SSAL算法優化的超聲波測距系統
2017-09-03 09:22:48時繼潮李新紅王雅涵吳佳齊呂閃
單片機與嵌入式系統應用 2017年8期
時繼潮,李新紅,王雅涵,吳佳齊,呂閃
(大連交通大學 電氣信息學院,大連 116028)
SSAL算法優化的超聲波測距系統
時繼潮,李新紅,王雅涵,吳佳齊,呂閃
(大連交通大學 電氣信息學院,大連 116028)
傳統的超聲波測距系統只是對系統進行簡單的濾波,即簡單地進行多次測量后取平均值,這樣難免會出現傳感器誤測的情況,導致最終的測量誤差很大,引發誤判。針對以上問題,本文對傳統的超聲波測量方法進行了改進,設計了基于SSAL算法的超聲波測距系統。實驗結果表明,經SSAL算法對返回的信號進行處理,大大減少誤判情況的發生,從而得到精確的返回數值,提高了測量精度。
濾波;超聲波測距;SSAL算法;精度
引 言
超聲波測距技術作為一種新型的非常有應用前景的技術,在各測試領域都將有無窮的發展空間,它將朝著測試更加靈敏、測量精度更高的方向發展,從而來滿足日益發展的社會需求。總的來說,由于超聲波的針對性強,耗能少且在介質中傳播速度快、距離遠,因此受到人們的廣泛關注,從而逐漸地被應用于各種介質中距離的測量。
但傳統的超聲波測距系統存在著一定的弊端,傳統超聲波測距系統僅是對返回來的信號進行簡單的濾波處理,即多次測量取平均值,這樣往往存在一定誤差,導致所測數據不精確。如超聲波在水位的測量過程中,發射信號很容易碰到水中一些體型比較大生物從而將采集到的不準確數據傳送給接收裝置,導致很大的誤差。本設計正是針對現有的一些系統存在的種種不足,將可將信號提取分離的SSAL算法運用到超聲波測距系統中,對所返回來的信號進行分離提取,從而得到精確的測量值。
本文在綜合研究各方面水位監測的實際情況及特點的基礎上,充分利用現代的電子技術,尤其是單片機技術和遠程控制技術,再加上提高精度減小誤差的SSAL算法,利用現在的方式及科學技能研制出一種通用性好、可靠性高、使用方便且可適用于多種監測環境的超聲波水位監測系統,具有非常重要的意義。
