基于ARMA模型的船舶海水冷卻系統參數預測
2017-08-30 00:01:21孫曉磊丁亞委郭克余鄒永久孫培廷
計算機測量與控制 2017年7期
孫曉磊,丁亞委,郭克余,鄒永久,孫培廷
(1.大連海事大學 輪機工程學院,遼寧 大連 1160262.中交機電工程局有限公司, 北京 100088)
基于ARMA模型的船舶海水冷卻系統參數預測
孫曉磊1,丁亞委1,郭克余2,鄒永久1,孫培廷1
(1.大連海事大學 輪機工程學院,遼寧 大連 1160262.中交機電工程局有限公司, 北京 100088)
船舶海水冷卻系統與船外海水直接接觸,工作環境較為惡劣,而基于小波理論、灰色理論等參數預測方法受環境影響較大,為了實現對船舶海水冷卻系統狀態參數的準確預測,提出了根據平穩時間序列建立自回歸移動平均模型(ARMA)的方法;介紹了ARMA模型原理及建模過程;選取“育鯤輪”海水冷卻系統6天的狀態參數作為訓練樣本,輸入到ARMA預測模型中進行訓練;在MATLAB環境下,獲得預測數據;運用平均絕對百分比誤差對預測模型的準確性進行驗證并對誤差進行分析,結果表明所建立的船舶海水冷卻系統狀態參數預測模型具有良好的預測能力,能有效地反應未來一段時間海水冷卻系統的工作狀態的變化,提示系統是否存在異常,為早期故障診斷提供有效手段,進而為船舶的穩定運營提供了條件。
自回歸移動平均模型;參數預測;冷卻水系統;平均百分比誤差
0 引言
現如今船舶工業發展迅速,無人船舶、智能機艙是未來船舶發展的方向。而船舶實現智能化[1]的前提是如何能夠正確地對船舶系統及設備的狀態參數進行預測與判斷。船舶冷卻水系統正常運行是確保船舶柴油機正常運轉的關鍵。如果發生船舶冷卻水系統故障或者其中某個設備故障的情況,導致船舶柴油機產生的三分之一左右的熱量不能及時地由燃燒室部件散發出去,那么將會對熱量直接接觸的部件造成極大的損壞,從而妨礙船舶的正常營運。目前,絕大部分船舶所采用冷卻水系統形式均為中央冷卻水系統,在這之中船舶海水冷卻系統在船舶冷卻水系統中的作用極其重要。