一種用于個人導航系統(tǒng)的低精度MEMS器件標定方法
2017-09-04 03:14:35梁佩雷許江寧程章
艦船電子工程 2017年8期
關鍵詞:模型
梁佩雷許江寧程章
(海軍工程大學導航工程系武漢430033)
一種用于個人導航系統(tǒng)的低精度MEMS器件標定方法
梁佩雷許江寧程章
(海軍工程大學導航工程系武漢430033)
針對個人足部導航MEMS器件誤差較大,直接影響個人導航精度的問題,論文采用了一種十二位置標定法。首先建立陀螺儀和加速度計的輸入輸出誤差模型,然后給出十二位置標定的位置編排,最后通過三軸轉(zhuǎn)臺實驗,得出標定結(jié)果。結(jié)果表明,補償后的MEMS器件誤差有所減小,為提高個人鞋式導航系統(tǒng)的精度打下了基礎。
個人導航;微型慣性器件;標定方法
Class NumberTN96
1 引言
個人導航系統(tǒng)(Personal Navigation System),是由個人攜帶,可以實時確定行人方向、速度、位置信息的系統(tǒng),主要用于確定行人的實時位置[1~3]。以微型慣性器件為核心的個人導航模塊,可以在室內(nèi)、水下、森林等無GPS信號或GPS信號弱的環(huán)境下實現(xiàn)定位導航功能。適用于士兵、警察以及從事消防、搶險等高危險工作的人員,用以提供在危險場所的實時定位;同時,在地下勘測、叢林探險等無GPS信號或GPS信號弱的情況下,個人導航系統(tǒng)也可以發(fā)揮其定位導航的功能[4~8]。
基于MEMS的個人導航系統(tǒng)在本質(zhì)上是以慣性導航基本原理為基礎,利用自身傳感器進行位置的推算,從而實現(xiàn)定位與導航。MEMS器件具有重量輕、體積小、價格低廉、便于在人體上的安裝與攜帶等優(yōu)點[9~13],但是MEMS傳感器的精度低,采用一般的捷聯(lián)慣性導航解算方法已無法滿足定位精度要求。針對此,國內(nèi)很多學者提出了優(yōu)化算法。西北工業(yè)大學張金亮、秦永元等[14]在研究低精度鞋式個人慣性導航系統(tǒng)修正算法的基礎上,引入了零速修正算法,導航精度達2%;上海交通大學茅旭初、孫作雷等[15]提出低成本步行者航位推算的方法,經(jīng)測試行走1km,定位的累積誤差小于10m。
同時,有研究表明[16],基于MEMS的個人導航系統(tǒng)中80%的誤差來源于器件誤差。所以,在無法提高器件精度的條件下,對MEMS器件進行標定與補償也能在很大程度上減小導航誤差,提高定位的精度。針對二十四位置標定方法[7]時間過長,且多次旋轉(zhuǎn)還可能引入轉(zhuǎn)臺轉(zhuǎn)動誤差的問題,本論文采用一種十二位置標定的方法,利用三軸轉(zhuǎn)臺,對MEMS加速度計進行標定,同時測量陀螺儀的漂移[17-20]。結(jié)果表明,補償后的MEMS器件誤差有所減小,能夠提高個人導航的精度。