1 超聲波的測距原理
超聲波測距的原理實際上非常簡單,超聲波探頭發出超高頻的超聲波脈沖,其在傳播過程中遇到被測介質的表面便被反射回來,經反射回來的部分聲波被同一超聲波探頭接收,進而轉換成電信號。超聲波脈沖的傳播速度和聲音在真空中的傳播速度相同,從發射超聲波脈沖到接收到超聲波脈沖所需要的時間間隔與超聲波探頭發射的脈沖信號到被測介質表面的距離成正比。此距離的長度S與超聲波速度C和傳輸時間T之間的關系式為S=C×T/2,其傳輸原理結構框圖如圖1所示。
2 系統結構
控制系統主要由4大部分構成,分別為啟動選擇電路、超聲波傳感器采集電路、液晶顯示電路和按鍵設置電
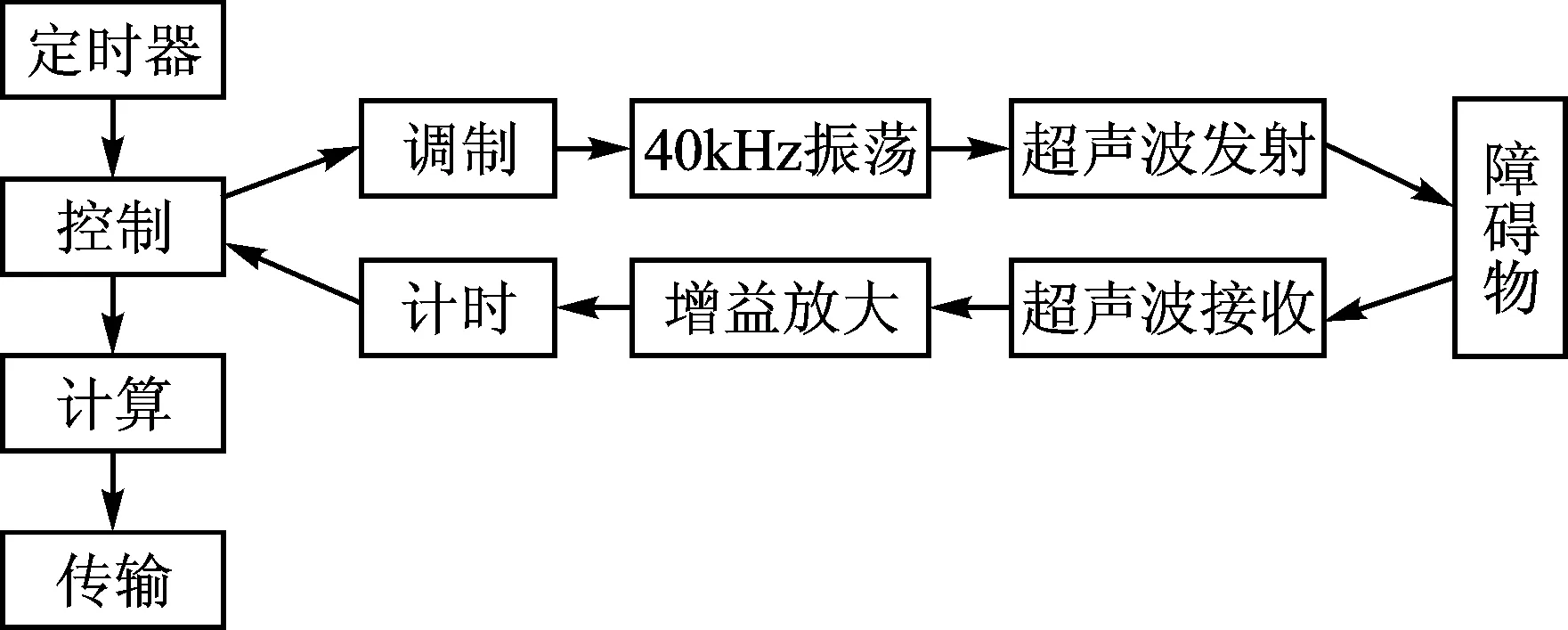
圖1 超聲波傳輸原理框圖
路。其電路原理圖如圖2所示。
由系統的電路原理圖可知,超聲波測距系統由主控芯片STM32103R8T6進行控制,通過SSAL算法對超聲波傳感器采集到的信息進行處理后,由液晶屏進行顯示,最終通過比對分析,求平均數得出最終的測量值,大大地提高了測量精度。
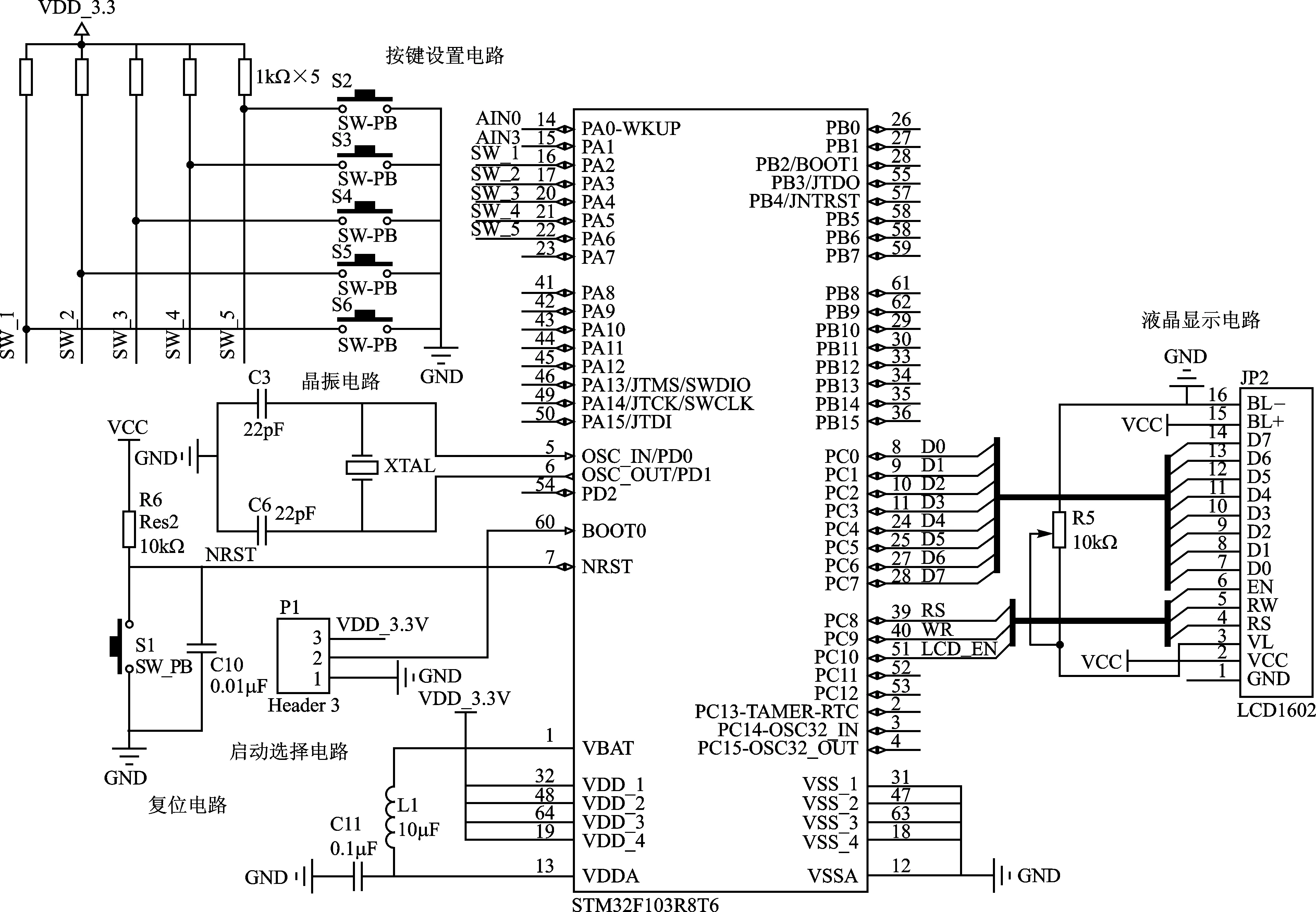
圖2 系統電路原理圖
3 SSAL算法的原理
SSAL算法主要對空間信號進行分離,從而使設備更容易接收到被測信號。假設有N元的均勻線陣,信號的工作波長為r,各陣元之間的距離為L。其中共有Q個空間信號源,且各信號源之間不相關,各陣元的噪聲為Nh(t),h=1,2,…,噪聲和信號為Sc(t),c=1,2,…,其中N和Q都不相關[1]。因此,第h個陣元的輸出為:
(1)

(2)
式中:
(3)
(4)
(5)
(6)
(7)
假設相關矩陣為R,通過求各陣元輸出的相關矩陣,得到:
(8)
通過對相關矩陣R進行特征分解,其各特征值及對應的特征向量分別為:r1,r2,…,rQ,rQ+1,…,rN以及V1,V2,…,VQ,VQ+1,…,VN。