首先,船舶系統中所有的熱交換都靠船舶海水冷卻系統完成,因此,海水冷卻系統的可靠性,保證了船舶熱量及時的散發和主機運行的可靠性;其次,船舶海水冷卻系統直接連通舷外海水,若發生故障可能會導致舷外海水直接進入機艙,對于船舶的安全造成隱患。因此,對船舶海水系統實現狀態參數預測及狀態趨勢判斷具有重要意義。目前國內在船舶海水冷卻系統狀態參數預測及相關方面的研究較少,在電力系統、汽車等領域中研究較多。孫娜等[2]以船舶冷卻水系統傳感器故障檢測問題為目標,提出了基于小波神經網絡預測器的傳感器故障診斷新方法,結合同倫算法優化網絡,解決小波神經網絡對初始值敏感容易引起錯誤的問題;馬超等[3]針對發動機特征參數預測中的參數選擇及預測模型建立的問題,提出一種基于粒子群優化核極限學習機 ( PSO - KELM) 的發動機特征參數預測方法,車輛在怠速和行駛工況下的特征參數預測結果表明, PSO - KELM 具有更高的預測精度;張曦等[4]為了解決機組運行過程中參數失效和優化過程中參數計算的問題,提出了基于核回歸(KPCR)的發電機組參數預測和估計方法。用正常數據建立機組參數的預測和估計模型,確定各變量之間的回歸關系,將其用于參數的在線預測與估計,某電廠 1000 MW 發電機組煙氣含氧量歷史特征數據集仿真試驗證明了該方法的有效性。由于多數狀態參數預測模型受外界環境影響較大,對預測參數的準確性有一定影響,ARMA模型將外界環境因素對系統的影響綜合了起來,將這些因素統一為時間因素來進行處理,不需細致分析外部環境因素對系統的影響,因此該模型具有所需歷史數據樣本較少,計算相對簡單,節約計算時間以及減少工作量的優點。介于以上優點,本文對基于ARMA時間序列的船舶海水冷卻系統狀態參數預測進行研究分析,證明其可行性。
1 ARMA模型原理及建模過程
1.1 ARMA模型原理
自回歸移動平均模型(ARMA: Auto-Regressive and Moving Model)由自回歸模型(AR:Auto-Regressive)和移動平均模型(MA:Moving-Average)混合構成[5]。其基本原理為:由于完整時間序列變化發展具有一定的規律性,按照其規律性,通過序列中的原始數據來預測未來序列的單值。
