一種連續(xù)波系統(tǒng)測(cè)速時(shí)間誤差的自適應(yīng)修正方法
2017-09-03 10:27:52張慧娟
兵器裝備工程學(xué)報(bào) 2017年8期
關(guān)鍵詞:方法
魏 超,張慧娟,李 冬
(中國(guó)人民解放軍91550部隊(duì)94分隊(duì), 遼寧 大連 116023)
【裝備理論與裝備技術(shù)】
一種連續(xù)波系統(tǒng)測(cè)速時(shí)間誤差的自適應(yīng)修正方法
魏 超,張慧娟,李 冬
(中國(guó)人民解放軍91550部隊(duì)94分隊(duì), 遼寧 大連 116023)
提出一種針對(duì)連續(xù)波測(cè)量系統(tǒng)測(cè)速數(shù)據(jù)時(shí)間不對(duì)齊誤差的自適應(yīng)修正方法。在多源信息融合處理解算飛行器軌跡時(shí),將連續(xù)波測(cè)速數(shù)據(jù)的時(shí)間誤差作為待估參數(shù)求解。建立飛行器軌跡參數(shù)和時(shí)間誤差的聯(lián)合求解模型,采用分步優(yōu)化法給出飛行器軌跡參數(shù)和連續(xù)波系統(tǒng)中各單臺(tái)設(shè)備的時(shí)間誤差估計(jì)值。實(shí)驗(yàn)結(jié)果表明:測(cè)速數(shù)據(jù)修正后,匹配程度明顯優(yōu)于修正前,飛行器軌跡參數(shù)的計(jì)算精度得到顯著提高。
連續(xù)波測(cè)量系統(tǒng);數(shù)據(jù)融合;時(shí)延修正;非線性估計(jì)

1 時(shí)間誤差對(duì)連續(xù)波雷達(dá)精度的影響分析
時(shí)間誤差引起的測(cè)量誤差和最終飛行器軌跡誤差,通常與目標(biāo)運(yùn)動(dòng)特性、誤差傳播規(guī)律、測(cè)量體制和觀測(cè)量本身有關(guān),且無論單向多普勒測(cè)速或雙向相干測(cè)速均會(huì)由于短期頻率穩(wěn)定度影響多普勒測(cè)速精度[6],因此,不便寫出通用模型。

對(duì)速度誤差的修正,一般采用定位信息,由于連續(xù)波測(cè)速時(shí)間誤差修正對(duì)定位精度并不敏感,也可利用其他定位信息源對(duì)測(cè)速元進(jìn)行時(shí)間修正,如連續(xù)波雷達(dá)自身的定位信息、GPS定位、光學(xué)交會(huì)定位、單脈沖雷達(dá)定位信息、飛行器精確設(shè)計(jì)軌跡等[7-8]。
2 測(cè)速時(shí)間誤差修正模型


(1)


(2)
在已知連續(xù)波雷達(dá)測(cè)速元時(shí)延誤差的條件下,可利用式(2)對(duì)測(cè)速元進(jìn)行時(shí)延誤差修正。
下面建立測(cè)速時(shí)延誤差和軌跡參數(shù)的聯(lián)合求解模型,同時(shí)解算測(cè)速時(shí)延誤差和軌跡參數(shù)。
軌跡參數(shù)的3次不等距節(jié)點(diǎn)樣條表示為[9]:
(3)

軌跡測(cè)量數(shù)據(jù)包括目標(biāo)的方位角、高低角、距離、徑向速度等幾種類型,t時(shí)刻的觀測(cè)量s可統(tǒng)一表示為
(4)

假設(shè)總共有N個(gè)觀測(cè)量s1,s2,…,sN參與軌跡參數(shù)解算,建立如下觀測(cè)方程組:
(5)


3 測(cè)速時(shí)間誤差求解
其中

步驟1 設(shè)最大迭代次數(shù)為M,收斂閾值取為δ>0,令i=0,初始收斂因子ω0>0,收斂因子ω=ω0,初始時(shí)間誤差Δt(0)=0。




步驟1 設(shè)置最大迭代次數(shù)L,收斂閾值取為τ>0,令j=0,初始收斂因子λ0>0,收斂因子λ=λ0,由初始軌跡參數(shù)計(jì)算其初值β(0)(Δt)。