各特征向量相互正交且為矩陣R列空間的基,由于最小特征值來源于噪聲,因此與最小特征值對應的特征向量所構成的子空間稱為噪聲子空間,記為D,矩陣R的列空間被劃分成信號子空間S和噪聲子空間D[3]。
(9)
(10)
又因為各特征向量相互正交,所以有:

(11)
特征向量與信號源所在的方向相同,Q均處于信號子空間S中,故可以構造矩陣:
(12)
顯然有:
(13)
SSAL算法就是根據式 (13) 來求空間譜P,有:
(14)
譜峰所對應的δ值就是在信號源方向上的估值,其大小與信號的強度無關,所反映的只是信號矢量D(δ)和噪聲子空間D的正交性[4]。
4 SSAL算法在超聲波測距中的應用
SSAL算法主要對超聲波反射回來的信號進行分離提取,可根據自己的需求提取出相應方位的信號,然后通過相應三角變換計算出實際的距離。在測量水位高度時,為了使測得的數值更加精確,可對與垂直方向左右兩端分別呈一定角度的信號進行提取,然后計算出這兩個方位的直線距離,最后通過相應的三角變換計算出垂直距離,通過分析比較,最終確定其垂直距離。
這樣不僅減少了聲波碰到其他物體造成誤判事件的發生,而且還可以通過對多方位數值的比較來提高測量的精度。
將SSAL算法嵌入到應用程序中,通過MATLAB軟件對返回信號中垂直方向左右兩端分別呈50°和150°方向的信號進行提取,提取后的波形如圖3所示。
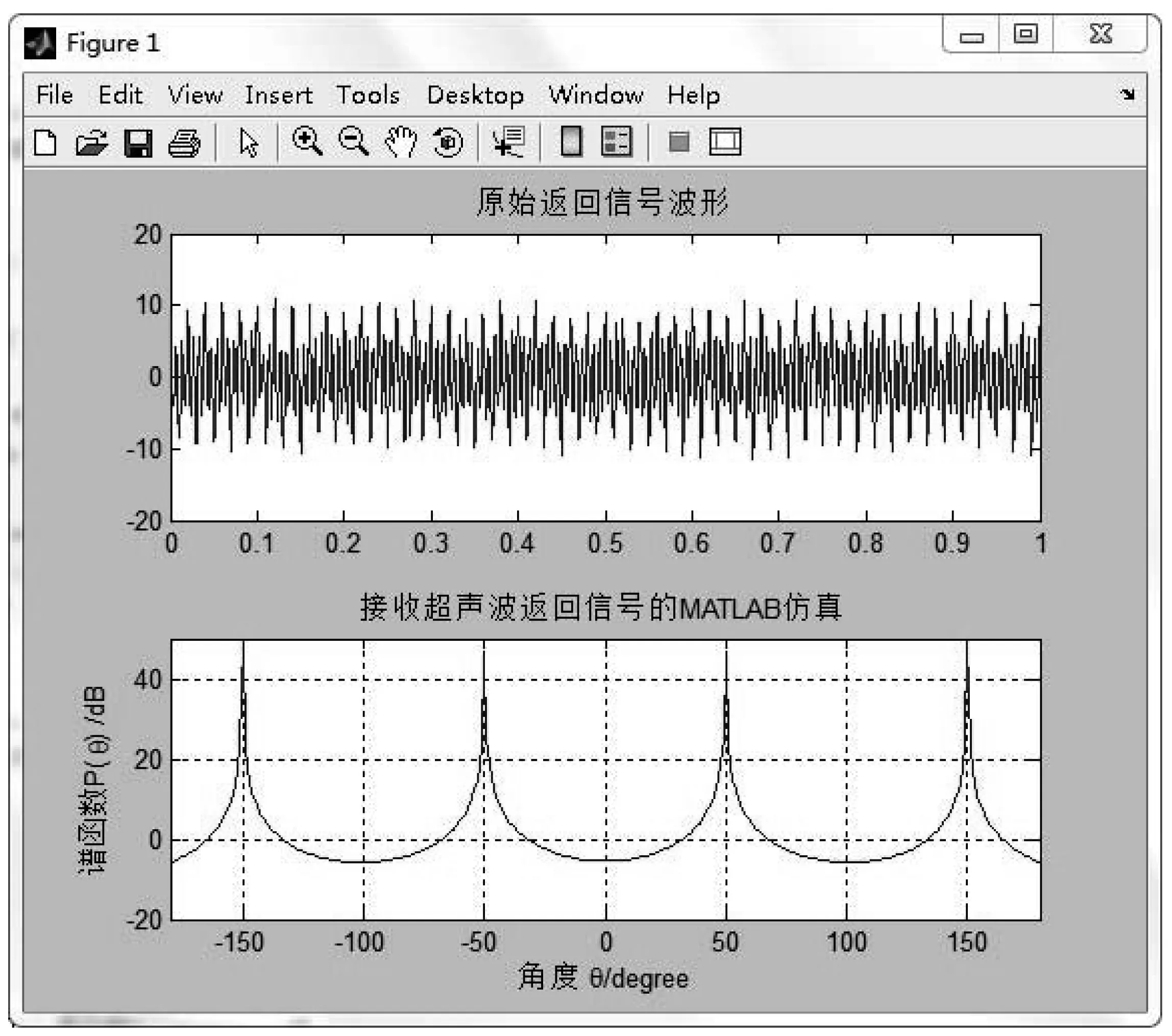
圖3 接收超聲波返回信號的Matlab仿真
由圖3可以看出,通過SSAL算法最終將所反射回來信號中與垂直方位左右分別成50°和150°的4個信號提取出來,然后根據信號的接收時間通過公式S=C×T/2分別將4個方位的實際距離計算出來,根據三角公式L=S×cosθ,將4個方位的L值計算出來,最后進行比較分析。
