基于CC2630輔助定位的飛行控制器設計
2017-08-07 14:27:36賈霄強梁斌李其豪于秋芳
電子測試 2017年10期
賈霄強,梁斌,李其豪,于秋芳
(天津師范大學電子與通信工程學院,天津,300387)
基于CC2630輔助定位的飛行控制器設計
賈霄強,梁斌,李其豪,于秋芳
(天津師范大學電子與通信工程學院,天津,300387)
針對小型航模飛機在低空小區域進行飛行訓練時,需要較高精度的位置信息作為輔助。設計了基于CC2630輔助定位的飛行控制器。該控制器其能夠采集三軸陀螺儀、三軸加速度、地磁信息、海拔高度、GPS位置信息等,利用RSSI算法進行位置計算,實現了較高精度的位置輸出。
陀螺儀;加速度;地磁信息;CC2630
0 引言
小型固定翼航模飛機或小型四軸飛行器,在低空小區域起飛、降落和飛行訓練時,需要較高精度的定位數據。而GPS信號容易受到干擾,同時其定位精度在10m量級,誤差較大。不能滿足我們在有限的空間里進行安全的飛行訓練,故我們依托于ZigBee網絡定位技術,利用CC2630芯片設計了機載飛行控制器。
1 飛行控制器整體設計
飛行控制器主要由主控芯片CC2630及其外圍電路、電源管理單元、九軸磁力傳感器BMX055、溫濕度氣壓傳感器BME280、GPS+北斗+GPRS模塊HLK-GS2503和存儲器組成,將采集到多種信息進行解析和融合后給出PWM驅動信號,提供給電調驅動電機或舵機。其整體架構如圖1所示。
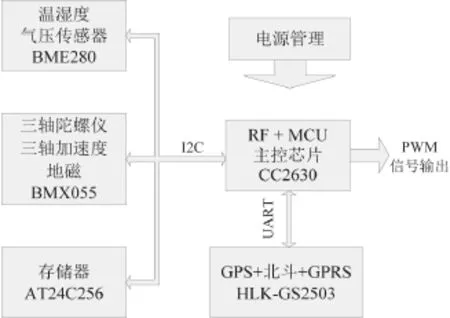
圖1 飛行控制器整體架構圖
其溫濕度氣壓傳感器和九軸磁力傳感器是由I2C串行總線進行地址分配和數據讀取的,總線速率為400KHz。GPS模塊直接通過串口和主控芯片的UART單元連接,完成命令寫入和定位信息讀取。
2 控制器硬件單元設計
主控單元由TI公司生產的CC2630及其外圍電路構成。它含有一個32位ARM? Cortex?-M3內核、48MHz的時鐘速度、128KB系統內可編程閃存、28KB系統SRAM、四個通用定時器、8路200MSPS速率的12位模數轉換器、UART接口、I2C接口、實時時鐘等外設功能。
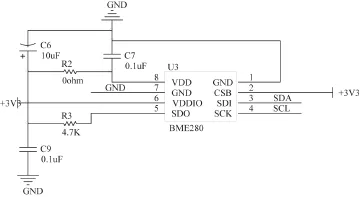
圖2 溫濕度氣壓傳感器BME280電路原理圖
溫濕度氣壓傳感器BME280電路原理如圖2所示,它和CC2630的硬件I2C接口相連,其SDA引腳為數據端,SCL引腳為時鐘端。VDDIO引腳為數字電源,連接C9為0.1uF退耦電容,保證芯片不受電源電壓波動的影響。VDD引腳為模擬電源,除了鏈接C7為0.1uF電容外還接入了0歐姆電阻R2,將其視為電感的作用,抑制該引腳的電流波動。
九軸磁力傳感器BMX055電路原理如圖3所示。它也和CC2630的硬件I2C接口相連,其11腳SDx為數據端,第9腳SCx為時鐘端。第13腳VDDIO為數字電源,連接C10為0.1uF退耦電容,保證芯片不受電源電壓波動的影響。第3腳VDD為模擬電源,除了鏈接C4為0.1uF電容外還接入了0歐姆電阻R1,將其視為電感的作用,抑制該引腳的電流波動。

圖3 九軸磁力傳感器BMX055電路原理圖
3 軟件設計
基于CC2630輔助定位的飛行控制器,在ZigBee定位網絡里屬于協調器節點,需要地面區域內多個路由節點與其通信的信號強度來計算出相對位置,其運行工作流程如圖4所示。
4 測試數據及結論
飛行控制器實現了對陀螺儀、加速度、地磁信號的采集,能根據這些數據提供可用的PWM信號。
在ZigBee網絡位置確定過程中,是單獨做的測試。將6支路由節點以20m的距離分布在一個矩形區域內。人為移動協調器節點,觀察顯示器上輸出的計算位置增量信息和實際的物理位置變化信息進行對比,如表1所示。

圖4 飛行控制器軟件流程圖
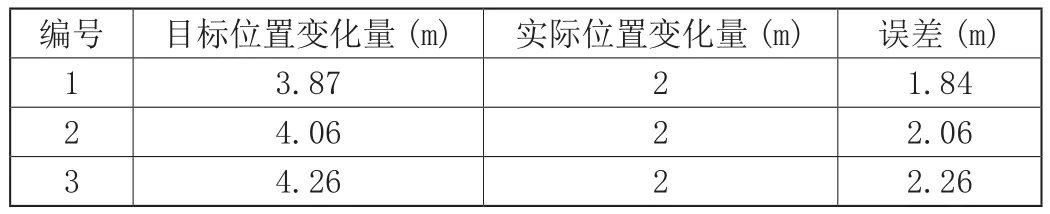
表1 位置變化數據表
根據測試數據,該設備的定位誤差平均值在2米左右,實現了設計目標。
[1] TI.CC2630 User’s Guide[R/OL].[2016-07].http:// www.ti.com.cn/cn/lit/ds/symlink/cc2630.pdf.
Design of flight controller based on CC2630 aided positioning
Jia Xiaoqiang,Liang Bin,Li Qihao,Yu Qiufang
(School of electronic and communication engineering, Tianjin Normal University, Tianjin,300387)
In order to carry out the flight training of small model aircraft in low altitude area, it is necessary to use high precision position information as an aid A flight controller based on CC2630 aided positioning is designed. The controller can collect three axis gyro, the acceleration of the three axis, the geomagnetic information, the altitude, the GPS position information and so on. The RSSI algorithm is used to calculate the position
gyroscope; acceleration; geomagnetic information; CC2630
大學生創新創業訓練計劃項目(201510065036 )。
猜你喜歡
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
中華手工(2017年2期)2017-06-06 23:00:31
Coco薇(2017年5期)2017-06-05 08:53:16
中外會展(2014年4期)2014-11-27 07:46:46
舒適廣告(2008年9期)2008-09-22 10:02:48
建筑創作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32
