基于Ma t l a b的MOT OMA N-MH 1 2機器人正運動學仿真
2017-08-30 00:17:22廣東工業大學自動化學院
電子世界 2017年15期
廣東工業大學自動化學院 陳 才
基于Ma t l a b的MOT OMA N-MH 1 2機器人正運動學仿真
廣東工業大學自動化學院 陳 才
通過研究安川公司的MOTOMAN-MH12機器人,對機器人的各項關節運動參數分析解讀,然后通過DH坐標系的建立和使用齊次變換矩陣建立機器人正運動模型。最后,使用MATLAB軟件進行仿真,與廠商給出的機器人運動范圍做對比,從而驗證所建坐標系和正運動模型的準確性和正確性。
MOTOMAN-MH12機器人;正運動學;MATLAB;DH參數表
0 引言
本款機器人MOTOMAN-MH12采用流線型手臂構造,最大可以搬運重量12kg,是同級別中最快的工業機器人,大大提高了生產力。
本文以MOTOMAN-MH12機器人為研究對象。首先通過分析工作范圍和尺寸,建立空間坐標系,以及DH參數表,最后建立數學模型,利用Matlab對其工作空間,正運動學進行模擬仿真。
1 機器人的結構參數
MOTOMAN-MH12機器人有6個關節,每個關節的運動范圍如下圖表所示。S軸是固定底座旋轉,L軸和U軸是沿著垂直方向旋轉,軸R,B,T是固定在手腕上旋轉擺動。
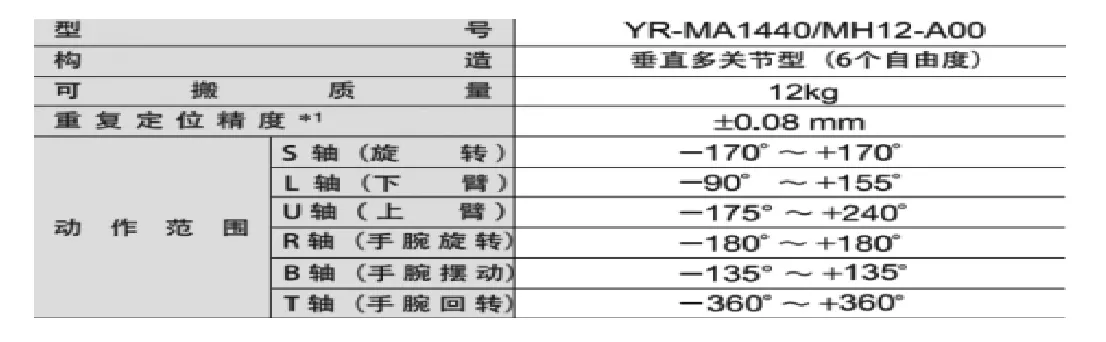
表1 MOTOMAN-MH12機器人關節運動范圍
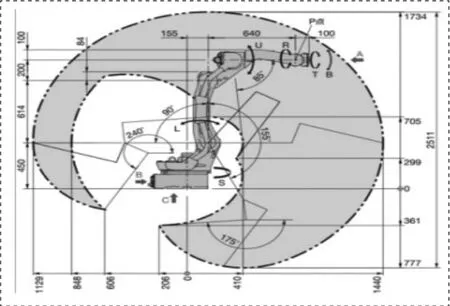