2 MEMS組成結(jié)構(gòu)
本實驗所采用的MEMS器件為以MPU6050慣性測量單元、HMC5883三軸磁力計和BMP180氣壓高度計組成的模塊,如圖1所示。
本實驗主要是對MPU6050集成的三軸加速度計和三軸陀螺儀進行標定。該器件是著名的9軸運動處理傳感器。它集成了3軸MEMS陀螺儀,3軸MEMS加速度計以及一個可擴展的數(shù)字運動處理器,可用I2C接口連接一個第三方的數(shù)字傳感器,比如本模塊中的HMC5883磁力計。擴展之后就可以通過其I2C或SPI接口輸出一個9軸的信號。通過組合導航算法即可輸出速度和位置信息。為方便對其進行標定時數(shù)據(jù)的采集,需要DB15接頭、仿真器和自制轉(zhuǎn)接線。
3 MEMS器件誤差模型
MEMS慣性器件的誤差模型本質(zhì)上是建立MEMS器件的輸入輸出模型,標定的目的即為計算出該模型中的系數(shù)矩陣,對誤差進行補償,從而提高器件的精度。本文利用三軸轉(zhuǎn)臺進行了靜態(tài)測試實驗,標定出MEMS加速度計的各項參數(shù),同時可以得出MEMS陀螺的零偏值。
3.1 MEMS陀螺誤差模型
MEMS陀螺的誤差主要包括刻度因數(shù)、安裝誤差和零偏。由于MEMS陀螺輸出為的角速率,因此將實際角速率作為輸入,MEMS陀螺輸出的角速率為輸出,由此建立陀螺的誤差模型。
3.2 MEMS加速度計誤差模型
與陀螺儀的誤差模型類似,MEMS加速度計的誤差模型為
展開如下
4 十二位置靜態(tài)標定方法
4.1 標定十二位置編排
十二位置編排方式為載體坐標系上三軸分別朝上、朝下各一次,在每種朝向上轉(zhuǎn)臺轉(zhuǎn)動180?,用來抵消轉(zhuǎn)臺尋北的誤差。在轉(zhuǎn)臺靜止時對加速度計和陀螺儀的數(shù)據(jù)進行采集,編排如下表所示。
4.2 實驗步驟
1)將三軸加速度計安裝于三軸轉(zhuǎn)臺臺面的中心,Z軸垂直于轉(zhuǎn)臺臺面,X、Y軸分別與轉(zhuǎn)臺臺面平行;
2)轉(zhuǎn)臺通電,同時給器件供電,穩(wěn)定5min后,調(diào)整轉(zhuǎn)臺外框、中框與內(nèi)框以表1的位置運行,各軸敏感的重力加速度也如表1所示;
3)期間,利用上位機軟件對MEMS三軸加速度計和陀螺儀輸出的數(shù)據(jù)進行采集,每個位置點靜止采集2min,采樣頻率設置為100Hz。
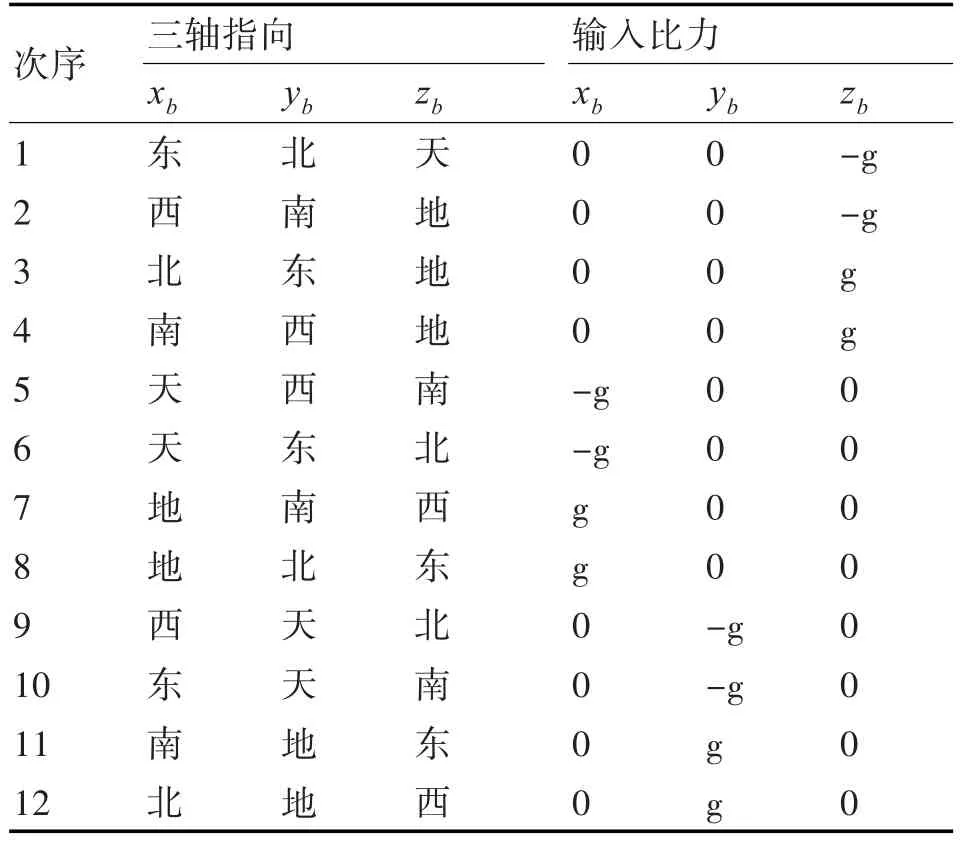
表1 十二位置編排
4)讀取MEMS加速度計和陀螺儀的輸出值,根據(jù)不同位置的輸出值可以得出標定系數(shù)。
4.3 誤差模型參數(shù)計算