ARMA 模型的基本模型。
1)自回歸模型AR(p):
若時間序列Yt滿足下式子:
(1)
稱時間序列Yt為服從p階的自回歸模型。式中:φi(i∈[1,p])為自回歸系數,為確定模型需要對其求解;εt是t時刻的隨機擾動,為獨立同分布的隨機變量序列,服從N(0,σ2)。
由公式(1)可知,自回歸模型中Yt的值是關于Yt-i(i∈[1,p])和εt的線性函數,它和之前的響應及隨機擾動并無關聯。
2)移動平均模型MA(q):
若時間序列Yt滿足下式子:
(2)
稱時間序列Yt為服從q階的移動平均模型。式中:θi(i∈[1,q])為移動平均系數,為確定模型需要對其求解;εt-i(i∈[0,q])為t-i時刻的隨機擾動,服從N(0,σ2)。
由公式(2)可知,移動平均模型中Yt的值是關于εt和εt-i線性函數。該模型在t 時刻的響應值與其之前時刻的響應值Yt-i(i∈[1,q])無關。
3)自回歸移動平均模型ARMA(p,q)[6]:
若時間序列Yt滿足下式:
(3)
稱時間序列Yt為服從(p,q)階自回歸移動平均模型。由公式(3)可知,ARMA(p,q)這一模型中Yt的值是關于Yt-i(i∈[1,q])和εt-i(i∈[0,q])的線性函數。
1.2 ARMA 模型的建立流程
ARMA 模型是根據平穩時間序列建立的,在模型建立之前需要檢驗時間序列的平穩性。假如時間序列式非平穩的,則需要進行相關平穩化處理,直到滿足平穩性要求,之后建立ARMA 模型。ARMA 模型的建模分為以下四步。
1)時間序列平穩化:
首先對時間序列的平穩性進行判斷。如果是時間序列是平穩的,那么數值會穩定在一定的范圍內隨機波動,無明顯的規律性。如果時間序列是非平穩的,則經過不定次數的差分對非平穩時間序列進行處理,使其實現平穩化[5]。
2)模型的識別和定階:
