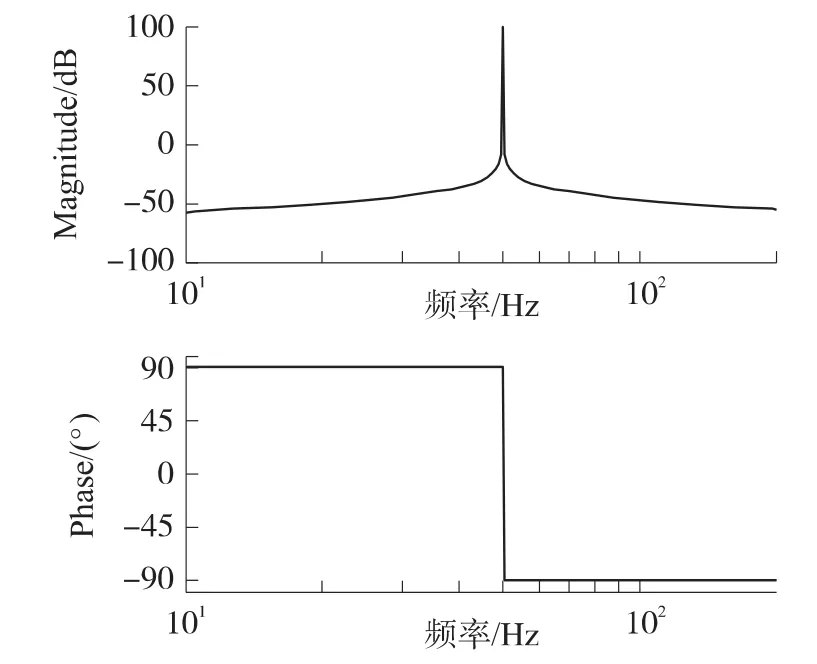
圖5 諧振控制的幅頻特性
從幅頻的波特圖可以看出,諧振控制器在f=50 Hz的諧振頻率處增益為無窮大,并且能有效地衰減非諧振處的信號。但是由于其帶寬窄,魯棒性差,所以當(dāng)電網(wǎng)頻率波動時,不能對參考信號有效跟蹤,影響控制效果,因此需要對傳統(tǒng)的PR控制進(jìn)行改進(jìn),改進(jìn)的PR控制器的傳遞函數(shù)為:
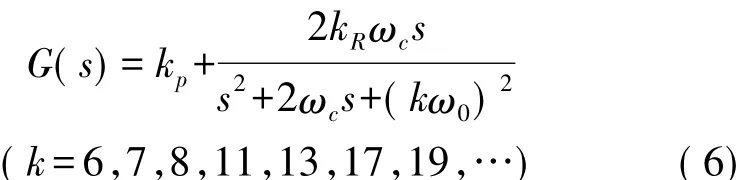
式中:ωc是截止頻率,ω0是基波諧振頻率,kp是比例系數(shù),kR為諧振系數(shù),k是特定諧波次數(shù)。其中ω0=100π,k是要補(bǔ)償?shù)闹C波次數(shù),這兩個都是已知參數(shù),因此需要設(shè)計的就是ωc、kp和kR,為了便于分析,設(shè)其中2個參數(shù)不變,通過觀察第3個參數(shù)對系統(tǒng)性能的影響來確定合適的值。首先設(shè)kp,kR不變,觀察ωc對系統(tǒng)的影響,如圖6所示。
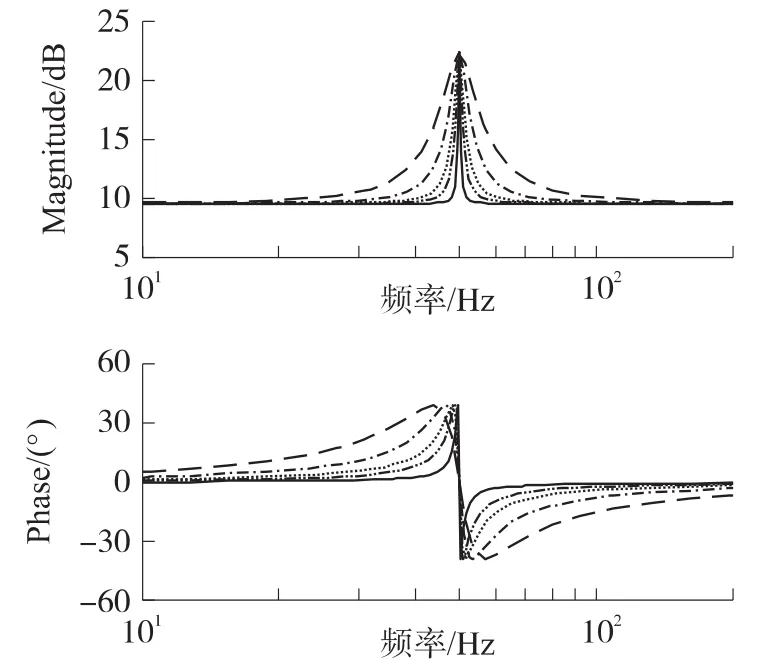
圖6 ωc對幅頻相頻特性的影響
由波特圖可以看到,ωc越大,帶寬也就越大,采用改進(jìn)型的PR控制可以增加帶寬,減弱電網(wǎng)頻率波動對特定次諧波補(bǔ)償效果的影響。根據(jù)帶寬的定義,|G(jω)|=kR/對應(yīng)的兩個頻率差即為帶寬,經(jīng)過計算,PR控制器的帶寬為ωc/πHz。根據(jù)國家電網(wǎng)頻率波動標(biāo)準(zhǔn)B級,容許的波動范圍是+0.5 Hz~-0.5 Hz,留有一定的裕度,取波動范圍為+0.7 Hz~-0.7 Hz,可得ωc/π=1.4 Hz,則ωc= 4.4 rad/s。
