基于LADRC的A3000過程控制實驗系統(tǒng)探究
2017-09-03 06:08:11周宣征張公永
實驗室研究與探索 2017年8期
周宣征, 張公永
(濱州學(xué)院 電氣工程系,山東 濱州 256600)
基于LADRC的A3000過程控制實驗系統(tǒng)探究
周宣征, 張公永
(濱州學(xué)院 電氣工程系,山東 濱州 256600)

利用LADRC對A3000過程控制系統(tǒng)進行改造,運用實驗計算出被控對象數(shù)學(xué)模型,設(shè)計自抗擾控制系統(tǒng),進而按照A3000控制系統(tǒng)實際參數(shù)搭建仿真模型,求取控制參數(shù),實驗結(jié)果驗證了對實驗系統(tǒng)改造的可行性,該次實驗設(shè)備的改造適應(yīng)了工業(yè)控制技術(shù)的發(fā)展對高校實驗教學(xué)的新要求,促進了過程控制實驗項目的開放性、創(chuàng)新性,教學(xué)模式的改革,有利于我校創(chuàng)新型與應(yīng)用型人才的培養(yǎng),節(jié)約了高校實驗設(shè)備更新成本,為我校實驗設(shè)備更新提出新思路。
線性自抗擾控制; 過程控制實驗系統(tǒng); 改造研究
0 引 言
工業(yè)過程控制與自動化儀表實驗是電氣工程及自動化專業(yè)的專業(yè)核心課程,在培養(yǎng)應(yīng)用型人才方面起著非常重要作用[1-2]。作為專業(yè)核心實驗課程,需要有部分開放性、研究性實驗,另外隨著工業(yè)控制技術(shù)的發(fā)展,作為控制核心課程的實驗教學(xué)設(shè)備亟需更新創(chuàng)新[3-5]。基于以上理念,本文通過自抗擾控制技術(shù)對過程控制實驗的A3000控制系統(tǒng)進行改造,為實驗項目的開放性、創(chuàng)新性,教學(xué)模式的改革提供了有利條件,節(jié)約了我校實驗設(shè)備更新成本。
ADRC(自抗擾控制)技術(shù)是適應(yīng)數(shù)字控制時代潮流、吸收現(xiàn)代控制理論成果、發(fā)揚并豐富PID思想精髓(“基于誤差消除誤差”)、開發(fā)運用特殊非線性效應(yīng)來發(fā)展的新型實用技術(shù)。自抗擾控制技術(shù)的核心是把系統(tǒng)的未建模動態(tài)和未知外擾作用都當(dāng)作對系統(tǒng)的“總擾動”,并對它們進行估計并給予補償。其優(yōu)點在于對系統(tǒng)內(nèi)、外擾的魯棒性好,動態(tài)響應(yīng)快且無超調(diào),具有較高的使用推廣價值。美國克利夫蘭州大學(xué)的高志強教授對ADRC進行多年研究,指出了正常運行時,ADRC基本運行在線性區(qū),提出了線性自抗擾控制技術(shù)LADRC(Linear Auto Disturbance Rejection Control technique),簡化了參數(shù)整定,應(yīng)用性較強[6-11]。
A3000控制系統(tǒng)包括A3000現(xiàn)場系統(tǒng),控制柜,上位機組成,其中現(xiàn)場系統(tǒng)包括3個水箱,1個鍋爐,1個強制換熱器,2個水泵,2個流量計,1個電動調(diào)節(jié)閥。其他還包括加熱管,大水箱,如圖1所示。 A3000控制系統(tǒng)(A3000-CS)包括了傳感器執(zhí)行器I/O連接板、3個可換的子控制系統(tǒng)板,第三方控制系統(tǒng)接口板,上位機主要裝有組態(tài)王。
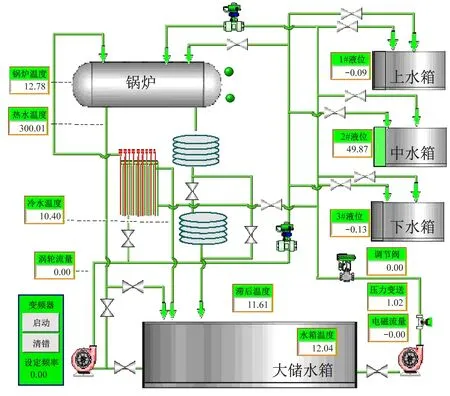
圖1 A3000現(xiàn)場系統(tǒng)結(jié)構(gòu)圖
1 實驗系統(tǒng)的改造方法與步驟
(1) 通過實驗的方法獲取被控對象的傳遞函數(shù)。
(2) 自抗擾控制系統(tǒng)設(shè)計。
(3) 根據(jù)自抗擾原理及自抗擾控制器的數(shù)學(xué)模型,搭建simulink仿真模型。
(4) 通過仿真驗證,獲取控制器的控制參數(shù)。
(5) ADAM-5510EKW/TP控制器調(diào)試。
2 被控過程傳遞函數(shù)求取
通過對下水箱做階躍響應(yīng)實驗,記錄階躍響應(yīng)曲線,根據(jù)數(shù)學(xué)模型結(jié)構(gòu),處理階躍響應(yīng)曲線數(shù)據(jù),得出模型參數(shù)[12-13]。
設(shè)定調(diào)節(jié)閥的開度為u,水箱的液位高度為h,根據(jù)動態(tài)平衡關(guān)系,并進行拉式變換后,可以得到被控過程的傳遞函數(shù)為

