人機協調運動控制方法研究現狀與關鍵技術分析
2017-08-29 14:32:43岳海波
河南科技 2017年13期
岳海波
(鄭州機電工程研究所,河南 鄭州 450015)
人機協調運動控制方法研究現狀與關鍵技術分析
岳海波
(鄭州機電工程研究所,河南 鄭州 450015)
人機協調運動控制方式是指實現與人動作相協調的機器人動作控制方式。在日常生活中,人與人合作搬運是比較常見的,但是人的機械強度有限,無法完成超過極限的負載搬運。因此,為了充分發揮人與機器人的優勢,提出人機合作助力方式,延伸到外骨骼系統,它們有一個共同的特點就是人與機器人在運動過程中一直處于接觸狀態。人機協調運動控制方法主要包括負荷分配控制、阻抗控制、直接力控制、智能控制等。
機器人;人機協調;運動控制
隨著機器人技術的創新與發展,機器人的工作模式由單獨完成簡單任務逐漸轉變為人機協作完成復雜任務。在人口老齡化和勞動力缺乏的背景下,機器人扮演的角色越來越重要,某些特種工作環境需要機器人參與完成,而在一些需要保持人類主觀性的工作條件下,人機協作系統則能發揮重要的作用。
在人機協作過程中,需要機器人能夠自然友好地與人交互,人機協調運動控制的研究具有重要的理論意義及實際應用價值。為了提高人機協作系統的穩定性與安全性、減輕操作者勞動強度、增強操作舒適性,研究人員提出了多種人機協調運動控制方法。本文首先分析人機協調運動控制的方法,然后分析人機協調運動控制的關鍵技術。
1 人機協調運動控制方法
1.1 負荷分配控制
人與機器人協調搬運任務,如圖1所示。為了更加直觀,人與機器人沿水平方向協調搬運重物的單自由度模型如圖2所示。
圖1 人與機器人協調搬運
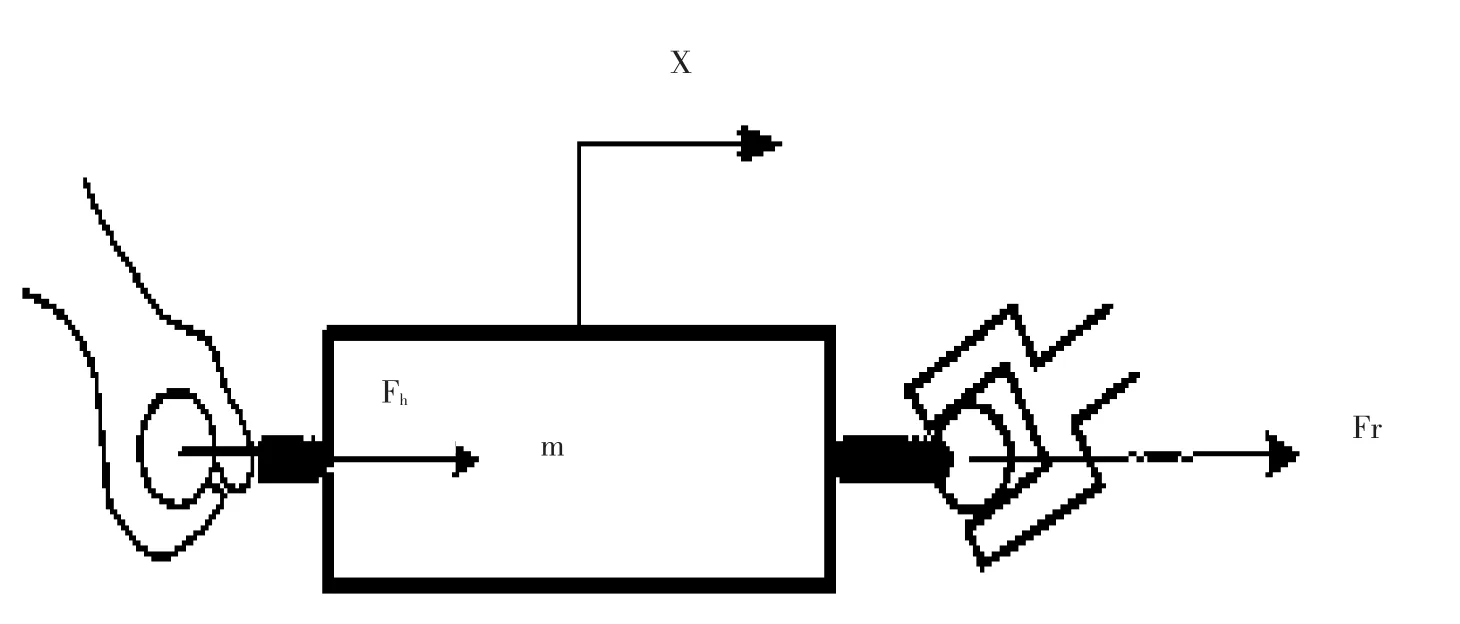
圖2 人與機器人沿水平方向協調搬運
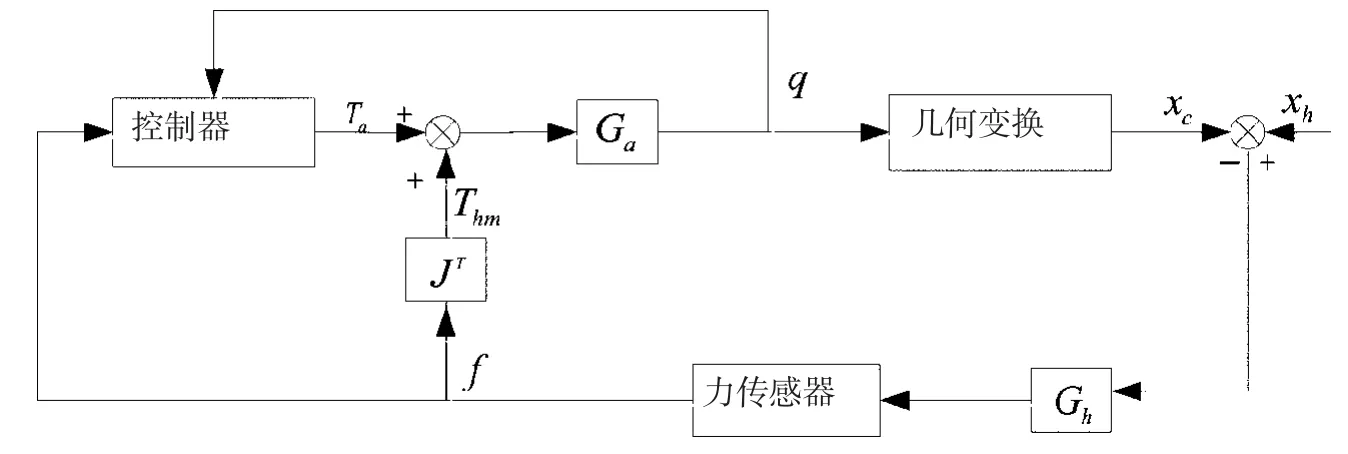
圖3 人機協調運動直接力控制原理圖
如圖2所示,設物體的重量為m,位移為x,人施加的力為Fh,機器人施加的力為Fr。在人與機器人合作任務中,機器人不應該充當主動角色,而必須跟隨操作者的運動,為操作者提供輔助。操作者控制物體的位置,并且承擔部分負載,而其他負載則由機器人承擔[1]。此方法的缺點為:當負載比較大的時候,啟動、停止及換向時,負載慣性力大,操作者施加的力大,操作者負擔重。
1.2 阻抗控制
阻抗控制應用于人機協調運動控制中,通過調節阻抗參數,調整機器人末端與人機之間相互作用力的動態關系,所對應的物理含義是通過調整機器人的跟隨特性,調整人操作的舒適度,但是對人操作的舒適性還沒有明確的定義。
阻抗控制方法的根本思想是通過控制機械系統的位置與外界作用力之間的動態關系,從而達到控制的目的,將機械系統等效為“質量-彈簧-阻尼”模型,建立機械系統力與位移變量之間的動態關系,通過調節慣性、阻尼和剛度系數,實現機械系統的動態調節[2]。
Hogan阻抗控制算法最具代表性,將接觸力信息和位置信息納入統一的控制體系。因此,該控制器的設計調整依據輸出阻抗,建立力、位置、速度的阻抗關系式,從而完成既定的任務。通過該算法將輸入力信號引入位置控制中,形成包含交互力和位置信息的閉環控制。調整機器人的阻抗參數是本算法研究的難點和重點[3]。
阻抗控制依據實現方式不同可以分為基于位置的阻抗控制和基于力的阻抗控制。基于力的阻抗控制需要建立精確的動力學模型,而基于位置的阻抗控制方法則是通過跟蹤期望的位置來實現柔順控制。
1.3 直接力控制