同理,取kR=1,ωc=4.4,不同的kp波特圖如圖7所示,隨著kp的增大,準(zhǔn)諧振控制器的諧振作用減少,對頻率的選擇性補(bǔ)償也減小,容易引起諧振頻率和其他頻率相互干擾,對系統(tǒng)穩(wěn)定性不好。因此kp的取值不能太大或太小,因此這里取kp=3。
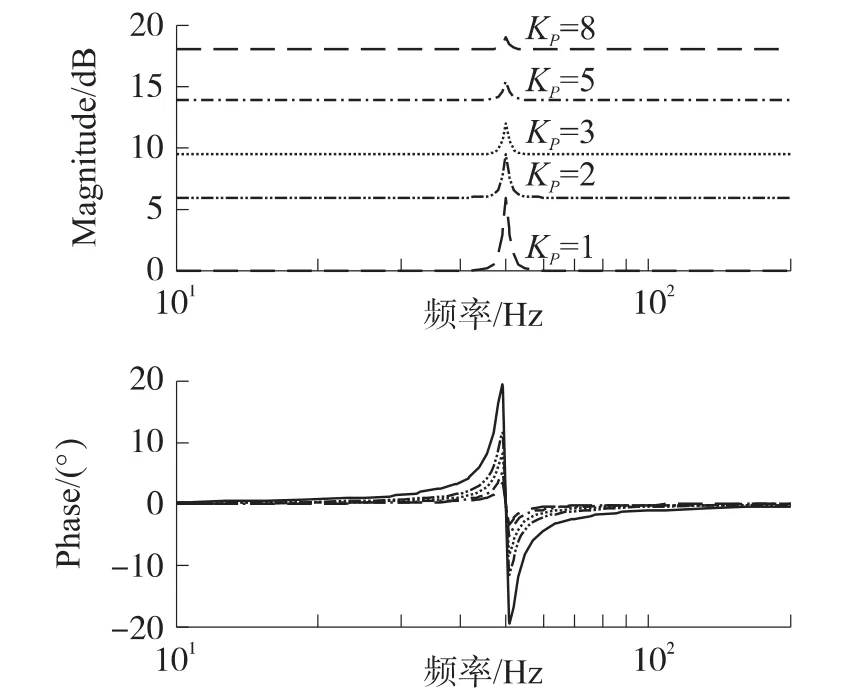
圖7 kp對幅頻相頻特性的影響
令kp=3,ωc=4.4,改變kR的數(shù)值,就可以得到如圖8所示的波特圖,從圖中可以看到,kR越大,在諧振處的增益也就越大,這里取kR=10來保證對特定次諧波交流量的無靜差跟蹤。
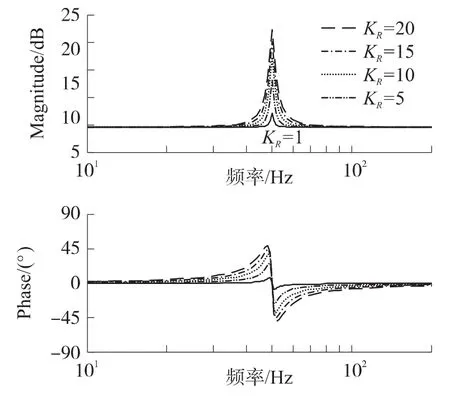
圖8 kR對幅頻相頻特性的影響
在三相四線制系統(tǒng)中,投入非線性負(fù)載時,諧波主要次數(shù)是5、7、11、13、17、19等6k±1次諧波。因此本文主要對20次以下的主要諧波進(jìn)行補(bǔ)償,通過多個諧振控制器的并聯(lián)來實現(xiàn)對特定次諧波的無穩(wěn)態(tài)誤差控制。比例-積分-多頻諧振控制的原理圖如圖9所示。
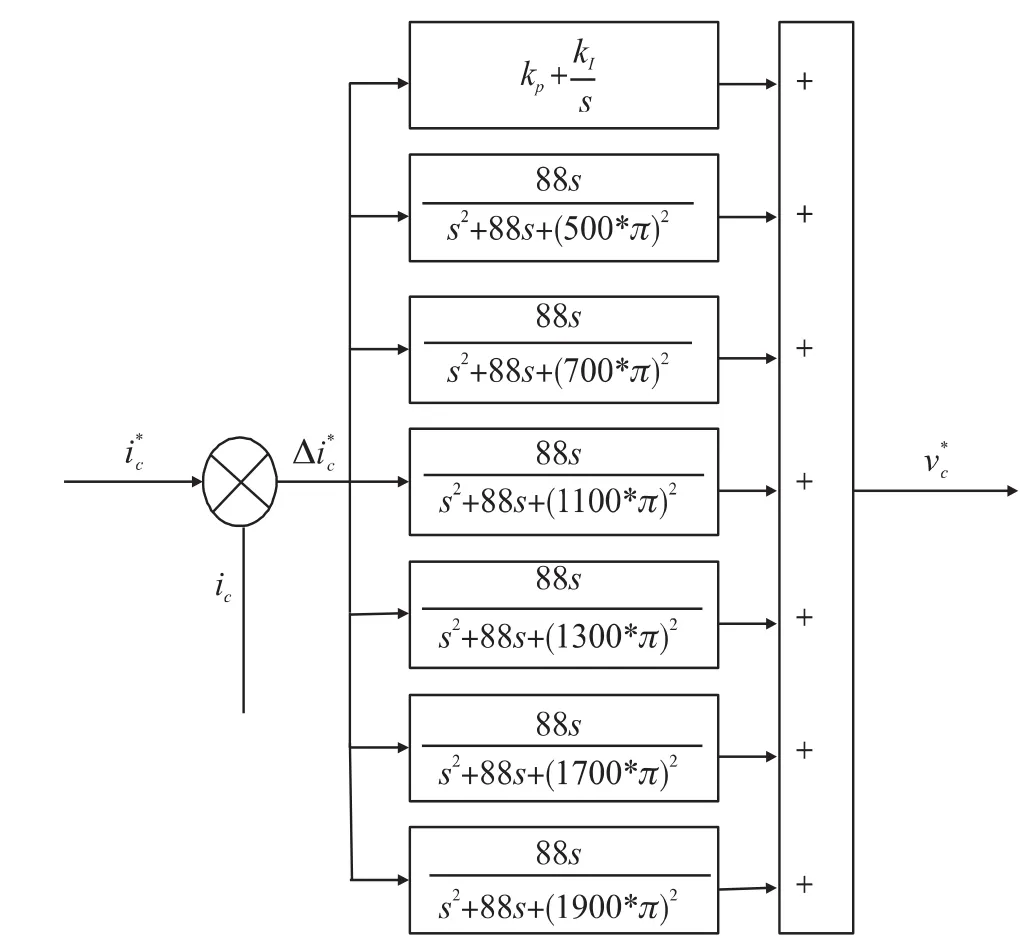
圖9 準(zhǔn)諧振控制原理圖
3 比例-積分-多頻諧振控制在三相四線制APF下的仿真
為了驗證在靜止坐標(biāo)系下比例-積分-多頻諧振控制正確性和有效性,這里用MATLAB里的Simulink工具搭建了三相四線制有源電力濾波器系統(tǒng)的仿真模型,總的系統(tǒng)模型如圖10所示。
仿真參數(shù)的選擇:交流測電壓為220 V/380 V,電網(wǎng)電壓的頻率為50 Hz,主電路交流測的電感為4.22 mH,主電路直流側(cè)電容參考電壓為800 V,諧波負(fù)載為阻感負(fù)載的三相不控橋整流電路,其中R=28Ω,L=4mH,開關(guān)頻率為12.8 kHz。