圖1 MOTOMAN-MH12機器人
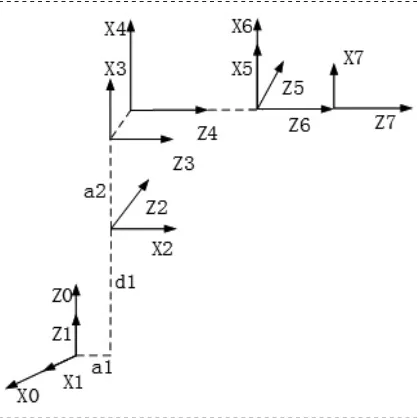
圖2 MOTOMAN-MH12 DH坐標系
根據每個關節的運動狀態,以及模型圖可建立MOTOMANMH12的空間坐標系(見圖2)。
根據建立的坐標系可以寫出其對應的DH參數表:
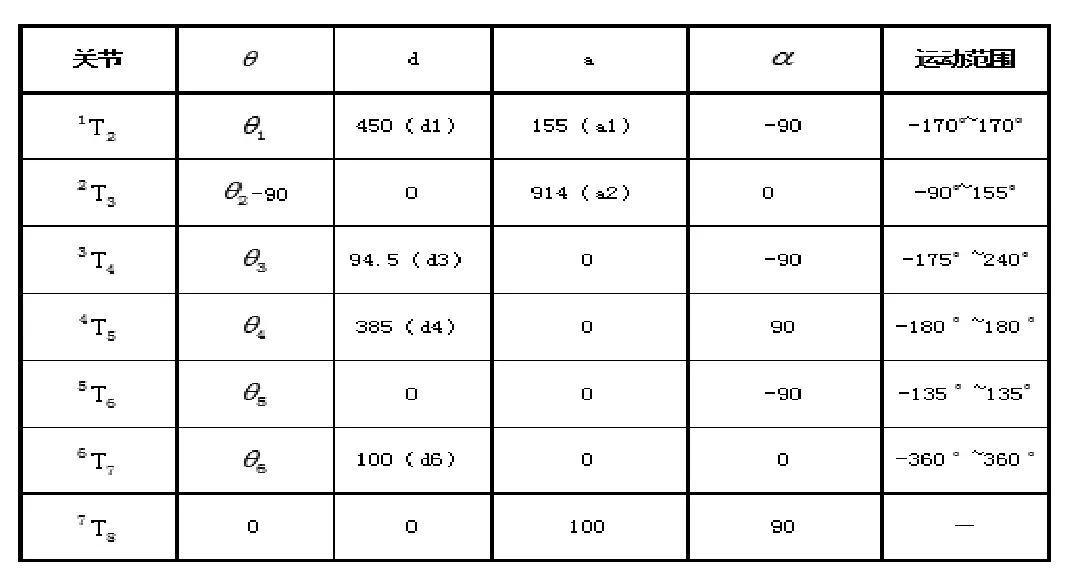
表2 MOTOMAN-MH12機器DH參數表
2 機器人正運動學分析
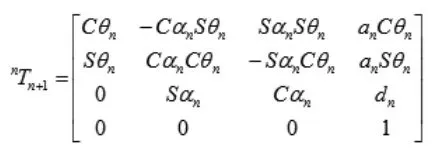
運動學正解是通過給定機器人的各個連桿的幾何參數和關節變量,從而求得尾端連桿坐標系相對于基坐標系的位姿。我們用齊次變換矩陣表示連桿n坐標系在連桿n+1坐標系下的位姿。因此可得:
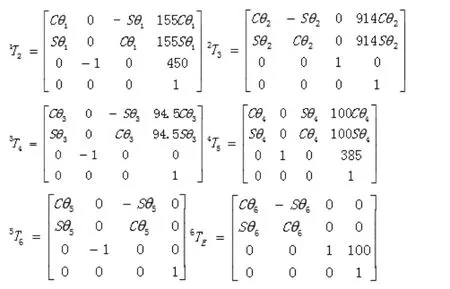
由DH參數表可得各連桿變換矩陣如下:
再由MOTOMAN-MH12機器人的正運動學方程,機器人末端連桿相對于固定坐標系的變換可表示為:
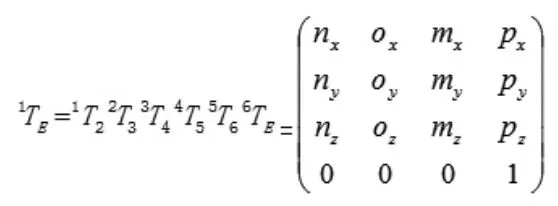
得到:
3 MOTOMAN-MH12機器人仿真
機器人的工作空間表示了機器人的各個關節的活動范圍,同時它也是衡量機器人工作能力的一個重要指標。本文運用matlab對其工作空間進行模擬仿真效果圖如圖3所示。
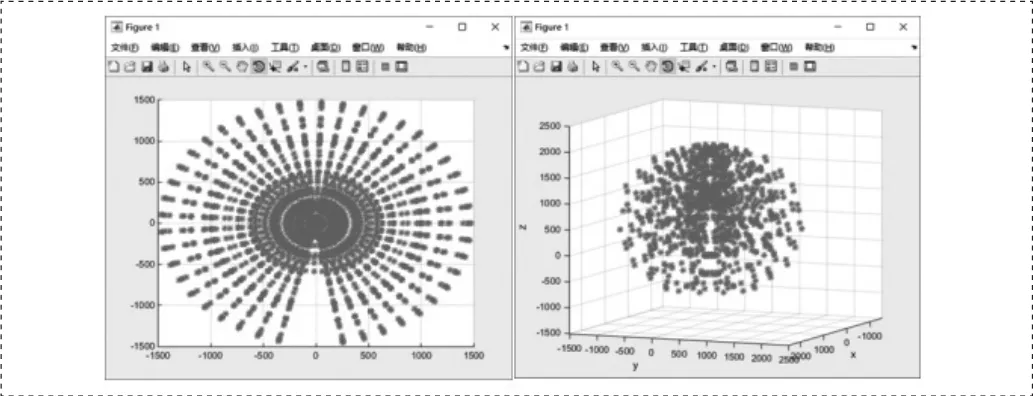
圖3 模擬仿真效果圖