在機器人與環境交互時,直接力控制是通過力反饋環路直接控制接觸力實現對期望接觸力的控制,然而機器人與人發生交互時,是依據力傳感器獲取人與機器人之間在操作空間的相互作用力,并且依據該力信息以及機器人的靜態模型設計控制轉矩,控制機器人關節的運動,從而進一步使人機間交互力最小化[4]。人機協調運動直接力控制原理如圖3所示,其中Ga表示機器人的動力學模型,Gh表示人機之間的交互模型,f表示人與機器人在操作空間的相互作用力,J表示機器人雅可比矩陣,Ta為驅動器施加的力矩,Thm為操作者施加的力矩,xc代表骨骼服操作空間的位置信息,xh代表操作者的位置信息。直接力控制也依賴于動力學模型的建立。
1.4 智能控制
智能控制是機器人控制的發展趨勢,智能控制分為多個方向,如模糊邏輯控制、神經網絡控制、專家系統控制、機器學習控制以及遺傳算法等。J.Moody和C.Darken在1980年提出RBF神經網絡,其是一種3層前向網絡采用這個控制策略,能提高系統的精度、魯棒性,適合應用于實時控制系統中。Connolly等設計的機器人控制器,將多層前向神經網絡用于力/位混合控制,傳感器檢測力和位置,經過神經網絡計算之后選擇矩陣和人力約束,并進行實驗驗證控制的可行性。楊智勇等人[5]介紹了RBF神經網絡在外骨骼機器人軌跡規劃中的應用,通過非線性映射計算,實時估計骨骼服的運動軌跡。
從當前的研究來看,智能控制往往應用到機器人的力控制中進行相應的計算和分析,智能控制和傳統的控制相結合,可以解決傳統控制的難題。比如,在人機協調運動中,操作者的運動意圖不能精準估計,采用智能控制可以找到人機交互力與運動狀態的非線性映射關系,因此智能控制在人機協調中的應用,仍然需要不斷去嘗試和探索。
2 人機協調運動控制的關鍵技術
2.1 人體運動意圖和環境信息的感知
機器人的感知方式主要包括視覺、力覺、聽覺、腦電波、表面肌電信號等。在某些場合,因為視覺感知易受環境光的影響,聽覺感知易受外界噪音的影響,腦電波和肌電信號不穩定等,因此力覺感知是最有效、最直接的感知方式。力感知方式具有廣泛的應用,如步行輔助裝置、護理機器人、建筑機器人、助力手推車等都是基于力感知的人機協作系統。目前,以力感知應用最為廣泛,但是人機協作系統,人是主動的,機器人是被動的,人機之間的交互力信息存在噪聲,導致人機系統容易振動,不穩定。通常采用濾波器讓交互力順滑,濾波器選擇不當,會造成延時現象,對機器人的跟隨響應有影響,系統的可操作性變差。
2.2 機器人柔順動作與人自然交互的控制策略
目前,基于力信息的人機協調運動控制,還存在如下問題:①在啟動、停止及改變移動方向時,因慣性導致動作不柔順;②人的作用力過大,導致突然大的加速度,操作者想在期望的位置停下來,此時手臂剛度比較大,人機協作系統發生震蕩,讓操作者感到不舒服,進而影響機器人的可操作性。因此,如何防止過大加速度或不連貫動作,保證系統的穩定性,讓操作者感覺到操作舒適、安全,是需要進一步研究的內容之一。
2.3 機器人與人共享工作空間時人身安全的實現方法
由于人機協作系統需要機器人與人共享工作空間,因此在人機協作系統工作時,在非結構化的環境中,機器人如何感知、預知危險,如何回避危險,以及如何在軌跡規劃中考慮安全因素等內容,是系統運行中確保人的安全的關鍵。
3 結語
目前,人機協調運動控制方法多是基于人機交互力信息,機器人需要通過力信息識別操作者的運動意圖,并跟隨操作者運動。在人機交互力信息的基礎上,融合視覺信息、腦電信號、肌電信號等多源信息,這是獲取人體運動意圖的發展方向。應用智能控制方法,應用人工智能最新研究成果,可以提高人機協調運動的柔順性。考慮操作者的運動特性,實現機器人預知危險,是實現人機協調運動,保證人身安全的途徑之一。
[1]Rahman M M,Ikeura R,Mizutani K.Investigation of the impedance characteristic of human arm for development of robots to cooperate with humans[J].JSME International Journal Series C Mechanical Systems,2002(2):510-518.