如圖10所示,該系統(tǒng)模型是由電源模塊,負(fù)載模塊,檢測模塊,比例-積分-多頻諧振控制模塊還有APF這5個不同的子模塊組成,為了驗證有源電力濾波器在空間矢量調(diào)制算法下對中線的補(bǔ)償能力,因此本文搭建了三相四線制不平衡系統(tǒng)。對于檢測模塊,這里我們用的是基于同步坐標(biāo)變換的d-q-0檢測法。有源電力濾波器模塊的作用是對檢測到的系統(tǒng)的諧波進(jìn)行補(bǔ)償,產(chǎn)生與之等值,方向相反的電流。
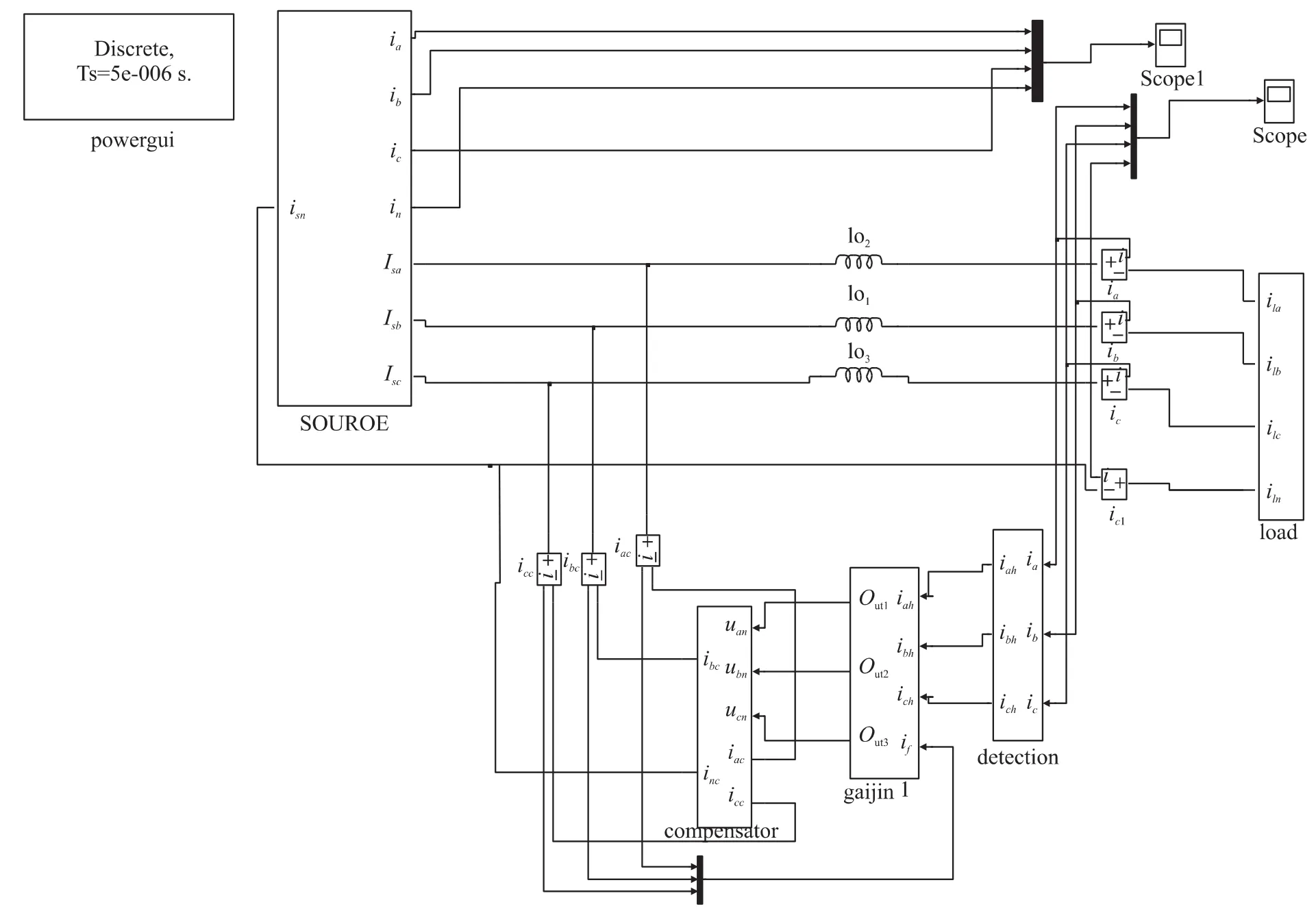
圖10 有源電力濾波器系統(tǒng)的仿真模型
如圖11所示,是補(bǔ)償之前的三相電網(wǎng)電流波形,由于搭建的是三相四線制非線性不平衡系統(tǒng),所以這里的a,b,c三相電流的幅值不相等,形狀近似馬鞍波。其中a相的電流值為50 A左右,b,c兩相的電流值為28 A左右,圖上中線電流呈正弦波,幅值為30 A。
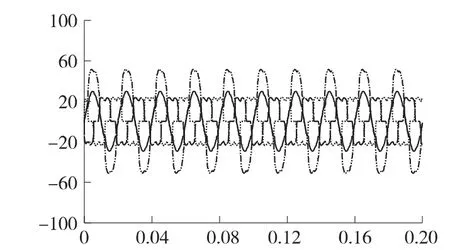
圖11 補(bǔ)償之前的三相電網(wǎng)電流波形
圖12是采用PI控制器補(bǔ)償之后的三相電網(wǎng)電流波形,系統(tǒng)的反應(yīng)時間在0.01 s之內(nèi),由于時間的限制這里總的仿真時間取到0.2 s,由圖可見補(bǔ)償后a,b,c三相由原來幅值不等的馬鞍波變?yōu)榉迪嗟龋瑸?8 A左右,相角相差120°標(biāo)準(zhǔn)的正弦波,同時,中線電流也得到了很好的補(bǔ)償,由原來的幅值為28 A的正弦波變?yōu)榉岛苄≡?上下擺動的小波。并通過FFT分析可知,A、B、C相總的諧波畸變率由原來的11.29%,26.38%,
25.92 %降低為2.54%,2.70%,2.39%,如圖13所示。
