西門子S7-1200在自動(dòng)化線的運(yùn)動(dòng)控制及應(yīng)用
2017-07-31 18:46:42姜志艷
電子工業(yè)專用設(shè)備 2017年3期
姜志艷
(中國(guó)電子科技集團(tuán)公司第二研究所,山西太原030024)
西門子S7-1200在自動(dòng)化線的運(yùn)動(dòng)控制及應(yīng)用
姜志艷
(中國(guó)電子科技集團(tuán)公司第二研究所,山西太原030024)
利用TIA Portal平臺(tái)結(jié)合CPU S7-1200的“運(yùn)動(dòng)控制”功能,通過脈沖發(fā)生器(PTO/PWM)的高速脈沖接口控制步進(jìn)電機(jī)和伺服電機(jī),利用內(nèi)置PROFINET接口實(shí)現(xiàn)多臺(tái)1200之間I-Device(智能設(shè)備),可用于4軸以上高速脈沖輸出,實(shí)現(xiàn)多軸伺服電機(jī)及步進(jìn)電機(jī)的精確控制。
脈沖發(fā)生器;運(yùn)動(dòng)控制;智能設(shè)備
S7-1200CPU能夠提供一個(gè)脈沖輸出和一個(gè)方向輸出,通過脈沖接口對(duì)步進(jìn)電機(jī)驅(qū)動(dòng)器或伺服電機(jī)驅(qū)動(dòng)器進(jìn)行控制,脈沖輸出為驅(qū)動(dòng)器提供電機(jī)運(yùn)動(dòng)所需的脈沖,方向輸出則用于控制驅(qū)動(dòng)器的行進(jìn)方向。本系統(tǒng)采用PROFINET接口實(shí)現(xiàn)兩臺(tái)CPU1214的智能連接,第一臺(tái)CPU1214作為master主站用于上位機(jī)的數(shù)據(jù)交互及四臺(tái)步進(jìn)電機(jī)的運(yùn)動(dòng)控制,第二臺(tái)CPU1214作為slave從站用于伺服電機(jī)的精確運(yùn)動(dòng)控制。
1 系統(tǒng)總體方案
在本傳輸系統(tǒng)中上位機(jī)采用具有以太網(wǎng)網(wǎng)口的上位系統(tǒng),這樣方便整個(gè)系統(tǒng)的遠(yuǎn)程控制,主從CPU均采用晶體管輸出的控制器。在此系統(tǒng)中主要實(shí)現(xiàn)I-Device(智能設(shè)備)的控制及軸工藝控制。
1.1 各部分功能
功能如圖1所示,上位機(jī)與主CPU進(jìn)行通信連接,實(shí)現(xiàn)各種功能的轉(zhuǎn)換及數(shù)據(jù)交換,主PLC控制I/O輸入輸出設(shè)備及4臺(tái)步進(jìn)電機(jī)的運(yùn)動(dòng)控制,從PLC的功能實(shí)現(xiàn)兩臺(tái)伺服電機(jī)的運(yùn)動(dòng)控制,同時(shí)通過I-Device與主PLC實(shí)現(xiàn)數(shù)據(jù)交換。

圖1 系統(tǒng)功能簡(jiǎn)圖
1.2 系統(tǒng)硬件設(shè)計(jì)
系統(tǒng)需配備具有Ethernet連接的網(wǎng)口模塊,工控機(jī)及觸摸屏皆可,硬件系統(tǒng)由兩臺(tái)CPU1214來實(shí)現(xiàn),如圖2所示。
其中PLC_1為主CPU可根據(jù)系統(tǒng)配置相應(yīng)的IO擴(kuò)展模塊,最多一個(gè)PLC可配置8個(gè)擴(kuò)展模塊如圖3。本系統(tǒng)配置6個(gè)IO擴(kuò)展模塊。
電機(jī)與PLC功能關(guān)系如圖4所示。
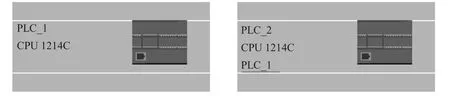
圖2 系統(tǒng)網(wǎng)絡(luò)拓?fù)?/p>