采用十二位置法在標定MEMS加速度計的同時,可以標定出陀螺儀的零偏,在表1的前四個順序中,三軸分別出現(xiàn)了正反方向,從而可以抵消X軸向上的影響,計算出X軸方向上的陀螺零偏,前四個位置陀螺的平均輸出為
同理,Y軸和Z軸方向上的MEMS陀螺零偏的計算與X軸類似。
對MEMS加速度計的參數(shù)進行標定時,將式(4)可以表示為
相加得X軸方向上陀螺零偏為
[fxfyfz]T為當前位置時的加速度計輸出的平均值,為當前位置重力的輸出,多次位置實驗后可以寫出下式
利用最小二乘法即可計算出所有的參數(shù)。
5 實驗結(jié)果
實驗所用三軸轉(zhuǎn)臺及測試環(huán)境如圖2、3所示。
十二位置標定結(jié)果如表2所示。

表2 十二位置標定結(jié)果
為了驗證補償結(jié)果,將三軸轉(zhuǎn)臺內(nèi)框、中框、外框分別調(diào)至一定位置,在理論上X軸、Y軸和Z軸的輸出為7.34m/s2、4.90m/s2和4.24m/s2,陀螺儀的輸出為0,標定前和補償后的結(jié)果如圖4、圖5所示,淺灰色為補償后的輸出,深灰色為原始輸出。
由圖所示可以明顯看出,加速度計的補償效果較好,但是陀螺儀的補償效果較差。
6 結(jié)語
通過十二位置標定法,可以較好地標定出加速度計的各項誤差參數(shù),同時也能測得陀螺的零偏值。補償后的MEMS加速度計的輸出明顯好于未補償之前的原始輸出,證明了模型和實驗的有效性。但是本次實驗也存在一定問題,首先是陀螺儀的輸出沒有得到較好的補償,分析有如下幾點原因:一是MEMS陀螺儀出廠前經(jīng)過校正,零偏值已經(jīng)很小,所以補償效果較差;二是本方法只能測得陀螺的零偏值,無法測量陀螺漂移,而陀螺漂移是陀螺儀中重要的誤差項,對陀螺的輸出影響較大,因此,還需要設計相應實驗,測得陀螺誤差項中的其它量,這樣補償后的陀螺輸出才更接近于真實值。最后,本實驗中并沒有考慮溫度對測試的影響,同樣會對結(jié)果產(chǎn)生干擾,這些都是之后需要繼續(xù)研究的。
[1]胡志偉.基于MTi的硅微系統(tǒng)初始對準技術研究[D].哈爾濱:哈爾濱工程大學,2009.
[2]王如勝.MEMS陀螺捷聯(lián)慣導系統(tǒng)標定方法研究[D].哈爾濱:哈爾濱工業(yè)大學,2015.
[3]韓盈黨.基于MEMS傳感器室內(nèi)導航的系統(tǒng)設計[D].西安:西安郵電大學,2014.
[4]Priyanka Aggarwal,Zainab Syed,Aboelmagd Noureldin. MEMS-Based Integrated Navigation[M].Boston:Artech House,2010.
[5]宋麗君,秦永元.MEMS加速度計的六位置測試法[J].測控技術,2009,(07):11-13,17.
