飛行試驗(yàn)遙測系統(tǒng)中相位噪聲糾正算法
2017-07-31 17:13:00王仲杰
中國測試 2017年6期
王仲杰
(中國飛行試驗(yàn)研究院,陜西 西安 710089)
飛行試驗(yàn)遙測系統(tǒng)中相位噪聲糾正算法
王仲杰
(中國飛行試驗(yàn)研究院,陜西 西安 710089)
針對航空飛行試驗(yàn)領(lǐng)域的關(guān)鍵環(huán)節(jié)——試飛遙測中存在遙測接收機(jī)的相位噪聲會嚴(yán)重影響正交頻分復(fù)用技術(shù)(orthogonal frequency division multiplexing,OFDM)系統(tǒng)信號質(zhì)量的問題,該文提出一種改進(jìn)的相位噪聲糾正算法。該算法根據(jù)空地?zé)o線信道的特點(diǎn),先對連續(xù)導(dǎo)頻位置進(jìn)行信道估計(jì)和補(bǔ)償,以便更好地壓制共同相位誤差(common phase error,CPE)在信道系數(shù)中的殘留,然后挑選符合要求的連續(xù)導(dǎo)頻完成CPE的估計(jì)和糾正,再送入信道估計(jì)模塊。通過理論分析、計(jì)算機(jī)仿真驗(yàn)證和實(shí)際應(yīng)用效果可以看出,該算法能夠較好地保證抑制相位噪聲的范圍和精度,有效降低系統(tǒng)的誤碼率,滿足航空試飛領(lǐng)域的技術(shù)要求,而且算法復(fù)雜度不高,有一定的實(shí)用價(jià)值。
飛行試驗(yàn);相位噪聲糾正;正交頻分復(fù)用技術(shù);連續(xù)導(dǎo)頻;共同相位誤差;信道估計(jì)
0 引 言
在航空飛行試驗(yàn)領(lǐng)域,試飛遙測是確保試飛安全,提高試飛效率和獲取試驗(yàn)數(shù)據(jù)的重要手段和方法,在飛行試驗(yàn)特別是新機(jī)試飛中具有非常重要的地位和作用。信息化技術(shù)的飛速發(fā)展,使航空試飛測試技術(shù)具備了良好的發(fā)展基礎(chǔ)。2004年10月由美國發(fā)起的iNET項(xiàng)目開發(fā)技術(shù),得到了廣泛的支持,并在數(shù)年內(nèi)形成了比較成熟的技術(shù)框架和技術(shù)發(fā)展路線[1]。在國內(nèi),飛行試驗(yàn)遙測領(lǐng)域一直跟蹤iNET的發(fā)展,于2012年提出了空天地一體化遙測網(wǎng)絡(luò)系統(tǒng),采用iNET通信鏈路標(biāo)準(zhǔn)中推薦的OFDM技術(shù)進(jìn)行構(gòu)建[2]。
空天地一體化遙測網(wǎng)絡(luò)系統(tǒng)在飛行試驗(yàn)應(yīng)用過程中,由于遙測接收機(jī)使用調(diào)諧器的限制,使得遙測信號混入較大的相位噪聲,導(dǎo)致試飛遙測信號質(zhì)量降低,嚴(yán)重影響試飛安全監(jiān)控和測試結(jié)果的準(zhǔn)確性;另外,由于遙測信號中OFDM調(diào)制的符號周期較長,對于載波相位噪聲尤其敏感,導(dǎo)致試飛遙測信號的誤碼率劇增,影響遙測信號質(zhì)量,因此對OFDM系統(tǒng)中相位噪聲的研究是極有必要的[3-5]。本文先從理論上對相位噪聲的成因、構(gòu)成及特點(diǎn)進(jìn)行分析,針對飛行試驗(yàn)空地?zé)o線鏈路自身的復(fù)雜性、多變性等特點(diǎn),提出了適用于航空飛行試驗(yàn)遙測的相位噪聲的估計(jì)和糾正算法。
1 OFDM系統(tǒng)中相位噪聲的影響
1.1 發(fā)射端的發(fā)射信號
圖1為基于OFDM技術(shù)的飛行試驗(yàn)遙測發(fā)射/接收系統(tǒng)的簡化框圖,通過“空地?zé)o線鏈路”連接“機(jī)載系統(tǒng)”和“地面系統(tǒng)”,而基于OFDM技術(shù)的調(diào)制/解調(diào)是在模塊“機(jī)載無線收發(fā)器”和“地面無線網(wǎng)絡(luò)收發(fā)器”中實(shí)現(xiàn)的。詳細(xì)的調(diào)制/解調(diào)流程如圖2所示,其中相位噪聲是由于本振的相位抖動引起的,包括發(fā)射端fTX和接收端fRX,但在航空試飛領(lǐng)域,考慮到機(jī)載發(fā)射機(jī)的成本優(yōu)勢,發(fā)射機(jī)產(chǎn)生的相位噪聲可以忽略不計(jì),主要考慮接收端產(chǎn)生的相位噪聲。
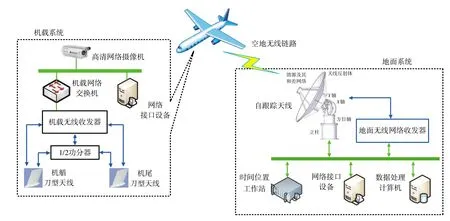
圖1 基于OFDM技術(shù)的飛行試驗(yàn)遙測發(fā)射/接收系統(tǒng)的簡化框圖