圖3 PLC_1硬件組態(tài)
2 系統(tǒng)方案的實(shí)現(xiàn)
2.1 I-Device(智能設(shè)備)的控制
S7-1200智能IO設(shè)備(I-Device)是非常實(shí)用的功能,不需占用通信資源,也不需要編寫復(fù)雜程序。本系統(tǒng)采用兩臺(tái)S7-1200系列的CPU1214C作為硬件項(xiàng)目的主CPU,可以實(shí)現(xiàn)與上位機(jī)及系統(tǒng)其他主CPU通訊,本系統(tǒng)全部采用網(wǎng)口連接因此采用5口交換機(jī)。在博途軟件的同一項(xiàng)目中組態(tài)兩個(gè)硬件項(xiàng)目,分別是PLC_1和PLC_2,其中PLC_1作為IO-Controller,PLC_2作為IO-Device,見圖5所示。
網(wǎng)絡(luò)連接完成后,需要對(duì)PLC_2進(jìn)行設(shè)置如圖6,開辟一塊存儲(chǔ)空間作為數(shù)據(jù)傳輸區(qū)根據(jù)程序需要進(jìn)行傳輸區(qū)設(shè)置,根據(jù)系統(tǒng)需要建立兩個(gè)傳輸區(qū),傳輸區(qū)區(qū)不能占用已用的IO地址,PCL2的輸入?yún)^(qū)對(duì)應(yīng)的為PLC1的輸出區(qū),PCL2的輸出區(qū)對(duì)應(yīng)的為PLC1的輸入?yún)^(qū),這兩個(gè)傳輸區(qū)分別用于接收數(shù)據(jù)及發(fā)送數(shù)據(jù),在本系統(tǒng)中傳輸區(qū)字節(jié)長(zhǎng)度為80個(gè)字節(jié),在PLC2中I16-I96對(duì)應(yīng)的為PLC1中的Q16-Q96,來實(shí)現(xiàn)兩個(gè)CPU的數(shù)據(jù)交互。

圖4 電機(jī)與PLC功能關(guān)系

圖5 S7-1200不同CPU網(wǎng)絡(luò)連接

圖6 PLC1與PLC_2的智能連接配置
根據(jù)程序內(nèi)容將所需內(nèi)容賦給傳輸區(qū),Master PLC_1就會(huì)接收相應(yīng)的數(shù)據(jù) 如圖7所示,將PLC2中伺服電機(jī)當(dāng)前值,賦給QD18,在PLC1中ID18就是伺服電機(jī)當(dāng)前值,其他交換數(shù)據(jù)也需在程序中定義,通過這種智能轉(zhuǎn)換來實(shí)現(xiàn)數(shù)據(jù)交換。
2.2 S7-1200實(shí)現(xiàn)軸工藝的運(yùn)動(dòng)控制
在TIA Portal中,可以組態(tài)“軸”和“命令表”工藝對(duì)象。CPU S7-1200可以使用這些工藝對(duì)象控制用于控制驅(qū)動(dòng)器的脈沖和方向輸出。通過脈沖接口控制步進(jìn)電機(jī)和伺服電機(jī)運(yùn)行的運(yùn)動(dòng)控制功能,運(yùn)動(dòng)控制功能負(fù)責(zé)對(duì)驅(qū)動(dòng)器進(jìn)行監(jiān)控。在設(shè)備組態(tài)期間,可以在“屬性”(Properties)選項(xiàng)卡的脈沖發(fā)生器(PTO/PWM)中,選擇板載CPU輸出。根據(jù)硬件配置完成如圖8所示的步進(jìn)電機(jī)及伺服電機(jī)的軸設(shè)置。

圖7 智能連接的程序轉(zhuǎn)換

圖8 S7-1200與電機(jī)的控制圖
2.2.1 脈沖接口的工作原理
根據(jù)步進(jìn)電機(jī)的設(shè)置,每個(gè)脈沖會(huì)使步進(jìn)電機(jī)移動(dòng)特定角度。本系統(tǒng)中要求精確控制的步進(jìn)電機(jī)分辨率設(shè)置將步進(jìn)電機(jī)設(shè)置為每轉(zhuǎn)10 000個(gè)脈沖,電機(jī)每轉(zhuǎn)的距離根據(jù)機(jī)械尺寸可以自己定義,步進(jìn)電機(jī)每轉(zhuǎn)設(shè)為60 mm,如圖9步進(jìn)電機(jī)的速度通過每單位時(shí)間的脈沖數(shù)來確定。
(此處所做的說明同樣適用于帶脈沖接口的伺服電機(jī))
2.2.2 軸工藝設(shè)置
包含機(jī)械的物理驅(qū)動(dòng)器在TIA Portal中映射為“軸”工藝對(duì)象。為此,需要使用以下參數(shù)組態(tài)“軸”工藝對(duì)象:
(1)要使用的PTO(Pulse Train Output,脈沖串輸出)的選擇選項(xiàng)和驅(qū)動(dòng)器接口的組態(tài);
(2)機(jī)械參數(shù)和驅(qū)動(dòng)器(機(jī)器或系統(tǒng))的傳動(dòng)比參數(shù);
(3)位置監(jiān)視參數(shù)、動(dòng)態(tài)參數(shù)和回原點(diǎn)參數(shù)。