建立ARMA模型時,自相關函數和偏自相關函數的收斂速度決定p、q值,AR(p)模型的自相關函數具有拖尾性,而偏自相關函數具有p步截尾性;MA(p)模型的自相關函數具有q步截尾性,而偏自相關函數具有拖尾性;ARMA(p、q)模型的自相關函數和偏自相關函數都具有拖尾性。自相關函數γk和偏自相關函數φkk計算如(4)(5)所示:
(4)
(5)
公式(4)中的γk是以k為變量的自相關序數列,自相關函數拖尾性是指模型的自相關函數按照負指數減少,而q步截尾性則是自相關函數在k>q后收斂較快直至為0。
公式(5)中的φkk是Yt-1,Yt-2,…,Yt-k+1,Yt-k對Yt做線性最小二乘估計得到的關于Yt-k的系數,偏自相關函數的p步截尾性是指偏自函數在k>p后收斂較快直至為0。
之后根據模型選取不同的p,q值及參數,采用AIC方法給模型定階[7],定階準則如公式(6)所示:
(6)
3)模型參數估計:
選取適當的時間序列模型參數估計方法,最小二乘估計法在對線性模型的估計中具有良好的統計性且計算量少等優勢,因此被應用的最為廣泛[9]。另外,實際模型參數的確定,則可通過MATLAB中ARMA 時間分析序列的函數armax(data,orders)估計參數來實現。
4)模型檢驗:
最后,對估計得到的模型進行檢驗,當模型的某些參數顯著為0時要對模型進行優化處理,必要時要重新建模,使模型達到最優。
2 海水冷卻系統狀態參數預測
2.1 海水冷卻系統狀態參數預測方案
首先,選取“育鯤輪”正常工況下海水冷卻系統的海水泵進口壓力、海水泵出口壓力、中央冷卻器海水進口壓力、中央冷卻器海水出口溫度和中央冷卻器淡水出口溫度五種狀態參數作為訓練樣本并進行預處理;之后,建立ARMA參數預測模型,將訓練樣本輸入到模型中進行訓練,在MATLAB環境下獲得上述五種狀態參數的預測值;最后,將預測值與實際值進行對比,運用平均百分比誤差法對預測模型進行驗證,并對誤差進行分析。預測方案框架圖如圖1所示。

圖1 海水冷卻系統狀態參數預測方案框架圖
2.2 狀態參數樣本數據選取