已知超聲波在水中的轉播速度大約為1 500m/s,即C=1 500 m/s,從發射超聲波到接收到4個方位的超聲波信號所用的時間分別為T1、T2、T3、T4。經驗證得知,接收到+50°方位的信號時間T1=1.376 s,接收到-50°方位的信號時間T2=1.380 s,接收到+150°方位的信號時間T3=1.90 s,接收到-150°方位的信號時間T4=0.642 s,設根據公式S=C×T/2計算出這4個方位的距離分別為S1、S2、S3、S4,根據公式L=S×cosθ計算出這4個方位的垂直距離分別為L1、L2、L3、L4,由以上數據得到表1。
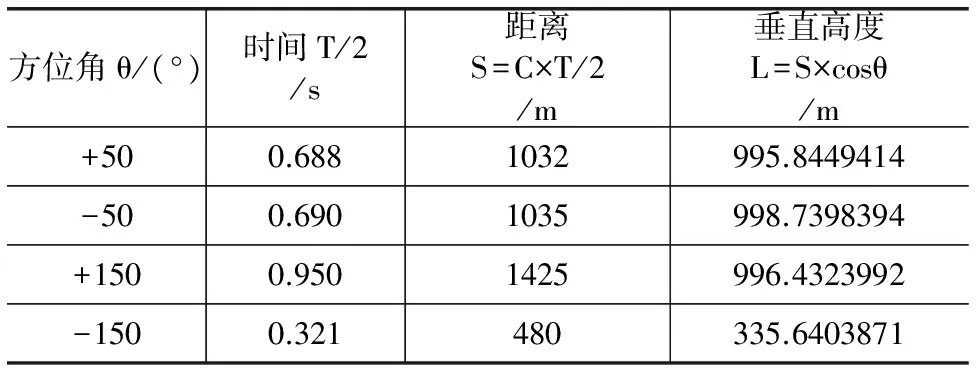
表1 超聲波測距數據表
從表1中可以明顯看出,L4明顯小于其他測量值,這時就可以將L4定為錯誤測量值,因為其很可能是因為超聲波碰到水中其他物體反射回來的信號,不是由水底直接反射回來的信號,所以將L4舍去,再對其他三個計算出來的垂直距離取平均值,得到最終的水位高度為:

用戶還可以根據自己的需求實現對任意方位信號的提取,為了使所測得的數據更加精確,可以應用SSAL算法對盡可能多個方位的信號進行提取,最后分析比較求平均,得到更加精確的測量值。
5 系統的軟件設計
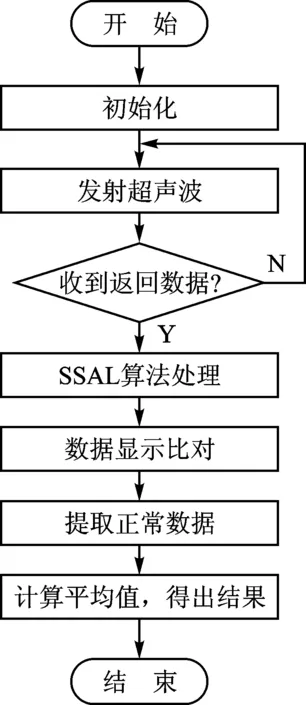
圖4 系統軟件設計流程圖
在軟件設計方面,先對系統進行初始化處理,然后超聲波系統發射超聲波,隨后系統會檢查是否有超聲波返回。如果沒有返回超聲波信號,系統會立即再次發送超聲波;如果檢測到有信號返回,則用SSAL算法對返回信號進行處理,通過相應計算后將返回信號的時間及方位在液晶屏上顯示出來。
因此可以根據實際情況,對液晶屏顯示的數據進行分析對比,忽略其中誤差比較大的數據,對剩下的數據取平均值得到最終的測量數值。
系統的軟件設計流程圖如圖4所示。
結 語