圖9 電機(jī)的速度對(duì)比
“軸”工藝對(duì)象的組態(tài)保存在該工藝對(duì)象(數(shù)據(jù)塊)中。該數(shù)據(jù)塊也將作為用戶程序和CPU固件間的接口。用戶程序運(yùn)行期間,當(dāng)前的軸數(shù)據(jù)保存在該工藝對(duì)象的數(shù)據(jù)塊中(見圖10)。其他運(yùn)動(dòng)參數(shù)根據(jù)系統(tǒng)功能不同來完成設(shè)置。
2.2.3 用戶程序
可以使用用戶程序啟動(dòng)CPU固件中的運(yùn)動(dòng)控制指令作業(yè)。包括以下用于控制軸的作業(yè):
·絕對(duì)定位軸·相對(duì)定位軸
·以設(shè)定的速度移動(dòng)軸
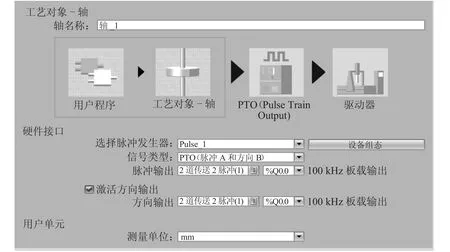
圖10 軸工藝設(shè)置
·按移動(dòng)順序運(yùn)行軸作業(yè)
·在點(diǎn)動(dòng)模式下移動(dòng)軸
·停止軸
·參考軸;設(shè)置參考點(diǎn)
·確認(rèn)錯(cuò)誤
可以通過運(yùn)動(dòng)控制指令的輸入?yún)?shù)和軸組態(tài),確定命令參數(shù)。該指令的輸出參數(shù)將提供有關(guān)狀態(tài)和所有命令錯(cuò)誤的最新信息。啟動(dòng)軸命令之前,必須使用運(yùn)動(dòng)控制指令“MC_Power”啟用軸。可以使用工藝對(duì)象的變量讀取組態(tài)數(shù)據(jù)和當(dāng)前軸數(shù)據(jù)。可以通過用戶程序更改工藝對(duì)象的單個(gè)可更改變量(例如,當(dāng)前加速度)。
在本系統(tǒng)中自動(dòng)控制狀態(tài)下步進(jìn)電機(jī)只要采用兩種方式,一種是高速下走相對(duì)定位,停止信號(hào)主要取決于定位完成,這種控制方法在沒有外力干擾的情況下可以實(shí)現(xiàn)精確定位;另外一種采用定位+速度的混合運(yùn)動(dòng)模式,停止信號(hào)采用外部傳感器信號(hào),這種控制方法既可以保證傳輸機(jī)構(gòu)的運(yùn)轉(zhuǎn)速度,又能控制停止位置。
當(dāng)軸已正確啟用后,可以使用運(yùn)動(dòng)控制指令“MC_Home”,將軸坐標(biāo)與實(shí)際的物理驅(qū)動(dòng)器位置進(jìn)行匹配。軸的絕對(duì)定位需要?dú)w位(見圖11)。可執(zhí)行以下類型的歸位:
(1)主動(dòng)歸位(Mode=3)動(dòng)執(zhí)行歸位步驟。檢測(cè)到回原點(diǎn)開關(guān)時(shí),軸即回原點(diǎn)。
(2)直接絕對(duì)歸位(Mode=0)將當(dāng)前的軸位置設(shè)置為參數(shù)“Position”的值。
運(yùn)動(dòng)控制指令“MC_MoveAbsolute”啟動(dòng)軸定位運(yùn)動(dòng)以將其移動(dòng)到某個(gè)絕對(duì)位置。通過運(yùn)動(dòng)控制指令“MC_MoveRelative”,啟動(dòng)相對(duì)于起始位置的定位運(yùn)動(dòng)。
·已正確組態(tài)工藝對(duì)象“軸”
·軸已啟用
·軸已歸位
圖12為絕對(duì)定位及相對(duì)定位的指令及功能圖,可以根據(jù)程序需要進(jìn)行速度模式的程序編寫。
圖13所示流程為伺服電機(jī)絕對(duì)定位完成后,啟動(dòng)步進(jìn)電機(jī)運(yùn)行信號(hào),轉(zhuǎn)相對(duì)定位,當(dāng)定位完成,收到定位完成信號(hào)轉(zhuǎn)化為速度模式,校正后轉(zhuǎn)相對(duì)定位的例子。
2.2.4 與I-Device連接結(jié)合使用
伺服電機(jī)的運(yùn)動(dòng)參數(shù)通過I-Device連接由PLC_2傳送,再由PLC_1向PLC_2發(fā)送命令執(zhí)行相應(yīng)動(dòng)作。如圖14所示,PLC_1程序中將各種絕對(duì)定位動(dòng)作的執(zhí)行作為條件輸出絕對(duì)定位的啟動(dòng)Q16.6,傳輸區(qū)Q16.6對(duì)應(yīng)在PLC_2中I16.6,作為絕對(duì)運(yùn)動(dòng)的啟動(dòng)條件。
當(dāng) PLC_1滿足條件輸出 Q16.6時(shí),PLC_2中的I16.6置1,軸 1執(zhí)行絕對(duì)定位動(dòng)作如圖15所示。