船舶在航行過程中,船舶冷卻水系統的狀態一般均處于平穩工況[10]。本文所采集的海水冷卻系統狀態參數均為非故障數據,即正常工況(表1)下采集的參數。每兩小時對系統中的海水泵進口壓力、海水泵出口壓力、中央冷卻器海水進口溫度、中央冷卻器海水出口溫度、中央冷卻器淡水出口溫度進行采集,記錄為一組數據。在預測模型初始構建過程中,模型參數進行多次調整,60組歷史數據和12組驗證數據已滿足模型預測精度要求,所以以前六天共60組海水冷卻系統狀態參數的歷史數據作為樣本,對第六天共12組數據變化的趨勢進行預測分析,并對第六天的實際值進行監控、實時記錄。六天簡要的實際歷史數據如表2所示。

表1 海水冷卻系統參數正常值
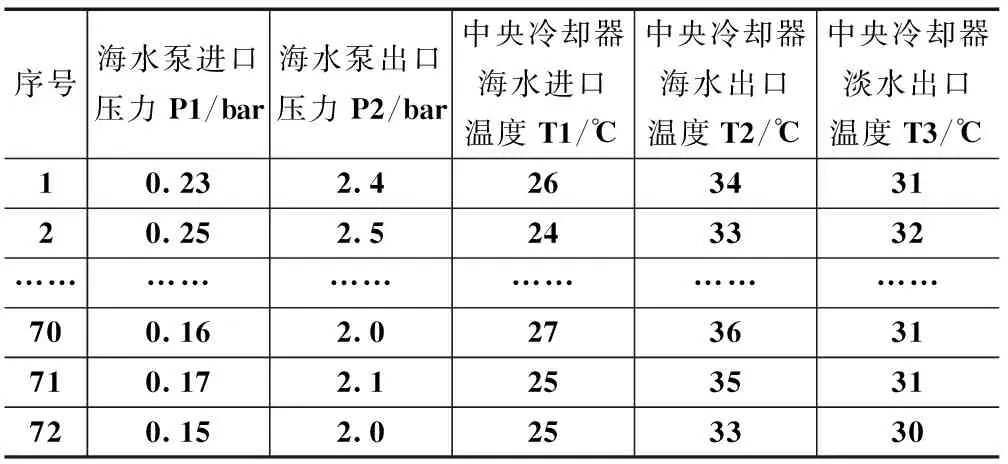
表2 正常工況下的海水冷卻系統狀態參數歷史數據
其中前五天共60組歷史數據樣本作系統訓練,第六天共12組實際歷史數據用作測試驗證。用MATLAB繪制的海水泵進口壓力(P1)、海水泵出口壓力(P2)歷史曲線圖如圖2所示。繪制的中央冷卻器海水進口溫度(T1)、海水出口溫度(T2)及低溫淡水出口溫度(T3)歷史數據曲線圖如圖3所示。
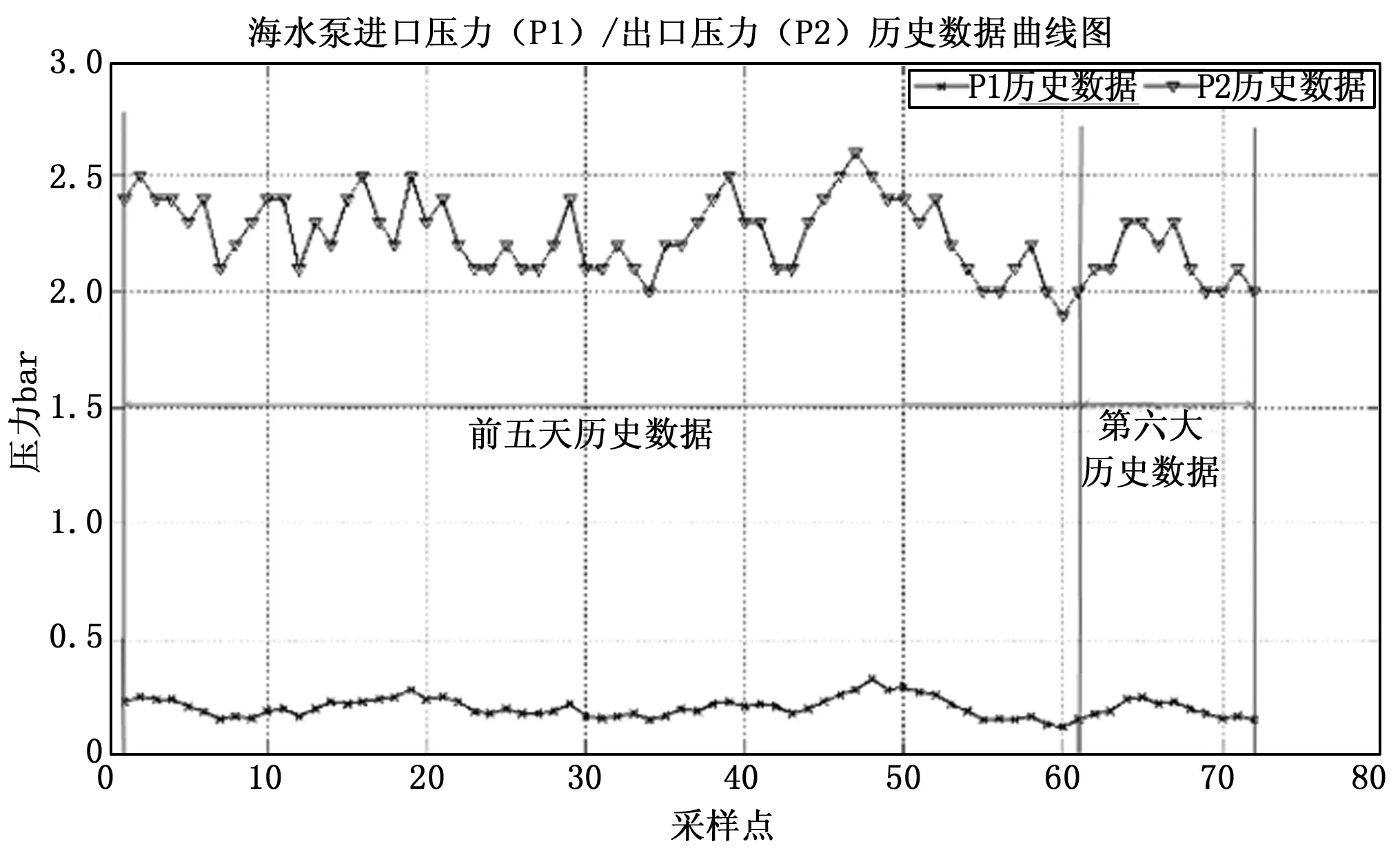
圖2 海水泵進口壓力(P1)/出口壓力(P2) 歷史數據曲線圖
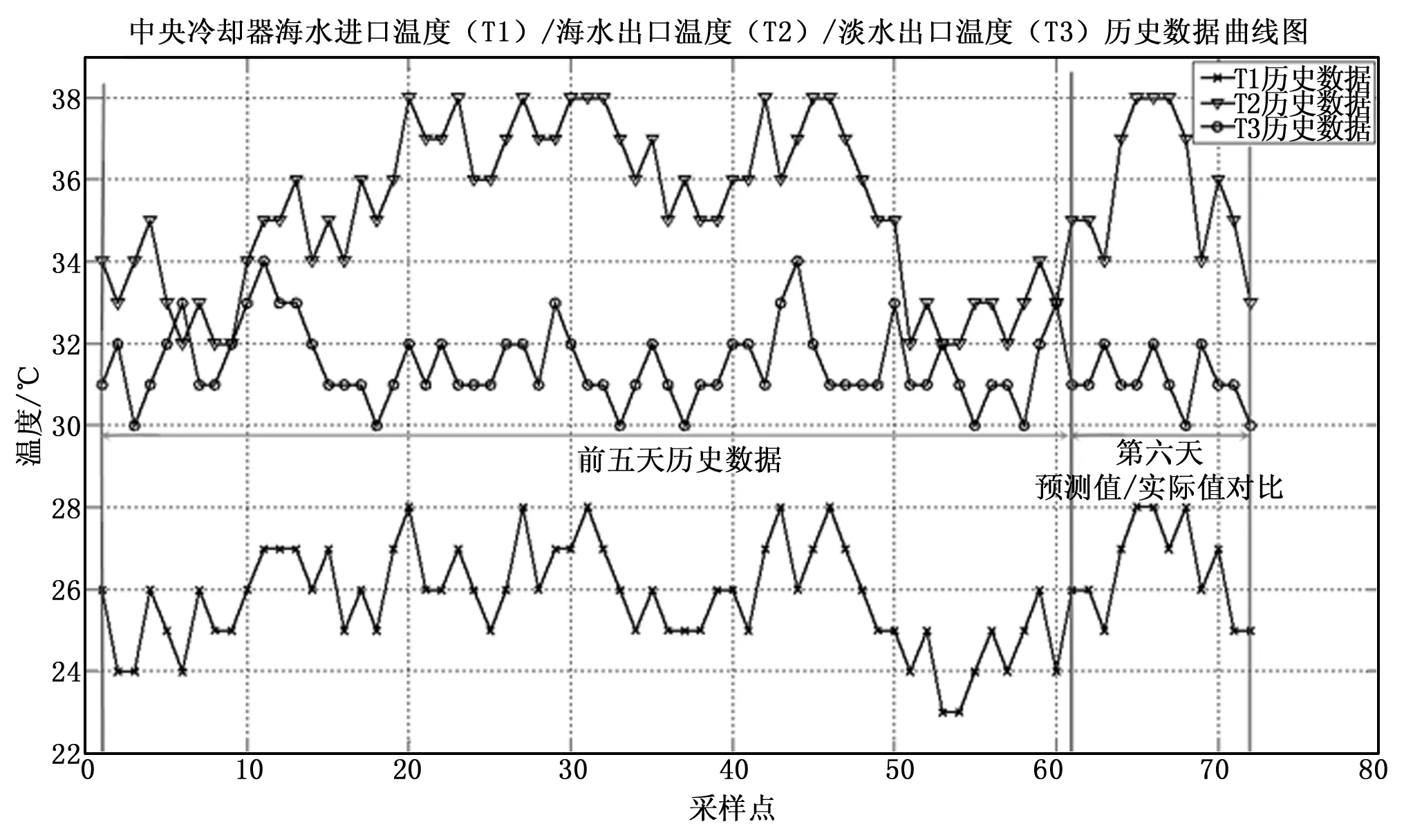
圖3 T1、T2、T3歷史數據曲線圖
由于本文所構造的ARMA模型只是為了使其達到數據預測數據的能力,因此對模型的驗證只要求擁有歷史數據即可,外界環境的因素暫時不在考慮范圍之內。
2.3 船舶冷卻水狀態模型確定
對冷卻水系統的狀態參數的趨勢進行預測的目的是能展望到之后一段時間內系統及各個設備的運行情況。先對一個數據窗口的長度進行規定,運用時間滾動技術使得窗口達到不斷的向前移動,完成新數據與老數據的更換,數據更替原理如圖4所示。
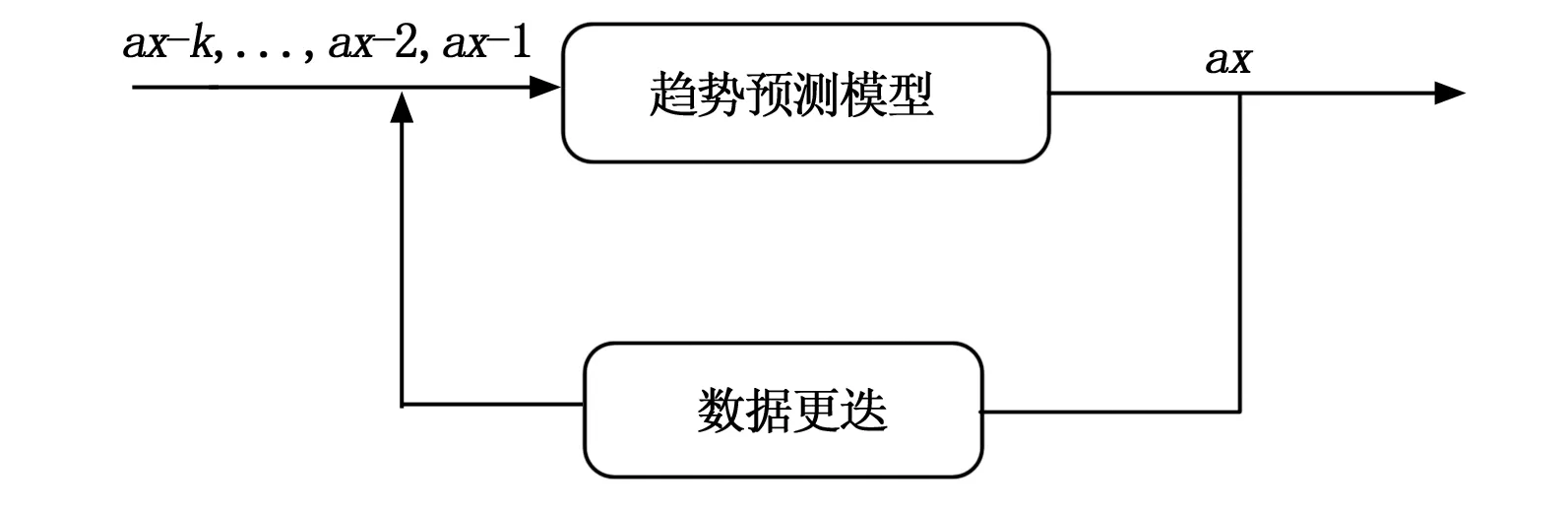
圖4 趨勢預測中數據更新原理
將原始數據去趨勢化完成后,研究分析海水冷卻系統五個狀態參數的自相關函數和偏自相關函數,可以得出,五個狀態參數去趨勢化后的偏自相關函數和自相關函數都表現為拖尾型,所以確定預測模型為ARMA(p,q)模型。
