基于DSP+FPGA的SINS/GPS組合導航系統設計?
2017-08-01 13:49:49閆強程國建
計算機與數字工程 2017年7期
閆強 程國建
(1.西安石油大學西安710065)(2.中興通訊股份有限公司西安710065)
基于DSP+FPGA的SINS/GPS組合導航系統設計?
閆強1,2程國建1
(1.西安石油大學西安710065)(2.中興通訊股份有限公司西安710065)
小型化、低成本組合導航系統是現今慣性導航系統的重要發展趨勢,論文設計了基于DSP+FPGA技術的SINS/ GPS組合導航系統。完成了計算機硬件電路的設計,用DSP+FPGA替代了原微處理器作為核心處理器工作模式的同時,設計了捷聯解算算法,實現了系統通訊、數據采集以及導航數據解算的功能,并通過初始對準試驗對設計方案進行了驗證。
SINS/GPS;組合導航系統;DSP+FPGA;捷聯解算算法
Class NumberTN96.2
1 引言
SINS/GPS組合導航是軍用領域主要的導航方法[1~8]。作為外部信息源的GPS與捷聯慣性導航系統(SINS)結合的組合導航系統可以解決它們單獨工作的缺陷,相互彌補。SINS在很大程度上彌補了GPS信號易受干擾的缺陷,GPS則給出了SINS所需的外界校正信息,兩者組合可實現系統在滿足小型化、低成本要求的同時完成較高精度的長航時導航任務。計算機電路作為組合導航系統的大腦,要同時完成外部大量數據的采集、捷聯慣性導航數據的解算、多數據的融合與計算結果的輸出等工作。目前,大多數SINS仍采用PC104處理器,其體積大、集成度低、速度慢、實時性差,無法大批量的采集和解算數據。數字信號處理器(DSP)具有高集成度、高運算速率和高精度的特點[9~14],現場可編程門陣列(FPGA)擁有編程靈活、集成度高、設計開發周期短等特點,因此本文采用DSP+FPGA的方案實現計算機電路的設計,DSP作為導航解算和控制的核心處理器,FPGA作為輔助設備,用于實現緩沖數據、擴展端口和邏輯控制等功能。
2 系統的硬件設計
SINS/GPS組合導航系統由加速度計、陀螺儀、電源電路、計算機電路等模塊組成。計算機電路設計原理圖如圖1所示,包含最小系統電路與數據采集電路兩部分。其中,加速度計采用石英加速度計,陀螺儀采用三軸一體激光陀螺儀。
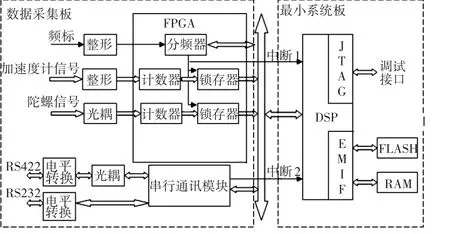
圖1計算機電路整體設計框圖
2.1 DSP最小系統
DSP最小系統主要完成組合導航解算功能[15~17],包括TMS320C6713、外擴FLASH存儲器、外擴SDRAM存儲器以及電源電路、時鐘電路、復位電路、JTAG仿真接口等幾大部分。除了獨立組成一個子系統外,DSP最小系統還必須提供與FPGA的接口,完成與外界的信息交換。圖2為DSP最小系統的結構示意圖。
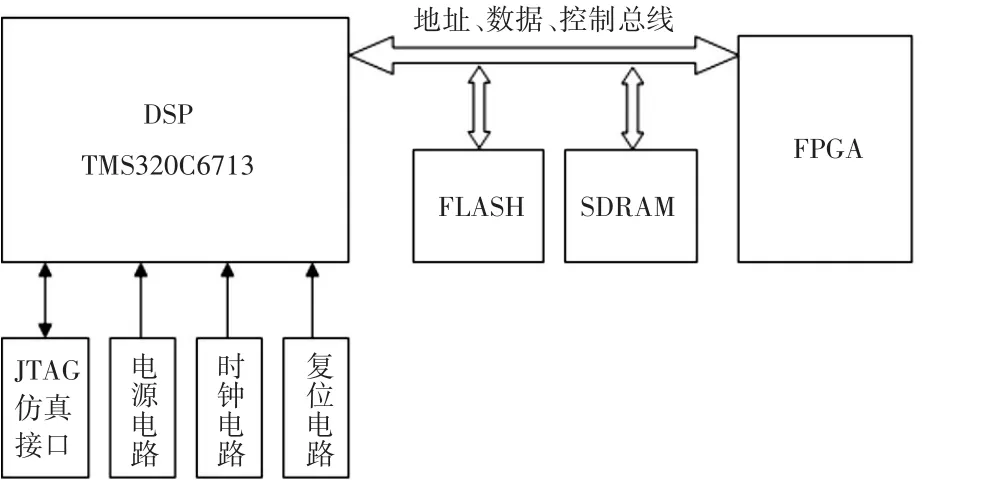
圖2DSP最小系統框圖
其中,復位電路完成整個系統的復位操作,復位時間大于DSP TMS320C6713芯片10個時鐘周期,采用手動復位和系統上電復位兩種模式。時鐘電路主要由鎖相環(PLL)及鎖相環控制器、鎖相環電源濾波電路和時鐘發生電路三個部分組成。鎖相環電源濾波電路給鎖相環控制器提供穩定的電源,鎖相環控制器將外部輸入的標準時經過倍頻和分頻后產生DSP內核時鐘、EMIF總線時鐘和兩路外部輸出時鐘。最小系統板中使用三種電源電壓:+5V為電壓調整芯片輸入電壓,是整個系統的電源,+1.2V為DSP核心電源,+3.3V為DSP I/O口、PLL、FLASH和SDRAM電源,根據芯片的實際電氣特性分析,電源電路分別選取了LD1117#12和LD1117#33兩個具有固定輸出電壓的電源芯片來提供DSP芯片所需的核電壓和I/O口電壓。