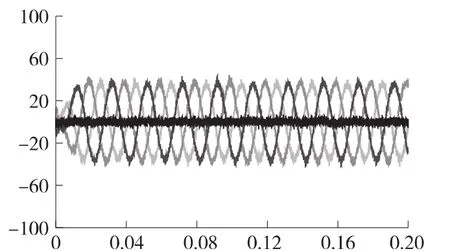
圖12 PI控制補(bǔ)償之后的三相電網(wǎng)電流波形
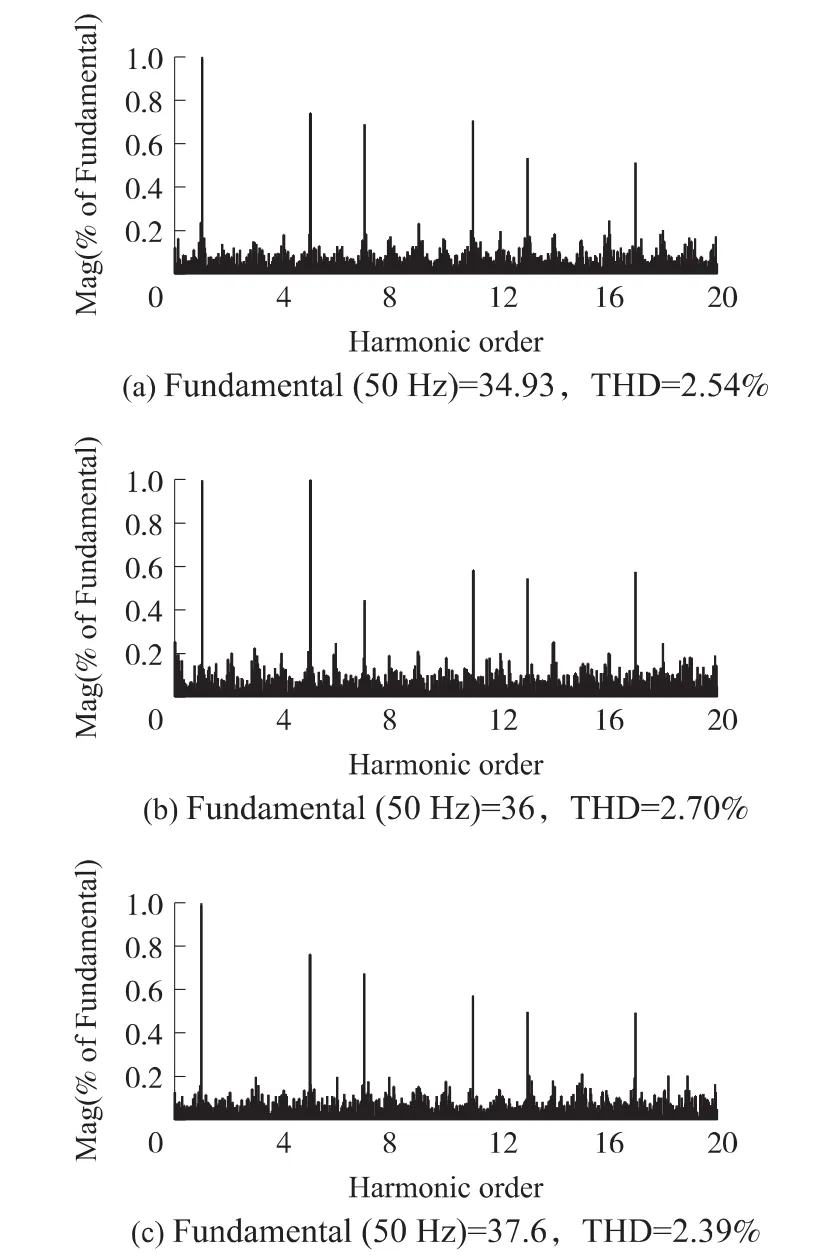
圖13 采用PI控制器進(jìn)行補(bǔ)償之后的ABC三相總諧波畸變率
如圖14所示,是采用比例-積分-多頻諧振控制補(bǔ)償之后的三相電網(wǎng)電流波形。通過對比圖14和圖12可以明顯發(fā)現(xiàn),采用比例-積分-多頻諧振控制后的三相電網(wǎng)波形毛刺變少,為標(biāo)準(zhǔn)正弦波,相較于PI控制更加光滑。再對比圖13和圖15的FFT分析,可以看到,后者ABC三相的總諧波畸變率都降到了2%以下分別為:1.66%,1.67%,1.56%。它的20次以下的諧波中,5、7、11、13、17、19相對PI控制都得了很好的補(bǔ)償。
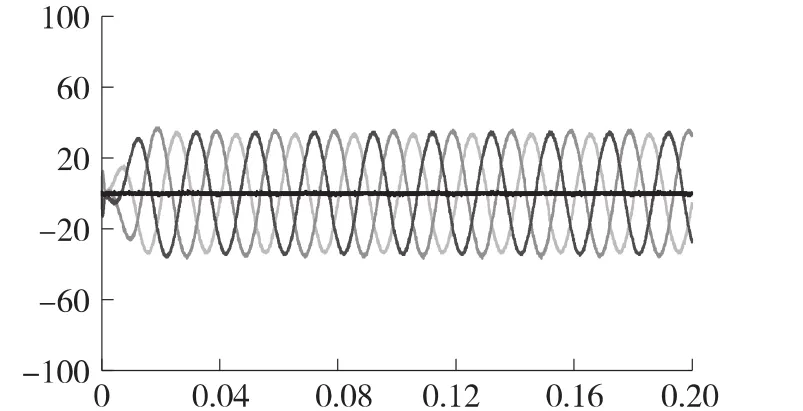
圖14 采用比例-積分-多頻諧振控制補(bǔ)償之后的三相電網(wǎng)電流波形
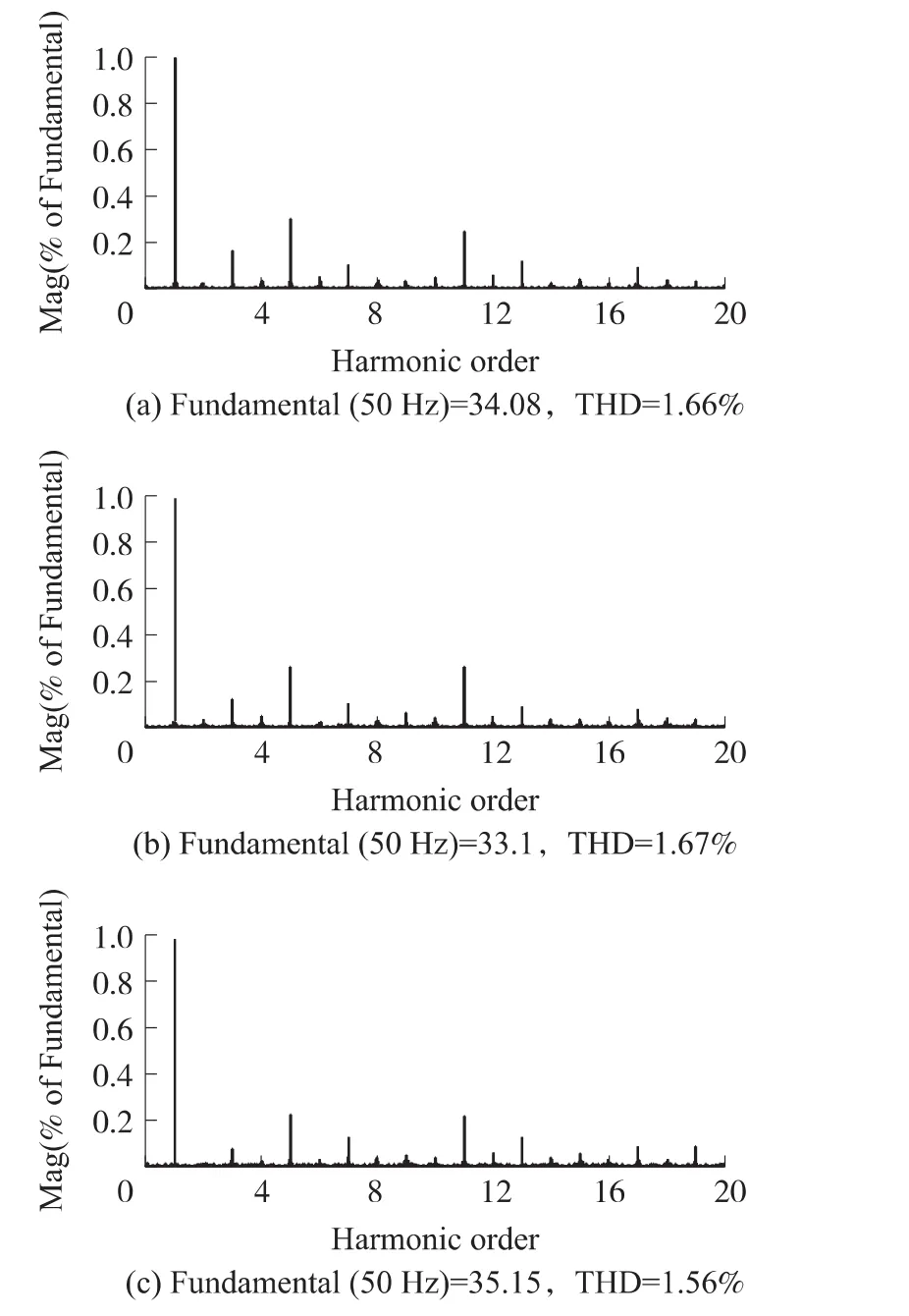
圖15 采用比例-積分-多頻諧振控制
為了驗證改進(jìn)的比例諧振控制器的動態(tài)性能,這里在MATLAB的環(huán)境下添加Breaker器件,在0.04 s之前系統(tǒng)的負(fù)載是線性三相平衡負(fù)載,在0.04 s之后所帶負(fù)載是三相非線性不平衡負(fù)載,有源電力濾波器在0.08 s的時候投入使用。具體的動態(tài)性能如圖16所示。從圖16可以看出控制器的反應(yīng)時間很短,可以很快的響應(yīng)并且進(jìn)行濾波。
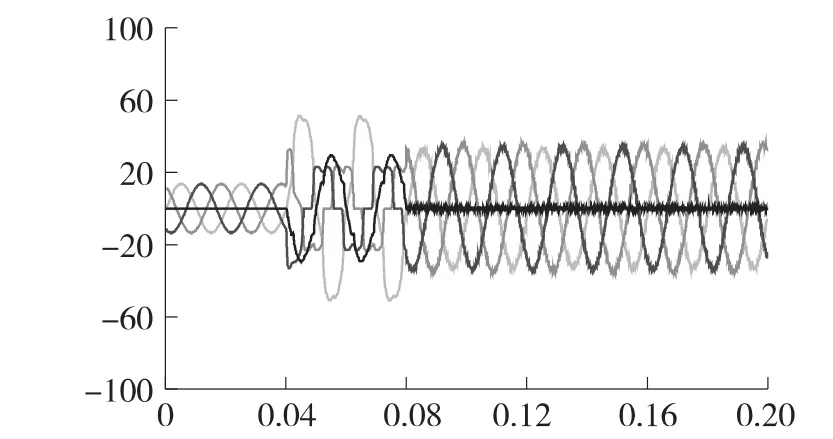
圖16 比例-積分-多頻諧振控制器的動態(tài)響應(yīng)圖
