基于AMESim設計探索功能的兩種優化方法的對比
2017-08-09 22:28:19尹永芳
農機使用與維修 2017年8期
關鍵詞:優化
尹永芳
摘 要:在AMESim提供的簡單可視化的建模仿真環境下,建立1/4汽車主動懸掛模型。AMESim的兩種優化方法對該系統進行仿真,實現對主懸掛的主要阻尼和sky hook阻尼的匹配設計。仿真結果表明,NLPQL具有較快的仿真速度,精確度較高;基因算法則需要更長的仿真時間,但是在代數為100時仿真結果優于NLPQL。
關鍵詞:車輛;主動懸掛系統;NLPQL;基因算法;優化
中圖分類號:U463.33 文獻標識碼:A
doi:10.14031/j.cnki.njwx.2017.08.008
懸掛系統是汽車關鍵部件之一,對汽車的操縱穩定性和乘坐舒適性有重大影響。主動懸掛與被動懸掛、半主動懸掛相比具有獨特的優勢,并且隨著液壓和電子技術的發展,主動懸掛技術越來越完善,成為懸掛技術研究的重要方向。從研究方法來看,由傳統的數學建模發展到計算機建模與仿真,如采用Matlab、Pro/E等建模,這些工具通常建模過程復雜,仿真過程非可視化[1],而AMESim克服這些缺點,提供簡單可視化的建模和仿真環境。
1 AMESim軟件和設計探索模塊簡介
AMESim是機械/液壓系統建模仿真及動力學分析軟件,具有以下特點:(1)多學科的建模仿真平臺,機械、液壓、氣動、熱、電和磁等不同領域的模塊可實現物理連接。(2)圖形化建模方式,采用標準ISO圖標和多端口框圖作為基本模塊,簡單、易于識別。(3)仿真模式多樣化,AMESim設有動態仿真模式、穩態仿真模式、動態和穩態以及批處理仿真模式。(4)智能求解器,根據模型的數學特性自動選擇最佳的積分器,提高了建模仿真的效率[2]。
AMESim 提供了NLPQL和遺傳算法兩種優化方法[3]。NLPQL利用序列二次規劃算法(SQP),其基本思想是: 在每個迭代點x(k)構造一個二次規劃子問題,以這個子問題的解作為搜索方向Sk,沿該方向按迭代格式x(k+1)=x(k)+akSk進行一維搜索,使x(k+1)(k=0,1,∧)最終逼近約束優化問題的解x*。遺傳算法的基本思想是: 把優化設計搜索空間映射為生物遺傳空間,把設計變量映射為遺傳染色體即個體,所有個體組成遺傳群體,通過對群體進行選擇、交叉、變異等操作,將適應度大的個體保存下來,淘汰適應度小的。經過反復操作,直到求出最優個體。
2 汽車懸掛的建模和仿真
2.1 主動懸掛系統建模
首先,在草圖模式下加載圖標庫的主動懸掛系統,包括兩個模型,被動懸掛和主動懸掛,主動懸掛初始值和被動懸掛相同。系統參數的設置如下:MAS002(Car_Body)設為400,MAS002(Tire)設為50,SPR000A設為100000,STEP0設為0.1。此系統正通過一個10 cm的高臺,考察主動懸掛的工作性能,車身垂直加速度大降低乘坐舒適性,理想的車身垂直加速度小于g (9.81 m/s2);若模擬車胎的彈簧壓縮量為負,意味著車胎離開路面。
2.2 優化目標的確立
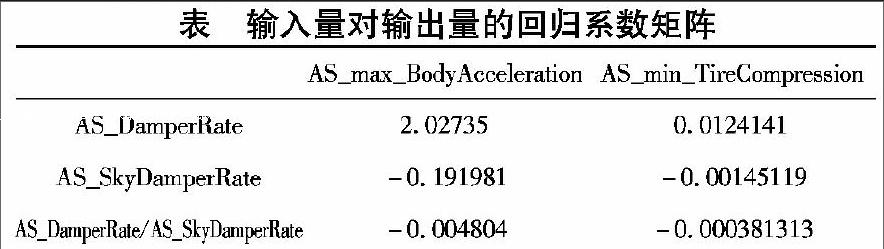
為了定義合理的優化目標,通常首先要對系統的輸入量和輸出量之間的關系進行研究,對輸出(Export)模塊進行設置,考察輸入量、輸出量、復合輸出之間的相關性,利用DOE得到輸入量對應復合輸出的矩陣如表。
該表表明線性回歸系數,正值表示正相關,負值表示負相關。因此期望設計較大的sky hook懸掛阻尼控制車身加速度;期望設計較大的主懸掛主要阻尼控制輪胎壓縮量。
3 基于設計探索模塊的優化
基于以上分析,引入車身位移和輪胎最大跳動值,設置在1.5 s (1) NLPQL優化。優化結果顯示,在主要懸掛阻尼為821 N·s/m,sky hook阻尼為1347 N·s/m時,最大車身加速度為8.60 m/s2,小于9.81 m/s2,車身最大位移量小于2 mm,但輪胎最大跳躍值超過了0.0 mm,未達到期望值。NLPQL優化前后的車身加速度和輪胎壓縮量均有明顯改善。 (2)基因算法優化。首先設置Max.number of generations為10,優化結果顯示車身加速度12.89 m/s2,大于9.81 m/s2,顯然是不合理的,因此10代的基因算法優化失敗。另設置Max.number of generations為100(大概運行8000次)進行優化,并與NLPQL的結果進行對比。 由仿真結果可知,基因算法的優勢在于在1.0 s時車身加速度趨于恒定值,而NLPQL拖后了0.5 s。主懸掛主要阻尼為941 N·s/m,sky hook懸掛阻尼為2475 N·s/m,此時最小車身加速度為8.70 m/s2,車身最大位移量0.0004 m,輪胎最大跳躍值0.0。由回歸系數矩陣可知,sky hook懸掛阻尼主要影響車身加速度,可以看出兩條曲線在1.5 s之前吻合稍差,即NLPQL優化結果1347 N·s/m與100代基因算法優化結果2475 N·s/m相差較大。 4 結論 (1)NLPQL具有較快的仿真速度,精確度較高,而基因算法在代數較大時通常更有效,但是要以更長的時間為代價。基因算法沒有停止運算的準則,如果中止運行,通常只能得到當前最佳值。(2)兩種仿真方法均能實現汽車操縱穩定性和舒適性要求。基因算法優化在NLPQL優化基礎上實現了更高精度。 參考文獻: [1]朱學文,詹建軍,何小新.基于Pro/E與ADAMS的汽車懸掛仿真分析[J],機械與電子,2005(8):70. [2]周愛國,王聞莉,陸亮,等.基于AMESim中Modelica 模塊的汽車電動助力轉向系統仿真[J].機床與液壓,2011(11).
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
能源工程(2022年1期)2022-03-29 01:06:28
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
今日農業(2020年16期)2020-12-14 15:04:59
消費導刊(2018年8期)2018-05-25 13:20:08
家庭影院技術(2018年4期)2018-05-09 07:07:41
電子制作(2017年20期)2017-04-26 06:57:45