2.2 數據采集系統
數據采集電路的功能是定時采集3路陀螺、3路加速度計的輸入信號,并對輸入的信號進行計數和鎖存處理。通過串口接收GPS信號并與外界交換信息。數據采集電路主要包括輸入信號整形、輸入信號光耦隔離、串口通訊、FPGA模塊等部分。除了獨立完成組合導航數據采集功能外,還必須提供與DSP的接口,完成將數據采集結果上傳給DSP的任務。圖3為數據采集電路的結構示意圖。
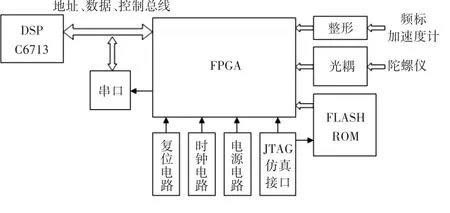
圖3數據采集電路框圖
數據采集電路的復位電路和時鐘電路與DSP最小系統的相同。數據采集系統需要對3路加速度計的輸入信號和1路頻標輸入信號進行整形處理,使輸入信號滿足TTL電平標準,提高系統工作可靠性。本系統采用RC濾波加施密特觸發器實現對輸入信號進行整形的目的。FPGA上電后通過專用引腳從PROM芯片中獲取程序對其內部實施編程操作,完成對FPGA的配置。電源電路有三種電源電壓,+5V是整個電路板的輸入電壓,+1.8V是FPGA芯片電源電壓,+3.3V是施密特觸發器、光耦芯片輸出端上拉電源、串口芯片電源和PROM芯片電源。
3 系統的軟件設計
計算機電路的功能需要通過軟件設計進行實現。分別在最小系統電路和數據采集電路兩個硬件平臺進行[18~20]。
3.1 最小系統電路軟件設計
最小系統電路主要完成導航數據的融合處理。其軟件主要實現最小系統的引導裝載以及將從數據采集電路得到的數據進行導航解算,并保存相關數據的功能。其中,主程序部分實現整個導航算法,包括SINS的誤差補償、初始對準、捷聯慣性導航算法和組合導航融合算法等程序模塊。主程序的編程語言采用C語言和匯編語言。SINS導航算法采用C語言編寫,并嵌入了硬件電路控制的匯編語言。這樣的編程方式有效利用了C語言的高效可讀性,又利用了匯編語言的準確性、及時性,提高了程序的執行速度和可移植性,便于實現硬件的控制。
SINS/GPS組合導航系統初始對準主要任務是在對SINS進行誤差補償后為捷聯解算算法確定載體坐標系和真實導航坐標系之間的捷聯矩陣初始值,為后續組合導航算法提供準確的基準。初始對準流程圖如圖4所示。SINS系統初始對準分為粗對準和精對準兩個過程。粗對準用來縮短對準時間,它要求在較短的時間內粗略地計算出初始姿態矩陣,在此基礎上再進一步進行精對準,以達到對準的精度要求。
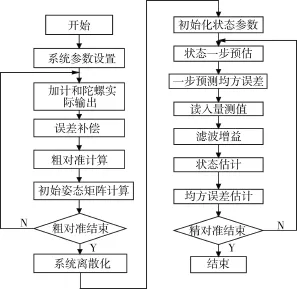
圖4初始對準流程圖
3.2 數據采集電路軟件設計
數據采集電路FPGA的設計流程有設計輸入、功能仿真、綜合、實現、時序仿真、配置下載六個步驟,主要實現譯碼器、分頻器、計數器、鎖存器等功能,其中加速度計的計數鎖存通道同光纖陀螺儀的計數鎖存通道相似。當數據采集板開始工作時,各通道計數器分別對3路加速度計、3路陀螺的輸入脈沖信號進行計數,同時分頻器在接收到DSP輸入的計數值后對外部輸入的頻標信號進行減1計數,當分頻器數值為“0”時,向各路鎖存器發出鎖存信號,將相應的計數器數值鎖存,同時向DSP發出中斷請求信號,請求DSP讀取鎖存器中的計數值。DSP響應中斷后由譯碼器依次選通各路鎖存器,將鎖存器中的數據讀取到DSP中進行處理。程序采用比較通用的VHDL語言,程序的編寫只需直接對對象進行系統級的邏輯行為描述,從而避開具體的器件結構來進行系統的設計,它的可移植能力和多層次設計描述能力比較強。
4 試驗驗證及結果分析
