三維激光掃描在軌道交通高架段竣工測量中的應(yīng)用
2017-09-03 11:01:01劉炫顧波
城市勘測 2017年4期
劉炫,顧波
(1.寧波市測繪設(shè)計(jì)研究院,浙江 寧波 315800; 2.寧波市阿拉圖數(shù)字科技中心,浙江 寧波 315800)
三維激光掃描在軌道交通高架段竣工測量中的應(yīng)用
劉炫1*,顧波2
(1.寧波市測繪設(shè)計(jì)研究院,浙江 寧波 315800; 2.寧波市阿拉圖數(shù)字科技中心,浙江 寧波 315800)
介紹三維激光掃描技術(shù)在城市軌道交通高架段竣工測量中的數(shù)據(jù)采集流程,并對(duì)數(shù)據(jù)進(jìn)行去噪濾波,配準(zhǔn)拼接等操作,獲得高架段的點(diǎn)云模型,提取縱橫斷面數(shù)據(jù),驗(yàn)證了三維激光掃描技術(shù)在軌道交通高架段竣工中應(yīng)用的可行性。
三維激光掃描;軌道交通;竣工測量;縱橫斷面;點(diǎn)云數(shù)據(jù)
1 引 言
軌道交通作為公共交通在城市中出現(xiàn)已經(jīng)很久了,并且在城市的發(fā)展中起著越來越重要的作用。經(jīng)濟(jì)發(fā)達(dá)地區(qū)的交通發(fā)展史告訴我們,只有采用客運(yùn)量大的城市軌道交通系統(tǒng),才能從根本上改善城市公共交通狀況,并且能夠提升城市形象,改善居民出行條件,提升土地價(jià)值,使城市發(fā)展進(jìn)入良性軌道。
三維激光掃描技術(shù)可以在不接觸目標(biāo)地物的條件下,直接采集物體表面的三維數(shù)據(jù),并且具有極高的采樣率和測量精度。利用獲取的海量點(diǎn)云數(shù)據(jù),可快速構(gòu)建掃描對(duì)象的三維模型,真實(shí)還原現(xiàn)實(shí)環(huán)境,展現(xiàn)目標(biāo)地物的細(xì)節(jié)特征。在缺失照明的夜間,也能順利采集數(shù)據(jù),一定程度上減少了人流和車流的干擾,不僅能夠提升作業(yè)安全,也能提高作業(yè)的效率。
軌道交通高架段按照城市規(guī)劃管理部門的要求,需要對(duì)其進(jìn)行竣工測量,但是高架段僅有墩柱部分可以采用全站儀觀測,即便使用具有免棱鏡功能的全站儀也只能獲得個(gè)別特征點(diǎn)位,作業(yè)效率低。因此在本項(xiàng)目中采用RIEGL VZ-400三維激光掃描儀采集高架段點(diǎn)云數(shù)據(jù),以此完成規(guī)劃測量要求的相關(guān)內(nèi)容。