圖11 軸的絕對(duì)定位歸位

圖12 絕對(duì)定位及相對(duì)定位功能圖
當(dāng)PLC_2絕對(duì)定位完成后,輸出定位完成信號(hào)Q16.5,同時(shí)PLC_1對(duì)應(yīng)的I16.5收到定位完成信號(hào),可以作為下一個(gè)動(dòng)作執(zhí)行的信號(hào)。其他伺服動(dòng)作均可以按照此映射實(shí)現(xiàn)。
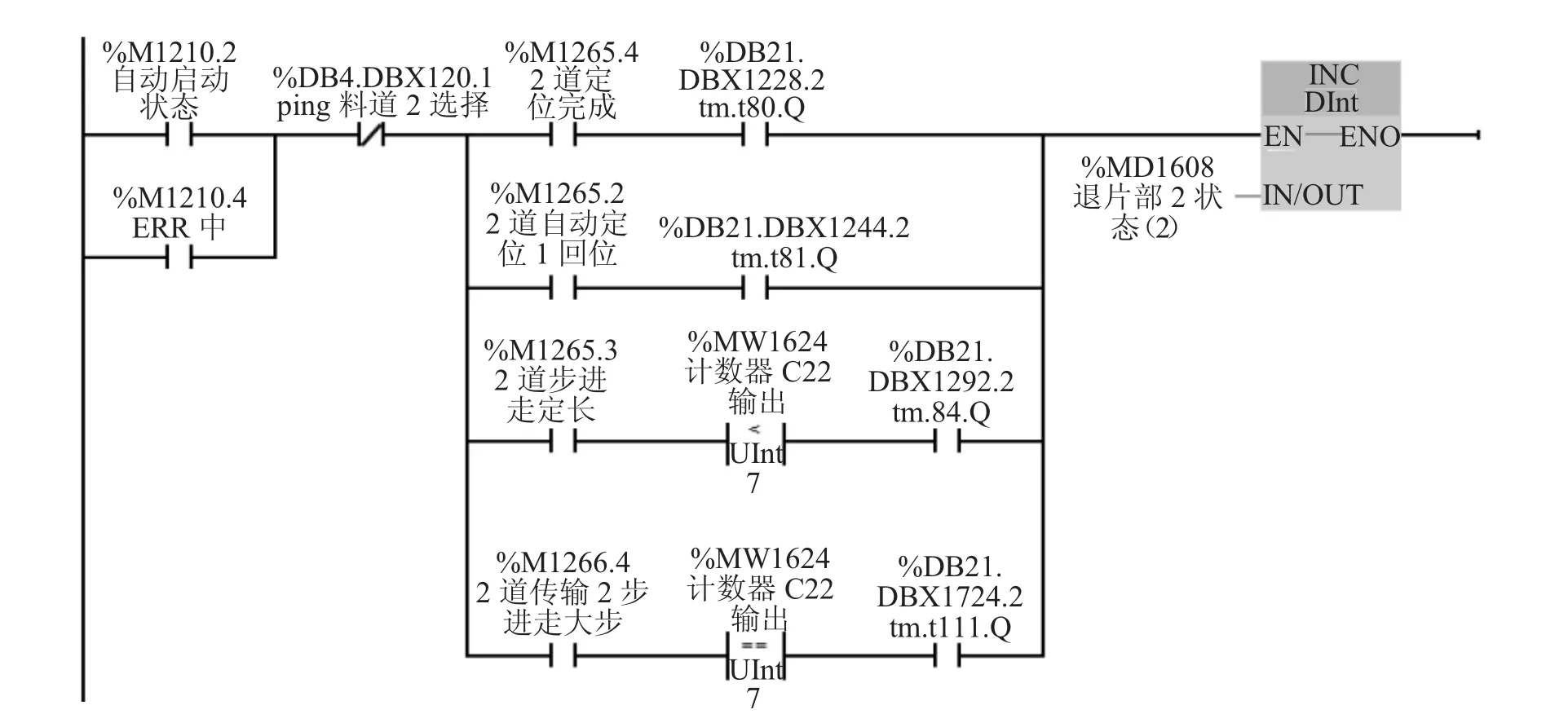
圖13 絕對(duì)定位轉(zhuǎn)相對(duì)定位
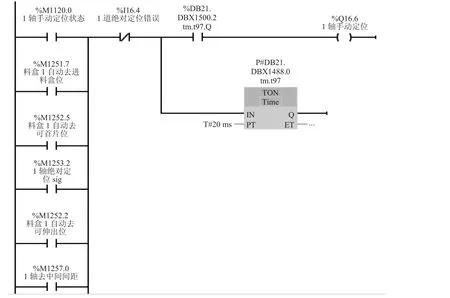
圖14 PLC_1發(fā)送命令PLC_2執(zhí)行動(dòng)作
3 結(jié) 論
S7-1200用于運(yùn)動(dòng)控制靈活、功能強(qiáng)大,可滿足各種各樣設(shè)備的自動(dòng)化需求,包含布爾邏輯、計(jì)數(shù)、定時(shí)、復(fù)雜數(shù)學(xué)運(yùn)算以及與其它智能設(shè)備的通信。通信接口(CM、CP或CB)支持多種協(xié)議,如點(diǎn)對(duì)點(diǎn) (PTP)協(xié)議、Modbus協(xié)議、USS協(xié)議和GPRS(調(diào)制解調(diào)器)協(xié)議、安全CP協(xié)議和遠(yuǎn)程控制CP協(xié)議,能滿足不同的應(yīng)用需求。

圖15 軸1執(zhí)行絕對(duì)定位
[1] 西門子(中國(guó))有限公司.深入淺出西門子S7-1200 [M].北京:航空航天大學(xué)出版社,2009.
[2] 廖常初.可編程控制器應(yīng)用技術(shù)[M].2版.重慶:重慶大學(xué)出版社,1998.
Motion Control and Application of Siemens S7-1200 in Automatic Line
JIANG Zhiyan
(The 2ndResearch Institute of CETC,Taiyuan 030024,China)
This article mainly uses the TIA Portal platform to control the CPU S7-1200"motion control"function,through the pulse generator(PTO/PWM)high-speed pulse interface control stepper motor and servo motor,the use of built-in PROFINET interface to achieve multiple between 1200 -Device (intelligent device),can be used for more than 4-axis high-speed pulse output,multi-axis servo motor and stepper motor to achieve precise control.
PTO/PWM;PROFINET interface;I-Device(intelligent device)
TM301.2
B
1004-4507(2017)03-0066-08
姜志艷(1980-),女,黑龍江佳木斯市人,工程師,本科,主要從事電子專用設(shè)備電氣控制設(shè)計(jì)。
2017-04-13
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
山東冶金(2019年6期)2020-01-06 07:45:54
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
世界農(nóng)藥(2019年2期)2019-07-13 05:55:12
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
銅業(yè)工程(2015年4期)2015-12-29 02:48:39
新疆鋼鐵(2015年3期)2015-11-08 01:59:52