SINS/GPS組合導航系統設計完成后進行初始對準試驗。實驗地點選在試驗室進行。當地緯度:34.1767°,經度:108.9511°。誤差補償完成后進行粗對準,時間為120s,可得到粗對準結束之后的三個方向上的失準角誤差為:[-0.2353°,-2.8088°,-0.7530°],即為精對準的初始失準角誤差。精對準采用靜基座條件下卡爾曼濾波方法來完成。在此設計了初始對準誤差模型的卡爾曼濾波器,將SINS的速度作為量測量,在精對準過程中采用卡爾曼濾波器來估計失準角誤差。濾波器每秒濾波一次,濾波時間總共300s。試驗結果估計圖如圖5所示。從圖中可以看出,東北天三個方向失準角的估計效果較好,收斂速度較快,其時間和精度均可滿足實際使用要求。
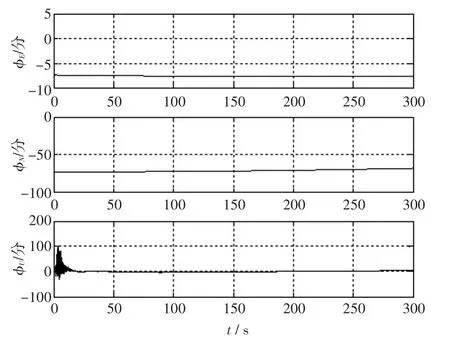
圖5失準角誤差估計圖
5 結語
本文設計完成了一種以DSP+FPGA為核心的SINS/GPS組合導航系統,用DSP+FPGA技術替代傳統使用的微處理器作為核心處理器的工作模式,采用工程上較為實用的卡爾曼濾波方法進行初始對準試驗,有效地驗證了DSP最小系統和FPGA數據采集系統功能的有效性以及設計靈活性和高拓展性,實現了在保持系統精度的同時小型化、低成本的設計目的。
[1]柳貴福,張樹俠.光纖陀螺零漂數據濾波方法的研究[J].中國慣性技術學報,2001,9(4):66. LIU Guifu,ZHANG Shuxia.Gyro random drift data fi?ber-optic gyroscope zero drift data filtering method re?search[J].Journal of Chinese Inertial Technology,2001,9(4):66.
[2]R.B.Vaganov,B.G.Klevitskiy.Sagnac Effect in a Fi?ber-ring Interferometer[J].Radio Engineering and Elec?tronic Physics,1984,29(3):149-153.
[3]H.J.Arditty,H.C.Lefovre.Sagnac Effect in Fiber Gyro?scopes[J].Optics Letters,1981,6:401-403.
[4]董緒榮,張守信,華仲春.GPS/SINS組合導航定位及其應用[M].長沙:國防科技大學出版社,1998:33-54. DONG Xurong,ZHANG Shouxin,HUA Zhongchun.GPS/ SINS integrated navigation positioning and its application[M].Changsha:National university of defense technology press,1998:33-54.
[5]于旭東,張鵬飛,謝元平.單軸旋轉慣導系統軸向陀螺漂移預測方法[J].強激光與粒子束,2013,22(4):399-402. YU Xudong,ZHANG Pengfei,XIE Yuanping.Uniaxial ro?tating inertial navigation system prediction method of axial gyro drift[J].High Power Laser and Particle Beams,2013,22(4):399-402.
[6]黃磊,王巍.閉環光纖陀螺的輸出誤差特性研究[J].中國慣性技術學報,2005,13(3):52-55. HUANG Lei,WANG Wei.Closed loop of fiber-optic gyro?scope output error characteristics research[J].Journal of Chinese Inertial Technology,2005,13(3):52-55.