圖2 基于OFDM技術(shù)的部分調(diào)制/解調(diào)框圖

假設(shè)OFDM系統(tǒng)中有N個(gè)子載波,則發(fā)射端的發(fā)射信號sm,n可以表示為其中Am,k為第m個(gè)OFDM符號中映射到第k個(gè)子載波上的數(shù)據(jù)符號,0≤n≤N-1,由前面敘述可知,這里不考慮發(fā)射機(jī)產(chǎn)生的相位噪聲。
1.2 接收端的初始接收信號
考慮到信道響應(yīng) Hm,k、 加性噪聲 ωm,n以及調(diào)諧器帶來的相位噪聲 ejψ(t),接收端收到的基帶信號 rm,n可以表示為

其中 0≤n≤N-1。
1.3 接收端FFT后的接收信號
接收端信號經(jīng)過傅里葉變換FFT和信道均衡之后,得到的信號為

當(dāng) ψ(t)較小時(shí),ejψ(t)≈1+jψ(t),因此式(3)可以進(jìn)一步化簡得:


圖3 相位噪聲對OFDM信號的影響
式(4)的前半部分是在每個(gè)子載波上對有用信號Am,1的相位旋轉(zhuǎn),而且在同一個(gè)OFDM符號的每個(gè)子載波上相位旋轉(zhuǎn)的程度是一致的,一般稱之為CPE;式(4)的后半部分代表由于子載波間失去正交導(dǎo)致的載波間干擾(ICI)。
圖3中顯示了相位噪聲對于OFDM信號的影響。在圖3(a)中相位噪聲強(qiáng)度較低且頻帶較窄,從3(a)中可以看出,由于CPE影響,星座圖旋轉(zhuǎn)了一定角度;圖3(b)中顯示了進(jìn)行相位補(bǔ)償后的星座圖;而在圖3(c)中相位噪聲頻帶較寬,這時(shí)候ICI起了主導(dǎo)作用,因此再也無法從星座圖中對相位噪聲進(jìn)行判斷。
從圖3中得出CPE的影響主要是導(dǎo)致星座圖的旋轉(zhuǎn),影響最為嚴(yán)重;而ICI是相位噪聲高階頻譜分量引入,其影響則與高斯白噪聲相似,對于航空試飛遙測的OFDM系統(tǒng)來說,目前穩(wěn)定實(shí)現(xiàn)的空地?zé)o線鏈路的傳輸速率在15Mb/s以內(nèi),因此更重視對CPE的糾正。長期以來,針對相位噪聲的檢測和糾正有很多算法,但很多算法是面向無導(dǎo)頻系統(tǒng)的;面向?qū)ьl系統(tǒng)的算法要么是以硬判決為主,要么復(fù)雜度太高,系統(tǒng)開銷很大[6-11],因此本文提出一種改進(jìn)的基于導(dǎo)頻的相位噪聲糾正方法——試飛遙測相位噪聲糾正算法。
2 試飛遙測相位噪聲糾正算法
2.1 相位噪聲糾正模塊在系統(tǒng)中的位置
CPE糾正模塊應(yīng)放在信道估計(jì)模塊之前。原因如下:1)相位噪聲源自晶振的不穩(wěn)定,從式(3)中可以看出這種不穩(wěn)定因子ψ(t)對CPE和ICI都有影響;2)分析相位噪聲的功率譜密度可知,相位噪聲的帶寬為數(shù)百赫茲,而多普勒頻移一般僅幾十赫茲。因此相位噪聲相對信道相應(yīng)來說是時(shí)間不相關(guān)的,僅用基于時(shí)域插值的信道估計(jì)無法有效地跟蹤相位噪聲的變化,所以相位噪聲糾正和信道估計(jì)和均衡要分為兩個(gè)步驟。