上述算法步驟中的收斂閾值δ和τ的大小會(huì)影響計(jì)算誤差和迭代次數(shù),減小收斂閾值能夠減少計(jì)算誤差,但會(huì)增加迭代次數(shù),從而增加計(jì)算耗時(shí)。綜合考慮計(jì)算誤差和計(jì)算效率,選取δ=0.000 1,τ=0.000 1,算法經(jīng)過4~6次迭代,時(shí)延估計(jì)誤差即可小于0.000 001 s。算法中引入收斂因子ω和λ是為了保證每步迭代都能沿著梯度下降的方向使RSS的值減少,從而避免迭代發(fā)散。
4 仿真實(shí)驗(yàn)與結(jié)果分析
這里通過仿真實(shí)驗(yàn)檢驗(yàn)時(shí)延誤差修正方法的性能。仿真實(shí)驗(yàn)中的測(cè)量設(shè)備包括連續(xù)波雷達(dá)、單脈沖雷達(dá)、光學(xué)經(jīng)緯儀,其中,3臺(tái)連續(xù)波雷達(dá)的速度測(cè)元的時(shí)延誤差分別為0.01 s、0.012 5 s和0.015 s。
圖1~圖6是3臺(tái)雷達(dá)測(cè)速元時(shí)延修正前后的殘差對(duì)比圖,可以看出,時(shí)延誤差修正前測(cè)速元?dú)埐钣忻黠@的趨勢(shì),修正后測(cè)速元?dú)埐钰厔?shì)消失,時(shí)延誤差的估計(jì)值分別為0.010 035 s、0.012 499 s和0.015 007 s,接近于仿真時(shí)延誤差值,表明利用上述方法能夠準(zhǔn)確估計(jì)出連續(xù)波雷達(dá)測(cè)速元的時(shí)延誤差。
圖7和圖8分別是時(shí)延誤差修正前后軌跡位置參數(shù)和速度參數(shù)的誤差對(duì)比,修正前位置誤差為9.57 m,速度誤差為0.127 m/s,修正后位置誤差為0.06 m,速度誤差為0.007 m/s,表明本文方法能顯著提高軌跡參數(shù)的計(jì)算精度。
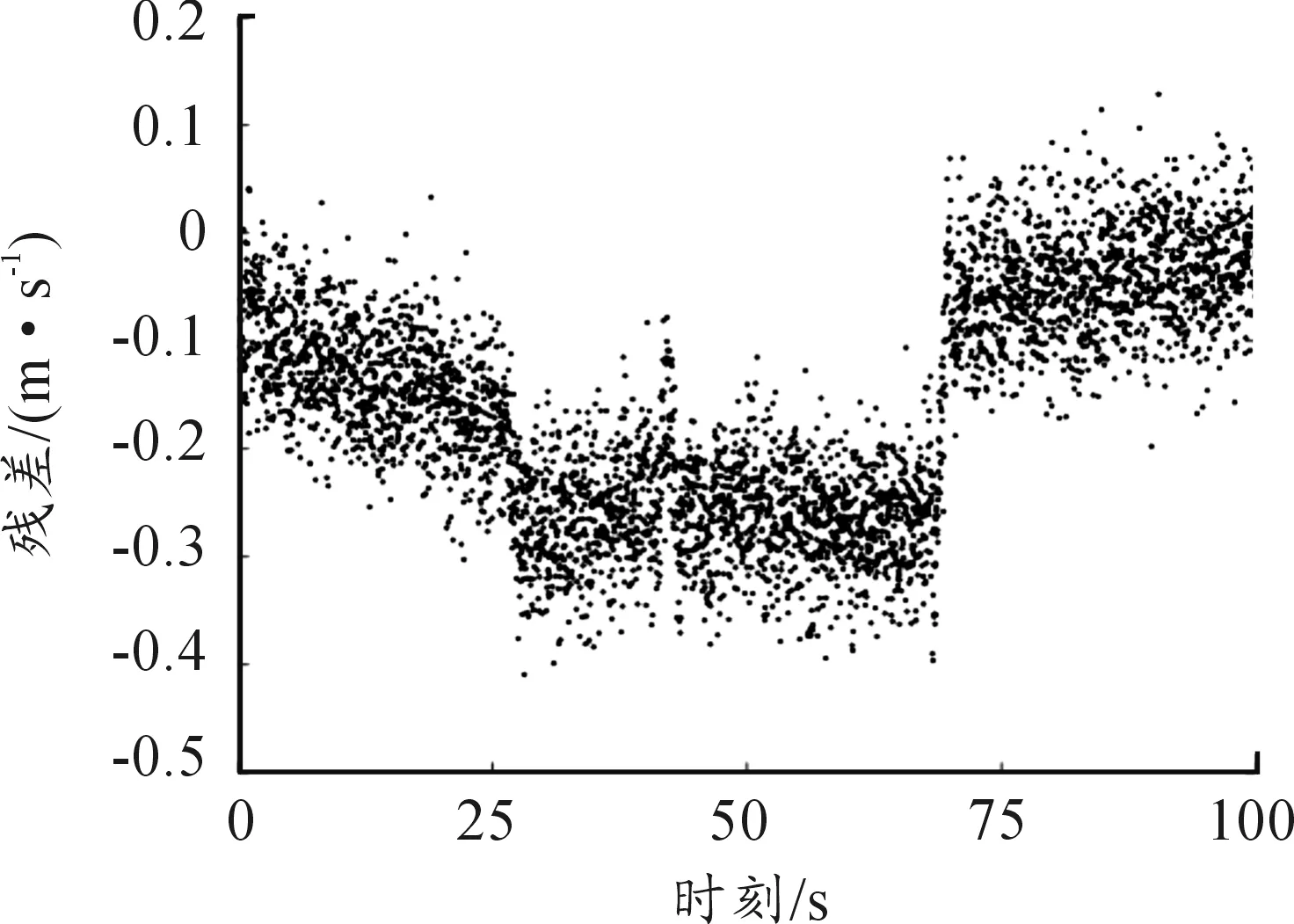
圖1 雷達(dá)1未修正時(shí)延誤差的測(cè)速殘差