4 實驗
為了進(jìn)一步驗證控制策略的有效性,這里搭建了三相四線制APF樣機(jī),實驗平臺由非線性負(fù)載,四橋臂APF主電路,四橋臂APF控制電路3部分組成。實驗中的APF開關(guān)器件選擇型號為FF150R17ME3G的IGBT模塊,相應(yīng)的驅(qū)動采用CONCEPT公司的2SP0115T2A0-17。交流側(cè)電壓為220 V/380 V,電網(wǎng)電壓的頻率為50 Hz,主電路交流測的電感為4 mH,主電路直流側(cè)電容參考電壓為800 V,開關(guān)頻率為
12.8 kHz。諧波負(fù)載為阻感負(fù)載的三相不控橋整流電路,其中R=30Ω,L=4mH。
圖17和圖18分別是以A相為例,采用PI控制器和比例-積分-多頻諧振控制器進(jìn)行補(bǔ)償?shù)木W(wǎng)側(cè)電流的實驗波形,相對PI控制而言本文提出的改進(jìn)的控制器控制效果更好,A相的網(wǎng)側(cè)電流更加平滑,毛刺較少,同時總諧波畸變率相對PI控制更低,在這里只補(bǔ)償了20次以下的諧波。實驗結(jié)果和仿真結(jié)果相一致。
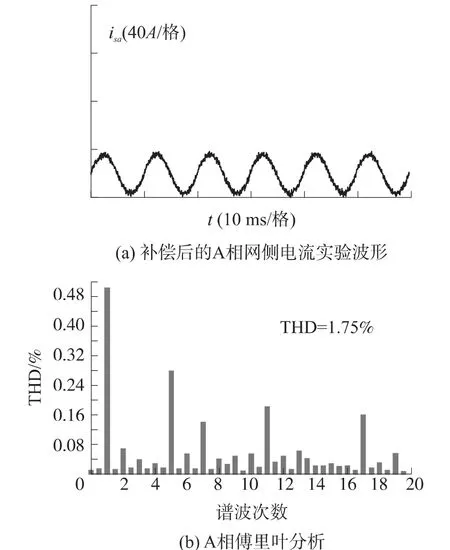
圖17 PI控制的實驗波形
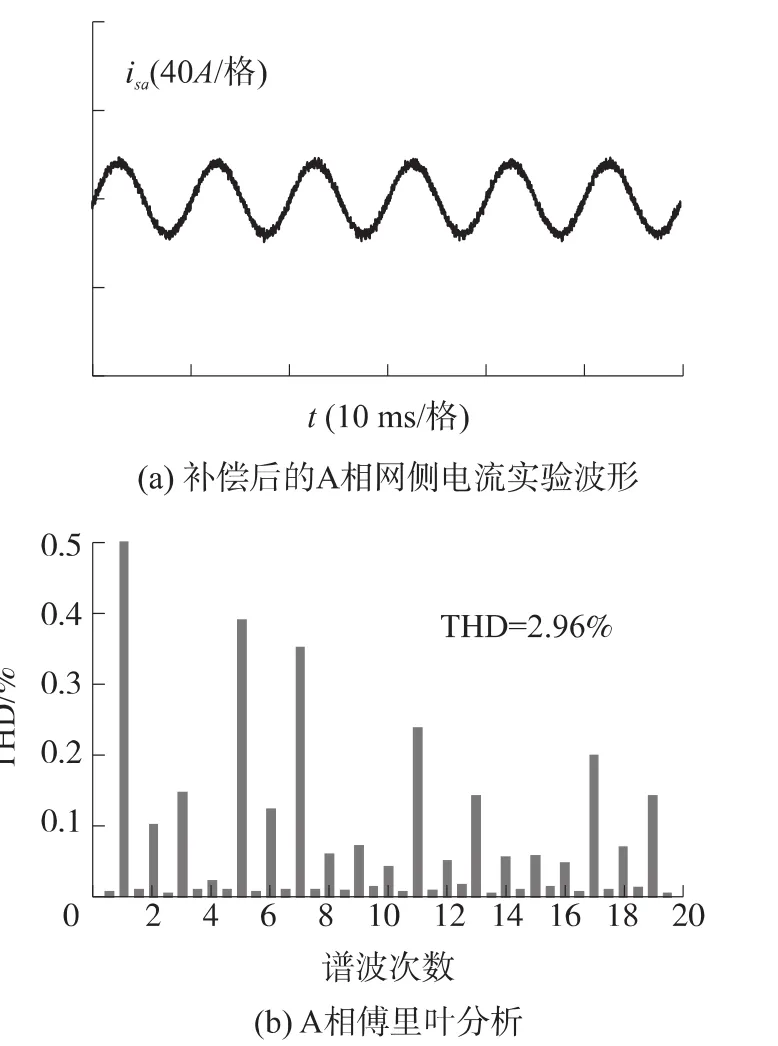
圖18 比例-積分-多頻諧振控制的實驗波形
5 結(jié)論
本文首先簡單介紹了三相四橋臂拓?fù)涞目臻g矢量調(diào)制算法。針對有源電力濾波器的控制策略,考慮到諧振控制器的特點,在傳統(tǒng)的PI控制器基礎(chǔ)上采用了比例-積分-多頻諧振控制,通過并聯(lián)多個諧振控制器對含量較高的低次諧波進(jìn)行重點補(bǔ)償,這里文章只補(bǔ)償了20次以下的5、7、11、13、17、19次諧波。