此外,如果相位噪聲糾正模塊放在信道估計(jì)和均衡后面,那么未被消除的相位噪聲會在導(dǎo)頻處被估計(jì)出,經(jīng)過時(shí)域插值,相位噪聲會被擴(kuò)散到其他OFDM符號中,會對于信道估計(jì)的準(zhǔn)確性產(chǎn)生影響。所以有必要將相位噪聲糾正模塊放在前面,首先糾正相位噪聲影響。
2.2 算法的改進(jìn)
從前面的分析可知,同一個(gè)OFDM符號內(nèi)不同子載波上的CPE是基本相同的,因此可以在接收端提取連續(xù)導(dǎo)頻信號,計(jì)算得到其接收值與預(yù)期值之間的相位偏移(CPE),隨后用估計(jì)到的CPE對所有子載波上的信號進(jìn)行補(bǔ)償。需要在每一個(gè)OFDM符號上都要進(jìn)行CPE的估計(jì)和糾正操作。
這里提出的改進(jìn)優(yōu)化措施是,采用連續(xù)導(dǎo)頻(CP)估計(jì)CPE之前,先對連續(xù)導(dǎo)頻進(jìn)行信道響應(yīng)的補(bǔ)償。這是由于對于航空試飛遙測來說,在空地?zé)o線衰落信道中,信道響應(yīng)的相位分布較廣,而CPE的大小與解調(diào)器性能關(guān)系很大,在單個(gè)符號上,連續(xù)導(dǎo)頻的旋轉(zhuǎn)既有信道響應(yīng)的分量,也有CPE分量,而符號內(nèi)的連續(xù)導(dǎo)頻的相位平均不能保證使信道分量趨向于零,特別是取少量連續(xù)導(dǎo)頻估計(jì)CPE。所以在估計(jì)CPE前,先對CP執(zhí)行信道補(bǔ)償是必須的。為了估計(jì)出準(zhǔn)確的信道系數(shù),并且壓制CPE分量,采用時(shí)域平均的方法。平均的符號個(gè)數(shù),一方面決定平均的效果,另一方面取決于多普勒頻率,需要仿真確認(rèn)。
2.3 算法的實(shí)現(xiàn)
試飛遙測相位噪聲糾正算法原理框圖如圖4所示,該算法的具體實(shí)現(xiàn)過程如下:
1)連續(xù)導(dǎo)頻的信道補(bǔ)償。用時(shí)域平均方法,對連續(xù)導(dǎo)頻位置進(jìn)行信道估計(jì)和補(bǔ)償。
用前后各N1個(gè)符號及當(dāng)前符號的連續(xù)導(dǎo)頻進(jìn)行平均得到信道系數(shù)Hl;再用信道系數(shù)的共軛Hl*與對應(yīng)的連續(xù)導(dǎo)頻相乘,以補(bǔ)償信道響應(yīng)造成的幅角變化。
2)連續(xù)導(dǎo)頻選擇。從信道補(bǔ)償后的連續(xù)導(dǎo)頻中選擇信道響應(yīng)|Hl|較大的若干個(gè)導(dǎo)頻信號Y?m,d。 選擇的導(dǎo)頻數(shù)目N2需要通過仿真確定。
3)CPE估計(jì)。針對已經(jīng)選定的N2個(gè)導(dǎo)頻,計(jì)算接收到的導(dǎo)頻信號相位和本地生成的導(dǎo)頻相位之間的相位差,然后對其進(jìn)行平均得到CPE的估計(jì)值ψ?CPE,m。
4)CPE 糾正。 利用計(jì)算得到的 CPE ψ?CPE,m對所有子載波上的信號進(jìn)行相位旋轉(zhuǎn)。
至此已經(jīng)將CPE糾正,可以將處理完的數(shù)據(jù)送入信道估計(jì)和頻域均衡模塊。