之后根據模型選取不同的p,q值及參數,采用AIC方法給模型定階,最佳階數要選擇使AIC 值最小的p和q,具體公式如公式(6)所示。經過在MATLAB軟件仿真后,發現當p,q取值為[3,3]時,AIC 值最小,所以最終的預測模型確定為ARMA(3,3)。在模型階次確定以后,利用MATLAB中armax函數估計模型參數。利用前五天共60組歷史數據作為訓練數據,第六天共12組歷史數據作為驗證數據。在MATLAB中編程,首先調用armax(data,[p,q])函數,正確設置預測模型相關參數,獲取趨勢預測模型,之后利用predict(sys,data,K)函數預測未來趨勢。圖5給出了海水冷卻系統狀態參數預測模型在輸入前五天共60組海水泵進口壓力歷史數據進行訓練之后,預測出的第六天12組壓力預測值,并將之與第六天實際歷史數據進行對比。
同理將海水泵出口壓力P2,中央冷卻器海水進口溫度T1、中央冷卻器海水出口溫度T2,中央冷卻器淡水出口溫度T3的前五天歷史數據輸入至海水冷卻系統狀態參數預測模型里,重新正確設置預測模型參數后,分別得到預測參數。圖6為海水泵出口壓力(P2)預測數據對比圖,圖7為T1、T2、T3預測數據對比圖。

圖5 海水泵進口壓力(P1)預測數據對比圖
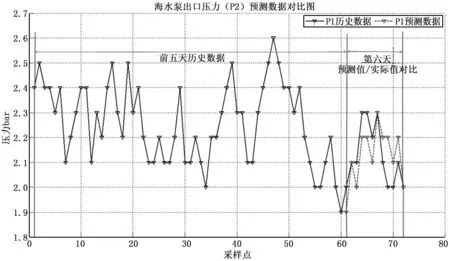
圖6 海水泵出口壓力(P2)預測數據對比圖

圖7 T1、T2、T3預測數據對比圖
從圖5、圖6和圖7中我們可以看出,將前五天采集的60組船舶海水冷卻系統狀態參數歷史數據輸入至狀態參數預測模型中,所輸出的預測數據作圖并與實際歷史數據進行對比,我們不難發現預測數據的整體趨勢與實際歷史數據還是較為吻合的,是圍繞狀態參數實際歷史數據上下波動的,具體預測誤差將在下一節中進行具體分析。
2.4 預測模型驗證及分析