圖2 雷達(dá)1修正時(shí)延誤差后的測(cè)速殘差

圖3 雷達(dá)2未修正時(shí)延誤差的測(cè)速殘差

圖4 雷達(dá)2修正時(shí)延誤差后的測(cè)速殘差

圖5 雷達(dá)3未修正時(shí)延誤差的測(cè)速殘差
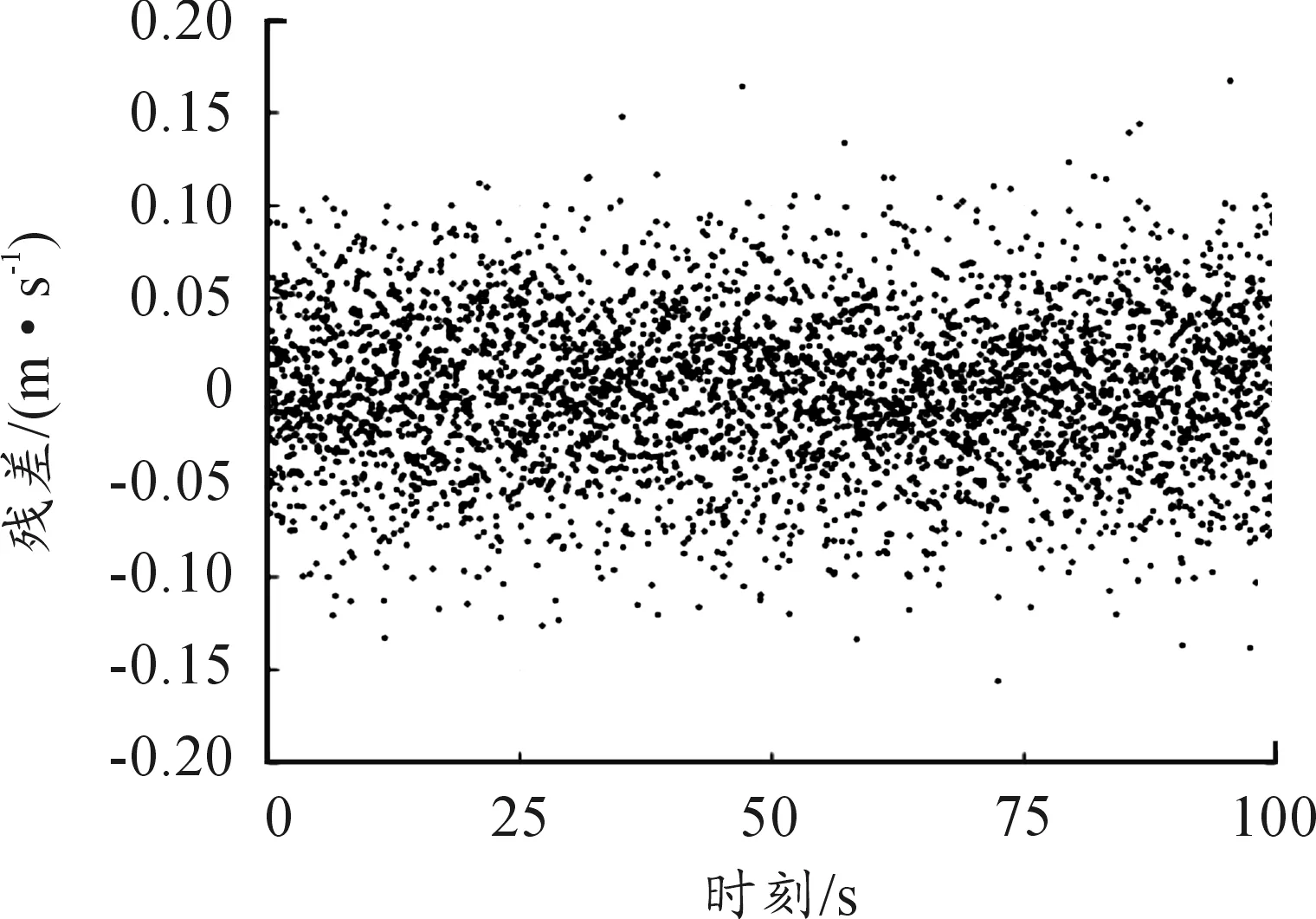
圖6 雷達(dá)3修正時(shí)延誤差后的測(cè)速殘差
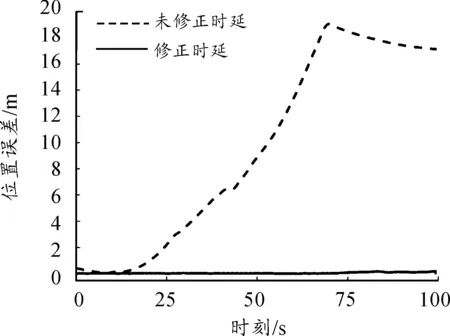
圖7 軌跡位置參數(shù)誤差