(1)
通過上位機組態(tài)王軟件設(shè)置電動調(diào)節(jié)閥的開度35%,固定水箱擋板的位置不變,上電后待水箱里面的水位穩(wěn)定后記錄相應(yīng)的液位高度與穩(wěn)定時間,響應(yīng)曲線如圖2所示。其中PV代表液位高度h。

圖2 響應(yīng)曲線圖
由h(s)反拉式變換知,h(T)=0.632h(∞),由圖得T=1 s,故

3 自抗擾控制系統(tǒng)設(shè)計
根據(jù)上述所求傳遞函數(shù)及存在擾動情況下,被控對象的微分方程為:

(3)

(4)
構(gòu)造系統(tǒng)結(jié)構(gòu)如圖3所示,主要由被控對象,擴張狀態(tài)觀測器(ESO),KP環(huán)節(jié)及b環(huán)節(jié)構(gòu)成。

圖3 LADRC系統(tǒng)圖
上式中,令式(3)、(4)x1=y,x2=f,由式(3)得:
對象的輸入輸入輸出關(guān)系方程:
(5)
觀測器的方程為:
(6)
觀測器利用對象輸入輸出的數(shù)據(jù)估計出對象的狀態(tài)方程為:
(7)

(8)
(9)
系數(shù)矩陣為:
參數(shù)l1、l2通過系數(shù)矩陣A的特征根求得:

4 仿真分析
根據(jù)上述原理,建立自抗擾控制系統(tǒng)的仿真模型,如圖4仿真模型所示,擾動信號模擬水泵1的流量,設(shè)置wo=40,wc=150,其他參數(shù)依據(jù)A3000控制系統(tǒng)的實際參數(shù)設(shè)置。仿真結(jié)果圖5中y為系統(tǒng)輸出,yhat為擴張狀態(tài)觀測器對輸出的估計量,target為系統(tǒng)理想輸出值,圖6中為擾動信號及擴張狀態(tài)觀測器對擾動信號的估計量。從仿真結(jié)果可以得到如下結(jié)論。
(1) 圖5仿真結(jié)果可以看到系統(tǒng)的輸出值存在較高的動態(tài)性能和準(zhǔn)確性,只是在擾動出現(xiàn)的瞬間存在超調(diào),大約持續(xù)0.2s時間,系統(tǒng)輸出趨于穩(wěn)定,也說明LADRC技術(shù)可以很好對擾動給與補償,消除擾動。
(2) 從圖5中yhat及y的曲線與圖6擾動及擾動估計曲線可看出,擴張狀態(tài)觀測器能夠較好對系統(tǒng)輸出與擾動進行觀測,為控制器對擾動信號進行補償提供有利條件。

圖4 仿真模型

圖5 系統(tǒng)仿真結(jié)果1

圖6 仿真結(jié)果2(f及f估計)
5 實驗驗證
通過對ADAM-5510EKW/TP控制器編程并與組態(tài)王連接,實驗結(jié)果如圖7所示,其中SP為設(shè)定值,