2 項(xiàng)目介紹
寧波軌道交通1號(hào)線二期工程西自東環(huán)南路站東至霞浦站,實(shí)現(xiàn)北侖區(qū)與中心城區(qū)的同城效應(yīng),有效提高城市區(qū)域公共交通的一體化服務(wù)水平。線路穿越了鄞州東部及北侖區(qū),全長約 25.3 km,設(shè)車站9座,其中地下站1座,高架站8座,其中北侖段均為地上高架,如圖1所示。
按照《寧波市城鄉(xiāng)規(guī)劃測量管理技術(shù)規(guī)定》(2009)要求,竣工成圖比例尺為1∶500,建(構(gòu))筑物的明顯細(xì)部點(diǎn)按一類地物點(diǎn)(點(diǎn)位中誤差為 5 cm)精度測量。竣工測繪的主要工作有:高架段線路及沿線地形測量、區(qū)間縱橫斷面測量、站點(diǎn)及附屬建筑測量及面積核實(shí)。

圖1 寧波軌道交通1號(hào)線二期高架段線路(部分)示意圖
3 項(xiàng)目實(shí)施
3.1 控制測量
為滿足竣工測量的精度要求,以《衛(wèi)星定位城市測量技術(shù)規(guī)范》 CJJ/T 73-2010和《工程測量規(guī)范》 GB 50026-2007為控制測量依據(jù),為保證后期點(diǎn)云數(shù)據(jù)的拼接精度,采用NBCORS網(wǎng)絡(luò)RTK測量技術(shù)在線路沿線布設(shè)圖根點(diǎn),并與周邊已有城市一級(jí)控制點(diǎn)聯(lián)測五等水準(zhǔn)線路。
3.2 點(diǎn)云數(shù)據(jù)采集
經(jīng)過現(xiàn)場踏勘,軌道交通高架段兩側(cè)部分為城市主次干道,白天車流量較大,不利于工作展開,為了提高外業(yè)數(shù)據(jù)采集效率和減少不必要的噪聲,將測量工作安排在夜間。
本項(xiàng)目采用的三維激光掃描儀型號(hào)為RIEGL VZ-400,掃描距離 500 m,掃描精度 2 mm(100 m)。由于項(xiàng)目路線較長,測站較多,采用絕對(duì)定向模式進(jìn)行掃描操作,直接將儀器和靶標(biāo)架設(shè)在圖根上,并設(shè)置相應(yīng)掃描參數(shù),采用精掃模式對(duì)目標(biāo)物進(jìn)行掃描。