最后通過MATLAB仿真軟件和實驗平臺對采用的控制器進(jìn)行了仿真和實驗驗證以及FFT分析,通過與PI控制器的仿真效果進(jìn)行對比可以發(fā)現(xiàn)比例-積分-多頻諧振控制的在三相四線制有源電力濾波器的補(bǔ)償效果更好且具有很快的動態(tài)響應(yīng)特性。這對于三相四線制低壓農(nóng)網(wǎng)具有重要的研究意義。
[1]王曉剛,謝運(yùn)祥,帥定新,等.四橋臂逆變器的快速三維SVPWM算法[J].華南理工大學(xué)學(xué)報(自然科學(xué)版),2009,37 (7):94-99.
[2]粟時平,李圣怡.并聯(lián)有源濾波器的最優(yōu)電壓滯環(huán)電流控制[J].電力自動化設(shè)備,2002,22(4):14-17.
[3]李正明,唐靜.基于PI控制的有源濾波器中的研究[J].電子器件,2014,37(5):987-990.
[4]唐欣,羅安,涂春鳴.基于遞推積分PI的混合型有源電力濾波器電流控制[J].中國電機(jī)工程學(xué)報,2003,23(10):38-41.
[5]Mohammad Sedighy,Shashi BDewan,F(xiàn)rancis PDawson.A Robust Digital Current Control Method for Active Power Filters[J].IEEE Trans on Industry Applications,2000,36(4):1158-1164.
[6]Shin-Ichi Hamasaki,Atsuo Kawamura.Improvement of Current Regulation of Line-Current-Detection-Type Active Filter Based onDeadbeat Control[J].IEEE Trans on Industry Applications,2003,39(2):536-541.