預測結果存在不同程度的不確定性,這種不確定性就不能準確預測船舶海水冷卻系統的性能參數值,只能從統計意義上做出最優的選擇。因此,在趨勢預測之后,需對預測的數值的準確性進行評估,若評估效果不理想,則要對模型進行優化處理。本文采用的評價指標為:平均絕對百分比誤差[11](Mean Absolute Percentage Error, MAPE)。
平均絕對百分比誤差:
(7)
式中,N代表預測的個數,xf為預測值,xa為實際值。
將正常工況1下的海水冷卻系統狀態參數預測數據與實際歷史數據代入式(7)中進行計算,所得平均絕對百分比誤差(MAPE)如表3所示。

表3 海水冷卻系統預測參數平均絕對百分比誤差-正常工況1(%)
從表格中我們可以發現海水冷卻系統預測參數平均絕對百分比誤差MAPE基本大部分在10%以下,僅只有海水泵進口壓力P1最后一步預測值偏離實際值較多,從而造成預測步數為12時,P1平均絕對百分比誤差(MAPE)超過10%。分析原因可能是由于在中央冷卻系統中海水泵進口直接與舷外相連,受外部環境干擾較大,以至于預測數據偏差大,而P2、T1、T2、T3的平均絕對百分比誤差(MAPE)大部分處于5%以下。而且中央冷卻器淡水出口溫度T3的預測數據的平均絕對百分比誤差(MAPE)隨著預測步數的增加有逐漸減小的收斂趨勢。所以綜合海水冷卻系統五個狀態參數的預測趨勢,可以認為本文建立的海水冷卻系統狀態參數預測模型具有良好的預測功能。
3 結論
本文選取“育鯤輪”海水冷卻系統作為研究對象,根據其正常運行期間的五種狀態參數的歷史數據建立ARMA預測模型獲得預測數據,用平均絕對百分比誤差法對所建立的船舶冷卻水系統狀態參數預測模型進行驗證,結果表明本文所建立的船舶冷卻水系統狀態參數預測模型具有良好的預測功能,其預測出的數據能有效的反應未來一段時間內五種狀態參數的變化趨勢,進而有效的反應出未來一段時間海水冷卻系統的工作狀態的變化,提示系統是否存在異常,為早期故障診斷提供有效手段,并為系統中相關設備的工作剩余壽命的預測提供重要依據[12],為船舶的穩定運營提供了條件。
[1]史紅衛,史 慧,孫 潔,等. 服務于智能制造的智能檢測技術探索與應用[J]. 計算機測量與控制,2017,(01):1-48.