本文主要設計了基于SSAL算法的超聲波測距系統,解決了傳統測距系統中進行簡單濾波從而導致誤差大的問題。應用SSAL算法,可以根據自己的需要,將返回信號中任意方位的信號提取出來,然后通過計算整理求平均得到最終的數值,實現了對測量目標高效、快速、精確的測量。與普通的超聲波測量技術相比,具有低

[1] 周小軍, 郭玉霞, 王凌強,等. 基于MUSIC算法的DOA估計性能仿真分析[J]. 蘭州工業學院學報,2015,22(4):47-51.
[2] 張守宏.一種改進的空間平滑算法[J]. 電子與信息學報, 2008, 30(4):859-862.
[3] 王布宏,王永良,陳輝.相干信源波達方向估計的加權空間平滑算法[J].通信學報,2003,24(4):31-40.
[4] 李國民,龔星宇,郭雯.MUSIC算法估計性能分析[J].現代電子技術, 2008(3).
[5]HirataA,MorimotoT,KawasakiZ.DOAEstimationofUltra-widebandEMWaveswithMUSICandInterferometry[J].AnIEEE2.An-tennasandWirelessPropagationLetters, 2003, 2(1):190-193.
時繼潮(碩士研究生)主要研究方向為嵌入式系統、無線通信等。
Ultrasonic Distance Measurement System Based on SSAL Algorithm Optimize
Shi Jichao,Li Xinhong,Wang Yahan,Wu Jiaqi,Lv Shan
(College of Electrical and Information,Dalian University of Traffic,Dalian 116028,China)
The traditional ultrasonic ranging system only simply filter the system,which simply takes the average after multiple measurements.This approach will occur sensor error situation and result in large final measurement error,thus triggers a false judgment.Aiming at the above problems,the traditional ultrasonic measurement method is improved and an ultrasonic ranging system based on SSAL algorithm is designed in this paper.The experiment results show that the probability of wrong judgment is greatly reduced after the return signal is handled by SSAL algorithm,and it can get exactly return values.It is greatly improve the accuracy of the measurement.
wave filtering;ultrasonic distance measurement;the algorithm of SSAL;accuracy
TP312
A
?迪娜
2017-04-05)
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
電子制作(2018年11期)2018-08-04 03:25:42
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
家庭影院技術(2017年9期)2017-09-26 03:41:45