圖7 實驗結(jié)果
PV為液位值,實驗結(jié)果具有良好的動態(tài)性能,體現(xiàn)出對設(shè)備改造的可行性與有效性。
6 結(jié) 語
利用LADRC技術(shù)對A3000過程控制系統(tǒng)進行改造研究,通過仿真與實驗分析具有良好的實驗效果。該實驗設(shè)備的改革適應(yīng)了高校實驗教學(xué)對工業(yè)控制技術(shù)對新技術(shù)發(fā)展的要求,促進了過程控制實驗項目的開放性、創(chuàng)新性,教學(xué)模式的改革,有利于我校創(chuàng)新型與應(yīng)用型人才的培養(yǎng),節(jié)約了高校實驗設(shè)備更新成本,為我校實驗設(shè)備更新提出新思路。
[1] 王曉芳,孫旭東,張繼研.過程控制工程實驗項目開發(fā)與教學(xué)改革探討[J].實驗室科學(xué),2013,16(5):79-84.
[2] 李 敏. 真實模型Matlab仿真的過程控制系統(tǒng)實驗研究[J]. 浙江工業(yè)大學(xué)學(xué)報,2011, 39(2):168-173.
[3] 王 娟,鐘 秦,懂 旭.A3000系統(tǒng)在化工自動化及儀表實驗中的應(yīng)用[J].實驗室研究與探索,2006,25(9):1079-1080.
[4] 賈鴻莉,劉 強,董德發(fā),等.A3000過程控制實驗系統(tǒng)開發(fā)-多容液位PID控制系統(tǒng)[J].現(xiàn)代電子技術(shù),2006,17:208-210.
[5] 王銀鎖,張德泉,李紅萍.A3000液位控制系統(tǒng)的設(shè)計[J].工業(yè)儀表與自動化裝置,2011(4):61-63.
[6] 周宣征,張寶國. 自抗擾控制器的參數(shù)整定研究[J]. 電氣自動化,2014,36(2):23-24.
[7] 周雪松,田程文,馬幼捷. 基于LADRC的SHAPF模型及其電流跟蹤控制策略[J]. 電力自動化設(shè)備,2013,33(4):49-54.
[8] Gao zhiqiang. Scaling and bandwidth parameterization based controller tuning[C]∥Proceedings of the 2003 American Control Conference.USA:2003:4989-4996.
[9] 韓京清.自抗擾控制技術(shù)—估計補償不確定因素的控制技術(shù)[M].北京:國防工業(yè)出版社,2008.
[10] 王 琳,張根寶.自抗擾控制器在雙容水箱中的應(yīng)用[J].計算機測量與控制,2013,21(3):775-778.
[11] 韓京清.從PID技術(shù)到“自抗擾控制技術(shù)”[J].控制工程,2002,9(3):13-18.
[12] 郭 嬋.A3000過程控制實驗仿真系統(tǒng)的開發(fā)[D].青島:中國石油大學(xué)(華東),2008.
[13] 李 軍.A3000系統(tǒng)的云模型控制[D].鎮(zhèn)江:江蘇科技大學(xué),2013.
The Research on A3000 Process Control Experimental System Based on LADRC
ZHOU Xuanzheng, ZHANG Gongyong
(Department of Electrical Engineering, Binzhou University, Binzhou 256600, Shandong, China)
The LADRC is used to modify the A3000 process control system. Mathematical model of the object is calculated by experiments. An ADRC system is designed, simulation model is built according to the actual A3000 control system parameters, and these control parameters are calculated. Experimental results show the feasibility of the modification experiment system. The experimental equipment reformation is to fit the new requirements of experimental teaching in university and the development of industrial control technology, and promotes the openness and innovativeness process control experiment reform of teaching mode. It is beneficial to cultivate creative and applied talents in our school, saves the cost of updating the experimental equipment at university, and puts forward new ideas for updating experimental equipment.
linear auto disturbance rejection control technique(LADRC); process control experimental system; modification research
2016-11-28
國家安監(jiān)局2015年重大事故防治關(guān)鍵技術(shù)科研項目(shandong-0056-2015AQ);濱州學(xué)院青年教師創(chuàng)新項目(BZXYQNLG2011)
周宣征(1982-),男,山東濱州人,碩士,講師,研究方向為電力電子和電力系統(tǒng)自動化。
Tel.:15169979606;E-mail:tjlgaoyun@163.com
TP 301
A
1006-7167(2017)08-0052-03
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
小哥白尼(趣味科學(xué))(2019年6期)2019-10-10 01:01:50
建材發(fā)展導(dǎo)向(2019年13期)2019-08-24 06:37:40
電子制作(2019年7期)2019-04-25 13:16:50
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
發(fā)明與創(chuàng)新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55