[2] 孫 娜,陶文華,李青苗,等. 基于小波神經網絡的船舶冷卻水系統的傳感器故障診斷[J]. 測控技術,2007,3(2):179-180..
[3] 馬 超,張英堂,李志寧. 基于PSO-KELM的發動機特征參數預測[J]. 控制工程,2014,(S1):28-32.
[4] 張 曦,陳世和,朱亞清,等. 基于KPCR的發電機組參數預測與估計[J]. 電力自動化設備,2010,(10):54-57.
[5] 史書真. 股價時間序列的分析與預測研究[D]. 大連:大連理工大學, 2013.
[6] Chalermarrewong T, See S, Achalakul T, editors. Parameter Prediction in Fault Management Framework[C]. Proceedings of The International Symposium on Grids and Clouds (ICGC 2012)-26 February-2 March; 2012; Taiwan.
[7] 韓路躍,杜行檢. 基于MATLAB的時間序列建模與預測[J]. 計算機仿真, 2005(4):105-107.
[8] Nadja Saleck and Lueder von Bremen. Wind power forecast error smoothing within a wind farm[Z].The Science of Making Torque from Wind, Conference Series 75 ( 2007) 012051.
[9] 張俊瀟,鄧長虹,陳允平. 最小二乘估計法優化電力系統網絡等值參數[J]. 電力科學與工程,2004(2):34-37.
[10] 許正福. 輪機動力裝置系統實驗室冷卻水系統設計研究[D]. 大連:大連海事大學, 2009.
[11] Tayman J, Swanson D A. On the validity of MAPE as a measure of population forecast accuracy[J]. PopulationResearch and Policy Review, 1999, 18(4):299-322.
[12] 徐野男. 基于時間序列的船舶冷卻水系統狀態參數預測分析[D]. 大連:大連海事大學,2015.
Ship Seawater Cooling System Parameter Prediction Based on ARMA Model
Sun Xiaolei1, Ding Yawei1, Guo Keyu2, Zou Yongjiu1, Sun Peiting1
(1.Marine Engineering College of Dalian Maritime University, Liaoning Dalian 116026, China 2.CCCC Mechanical & Electrical Engineering Co., Ltd.,Beijing 100088, China)
The ship seawater cooling system contacts with seawater, so the working environments and conditions are bad, and some parameter prediction methods are greatly influenced by the environment such as wavelet theory, gray theory and so on. In order to realize the state parameters prediction of ship seawater cooling system correctly, ARMA prediction model method of stationary time series is proposed. Then the principle and modeling process of ARMA model is introduced, selecting 6 days’ state parameters of MV “YUKUN” ship seawater cooling system as training sample, and inputting the training sample into the ARMA model, getting the prediction data by MATLAB. Then using the MAPE to verify the prediction model and analyzing the error, the result shows the model has good prediction ability.And the model can effectively response the changes of seawater cooling system’s working state in the period ahead and suggest weather the system is abnormal, and provide effective ways for the early fault diagnosis. Furthermore, the model provides advantages for the stable operation of the ships.
ARMA model; state parameters prediction; seawater cooling system; MAPE
2017-04-02;
2017-04-24。
孫曉磊(1994-),男,山東煙臺人,碩士研究生。主要從事船舶遠程監控與故障診斷方向的研究。
1671-4598(2017)07-0285-05
10.16526/j.cnki.11-4762/tp.2017.07.071
U664.81
A
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
艦船科學技術(2022年14期)2022-09-22 03:07:40
艦船科學技術(2022年2期)2022-03-29 01:12:44
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
船舶標準化工程師(2019年4期)2019-07-24 07:21:12
中國船檢(2017年3期)2017-05-18 11:33:09
光學精密工程(2016年6期)2016-11-07 09:07:19
核科學與工程(2015年4期)2015-09-26 11:59:03