[7]Donohodl.De-noising by soft-thresholding[J].IEEE Transactions on Information Theory,2005,41(3):613-626.
[8]Daubechies.Orthogonal bases of compactly sup-ported wavelets[J].Comm Pure Appl Math,1998(41):909-996.
[9]張濤,徐曉蘇.基于小波和人工智能的艦載捷聯系統動基座對準[J].吉林大學學報,2010,40(2):549-554. ZHANG Tao,XU Xiaosu.Based on wavelet and artificial intelligence carrier moving base alignment strapdown sys?tem[J].Journal of Jilin university,2010,40(2):549-554.
[10]JIANG Y P.Error analysis of analytic coarse alignment methods[J].IEEE Transactions on Aerospace and Elec?tronic Systems,1998,34(1):334-337.
[11]Kevin J.Walchko,Michael C.Nechyba,Eric Schwartz,et al.Embedded Low Cost Inertial Navigation System[C]// Florida conference on Recent Adwances in Robotics,2003.
[12]張巖.激光陀螺捷聯慣導系統數據采集電路分析與設計[D].北京:國防科技大學,2005:5-9. ZHANG Yan.Laser gyro strap down inertial navigation system,data acquisition circuit analysis and design[D]. Beijing:National University of Defense Technology,2005:5-9.
[13]宋東清.基于DSP的導航計算機系統設計[D].哈爾濱:哈爾濱工程大學,2006:35-48. SONG Dong qing.The navigation computer system de?sign based on DSP[D].Harbin:Harbin Engineering Uni?versity,2006:35-48.
[14]薛雷,張金藝,彭之威.DSP原理及應用教程[M].北京:清華大學出版社,2007:44-45. XUE Lei,ZHANG Jinyi,PENG Zhiwei.The principle and application of DSP tutorial[M].Beijing:Tsinghua university press,2007:44-45.
[15]Li Xuyou,Zhang Chen,He Zhouet al..Temperature per?formance research of fiber coil in fiber optic gyroscope based on polarization coupling theory[J].Chinese J.La?sers,2010,37(4):1053-1057.
[16]王念旭等.DSP基礎與應用系統設計[M].北京:北京航空航天大學出版社,2000:144-169. WANG Nianxu.DSP based and application system design[M].Beijing:Beijing university of aeronautics and astro?nautics press,2000:144-169.
[17]賈子申,李淑清,王冠雅.基于FPGA的UART控制器設計[J].電子測量技術,2008:31(3):80-91. JIA zishen,LI Shuqing,WANG Guanya.UART control?ler design based on FPGA[J].Electronic measurement techniques.2008:31(3):80-91.
[18]秦永元.慣性導航[M].北京:科學出版社,2006:203-204. QIN Yongyuan.Inertial navigation[M].Beijing:Science press,2006:203-204.
[19]Mallat S.A Theory for Multiresolution Signal Decomposi?tion[C]//The Wavelet Representation.IEEE Trans.On Pattern Anal.Mach Intell,1989,11(7):674-691.
[20]LI Qing-wu,HE Chun-yuan.A new thresholding method in wavelet packet analysis for image denoising[C]//Pro?ceedings of the IEEE International Conference on Mecha?tronics and Automation,2006:2074-2078.
Design of Strapdown Inertial Navigation System Based on DSP/ FPGA
YAN Qiang1,2CHENG Guojian1
(1.Xi'an Shiyou University,Xi'an710065)(2.ZTE Corporation,Xi'an710065)
That the integrated navigation system has the miniaturization and low cost is an important development trend of cur?rent.This paper designed the SINS/GPS integrated navigation system based on technology of DSP+FPGA.It designed the hardware circuit,using DSP+FPGA to replace the original microprocessor as the core processor working mode.At the same time,the strap?down decoding algorithm was designed.The design implemented the function about the system communication,data acquisition and navigation data decoding,and were verified by the initial alignment test.
SINS/GPS,integrated navigation system,DSP+FPGA,strapdown decoding algorithm
TN96.2
10.3969/j.issn.1672-9722.2017.07.024
2017年1月3日,
2017年2月19日
程國建,男,教授,博士,研究方向:計算智能、機器學習、模式識別、數據挖掘、圖像處理、智能油藏工程、商業智能、清潔能源及CO2封存及利用等。閆強,男,碩士研究生,研究方向:計算機應用技術研究。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
藝術啟蒙(2018年7期)2018-08-23 09:14:18
電子制作(2018年11期)2018-08-04 03:25:42
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