[7]葉夢云.基于DSP的三相四橋臂有源濾波器的研究[D].北京交通大學(xué),2014:4.
[8]張曉,李新宇,周睿.三相四橋臂并聯(lián)型APF無差拍控制策略的研究[J].電力系統(tǒng)保護(hù)與控制,2011,39(20):78-83.

鄭宏(1965-),男,漢族,教授,博士,碩士生導(dǎo)師,主要研究方向為大功率電力電子變換器,分布式發(fā)電;

張云(1990-),女,漢族,碩士研究生,電氣工程專業(yè),主要研究方向為大功率電力電子變換器,有源電力濾波器,niantianhebaiyun@126.com。
Research on Improved PI-MFR Current Controller in Three Phase Four Leg APF*
ZHENG Hong*,ZHANG Yun,WANG Zheyu,HUANG Jun
(College of Electrical and Information Engineering,Jiangsu University,Zhenjiang Jiangsu 212013,China)
In three phase four wire power supply system,traditional PI control can not track dc reference volume exactly,and also can’t adequately compensate main characteristic harmonics and low order harmonics.Then,the advantage of PI controller is tracking dc referencewithout static error in a fast speed,while PR controller can track the ac reference volume errorless and fast.Combining the advantages of them both,this paper adopted a proportionalintegral-multiple frequency resonance current controller in stationary coordinates.Finally,building the whole three phase four wire system of APF.By comparison with PI controller,the proportional-integral-multiple frequency resonance current controller has a fast dynamic response and can effectively reduce the rate of total harmonic distortion.The experiment proved the correctness of the theory.
four bridge arms topology;the proportional-integral-multiple frequency resonance current controller; 3-D SVM;harmonic current
C:1270
10.3969/j.issn.1005-9490.2017.01.045
TM 713.8;TM 48
:A
:1005-9490(2017)01-0237-07
項目來源:江蘇高校優(yōu)勢學(xué)科建設(shè)工程項目(61074019)
2015-09-24修改日期:2015-10-20