圖8 軌跡速度參數(shù)誤差
5 結(jié)論
詳細(xì)分析了連續(xù)波雷達(dá)測(cè)速數(shù)據(jù)的時(shí)間誤差對(duì)軌跡測(cè)量精度的影響,針對(duì)高動(dòng)態(tài)運(yùn)動(dòng)條件下,目標(biāo)軌跡跟蹤高精度測(cè)量的要求,采用非線性融合參數(shù)估計(jì)方法將軌跡用3次樣條表示,通過建立測(cè)速時(shí)延誤差和軌跡參數(shù)的聯(lián)合模型,將時(shí)延誤差、樣條系數(shù)和系統(tǒng)誤差作為待估參數(shù)求解。算例分析結(jié)果表明,利用本文方法可準(zhǔn)確估計(jì)速度測(cè)元的時(shí)延誤差,顯著提高飛行器軌跡參數(shù)的解算精度。本方法已在工程試驗(yàn)中得到應(yīng)用。
[1] LIU Y,DENG Y K,WANG R,et al.Bistatic FMCW SAR signal model and imaging approach[J].IEEE Transactions on Aerospace and Electronic Systems,2013,49(3):2017-2028.
[2] 劉嘉興.測(cè)距誤差的群時(shí)延特性分析方法及其在深空測(cè)控中的應(yīng)用[J].飛行器測(cè)控學(xué)報(bào),2009,28(2):22-26.
[3] 侯志,繆晨,吳文,等.一種對(duì)稱三角線性調(diào)頻連續(xù)波雷達(dá)的校正算法[J].兵工學(xué)報(bào),2010,31(12):1546-1550.
[4] 夏南銀.航天測(cè)控系統(tǒng)[M].北京:國(guó)防工業(yè)出版社,2002.
[5] 李華敏,王瑛,李曉松.多站制CW雷達(dá)目標(biāo)動(dòng)態(tài)模擬器設(shè)計(jì)[J].電訊技術(shù),2012,52(1):58-61.
[6] 賈興泉.連續(xù)波雷達(dá)數(shù)據(jù)處理[M].北京:國(guó)防工業(yè)出版社,2005.
[7] 完誠(chéng).一種毫米波調(diào)頻連續(xù)波雷達(dá)的目標(biāo)速度測(cè)量方法[J].艦船電子對(duì)抗,2016,39(4):47-51.
[8] 紀(jì)飛,樓生強(qiáng),辛勤,等.連續(xù)波雷達(dá)加速度和速度估計(jì)方法研究[J].現(xiàn)代電子技術(shù),2011,34(21):17-22.
[9] 王正明,易東云,周海銀,等.彈道跟蹤數(shù)據(jù)的校準(zhǔn)與評(píng)估[M].長(zhǎng)沙:國(guó)防科技大學(xué)出版社,1999.
[10]費(fèi)業(yè)泰.誤差理論與數(shù)據(jù)處理[M].北京:機(jī)械工業(yè)出版社,2000.
(責(zé)任編輯 周江川)
An Adaptive Time-Error Correction Method for Velocity Measurement of Continuous Wave Radar System
WEI Chao, ZHANG Huijuan, LI Dong
(Unit 94, the No. 91550thTroop of PLA, Dalian 116023, China)
An adaptive time-error correction method for the velocity element of continuous wave (CW) radar measurement system is proposed in this paper. When the multi-source data fusion method is used to calculate the trajectory of aircraft, the time-error in velocity measurement of the CW radar is treated as a parameter to be estimated. The combined computation model for the trajectory parameters and time-error is constructed. By using stepwise optimization method, the trajectory parameters and the time-error in velocity measurement of each single device are jointly estimated. The experiment results indicate that the corrected velocity matches the real value, and the estimation accuracy of trajectory parameters is highly improved.
CW radar measurement system; data fusion; time-error correction; non-linear estimation
2017-04-25;
2017-05-25
魏超(1981—),男,工程師,主要從事裝備試驗(yàn)數(shù)據(jù)處理研究。
10.11809/scbgxb2017.08.010
format:WEI Chao, ZHANG Huijuan, LI Dong.An Adaptive Time-Error Correction Method for Velocity Measurement of Continuous Wave Radar System[J].Journal of Ordnance Equipment Engineering,2017(8):41-44.
TN957.52
A
2096-2304(2017)08-0041-04
本文引用格式:魏超,張慧娟,李冬.一種連續(xù)波系統(tǒng)測(cè)速時(shí)間誤差的自適應(yīng)修正方法[J].兵器裝備工程學(xué)報(bào),2017(8):41-44.
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫報(bào)(2021年2期)2021-05-25 02:07:46
中學(xué)生數(shù)理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫報(bào)(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長(zhǎng)指南(2015年7期)2015-08-11 15:03:12
小雪花·成長(zhǎng)指南(2015年4期)2015-05-19 14:47:56