3.3 掃描數(shù)據(jù)處理
(1)點(diǎn)云去噪和濾波
三維激光掃描技術(shù)采集的點(diǎn)云數(shù)據(jù)量巨大,由于測量中儀器的震蕩、車輛的往來、灌木的遮擋、玻璃的透射等各種因素,掃描獲得的點(diǎn)云數(shù)據(jù)必然存在噪聲點(diǎn),明顯粗差數(shù)據(jù)可以手動(dòng)去除,其他噪聲數(shù)據(jù)可以使用RIEGL VZ-400自帶數(shù)據(jù)處理軟件RiSCAN PRO去除。
(2)點(diǎn)云配準(zhǔn)
三維激光掃描技術(shù)對(duì)建筑進(jìn)行點(diǎn)云數(shù)據(jù)采集,由于儀器視角和環(huán)境限制,通常需要多次設(shè)站才能完成整體的掃描工作,將不同測站的坐標(biāo)轉(zhuǎn)換到統(tǒng)一坐標(biāo)系中,就需要進(jìn)行點(diǎn)云配準(zhǔn)。
針對(duì)本項(xiàng)目采用的絕對(duì)定向模式,在后處理軟件Registration模塊中輸入設(shè)站點(diǎn)坐標(biāo)和定向靶標(biāo)點(diǎn)坐標(biāo),使用后視定向配準(zhǔn)模塊逐站進(jìn)行精確配準(zhǔn),并將配準(zhǔn)誤差控制在 0.02 m以下,從而獲得整個(gè)建筑的點(diǎn)云數(shù)據(jù)模型,如圖2所示。
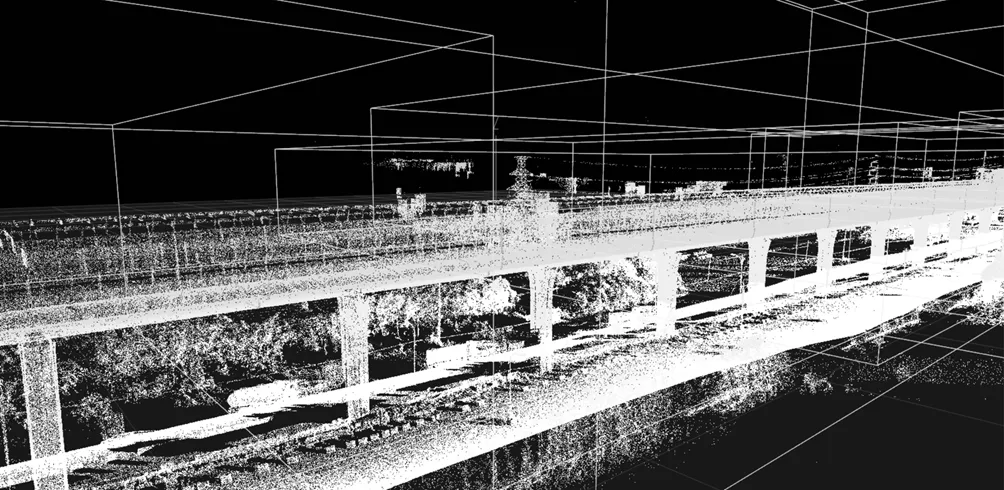
圖2 寧波軌道交通1號(hào)線二期高架段線路(部分)點(diǎn)云模型圖
3.4 縱橫斷面繪制
按照站點(diǎn)將線路分為不同的區(qū)段,利用寧波市測繪設(shè)計(jì)研究院自行開發(fā)的點(diǎn)云處理軟件——阿拉輕云,按照預(yù)定的切片厚度,逐段提取縱斷面點(diǎn)云和橫斷面點(diǎn)云。根據(jù)點(diǎn)云數(shù)據(jù),在CAD中繪制斷面圖,相應(yīng)特征高程標(biāo)注則直接采用點(diǎn)云模型中的高程值,如圖3所示。

圖3 高架段線路橫斷面(部分)點(diǎn)云數(shù)據(jù)圖
3.5 沿線地形圖繪制