[2]A.B.Zoss,Kazerooni H,Chu A.Biomechanical design of the Berkeley lower extremity exoskeleton(BLEEX)[J].IEEE/ASME Transactions on Mechatronics,2006(12):128-138.
[3]蔣再男,劉宏,黃劍斌,等.基于阻抗內環的新型力外環控制策略[J].航空學報,2009(8):1515-1520.
[4]楊智勇,歸麗華,楊秀霞,等.骨骼服直接力控制方法研究與仿真[J].系統仿真學報,2009(24):7868-7872.
[5]楊智勇,顧文錦,張靜,等.單兵負荷骨骼服的力控制理論與方法[M].北京:國防工業出版社,2013.
Research Advances and Key Technology Analysis of Man-machine Coordinated Motion Control
Yue Haibo
(Zhengzhou Institute of Mechanical and Electrical Engineering,Zhengzhou Henan 450015)
Man-machine coordinated motion control is a kind of robot motion control mode which is coordinated with human motion.In daily life,It is common of people to cooperate with others,but human mechanical strength is limited,unable to complete load handling beyond their limits,so in order to achieve full advantages of human and robot, the method of man-machine cooperation is proposed,applied to the exoskeleton system,these man-machine cooperation systems have a common characteristic is that people and robots is in contact in the process of movement.The man-machine coordinated motion control method mainly includes load distribution control,impedance control,direct force control,intelligent control,etc.
robot;man-machine coordinated;motion control
TP242
A
1003-5168(2017)07-0042-03
2017-06-02
岳海波(1986-),男,碩士,工程師,研究方向:機電一體化工程。
猜你喜歡
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
中華手工(2017年2期)2017-06-06 23:00:31
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
中外會展(2014年4期)2014-11-27 07:46:46
祝您健康(1987年3期)1987-12-30 09:52:32