正運動學仿真效果圖如圖4所示。
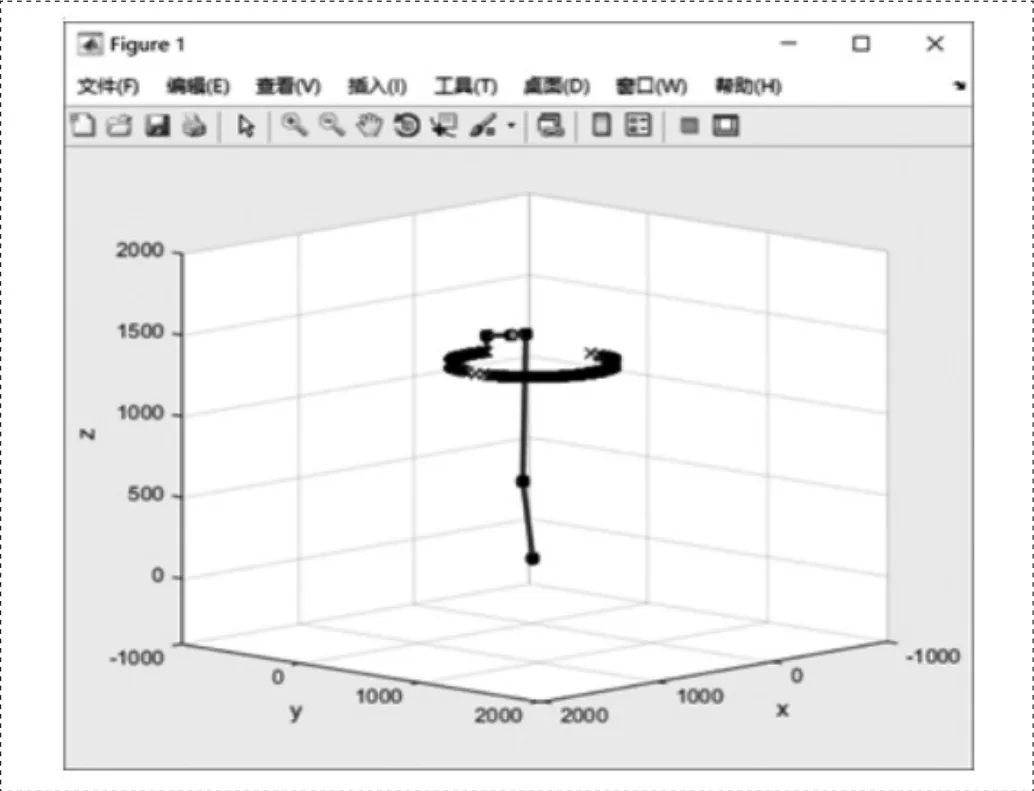
圖4 正運動學仿真效果圖
4 結論
本文通過MATLAB對安川公司的MOTOMAN-MH12機器人進行數學建模,正運動學分析,仿真得到該款機器人的工作空間和關節運動與官方給出的工作空間和參數基本一致,驗證了所建立的機器人數學模型,正運動學分析的正確性。從而對機器人的運動學研究更為直觀,方便。
[1]王庭樹.機器人運動學及動力學[M].西安電子科技大學出版社,1990,1:24-26.
[2]郭洪紅.工業機器人技術(第三版)西安電子科技大學出版社,2016,6:978-7-5606-4106-5.
[3]艾青林,計時明,金明生,等.一種六自由度鋼帶并聯機器人機構[P].中國,ZL 200610049643.0.2008-01-09.
[4]張憲民,楊麗新,黃沿江.工業機器人應用基礎[J].機械工業出版社,2015,1(10):9787111510598.
[5]蘇先義.六自由度鋼帶并聯機器人失穩有限元分析[D].杭州:浙江工業大學,2009.
[6]滕宏春.工業機器人與機械手[J].電子工業出版社,2015,1(2): 9787121251559.
[7]葉暉,等.工業機器人實操與應用技巧[J].機械工業出版社,2010,1(10): 9787111317425.
陳才(1994—),江蘇泰興人,碩士,主要研究方向:ARM嵌入式系統。
陳才(1994—),江蘇泰興人,大學碩士,現就讀于廣東工業大學自動化學院。