利用獲取的點(diǎn)云模型,提取站點(diǎn)外輪廓線、高架輕軌外側(cè)邊線、高架墩柱、地面道路邊線路燈、消火栓、窨井等,繪制線路附近的 1∶500數(shù)字地形圖。由于地面起伏較小,不再另行構(gòu)造TIN三角網(wǎng)模型,直接采集地面標(biāo)高點(diǎn)體現(xiàn)地貌特征。
3.6 站點(diǎn)及附屬用房面積測量
(1)切片提取輪廓線
設(shè)計(jì)合適的切片厚度,根據(jù)不同的樓層高度,進(jìn)行水平面雙切片處理(樓層底板面和該層 2.20 m處),根據(jù)切片獲得點(diǎn)云在CAD中繪制樓層輪廓線。
(2)面積計(jì)算
由(1)中的樓層輪廓線疊加,重疊區(qū)域即為實(shí)測建筑邊線,與現(xiàn)場實(shí)量的建筑尺寸核實(shí)校對(duì),利用校對(duì)后的建筑邊線計(jì)算建筑面積。
4 成果檢驗(yàn)
按照《測繪成果質(zhì)量檢查與驗(yàn)收》GB/T 24356-2009開展檢查驗(yàn)收工作,采用全站儀設(shè)站檢測的方法,對(duì)項(xiàng)目成圖中的特征點(diǎn)和建筑高度重復(fù)打點(diǎn),并根據(jù)檢測數(shù)據(jù)統(tǒng)計(jì)中誤差,如表1所示。
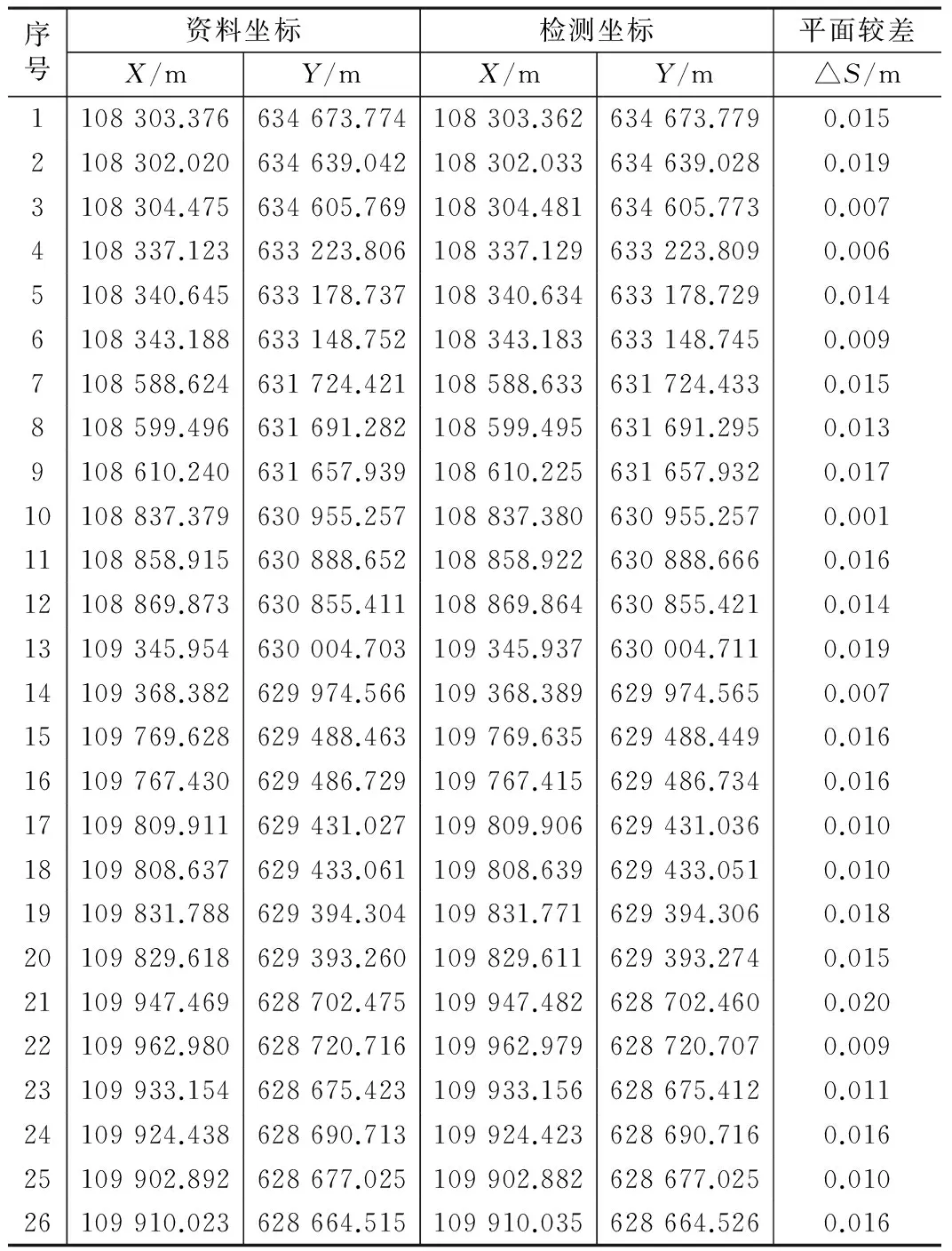
規(guī)劃竣工測量檢查統(tǒng)計(jì)表(特征點(diǎn))(部分) 表1
野外實(shí)地檢查特征點(diǎn)點(diǎn)位56個(gè),特征點(diǎn)抽查比例為16.0%,統(tǒng)計(jì)后平面中誤差為 0.014 m,符合規(guī)劃竣工測量要求,如表2所示。
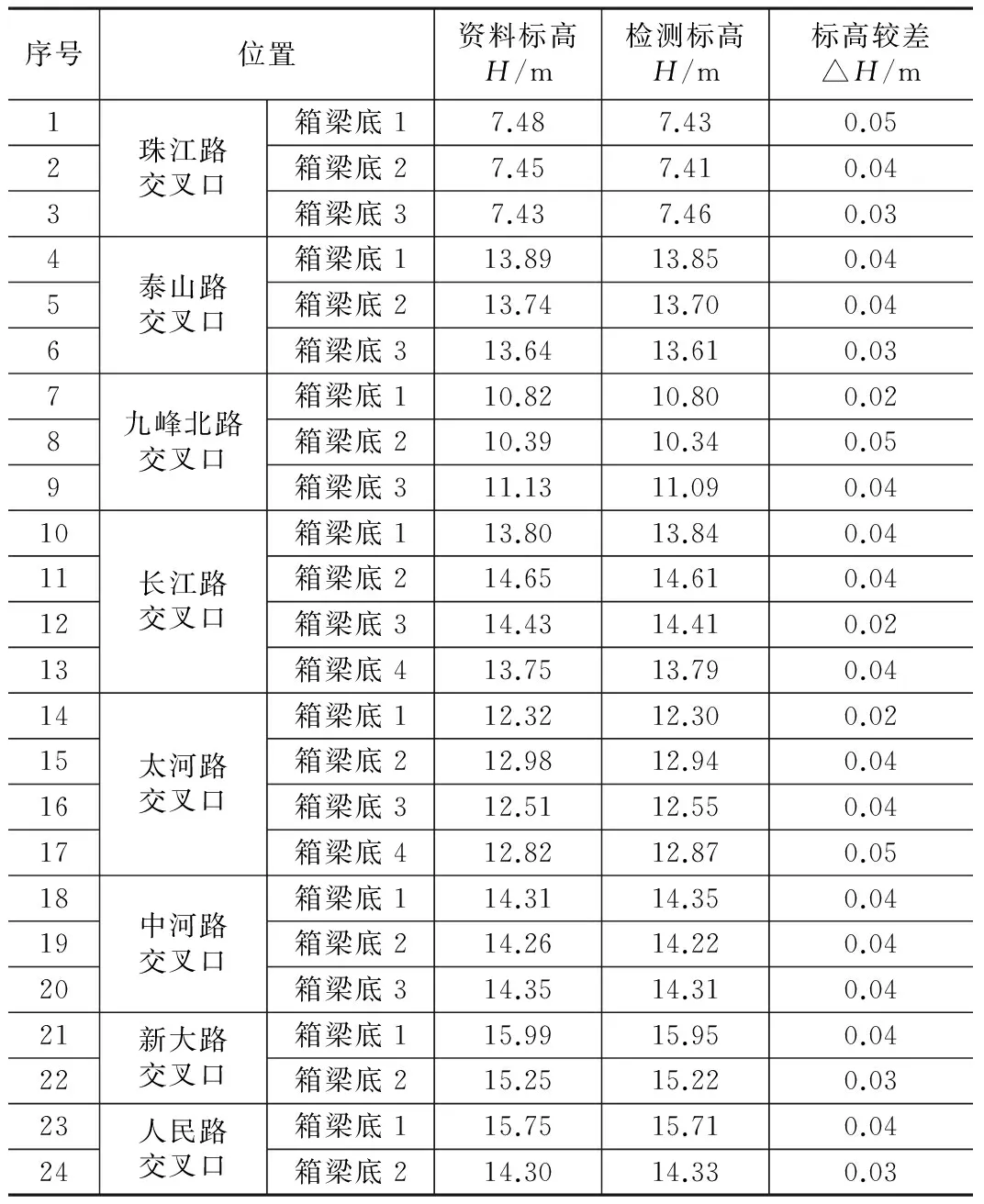
規(guī)劃竣工測量檢查統(tǒng)計(jì)表(建筑高度) 表2
野外實(shí)地檢查建筑高度點(diǎn)位24個(gè),特征點(diǎn)抽查比例為27.3%,統(tǒng)計(jì)后高程中誤差為 0.035 m,符合規(guī)劃竣工測量要求。
規(guī)劃測量管理部門通過對(duì)該項(xiàng)目的作業(yè)流程,精度控制等各方面的驗(yàn)收,確定該項(xiàng)目成果可靠,可以根據(jù)此報(bào)告數(shù)據(jù)展開下一步的規(guī)劃驗(yàn)收工作。
5 總 結(jié)