圖4 試飛遙測相位噪聲糾正算法原理框圖
3 計(jì)算機(jī)仿真驗(yàn)證
依據(jù)圖4試飛遙測相位噪聲糾正算法原理框圖,搭建了飛行試驗(yàn)遙測系統(tǒng)仿真平臺,對試飛遙測相位噪聲糾正算法進(jìn)行了計(jì)算機(jī)仿真實(shí)驗(yàn),主要是通過檢測不同條件下的系統(tǒng)誤碼率來驗(yàn)證相位噪聲糾正算法的性能優(yōu)劣,從而檢驗(yàn)該算法的可行性,以及是否滿足設(shè)計(jì)要求。
3.1 相位噪聲糾正算法的仿真效果
設(shè)定信噪比為8.8 dB,采用64QAM調(diào)制,相位噪聲強(qiáng)度范圍為0.06~0.33dB,相位噪聲帶寬范圍為500~4500Hz,有試飛遙測相位噪聲糾正算法(CPEC)和沒有相位噪聲糾正算法兩種不同的情況下,通過對比系統(tǒng)誤碼率來評估算法性能,根據(jù)統(tǒng)計(jì)的誤碼率結(jié)果繪制的仿真曲線分別如圖5和圖6所示。

圖5 不同相位噪聲強(qiáng)度條件下的系統(tǒng)誤碼率

圖6 不同相位噪聲帶寬條件下的系統(tǒng)誤碼率
圖5是選取相位噪聲強(qiáng)度分別為0.12 dB和0.15 dB條件下,改變相位噪聲帶寬從500~4 500 Hz范圍變化,紅色折線表示沒有相位噪聲糾正算法條件下系統(tǒng)的誤碼率,藍(lán)色折線表示有試飛遙測相位噪聲糾正算法條件下系統(tǒng)的誤碼率。從圖5(a)和圖5(b)中可以看出,當(dāng)相位噪聲強(qiáng)度一定時(shí),相位噪聲帶寬在500~3500Hz之間變化時(shí),藍(lán)線的誤碼率明顯低于紅線的誤碼率,證明該CPEC算法有效;而當(dāng)相位噪聲帶寬在3500~4500Hz之間變化時(shí),藍(lán)線和紅線的誤碼率接近,說明性能相當(dāng)。
圖6是選取相位噪聲帶寬分別為1 500 Hz和2 500 Hz條件下,改變相位噪聲強(qiáng)度從0.06 dB和0.33dB范圍變化,紅色折線表示沒有相位噪聲糾正算法條件下系統(tǒng)的誤碼率,藍(lán)色折線表示有試飛遙測相位噪聲糾正算法條件下系統(tǒng)的誤碼率。從圖6(a)和圖6(b)中可以看出,當(dāng)相位噪聲帶寬一定時(shí),相位噪聲帶寬在0.06~0.33dB之間變化時(shí),藍(lán)線的誤碼率明顯低于紅線的誤碼率,證明該CPEC算法有效。
綜合圖5和圖6中不同模式的仿真結(jié)果可知,在不同的相位噪聲帶寬條件下,對于相位噪聲強(qiáng)度的耐受力也不同,噪聲帶寬越寬,對于強(qiáng)度的耐受力越差,相位噪聲糾正算法的性能也有所不同,而本文提出的試飛遙測相位噪聲糾正算法可以很好地提高遙測信號質(zhì)量,降低系統(tǒng)誤碼率。
3.2 與傳統(tǒng)方法的性能仿真對比
設(shè)定信噪比為8.8 dB,采用64QAM調(diào)制,選取相位噪聲強(qiáng)度為0.12dB、相位噪聲帶寬為1500Hz和相位噪聲強(qiáng)度為0.15dB、相位噪聲帶寬為2500Hz,有試飛遙測相位噪聲糾正算法(CPEC)、傳統(tǒng)的相位噪聲糾正算法(CPET)以及沒有相位噪聲算法(No CPE)的3種不同的情況下,通過對比系統(tǒng)誤碼率來評估算法性能。根據(jù)統(tǒng)計(jì)的誤碼率結(jié)果繪制的仿真曲線圖如圖7所示。