[6]Kuznetsov A G,Galkin V I,Molchanov A V,et al. MEMS IMU:Development and flight test results[J].Gy?roscopy and Navigation,2012,3(4):255-264.
[7]Li Y,Niu X,Zhang Q,et al.An in situ hand calibration method using a pseudo-observation scheme for low-end inertial measurement units[J].Measurement Science and Technology,2012,23(10):104-105.
[8]嚴恭敏,秦永元.激光捷聯(lián)慣組的雙軸位置轉(zhuǎn)臺標定仿真[J].中國慣性技術學報,2007,15(1):123-127.
[9]徐冰華,楊孟興.激光陀螺IMU的不水平指北標定方法[J].壓電與聲光,2010(02):226-232.
[10]吉訓生,王壽榮.MEMS陀螺儀隨機漂移誤差研究[J].宇航學報,2006,27(4):640-642.
[11]劉百奇,房建成.光纖陀螺IMU的六位置旋轉(zhuǎn)現(xiàn)場標定新方法[J].光電工程,2008(01):61-65.
[12]劉海濤.MEMS陀螺儀隨機誤差的Allan分析[J].遙測遙控,2007,11(28):158-162.
[13]張紅良.陸用高精度激光陀螺捷聯(lián)慣導系統(tǒng)誤差參數(shù)估計方法研究[D].長沙:國防科技大學.2010.
[14]張金亮,秦永元,梅春波.基于MEMS慣性技術的鞋式個人導航系統(tǒng)[J].中國慣性技術學報,2011,(03):253-256.
[15]孫作雷,茅旭初,田蔚風,等.基于動作識別和步幅估計的步行者航位推算[J].上海交通大學學報,2008,(12):2002-2005+2009.
[16]張衛(wèi)東.激光陀螺捷聯(lián)慣導系統(tǒng)自動標定技術研究[D].長沙:國防科技大學.2000.
[17]代剛.MEMS_IMU誤差分析補償與實驗研究[D].北京:清華大學,2011.
[18]K I Lee,H Takao,K Sawada,et al.Analysis and experi?mental verification of thermal drift in a constant tempera?ture control type three-axis accelerometer for high tem?peratures with a novel composition of Wheatstone bridge[C]//Micro Electro Mechanical Systems:MEMS,2004:241-244.
[19]Z F Syed,P Aggarwal,C Goodall,et al.A new multi-position calibration method for MEMS inertial nav? igation systems[J].Meas.Sci.Technol.18(2007):1897-1907.
[20]Z F Syed,P Aggarwal,C Goodall,et al.A new multi-position calibration method for MEMS inertial nav?igation systems[J].Meas.Sci.Technol.18(2007):1897-1907.
Calibration Method of Low-precision MEMS in Personal Navigation System
LIANG PeileiXU JiangningCHENG Zhang(Department of Navigation,Naval University of Engineering,Wuhan430033)
On account of the problem that the error of personal shoes navigation using MEMS devices is biggish and directly af?fects the accuracy of personal navigation,this paper uses a twelve position calibration method.First the input and output error model of gyroscopes and accelerometers is established.Then the paper gives twelve positions calibration location layout.At last,through the experiment of the three-axis turntable the calibration results are obtained.The results show that the error of MEMS devices is re?duced after compensation and it could improve the accuracy of personal shoes navigation system.
personal navigation,micro inertial devices,calibration method
TN96
10.3969/j.issn.1672-9730.2017.08.011
2017年2月11日,
2017年3月23日
國家自然科學基金(編號:41574069;41404002);國家重大科學儀器開發(fā)專項(編號:2011yq12004502)資助。
梁佩雷,男,研究方向:慣性技術及應用。許江寧,男,博士生導師,研究方向:慣性技術及應用。程章,男,碩士研究生,研究方向:慣性技術及應用。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數(shù)學備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數(shù)學備考)(2020年9期)2021-01-04 00:25:14
中學生數(shù)理化·七年級數(shù)學人教版(2020年10期)2020-11-26 08:24:50
數(shù)學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