在城市軌道交通高架段的測量中應(yīng)用三維激光掃描技術(shù),并且經(jīng)檢核最終成果滿足竣工測量的精度要求,驗(yàn)證了該技術(shù)在城市高架竣工測量中的可行性。對(duì)比傳統(tǒng)全站儀單點(diǎn)采集的作業(yè)模式,三維激光掃描技術(shù)通過外業(yè)復(fù)制三維場景和內(nèi)業(yè)數(shù)據(jù)采集和編輯的作業(yè)方法,具有效率高,精度高,作業(yè)更安全的特點(diǎn)。但是在該項(xiàng)目的作業(yè)過程中也發(fā)現(xiàn)該技術(shù)的不足之處:數(shù)據(jù)量過大,計(jì)算機(jī)配置要求高;數(shù)據(jù)后處理過程復(fù)雜,人員培訓(xùn)要求高;過往車輛及樹木等遮蔽,容易形成點(diǎn)云漏洞;高架頂部點(diǎn)云密度不足,需引入其他測量方式彌補(bǔ)。
[1] 馬立廣. 地面三維激光掃描測量技術(shù)研究[D]. 武漢:武漢大學(xué),2005.
[2] 邢漢發(fā),高志國,呂磊. 三維激光掃描技術(shù)在城市建筑竣工測量中的應(yīng)用[J]. 工程勘察,2014(1):94~97.
[3] 馬利,謝孔振,白文斌等. 地面三維激光掃描技術(shù)在道路工程測繪中的應(yīng)用[J]. 北京測繪,2011(2):48~51.
[4] 孔祥玲,歐斌. 三維激光掃描技術(shù)在隧道工程竣工測量中的應(yīng)用研究[J]. 城市勘測,2013(2):100~102.
[5] 王星杰. 三維激光掃描儀在道路竣工測量中的應(yīng)用[J]. 北京測繪,2012(4):21~25.
[6] 胡堯,秦巖賓,張廷斌等. 三維激光掃描在建設(shè)工程竣工規(guī)劃核實(shí)中的應(yīng)用研究[J]. 測繪與空間地理信息,2015(5):109~111.
Application of 3D Laser Scanning in Final Surveying of Elevated Rail Segment
Liu Xuan1,Gu Bo2
(1.Ningbo Institute of Surveying & Mapping,Ningbo 315800,China;2.The Centre of Ningbo Alatu Digital Technology,Ningbo 315800,China)
Introduces the process of the 3D laser scanning technology used in the final surveying data acquisition of Elevated rail segment,and the operations of data de-noising,filtering,registration,splicing,obtain elevated section of the point cloud model,extract vertical and horizontal cross-section,verify the feasibility of 3D laser scanning technology used in the final surveying of elevated rail segment.
3D Laser scanning;rail transit;final surveying;vertical and horizontal cross-section;point clouds data
1672-8262(2017)04-146-03
P258
B
2016—12—09
劉炫(1984—),男,工程師,主要從事城市工程測量工作。
猜你喜歡
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年9期)2019-11-25 07:33:02
浙江國土資源(2019年10期)2019-10-31 03:17:00
建材發(fā)展導(dǎo)向(2019年10期)2019-08-24 06:25:28
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2018年3期)2018-05-31 08:52:45
江西建材(2018年4期)2018-04-10 12:37:38
數(shù)學(xué)小靈通(1-2年級(jí))(2017年10期)2017-11-08 08:39:45
中國公共安全(2017年7期)2017-10-13 08:18:11
電子制作(2017年9期)2017-04-17 03:01:00
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21