圖7 3種不同模式下的系統(tǒng)誤碼率仿真對比
可以看出,本文提出的試飛遙測相位噪聲糾正算法可以很好的降低系統(tǒng)誤碼率,而在相同的相位噪聲帶寬和相位噪聲強(qiáng)度的條件下,采用試飛遙測相位噪聲糾正算法后,系統(tǒng)性能得到明顯改善。
4 實(shí)際應(yīng)用效果
理論分析和計(jì)算機(jī)仿真驗(yàn)證完成后,基于試飛遙測相位噪聲糾正算法設(shè)計(jì)了相位噪聲糾正模塊,研制了“地面無線網(wǎng)絡(luò)收發(fā)器”(設(shè)備中嵌入“相位噪聲糾正模塊”),根據(jù)圖1搭建基于OFDM技術(shù)的飛行試驗(yàn)遙測發(fā)射/接收系統(tǒng),主要檢測地面接收的機(jī)載實(shí)時(shí)播放視頻的性能,其中包括視頻播放的流暢度、清晰度和誤碼率等技術(shù)指標(biāo)。相位噪聲糾正算法的性能檢測也通過視頻數(shù)據(jù)解碼的數(shù)據(jù)包響應(yīng)時(shí)間、誤碼率等技術(shù)指標(biāo)來驗(yàn)證。
該基于OFDM技術(shù)的飛行試驗(yàn)遙測發(fā)射/接收系統(tǒng)先后經(jīng)過跑車試驗(yàn)、大閉環(huán)測試、地面拉距測試3種類型的地面試驗(yàn)測試,然后將設(shè)備安裝到試驗(yàn)機(jī)上進(jìn)行了3個(gè)架次的空中飛行試驗(yàn)驗(yàn)證,地面接收的機(jī)載視頻畫面的截圖如圖8所示,數(shù)據(jù)實(shí)時(shí)播放正常,畫面流暢,無馬賽克現(xiàn)象。試飛遙測相位噪聲糾正算法的使用效果的實(shí)驗(yàn)數(shù)據(jù)如表1所示。

表1 試飛遙測相位噪聲糾正算法的效果
試驗(yàn)結(jié)果表明,在遙測接收信號傳輸速率相同的情況下,無論從遙測傳輸距離、數(shù)據(jù)包響應(yīng)時(shí)間和誤碼率等方面,采用試飛遙測相位噪聲糾正算法后的系統(tǒng)性能均優(yōu)于傳統(tǒng)的相位噪聲糾正算法,其中遙測傳輸距離提高9.7%,數(shù)據(jù)包響應(yīng)時(shí)間縮短8.8%,誤碼率減小5.9%;同時(shí)遙測距離越近,信號質(zhì)量越好,數(shù)據(jù)包響應(yīng)時(shí)間越短,系統(tǒng)誤碼率也越低。因此試飛遙測相位噪聲糾正算法對相位噪聲起到了很好的抑制作用,明顯增強(qiáng)了遙測接收信號的抗干擾能力,試飛遙測系統(tǒng)的性能因此顯著提升,為航空飛行試驗(yàn)做出了一定的貢獻(xiàn)。

圖8 實(shí)時(shí)解調(diào)的圖像傳輸畫面截圖
5 結(jié)束語
本文提出一種適用于航空飛行試驗(yàn)遙測領(lǐng)域的OFDM技術(shù)的相位噪聲糾正算法,該算法根據(jù)試飛空地?zé)o線信道的特點(diǎn),用連續(xù)導(dǎo)頻取代了硬判決,并且對連續(xù)導(dǎo)頻位置進(jìn)行了信道估計(jì)和補(bǔ)償,再通過選取一定數(shù)量的連續(xù)導(dǎo)頻進(jìn)行相位噪聲估計(jì)和糾正。通過理論分析、計(jì)算機(jī)仿真驗(yàn)證和實(shí)際使用效果可以看出,算法能夠較好地保證抑制相位噪聲的范圍和精度,在相位噪聲功率較高的環(huán)境中也能達(dá)到良好效果,能夠滿足航空飛行試驗(yàn)領(lǐng)域的技術(shù)要求,而且算法復(fù)雜度不高,有一定的實(shí)用價(jià)值,也可以推廣到其他無線通信應(yīng)用領(lǐng)域。
[1]iNET system Architecture Version 2007.1[S/OL].[2016-11-15].http://www.irig106.org.
[2]白效賢,楊廷梧,袁納南.航空飛行試驗(yàn)遙測技術(shù)發(fā)展趨勢與對策[J].測控技術(shù),2010,34(2):10-16.
[3]清華大學(xué)數(shù)字電視傳輸技術(shù)研發(fā)中心.地面數(shù)字電視傳輸技術(shù)白皮書[M].北京:清華大學(xué)出版社,2004:56-83.
[4]RYU H G, LI Y, RARK J S.An improved ICI reduction method in OFDM communication system[J].IEEE Transactions on Broadcasting,2005,51(3):395-400.
[5]BIBI A,SHAH A A, KHATTAK S.Iterative commom phase error correction in OFDM system[C]//Frontiers of Information Technology.Islamabad:IEEE,2011:258-262.
[6]MA C Y,WU C Y,HUANG C C.A simple ICI suppression method utilizing cyclic prefix for OFDM system in the presence of phase noise[J].IEEE Transactions on Communications,2013,61(11):4539-4550.
[7]KIM J H,KIM W W.Frequency domain_DFE coupled with common phase error tracking loop in OFDM systems[J].IEEE VehicularTechnology Conference,2005(2):1248-1252.
[8]陳宜文,許斌,郝建華,等.電力線噪聲信道下基于小波包變換的OFDM信號檢測[J].電子測量技術(shù),2015,38(12):111-115.
[9]MSTHECKEN P, RIIHONEN T, WERNER S, et al.Performance analysis of OFDM with wiener phase noise and frequency selective fading channel[J].IEEE Transactions on Comumnications,2011,59(5):1321-1331.
[10]YANG F, WANG J, SONG J, et al.Phase noise correction based on TPS symbols for the Chinese DTTB system[J].IEEE Transactions on Broadcasting,2008,54(4):799-805.
[11]YUE L, ZHAO D, YANG J.Iterative phase noise miti gation for turbo coded OFDM system[J].International Conference on Communications,2006(2):1197-1201.
(編輯:李剛)
An algorithm of phase noise correction for telemetry system in flight test
WANG Zhongjie
(Chinese Flight Test Establishment,Xi'an 710089,China)
As the phase noise of telemetry receiver has a great impact on the performance of OFDM (orthogonal frequency division multiplexing) system in telemetry during flight test which is a key link in the field of aviation flight test,an improved algorithm of phase noise correction is presented in this paper.According to the features of wireless channel,the algorithm conducts channel estimation and compensation at the continuous pilots to control the CPE(common phase error) residues in the channel coefficients, and then select continuous pilots meeting requirements to finish CPE estimation and correction and send the data into channelestimation module.Theoretical analysis,computer simulation and actual flight test verification prove that the algorithm has good performance in ensuring phase noise suppression range and precision and effectively reducing system error rate.With low algorithm complexity,it satisfies the technical requirement of flight test and has certain practical values.
flight test; phase noise correction; OFDM; continuous pilots; CPE; channel estimation
A
1674-5124(2017)06-0001-06
10.11857/j.issn.1674-5124.2017.06.001
2016-11-29;
2017-01-05
國防基礎(chǔ)科研項(xiàng)目(A0520132031)
王仲杰(1981-),男,山西懷仁縣人,研究員,主要從事機(jī)載測試技術(shù)研究和測試系統(tǒng)構(gòu)建工作。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價(jià)·高一版(2020年6期)2020-11-02 02:45:24
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
鑿巖機(jī)械氣動工具(2016年3期)2016-03-01 04:00:25
